Download to read offline
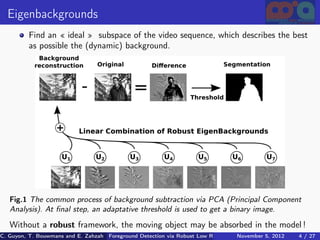
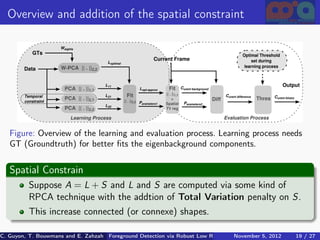
![Various RPCA formulation (only for α = 1)
PCA with fixed rank is : min ||S||F
L,S
s.t. Rank(L) = k (7)
A=L+S
R(obust)PCA is (Non convex and NP-hard ) :
min ||σ(L)||0 + λ||S||0
L,S (8)
s.t. A=L+S
Convex relaxed problem of (2) is RPCA-PCP proposed by Candès et al. [1] :
min ||σ(L)||1 + λ||S||1
L,S (9)
s.t. A=L+S
Where σ(L) means singular values of L.
A mix is Stable PCP of Zhou et al. [2] (both entry-wise and sparse noise) :
min ||σ(L)||1 + λ||S||1
L,S (10)
s.t. ||A − L − S||F < δ
All of them could be solved by Augmented Lagrangian Multipliers (ALM).
C. Guyon, T. Bouwmans and E. Zahzah Foreground Detection via Robust Low Rank Matrix Decomposition including spati
(MIA Laboratory (Mathematics Images & Applications), 5, 2012
November University of 10 / 27
La Roche](https://image.slidesharecdn.com/bmc2012-121119005431-phpapp02/85/BMC-2012-10-320.jpg)
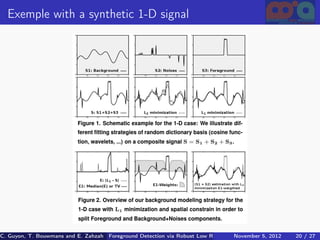
![Experimental Protocol
Optimal threshold is chosen for maximizing F-measure criterion
which is based 2 × 2 histogram of True/false/positive/negative :
TP TP 2 DR Prec
DR = , Prec = , F =
TP + FN TP + F P DR + Prec
Good performance is then obtained when the F-measure is closed to 1
Time consumption is not take into account in the evaluation process.
RPCA-LBD is compared with the following two Robust methods :
Robust Subspace Learning (RSL) De La Torre et al. [4]
Principal Component Pursuit (RPCA-PCP) [1]
C. Guyon, T. Bouwmans and E. Zahzah Foreground Detection via Robust Low Rank Matrix Decomposition including spati
(MIA Laboratory (Mathematics Images & Applications), 5, 2012
November University of 22 / 27
La Roche](https://image.slidesharecdn.com/bmc2012-121119005431-phpapp02/85/BMC-2012-22-320.jpg)
![Future Works & References
Future Works
Lack in computation time : Further research consists in developping an
incremental version to update the model at every frame and to achieve
the real-time requirements.
References
[1] E. Candes, X. Li, Y. Ma, and J. Wright, Robust principal component
analysis, International Journal of ACM, vol. 58, no. 3, May 2011.
[2] Z. Zhou, X. Li, J. Wright, E. Candes, and Y. Ma, Stable principal
component pursuit,IEEE ISIT Proceedings, pp. 1518-1522, Jun. 2010.
[3] G. Tang and A. Nehorai, Robust principal component analysis based
on low-rank and block-sparse matrix decomposition, CISS 2011, 2011.
C. Guyon, T. Bouwmans and E. Zahzah Foreground Detection via Robust Low Rank Matrix Decomposition including spati
(MIA Laboratory (Mathematics Images & Applications), 5, 2012
November University of 27 / 27
La Roche](https://image.slidesharecdn.com/bmc2012-121119005431-phpapp02/85/BMC-2012-27-320.jpg)

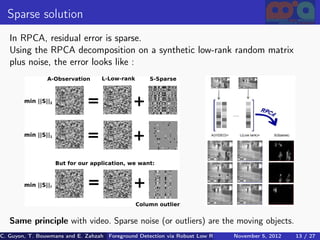
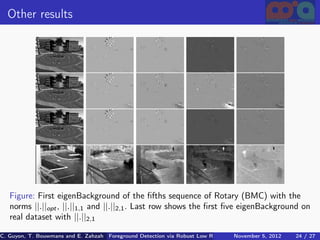
The document discusses foreground detection through robust low-rank matrix decomposition combined with spatio-temporal constraints, focusing on its application in video surveillance and motion capture. It elaborates on the techniques used, including iterative reweighted least squares (IRLS) and different formulations for robust PCA, supplemented with experimental results validating the method's effectiveness. Key challenges and future works, such as the need for real-time processing improvements, are also addressed.