Downloaded 25 times
![Dynamics of Rotational Motion
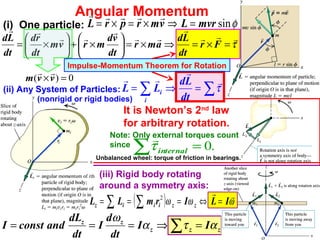
The main problem of dynamics: How a net force affects
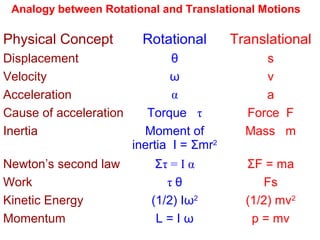
(i) translational (linear) motion (Newtons’ 2nd
law)
(ii) rotational motion ???
(iii) combination of translational
and rotational motions ???
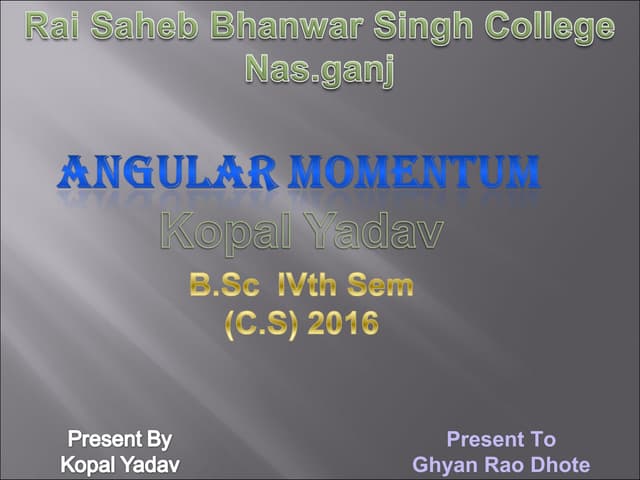
amF
=⇒
m F
αz
Axis of
rotation
a
Level arm l is the distance between the
line of action and the axis of rotation,
measured on a line that is to both.⊥
Definition of torque: Fr
×=τ
A torque applied to a door
Units: [ τ ] = newton·meter = N·m
τz > 0 if the force acts counterclockwise
τz < 0 if the force acts clockwise](https://image.slidesharecdn.com/ch10-140325091600-phpapp01/85/Ch10-1-320.jpg)
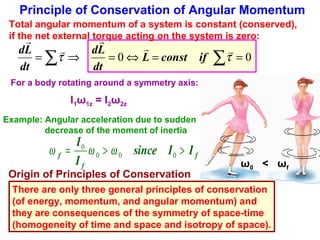
![Dynamics of Rotational Motion
The main problem of dynamics: How a net force affects
(i) translational (linear) motion (Newtons’ 2nd
law)
(ii) rotational motion ???
(iii) combination of translational
and rotational motions ???
amF
=⇒
m F
αz
Axis of
rotation
a
Level arm l is the distance between the
line of action and the axis of rotation,
measured on a line that is to both.⊥
Definition of torque: Fr
×=τ
A torque applied to a door
Units: [ τ ] = newton·meter = N·m
τz > 0 if the force acts counterclockwise
τz < 0 if the force acts clockwise](https://image.slidesharecdn.com/ch10-140325091600-phpapp01/75/Ch10-1-2048.jpg)
![I n [ 2 8 ] : = f s _ : N I n t e g r a t e 1 S q r t 1 x x s x 6 s , x , 0 , s ;
P l o t f s , 1 , s , 0 , 1
O u t [ 2 9 ] =
0 .2 0 .4 0 .6 0 .8 1 .0
1 .0
1 .1
1 .2
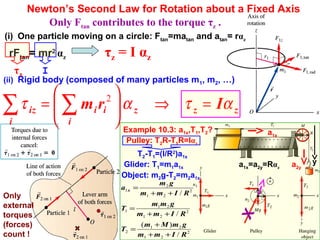
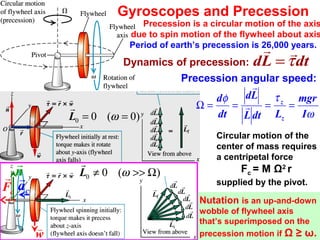
Hinged board (faster than free fall)
α
h=L sinα
Mg
m Ball: 0
2
sin)/2(/22/ αgLvhtmvmgh ball ==⇒=
Board: I=(1/3)ML2
∫
∫
−−
=
−
=
−=−
≡=
−
0
0
sin
0 0
2
0
0 0
0
222
0
))(sin1(sin6
1
sinsin3
)sin(sin
3
2
)/(
322
α
α
αα
αα
α
αα
α
αω
xx
dx
t
t
d
g
L
t
L
g
dt
d
dtdMLIhh
Mg
ball
cup
cup
0sinα
ball
cup
t
t
0
0 50≈αCritical3/2](https://image.slidesharecdn.com/ch10-140325091600-phpapp01/85/Ch10-10-320.jpg)

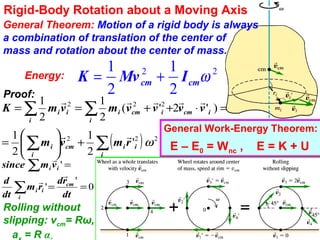
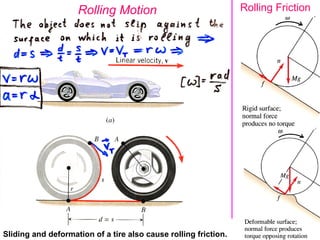
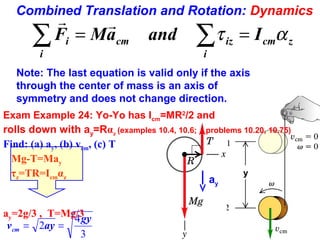
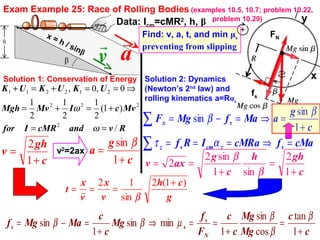
1) The document discusses dynamics of rotational motion, including Newton's second law for rotation which states that torque equals the product of moment of inertia and angular acceleration. 2) It defines important rotational concepts like torque, angular momentum, moment of inertia, and establishes relationships between them using principles like conservation of energy and angular momentum. 3) Examples are provided to demonstrate applications of rotational dynamics like rolling motion without slipping, combined translation and rotation, gyroscopes and precession. Analogies between rotational and translational motions are also highlighted.