Download to read offline



![+ ∧ + ∧ + ∧ +
+ + ∧ ∧ + = −
m m m m
m m
x Ω x Ω x Ω v
a Ω Ω x kx F bx
¨ ˙ 2 ˙
˙
0
0 (3)
where =a v˙0 0 is the external acceleration.
In the following, we will consider the external velocity v0 and ac-
celeration a0 small enough to make the terms ∧mΩ v0 and ma0 neg-
ligible in equation (3). For later use, one can also re-write the equations
of motion (3) in the form:
+ + + + + +
+ + + + + +
+ + + + + +
+ + =
α α α
α α α β β
β β β β β
β β
m m
m m
x bx kx x
x
x F
¨ ˙ ( Ω˙ Ω˙ Ω˙ )
2 ( Ω Ω Ω ) ˙ ( Ω Ω
Ω ( )Ω Ω ( )Ω Ω
( )Ω Ω ) ,
x
x
y
y
z
z
x
x
y
y
z
z
xx
x
yy
y
zz
z
xy yx
x y
xz zx
x z
yz zy
y z
2 2
2
(4)
where the matrices αi
and βij have components:
= −α ε ,hk
i
ihk (5)
and
= −β δ δ δ δ ,hk
ij
ih jk ij hk (6)
with δhk the Kronecker delta and εihk the Levi-Civita symbol defined as:
=
⎧
⎨
⎩
=
− =ε
i h k x y z y z x z x y
i h k z y x x z y y x z
1 if ( , , ) ( , , ), ( , , ), ( , , )
1 if ( , , ) ( , , ), ( , , ), ( , , )
0 otherwise.
ijk
(7)
Note that the matrices αi
contain the so-called angular gains that
quantify the coupling in terms of modal masses between the two modes
coupled by the Coriolis force. For a pointwise mass structure like the
one considered in this Section, they are equal to one in modulus, but in
case of real gyroscopes with distributed mass, like the ones studied in
the following, they will be smaller than one and will play a crucial role.
By assuming resonant frequencies =ω k m/oi i
2
much larger than the
applied rate signals Ωi and supposing only slow changes of Ωi, it is
possible to neglect all the terms coming from the drag acceleration in
equation (4) and consider only the Coriolis force that couples the three
components of motion of the gyroscope proof mass. Equation (4), then,
reads:
+ + + + + =α α αm mx bx kx x F¨ ˙ 2 ( Ω Ω Ω ) ˙ .x
x
y
y
z
z (8)
2.2. Equations of motion for a real gyroscope
Real fabricated gyroscopes cannot be approximated as point mass
structures because of their complex mechanical designs made by rigid
masses and deformable structural elements, endowed with non-negli-
gible mass, properly combined. The effect of all deformable elements
(or springs) can be lumped in equivalent springs acting at the centroid x
of the device. Similarly, the non-conservative forces can be described by
an equivalent damping matrix.
Moreover, real gyroscopes are affected by fabrication imperfections
(i.e. small asymmetries in the deformable elements), as a consequence,
it is no more possible to consider the three translational motions of the
mass as decoupled. Extra-diagonal terms in the equivalent stiffness and
damping matrices are added to take into account such fabrication im-
perfections and consequent motion coupling.
The first three real modes of the structure, which are designed to be
three ideal pure translational modes in the directions x, y and z, are
actually characterized by non-uniform displacement fields, s (see
Fig. 2b), that are here represented as:
=
⎡
⎣
⎢
⎢
⎤
⎦
⎥
⎥
= φx y z t
φ x y z u t
φ x y z u t
φ x y z u t
ts x u( , , , )
( , , ) ( )
( , , ) ( )
( , , ) ( )
( ) ( ),
x
x
y
y
z
z (9)
where φ x( ) is the diagonal matrix containing the three nondimensional
modal shape functions φx, φy, φz describing the three main modes
actuated by on board actuators in a real gyroscope (see Section 5) and
=t u t u t u tu ( ) [ ( ), ( ), ( )]T
x y z is the time evolution of the system's re-
sponse with ux, uy and uz the amplitudes of the three modes. Note that,
rotational degrees of freedom will not be included in the present for-
mulation. This simplification is justified by the assumption that a
proper mechanical design would allow to obtain rotational modes at
very high frequencies with respect to those of the translational modes.
