Over the lastfew decades, the growing number of natural
disasters and it is severity has been a serious test for all
communities and governments worldwide. Natural calamities
in the form of earthquakes and man-made ones such as
industrial accidents or building collapse have shaken
people's lives, shattered infrastructure, and imperilled public
security. These calamities always have devastating impacts
and leave people vulnerable and thus need an immediate
response to minimize casualties and restore normalcy.
4.
The most importantactivities in disaster response efforts are
search and rescue operations. PIR passive-infrared sensor is
a type of technology that detects infrared radiation, which
consists of formless lights. In effect, it works based on emitting
infrared and sensing its reflection from objects. Society is
being rapidly transformed because of this very technology-
such as increasing security via motion sensing alarms, life
made much easier via touchless devices, or advancing
healthcare with least invasive temperature checks-or driving
automation in numerous realms. The role of PIR sensors in a
"remote-controlled casualties finder robot" prototype is key.
5.
The inclusion ofPIR sensors makes the
robot identify a human presence by body heat
and then can use the same information to
perform autonomous search and rescue
operations. It is one application illustrating how
PIR sensor technology might fill critical needs
in society with the potential to save
lives.thusneed an immediate response to
minimize casualties and restore normalcy.
The Remote-Controlled CasualtiesFinder Robot aims to
enhance search and rescue missions in disaster-hit regions.
Fitted with a PIR infrared sensor and an observation camera, it
remotely searches for human motion, minimizing threats to
rescue parties. The PIR sensor automatically detects movement
by detecting changes in infrared energy, prompting the camera to
take real-time photos or videos. This enables the rescuers to
evaluate the scene from a distance and identify survivors more
effectively. The system supports rescue missions by minimizing
search time, improving precision, and lowering human exposure
to dangerous environments, ultimately facilitating life-saving
efforts.
8.
OBJECTIVES
The project developersintend to develop a remote-controlled human
finder. Specifically, the prototype should be able to perform the following.
• The prototype will be able to move using an app controller through a cell
phone.
• The prototype will detect casualties using PIR sensors.
• The prototype will show visuals using a wireless camera That connected to
the phone.
• The prototype will be able to move to uneven ground.
The prototype isdesigned to locate and potentially rescue
individuals trapped in hazardous environments, such as
collapsed buildings, or space that rescuers can't go easily. Its
primary function is to navigate difficult terrain, detect motion via
PIR sensor, and transmit real time visuals to rescue teams using
a camera that is connected to a cellphone that will show the
terrain to navigate effectively and show the casualties condition.
The prototype is equipped with wheels that can pass through
semi rough terrain, PIR sensor to help easily locate and identify
potential victims, and the buzzers that will act as a signal if the
sensor detect a human or animals.
11.
The project developerswill not focus on the prototype and will
not add additional features that are unnecessary for the main
purpose of the prototype. The prototype can navigate complex
environments, its ability to traverse extremely rugged terrain or
overcome significant obstacles may be limited. The prototype
communication range and signal strength can be affected by
environmental conditions, potentially limiting its effectiveness in
certain situations. Additionally, the prototype design and
capabilities are primarily focused on search and rescue
operations and may not be suitable for other applications, such
as medical assistance or surveillance
FOREIGN REVIEW RELATEDLITERATURE
As per Zong run Tang et al. (2024), the performance of
an infrared (IR) sensor is determined by a number of
factors, such as temperature, sensor-target distance, and
electromagnetic interference. Accuracy is affected by
distance since infrared energy is attenuated while traveling
through the atmosphere. IR sensors can make remote-
controlled human-finding robots more effective by sensing
the variation in infrared radiation from the human body,
allowing the robot to find victims even in dark or low-light
conditions.
14.
FOREIGN REVIEW RELATEDLITERATURE
Fahed Awad (2014) discovered that infrared
sensors can detect humans with great accuracy
in obstructed settings, providing both cost
savings and efficiency. Detection rates varied
from 79% to 91%, depending on body
orientation, atmospheric lighting, and color
contrast between the subject and the
background.
15.
