
Downloaded 56 times




![International Journal of Modern Research in Engineering and Technology (IJMRET)
www.ijmret.org Volume 3 Issue 4 ǁ April 2018.
w w w . i j m r e t . o r g I S S N : 2 4 5 6 - 5 6 2 8 Page 6
V.CONCLUSION
At present, instruments or devices to rescue the
child who stuck in the bore well is not moreover
available in the fire stations because of lack of
efficiency and possible of failures in existing
instruments. So we designed a robot which is of
high efficiency in rescuing the robot and there is no
possibility of failures while rescuing. Also it is cost
efficient so that the needed persons could afford it
easily. The controlling is very easy and done by the
operated by lively monitoring through the camera.
Through this we can safeguard the child without any
possibilities of failure and injury.
REFERENCES
[1] Manish Raj, P.Chakraborty and G.C.Nandi
“Rescue robotics in bore well Environment”
Cornell university library [v1] GMT (244kb).
[2] O. Tatar, D. Mandru, “Design of in-pipe
modular robotic systems”, Vol.147-149, pp. 49-
54, 2009.
[3] J. Casper and R. R. Murphy, “Human-robot
interactions during the robot assisted urban
search and rescue response at the world trade
center,” IEEE Trans. Syst., Man, Cybern. B,
Cybern., Vol. 33, no. 3, pp. 367–385, Jun. 2003.](https://image.slidesharecdn.com/03040106-180813120114/85/BOREWELL-RESCUE-ROBOT-6-320.jpg)
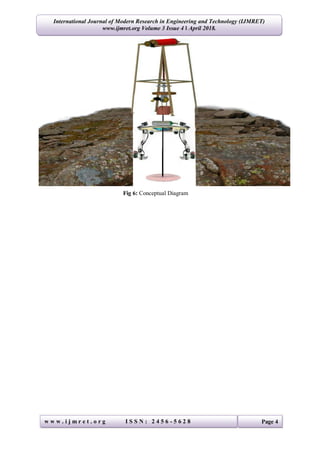
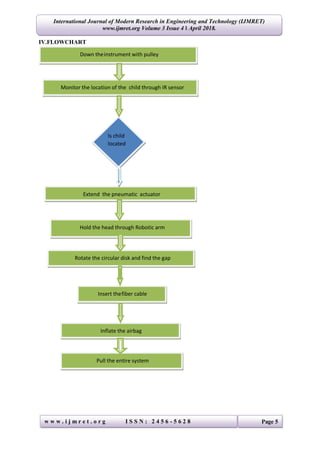
The document describes a proposed borewell rescue robot designed to safely rescue children who have fallen into borewells. The robot uses a circular disc, robotic arm, airbag, IR sensor, CCTV camera, pneumatic valve and servo motors to locate and secure the child without injury. It is lowered into the borewell using a pulley system. The IR sensor and camera help locate the child, then the robotic arm holds the child's head while the airbag is inflated under the child to prevent further falling. The whole system can then be pulled back up rescuing the child safely and effectively in a cost-efficient manner. The robot aims to provide a reliable rescue method without failures or risk of harm to the child.


















































































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)