Denoting by ρ the density of the distributed mass with volume V, the
kinetic and potential energy of the real gyroscope read:
T
V V
∫= ⋅ = + + ∧ +
= ⋅ +
ρ Vv v v v s Ω s x
s x k s x
d with ˙ ( ),
( ) ( ) ,
V
eq ext
1
2 0 0
1
2 (10)
where keq is the non-diagonal equivalent stiffness matrix. The vector of
the generalized forces Q is constituted by the damping forces − b s x˙ ( )eq
with beq equivalent damping matrix that takes into account the fabri-
cation imperfections through extra-diagonal terms.
Neglecting again contributions coming from the external velocity
and acceleration, by substituting equation (10) into (2), the equations
of motion of a real three-axial gyroscope are derived. They read:
+ + + + + + +
+ + + + + + +
+ + + + +
α α α α
α α β β β β
β β β β β
mu bu ku u
u
u = F
¨ ˙ (Ω˙ ˆ Ω˙ ˆ Ω˙ ˆ ) 2(Ω ˆ
Ω ˆ Ω ˆ ) ˙ (Ω ˆ Ω ˆ Ω ˆ Ω Ω ( ˆ
ˆ ) Ω Ω ( ˆ ˆ ) Ω Ω ( ˆ ˆ ))
x
x
y
y
z
z
x
x
y
y
z
z
x
xx
y
yy
z
zz
x y
xy
yx
x z
xz zx
y z
yz zy
2 2 2
(11)
where, m is the diagonal mass matrix whose non-zero elements are the
modal masses of the three modes of interest, k is the stiffness matrix
that contains extra-diagonal terms coming from the fabrication im-
perfections, αˆi
and βˆij
, with =i j x y z, , , , are the coupling matrices that
arise because of the presence of the external angular velocities.
The matrices m, b and k have components mhk, bhk and khk re-
spectively with h and k taking values x, y and z. The terms of the ma-
trices m, b, k, αˆ and βˆ are defined as:
∫
∫
∫
= =
= =
= =
= − =
= − =
m ρφ φ δ V h k x y z
b φ b φ h k x y z
k φ k φ h k x y z
α ρε φ φ V i h k x y z
β ρ φ φ δ δ δ δ φ V i j h k x y z
x x
x x
d , , ,
( )( ) ( ) , , ,
( )( ) ( ) , , ,
ˆ d , , , ,
ˆ ( ( ) )d , , , , ,
hk
V
h k
hk
hk
h
eq hk
k
hk
h
eq hk
k
hk
i
V
ihk
h k
hk
ij
V
h k
ih jk ij hk
h 2
(12)
where the summation over repeated indices is not considered.
The angular gain αhk
i
with =i h k x y z, , , , of the distributed-mass
gyroscope is defined as the ratio between αˆhk
i
and the modal mass mhh
as:
= − =α
α
m
i h k x y z
ˆ
(distributed mass) , , , , .hk
i hk
i
hh (13)
Note that in the limit of pointwise mass →φ 1h , →m mhh and
equation (13) coincides with equation (5). In general, since φh vary in
space, the entries of the angular gain matrices αi
differ from unit.
Finally, note that the external velocities and accelerations can be
neglected even when the external acceleration is not negligible; it is
possible in fact to null their contributions through the design of a dif-
ferential mechanical structure as shown in Zega et al. (2017b).
3. Phasor analysis
The equations of motion presented in the previous section are, here,
solved through the phasor method (see Kline et al. (2013b)) both for the
case of an ideal point-mass gyroscope and for a real gyroscope.
