Download as PDF, PPTX
![Duhamel’s Solution
Structural
Dynamics
& Earthquake
Engineering
Dr Alessandro
Palmeri
This integral solution can be extended to systems with many
state variables as:
t
y(t) = Θ(t) · y(0) +
Θ(t − τ ) · b f (τ ) dτ
(8)
0
where the array y0 = y(0) collects the initial conditions at
time t = 0, and the transition matrix Θ(t) is evaluated as the
exponential matrix of [A t]:
Θ(t) = eA t
(9)](https://image.slidesharecdn.com/lectures67-140218072430-phpapp02/85/SDEE-Lecture-6-4-320.jpg)
![Step-by-Step Numerical Solution
Structural
Dynamics
& Earthquake
Engineering
Dr Alessandro
Palmeri
For t = ∆t, and assuming a linear variation of the forcing
term f (t) in the time interval [0, ∆t]:
f (t) = f0 +
f1 − f0
t
∆t
(10)
one can mathematically prove that the Duhamel’s integral
gives:
y1 = Θ(∆t) · y0 + Γ0 (∆t) · {b f0 } + Γ1 (∆t) · {b f1 }
(11)
where y1 = y(∆t) collects the state variables at t = ∆t,
while the integration matrices Γ0 (∆t) and Γ1 (∆t) can be
computed from the transition matrix Θ(∆t) and the matrix of
coefficients A.](https://image.slidesharecdn.com/lectures67-140218072430-phpapp02/85/SDEE-Lecture-6-5-320.jpg)
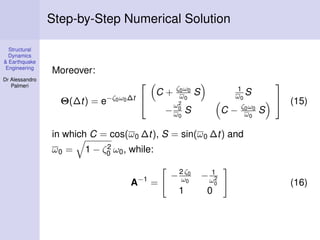
![Step-by-Step Numerical Solution
Structural
Dynamics
& Earthquake
Engineering
Dr Alessandro
Palmeri
That is:
Γ0 (∆t) = [Θ(∆t) − L(∆t)] · A−1
(12)
Γ1 (∆t) = [L(∆t) − I2 ] · A−1
(13)
in which I2 is the 2-dimensional identity matrix, while the
loading matrix L(∆t) is given by:
L(∆t) =
1
[Θ(∆t) − I2 ] · A−1
∆t
(14)](https://image.slidesharecdn.com/lectures67-140218072430-phpapp02/85/SDEE-Lecture-6-6-320.jpg)
![Step-by-Step Numerical Solution
Structural
Dynamics
& Earthquake
Engineering
Dr Alessandro
Palmeri
The incremental solution offered by Eq. (11) for the time
interval [0, ∆t] can be extended to a generic time instant
tn = n ∆t as:
yn+1 = y(tn+1 ) =Θ(∆t) · yn
+ Γ0 (∆t) · {b f (tn )}
+ Γ1 (∆t) · {b f (tn+1) }
for n = 1, 2, 3, · · ·
(17)](https://image.slidesharecdn.com/lectures67-140218072430-phpapp02/85/SDEE-Lecture-6-8-320.jpg)

1) The document discusses the state-space formulation and numerical solution of the equation of motion for a single-degree-of-freedom oscillator subjected to earthquake ground motion. 2) It presents the state-space representation using state variables of displacement and velocity, and defines the transition matrix used to solve the equation of motion incrementally over time. 3) The solution is obtained by dividing the time interval into steps of size Δt, and computing the state variables at each step using the transition matrix and integration matrices dependent on the transition matrix.
































