LOCAL REVIEW RELATEDLITERATURE
Harold Patricia A. (2024) says that Android
flexibility extends beyond the normal smartphone
application, allowing for automation and control
of embedded systems. It is commonly used
alongside Arduino microcontrollers for purposes
of home automation, utilizing communication
protocols such as the internet, Wi-Fi, infrared,
and Bluetooth.
16.
LOCAL REVIEW RELATEDLITERATURE
Melvin Matulac (2021) noted the necessity to popularize
robotics education in the Philippines with accessible kits and
sensors at reasonable costs. He pointed out that the
equipment aids in developing the ability of students to think
critically and solve problems using math, programming, and
engineering principles. Matulac further advocated robotics
competitions, such as the Philippine Robotics Olympiad, to
stimulate innovation and creativity among young people
utilizing low-cost technology.
17.
FOREIGN REVIEW RELATEDSTUDIES
The research by Souvik Paul et al. (2020) provides important
insights on how a human-detection robot prototype can be
designed utilizing an Arduino microcontroller, Android interface,
and Bluetooth module for remote control and real-time feedback.
The system utilizes mobile sensors to monitor motion and
highlights the role of wireless communication in robotics. In the
meantime, Rose Anne C. Buella and Joan O. Bayani (2019)
underscore the necessity of a remote control system for electric
cars, emphasizing correct navigation for search-and-rescue
missions. Both reports underscore developing a sturdy, efficient,
and easy-to-operate robot that can navigate hard environments.
18.
LOCAL REVIEW RELATEDSTUDIES
Judie C. Samson, Jericho I. Lucibar, Patricia O.
Galvez, and Michelle Perez (2024) have created an
independent remote-controlled robotic vehicle with a
microprocessor and sensors to lessen human interaction
and minimize dangerous environments. With PIR or
ultrasonic sensors as well as leak-detection sensors and
temperature sensors, the device can effectively monitor
humans. Even its real-time temperature, position, and
picture feedback is rich in information needed for
operations.
CHAPTER 3
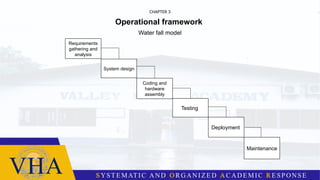
Operational framework
Waterfall model
Requirements
gathering and
analysis
System design
Coding and
hardware
assembly
Testing
Deployment
Maintenance
22.
An Operational Frameworkshowing the
Development of Remote-Controlled Casualties Finder Robot
The project follows the Waterfall model, a linear approach
with distinct phases: Requirements Gathering, System Design,
Coding and Hardware Assembly, Testing, Deployment, and
Maintenance. It starts with defining goals, followed by design
and implementation, then testing for functionality. While
effective for structured projects, the model’s rigidity may limit
adaptability, especially in complex projects where unforeseen
challenges could require significant rework.
23.
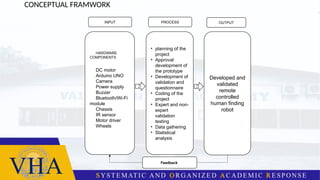
CONCEPTUAL FRAMWORK
PROCESS
INPUT OUTPUT
C
Developedand
validated
remote
controlled
human finding
robot
C
HARDWARE
COMPONENTS
DC motor
Arduino UNO
Camera
Power supply
Buzzer
Bluetooth/Wi-Fi
module
Chassis
IR sensor
Motor driver
Wheels
• planning of the
project
• Approval
development of
the prototype
• Development of
validation and
questionnaire
• Coding of the
project
• Expert and non-
expert
validation
testing
• Data gathering
• Statistical
analysis
Feedback
24.
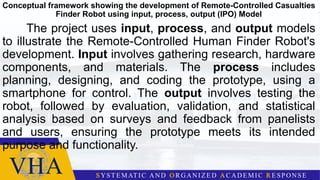
Conceptual framework showingthe development of Remote-Controlled Casualties
Finder Robot using input, process, output (IPO) Model
The project uses input, process, and output models
to illustrate the Remote-Controlled Human Finder Robot's
development. Input involves gathering research, hardware
components, and materials. The process includes
planning, designing, and coding the prototype, using a
smartphone for control. The output involves testing the
robot, followed by evaluation, validation, and statistical
analysis based on surveys and feedback from panelists
and users, ensuring the prototype meets its intended
purpose and functionality.
