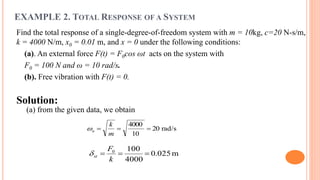
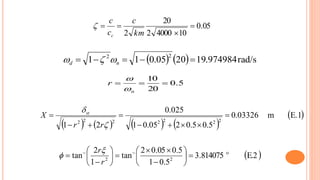
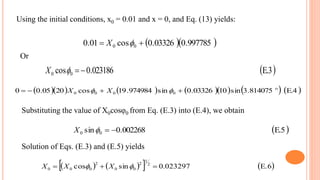
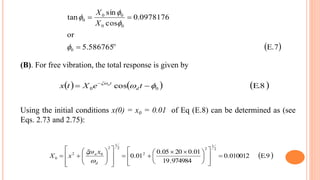
This document provides information about the dynamics of machinery course for several mechanical engineering students. It includes the learning objectives, symbols and definitions, response of a damped system under harmonic motion, an example problem, and key concepts about magnification factor, phase angle, and total response of a system. The example calculates the total response of a single-degree-of-freedom system subjected to an external harmonic force and free vibration.


![X and ϕ are given by Eqs. (7) and (8), respectively, X0 and ϕ0 [different from those of
Eq. (2)] can be determined from the initial conditions. For the initial conditions
x(t=0)= x0, and x(t=0)=x0 Eq. (11) yields
nd 2
1
12sinsincos
coscos
00000
000
XXXx
XXx
dn
11coscos 00
tXteXtx d
tn
The solution of Eq. (12) gives X0and ϕ0 as
13
cos
sincos
tan
sincos
1
cos
0
0
0
2
1
2
002
2
00
Xx
XXxx
XXxxXxX
d
nn
nn
d
](https://image.slidesharecdn.com/mech6051-55-180529050731/85/Damped-system-under-Harmonic-motion-15-320.jpg)























![[W f stoecker]_refrigeration_and_a_ir_conditioning_(book_zz.org)](https://cdn.slidesharecdn.com/ss_thumbnails/wfstoeckerrefrigerationandairconditioningbookzz-161019162540-thumbnail.jpg?width=640&height=640&fit=bounds)



















