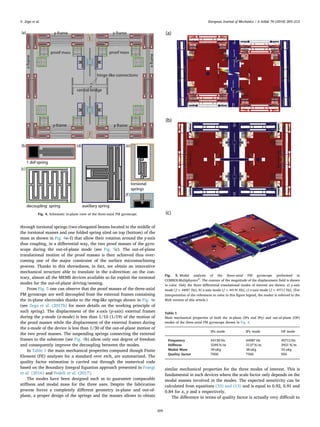
V. Zega et al. European Journal of Mechanics / A Solids 70 (2018) 203–212
205](https://image.slidesharecdn.com/1-s2-200404024819/85/1-s2-0-s0997753817308902-main-3-320.jpg)
![3.1. Ideal gyroscope
Accounting for relations (5)–(6), the vectorial equation (4) can be
written in the scalar form:
+ − + + − + +
+ − + + =
+ − + + − + +
+ + + − =
+ − + + − + +
+ − + + =
mx b x m y m z k x m x
m y m z F
my b y m z m x k y m y
m x m z F
mz b z m x m y k z m z
m x m y F
¨ ˙ 2 Ω ˙ 2 Ω ˙ (Ω Ω )
(Ω Ω Ω˙ ) (Ω˙ Ω Ω ) ,
¨ ˙ 2 Ω ˙ 2 Ω ˙ (Ω Ω )
(Ω Ω Ω˙ ) (Ω Ω Ω˙ ) ,
¨ ˙ 2 Ω ˙ 2 Ω ˙ (Ω Ω )
(Ω Ω Ω˙ ) (Ω˙ Ω Ω ) .
x z y x z y
x y z y x z x
y x z y z x
x y z z y x y
z y x z x y
x z y x y z z
2 2
2 2
2 2
(14)
In order to make clearer the link between the results for the ideal
gyroscope and those for a real one, we keep here the notation with αhk
i
and βhk
ij
, without substituting their values given in (5)–(6). Equation
(14) will hence be written in the form:
⎜ ⎟
⎜ ⎟
⎜ ⎟ ⎜ ⎟
⎜ ⎟
+ + + + + + +
+ ⎛
⎝
+ ⎞
⎠
+ + =
+ + + + + ⎛
⎝
+ ⎞
⎠
+
+ ⎛
⎝
+ ⎞
⎠
+ ⎛
⎝
+ ⎞
⎠
=
+ + + + + + +
+ + + ⎛
⎝
+ ⎞
⎠
=
mx b x mα y mα z k x m β β x
m β α y m β α z F
my b y mα z mα x k y m β β y
m β α x m β α z F
mz b z mα x mα y k z m β β z
m β α x m β α y F
¨ ˙ 2 Ω ˙ 2 Ω ˙ ( Ω Ω )
Ω Ω Ω˙ ( Ω Ω Ω˙ ) ,
¨ ˙ 2 Ω ˙ 2 Ω ˙ Ω Ω
Ω Ω Ω˙ Ω Ω Ω˙ ,
¨ ˙ 2 Ω ˙ 2 Ω ˙ ( Ω Ω )
( Ω Ω Ω˙ ) Ω Ω Ω˙ ,
x xy
z
z xz
y
y x x
z
z x
y
y
xy
xy
x y xy
z
z xz
xz
x z xz
y
y x
y yz
x
x yx
z
z y y
z
z y
x
x
yx
yx
x y yx
z
z yz
yz
z y yz
x
x y
z zx
y
y zy
x
x z z
x
x z
y
y
zx
zx
x z zx
y
y zy
zy
y z zy
x
x z
2 2
2 2
2 2
(15)
where the double identical index has been substituted by a single one
for the sake of clarity.