RESEARCH DESIGN
This studyuses an experimental research design to
evaluate the project's effectiveness, efficiency, and
reliability in emergency scenarios. Conducted in Barangay
San Rafael, the research involved firefighters and Red
Cross personnel, selected through purposive sampling to
ensure expertise in emergency response. Controlled
testing and data collection provided objective and
measurable findings to enhance disaster management
operations.
27.
SETTING OF THESTUDY
The research was done in Barangay Geronimo, Rodriguez,
Rizal, which is 6.7 km away from Rodriguez Municipal Hall. The
major landmarks along the way are Mercury Drug, Xentro Mall,
Valley High Academy, and Jeafer Gas Station. Barangay
Geronimo has a population of 6,764 as of the 2020 Census and is
continuously increasing. The respondents were motorists and
small-scale fuel resellers, who depend on gasoline for
transportation and business. The barangay is reachable by
jeepney or motorcycle and takes about 15 minutes of travel time
from the municipal hall.
28.
SUBJECT OF THESTUDY
The project developers developed a remote-controlled
casualties finder robot that aims to enhance rescue efforts in
disaster scenarios such as earthquakes. This research is
particularly beneficial to rescue teams, including firefighters, and
disaster response units, by providing them with a technological
tool that improves the speed and efficiency of locating trapped
individuals. The victims of such disasters stand to gain the
greatest benefit, as the robot’s ability to detect casualties
presence in hazardous environments significantly increases
survival or rescued chances. By reducing response time and
minimizing risks for casualties rescuers.
29.
RESPONDENTS OF THESTUDY
The study involved IT experts selected for their
expertise in robotics and remote-controlled
systems. Their feedback was crucial in assessing
the accuracy, maneuverability, usability, and overall
performance of the human finder robot in
emergency scenarios. Their evaluations provided
valuable insights for potential improvements.
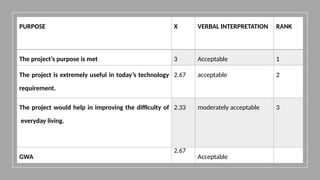
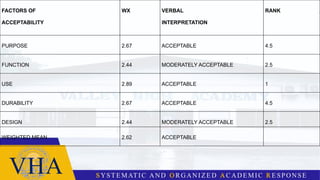
PURPOSE X VERBALINTERPRETATION RANK
The project’s purpose is met 3 Acceptable 1
The project is extremely useful in today’s technology
requirement.
2.67 acceptable 2
The project would help in improving the difficulty of
everyday living.
2.33 moderately acceptable 3
GWA
2.67
Acceptable
32.
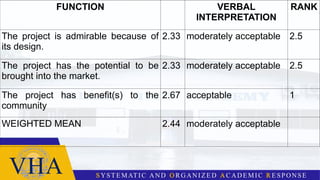
FUNCTION VERBAL
INTERPRETATION
RANK
The projectis admirable because of
its design.
2.33 moderately acceptable 2.5
The project has the potential to be
brought into the market.
2.33 moderately acceptable 2.5
The project has benefit(s) to the
community
2.67 acceptable 1
WEIGHTED MEAN 2.44 moderately acceptable
33.
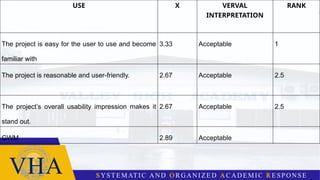
USE X VERVAL
INTERPRETATION
RANK
Theproject is easy for the user to use and become
familiar with
3.33 Acceptable 1
The project is reasonable and user-friendly. 2.67 Acceptable 2.5
The project’s overall usability impression makes it
stand out.
2.67 Acceptable 2.5
GWM 2.89 Acceptable
34.
