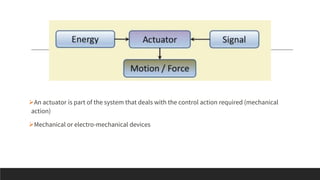
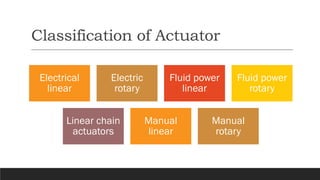
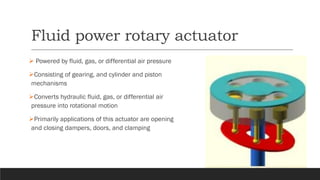
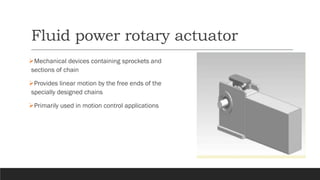
This document discusses IoT sensing and provides information on sensors and actuators. It defines sensors and their characteristics such as accuracy, range, resolution, sensitivity, and drift. Sensors are classified as passive/active, analog/digital, and scalar/vector. The document also defines actuators and their types, including electric linear/rotary actuators, fluid power linear/rotary actuators, linear chain actuators, and manual linear/rotary actuators. Actuators convert control signals or different forms of energy into mechanical motion or action.