In order to compensate for losses and to sustain the oscillation of the
gyroscope proof mass according to the three translational modes of
interest, the excitation forces can be written in the form
= F e F e F eF [(i ) , (i ) , (i ) ]T
x
ϕ
y
ϕ
zs
ϕi i ix y z with i imaginary unit, since at re-
sonance, the force needed to sustain the oscillation is in quadrature
with the displacement. Moreover, in the control circuit, the phase of the
forcers are derived directly from the phase of the gyroscope output, so it
is possible to say that, supposing a high quality factor Q for all the three
resonators, the complex solution of (15) can be constituted by three
sinusoidal oscillations near to the mechanical resonant frequency of
each axis, of the form:
⎡
⎣
⎢
⎤
⎦
⎥=
⎡
⎣
⎢
⎢
⎤
⎦
⎥
⎥
=u
u
u
u
A e
A e
A e
,
x
y
z
x
ϕ
y
ϕ
z
ϕ
i
i
i
x
y
z
(16)
where Ax, Ay, Az, ∫=ϕ ω τ τ( )dx
t
x0
, ∫=ϕ ω τ τ( )dy
t
y0
and ∫=ϕ ω τ τ( )dz
t
z0
represent the system unknowns. Ax, Ay, Az are the real, time dependent
amplitudes of the displacements of the proof mass along the three di-
rections x y, and z, while ω ω,x y and ωz are the actual resonant fre-
quencies of the three translational modes along the − −x y, and z-di-
rections. If no external angular rate is applied, =ω ωi oi with ωoi natural
frequency of the −i mode and = +ϕ ω t ψi oi i. In the following we in-
troduce the notation = −ϕ ϕ ϕΔ ij i j with =i x y z, , .
Note that Ax, Ay, Az, ωx, ωy and ωz are slowly varying relatively to
the mechanical resonant frequencies of the system, as a consequence, in
the acceleration expression, the terms containing A¨x, A¨y, A¨z, ω˙ x, ω˙ y and
ω˙ z can be neglected, as they are negligible if compared to ω A˙x x, ω A˙y y,
ω A˙z z, ωx
2
, ωy
2
and ωz
2
, respectively. Moreover, it is reasonable to assume
that the angular rate and the displacement amplitudes are slowly
varying with respect to the resonance frequency.
Under these hypotheses, by substituting equation (16) into (15) and
dividing the three equations for e ϕi x, e ϕi y and e ϕi z respectively, three
complex equations are obtained. By nulling both the real and the
imaginary parts, it is possible to obtain an expression for A˙x, A˙y, A˙ z, ωx
2
,
ωy
2
and ωz
2
.
The expressions for A˙x, A˙y and A˙ z are reported in Appendix A since
they will not be used in the following, while the expressions for ωx
2
, ωy
2
and ωz
2
under the assumption ≪A A ω˙ i i i for =i x y z, , read:
= + + +
+ + +
+ +
ω ω β β
β ϕ β ϕ
α ω ϕ α ω ϕ
Ω Ω
Ω Ω cos(Δ ) Ω Ω cos(Δ )
2 Ω sin(Δ ) 2 Ω sin(Δ ),
x ox x
z
z x
y
y
xy
xy
x y
A
A xy xz
xz
x z
A
A xz
xy
z
z y
A
A xy xz
y
y z
A
A xz
2 2 2 2
y
x
z
x
y
x
z
x (17)
= + + +
+ + +
− +
ω ω β β
β ϕ β ϕ
α ω ϕ α ω ϕ
Ω Ω
Ω Ω cos(Δ ) Ω Ω cos(Δ )
2 Ω sin(Δ ) 2 Ω sin(Δ ),
y oy y
x
x y
z
z
yx
yx
x y
A
A xy yz
yz
y z
A
A yz
yx
z
z x
A
A xy yz
x
x z
A
A yz
2 2 2 2
x
y
z
y
x
y
z
y (18)
= + + +
+ + +
− −
ω ω β β
β ϕ β ϕ
α ω ϕ α ω ϕ
Ω Ω
Ω Ω cos(Δ ) Ω Ω cos(Δ )
2 Ω sin(Δ ) 2 Ω sin(Δ ).