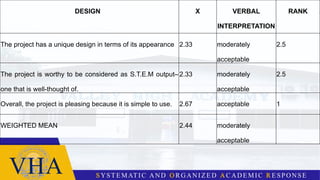
DESIGN X VERBAL
INTERPRETATION
RANK
Theproject has a unique design in terms of its appearance 2.33 moderately
acceptable
2.5
The project is worthy to be considered as S.T.E.M output–
one that is well-thought of.
2.33 moderately
acceptable
2.5
Overall, the project is pleasing because it is simple to use. 2.67 acceptable 1
WEIGHTED MEAN 2.44 moderately
acceptable
35.
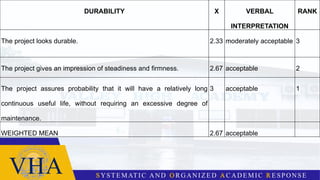
DURABILITY X VERBAL
INTERPRETATION
RANK
Theproject looks durable. 2.33 moderately acceptable 3
The project gives an impression of steadiness and firmness. 2.67 acceptable 2
The project assures probability that it will have a relatively long
continuous useful life, without requiring an excessive degree of
maintenance.
3 acceptable 1
WEIGHTED MEAN 2.67 acceptable
Conclusion
The Remote-Controlled CasualtiesFinder Robot successfully
demonstrates usability and fulfills its intended purpose, offering a
functional solution for detecting casualties in various
environments. While it aligns with modern technological
advancements, improvements in sensor accuracy, response time,
and mobility could enhance its effectiveness. Integrating advanced
sensors like PIR, ultrasonic, or infrared cameras would improve
detection in low-visibility areas. Usability was the prototype’s
strongest aspect, with experts praising its user-friendly interface
and
39.
simple controls, thoughfuture upgrades such as real-time feedback and
voice command integration could further enhance efficiency. Functionality
was rated moderately acceptable, highlighting the need for optimized
detection, increased response speed, and better maneuverability. Market
readiness also requires development, with enhancements in hardware
reliability and cost-efficiency needed for large-scale implementation. The
design received a moderately acceptable rating, with suggestions for a
more compact, lightweight, and weatherproof structure to improve
durability in extreme conditions. Strengthening materials, optimizing
battery life, and enhancing component integration could extend the
prototype’s longevity and performance. Overall, the project is a promising
tool for casualty detection, and with further refinements, it has the potential
to become a highly effective device for search-and-rescue operations.
40.
Strengthening materials, optimizingbattery life, and enhancing component
integration could extend the prototype’s longevity and performance. Overall,
the project is a promising tool for casualty detection, and with further
refinements, it has the potential to become a highly effective device for
search-and-rescue operations.
41.
Recomendation
The project developersrecommend that STEM students use this
study as a foundation for further research and prototype
development by integrating additional microprocessors and
devices. STEM teachers should enhance their teaching methods
on microcontrollers like ESP32 and programming languages
relevant to project development, while also incorporating various
sensors and devices into their curriculum. IT instructors may
improve their approach to teaching microcontrollers like Arduino,
focusing on programming languages and seeking expert validation
for project evaluation.
42.
Rescuers and emergencyresponders can explore
adopting and refining this technology for search-and-
rescue operations, collaborating with engineers to
optimize it for disaster response scenarios. Future project
developers may enhance the project by integrating
advanced microprocessors and using this study as a
reference for related research, ultimately creating a more
effective and impactful solution for real-world applications.
43.
Implementation
The implementation planfor the Remote-Controlled
Casualties Finder Robot follows a structured timeline. It begins
with planning, where developers define the scope, allocate
resources, and identify required technologies. During manuscript
development, the design, prototype process, and testing are
documented. In December, schematics are created, and
necessary components are procured. January and February focus
on coding movement, sensing, and data processing algorithms
while assembling hardware and software. Testing occurs from
January to March to refine functionality. Core components are
integrated in February and March, followed by final assembly and
system
44.
integration in March.A final prototype test ensures
performance validation, with results analyzed for
improvements. April is dedicated to finalizing
documentation and conducting the final defense, marking
the project's completion.