z oz z
x
x z
y
y
zy
zy
y z
A
A yz zx
zx
x z
A
A xz
zx
y
y x
A
A xz zy
x
x y
A
A yz
2 2 2 2
y
z
x
z
x
z
y
z (19)
By defining the velocity amplitudes as =v A ωi i i for =i x y z, , and
solving the second order equation (17) with respect to ωx, the following
expression is found:
= +
+ + +
+ + +
ω ϕ
ϕ α ϕ
α ϕ ω D
Ω Ω cos(Δ )
Ω Ω cos(Δ ) Ω sin(Δ )
Ω sin(Δ ) ,
x
β
ω x y
v
v xy
β
ω x z
v
v xz xy
z
z
v
v xy
xz
y
y
v
v xz ox x
2
2
2
xy
xy
oy
y
x
xz
xz
oz
z
x
y
x
z
x (20)
where
⎜ ⎜ ⎟
⎟
= + + ⎛
⎝
⎛
⎝
⎞
⎠
+
+ + +
+ ⎞
⎠
D β β ϕ
ϕ α ϕ
α ϕ
Ω Ω Ω Ω cos Δ
Ω Ω cos(Δ ) Ω sin(Δ )
Ω sin(Δ ) .
x x
z
z x
y
y
β
ω x y
v
v xy
β
ω x z
v
v xz xy
z
z
v
v xy
y
y
v
v
2 2
2
2
xz xz
2
xy
xy
oy
y
x
xz
xz
oz
z
x
y
x
z
x
(21)
By proceeding in the same way for the other two axes and by noting
that ≫ω Doi i
2
for =i x y z, , , the instantaneous frequencies of oscillation
along the x-, y- and z-axis are derived:
= + +
+ +
+ +
ω ω ϕ
ϕ
α ϕ α ϕ
Ω Ω cos(Δ )
Ω Ω cos(Δ )
Ω sin(Δ ) Ω sin(Δ ),
x ox
β
ω x y
v
v xy
β
ω x z
v
v xz
xy
z
z
v
v xy xz
y
y
v
v xz
2
2
xy
xy
oy
y
x
xz
xz
oz
z
x
y
x
z
x (22)
= + +
+ +
+ −
ω ω ϕ
ϕ
α ϕ α ϕ
Ω Ω cos(Δ )
Ω Ω cos(Δ )
Ω sin(Δ ) Ω sin(Δ ),
y oy
β
ω x y
v
v xy
β
ω y z
v
v yz
yz
x
x
v
v yz yx
z
z
v
v xy
2
2
yx
yx
ox
x
y
yz
yz
oz
z
y
z
y
x
y (23)
= + +
+ +
− −
ω ω ϕ
ϕ
α ϕ α ϕ
Ω Ω cos(Δ )
Ω Ω cos(Δ )
Ω sin(Δ ) Ω sin(Δ ).
z oz
β
ω x z
v
v xz
β
ω y z
v
v yz
zx
y
y
v
v xz zy
x
x
v
v yz
2
2
zx
zx
ox
x
z
zy
zy
oy
y
z
x
z
y
z (24)
3.2. Real gyroscope
By applying the same procedure to the equation of motion (11) of a
V. Zega et al. European Journal of Mechanics / A Solids 70 (2018) 203–212
206](https://image.slidesharecdn.com/1-s2-200404024819/85/1-s2-0-s0997753817308902-main-4-320.jpg)






This document summarizes a new type of three-axial MEMS gyroscope that uses frequency modulation (FM) as its working principle. It begins by describing the dynamics of MEMS gyroscopes, including equations of motion for both an ideal point mass gyroscope and a real distributed mass gyroscope. It then introduces the FM working principle and how it offers improved stability compared to existing amplitude modulated gyroscopes. The document proposes the mechanical design of the first three-axial FM gyroscope, which overcomes limitations of typical fabrication processes. Preliminary experimental tests on a prototype validate the model and simulation results used in the design process.































































