1. The document presents Plug-and-Play priors for Bayesian imaging using Langevin-based sampling methods.
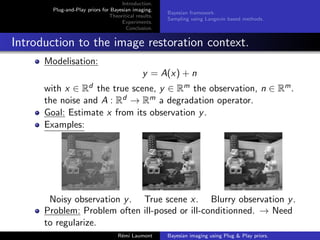
2. It introduces the Bayesian framework for image restoration and discusses challenges in modeling the prior.
3. A Plug-and-Play approach is proposed that uses an implicit prior defined by a denoising network in conjunction with Langevin sampling, termed PnP-ULA. Experiments demonstrate its effectiveness on image deblurring and inpainting tasks.


![Introduction.
Plug-and-Play priors for Bayesian imaging.
Theoritical results.
Experiments.
Conclusion.
Bayesian framework.
Sampling using Langevin based methods.
Bayesian paradigm.
Bayesian formulation:
p(y|x) ∝ p(x)p(y|x)
where p(x) the prior and p(y|x) is the likelihood (assumed to
be known).
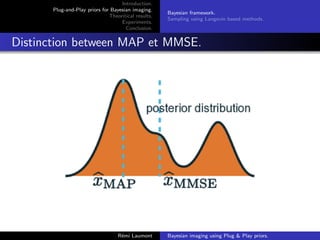
Maximum-A-Posteriori estimator:
x̂MAP =arg max
x∈Rd
p(x|y)=arg min
x∈Rd
{F(x, y) + λR(x)} (1)
where R(x) = − log p(x) and F(x, y) = − log p(y|x).
Minimum Mean Square Error (MMSE) estimator:
x̂MMSE =arg min
u∈Rd
E[kx − uk2
|y] =E[x|y] (2)
Rémi Laumont Bayesian imaging using Plug & Play priors.](https://image.slidesharecdn.com/gtti10032021-210310143356/85/Gtti-10032021-4-320.jpg)

![Introduction.
Plug-and-Play priors for Bayesian imaging.
Theoritical results.
Experiments.
Conclusion.
Bayesian framework.
Sampling using Langevin based methods.
Role of the discretization step-size δ.
δ controls the trade-off between the convergence speed and
the acuracy of the Markov chain.
1-D example:
π(x) ∝ exp [−x2
/(2σ2
)] with σ = 1.
We sample from πδ ∝ exp [−x2
/(2σ2
δ)] with
σ2
δ = σ2
/(2 − δ/σ2
).
Rémi Laumont Bayesian imaging using Plug & Play priors.](https://image.slidesharecdn.com/gtti10032021-210310143356/85/Gtti-10032021-8-320.jpg)
![Introduction.
Plug-and-Play priors for Bayesian imaging.
Theoritical results.
Experiments.
Conclusion.
Bayesian framework.
Sampling using Langevin based methods.
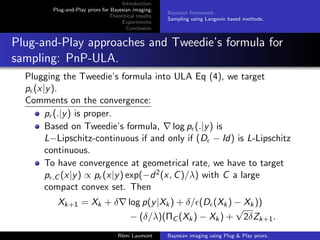
Plug-and-Play approaches.
Targetting p(x|y), Eq (4) becomes
Xk+1 = Xk + δ∇ log p(Xk) + δ∇ log p(y|Xk) +
√
2δZk+1. (5)
Problem: p(x) is unknown and difficult to model. → Implicit prior
such as neural networks to target ∇R e.g (Alain and Bengio,
2014), (Guo et al., 2019),(Romano et al., 2017) and
(Kadkhodaie and Simoncelli, 2021) based on the Tweedie’s
formula :
E[X|X + N = x̃] − x̃ = ∇ log(p ∗ g)(x̃) = ∇ log(p)(x̃), (6)
with X ∼ p, N ∼ N(0, Id) and g a Gaussian kernel (Efron, 2011).
But,
E[X|X + N = x̃] ' D(x̃),
with D a denoiser.
Rémi Laumont Bayesian imaging using Plug Play priors.](https://image.slidesharecdn.com/gtti10032021-210310143356/85/Gtti-10032021-9-320.jpg)

![Introduction.
Plug-and-Play priors for Bayesian imaging.
Theoritical results.
Experiments.
Conclusion.
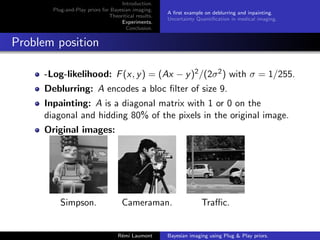
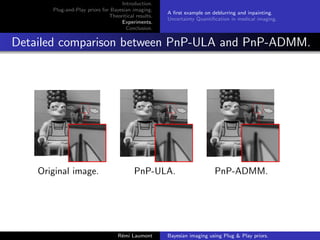
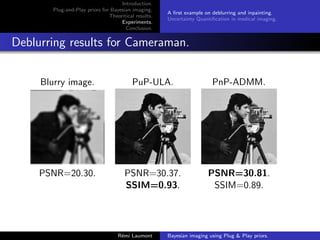
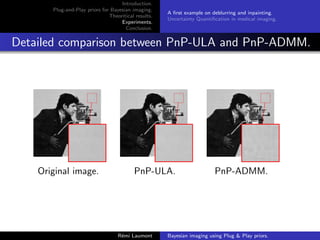
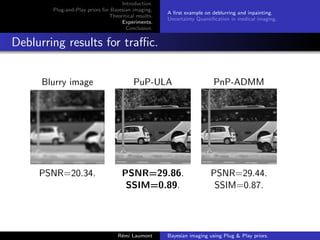
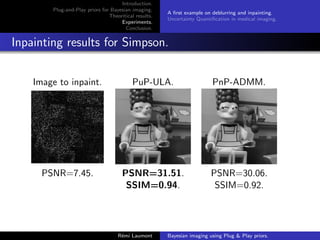
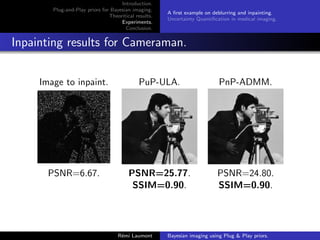
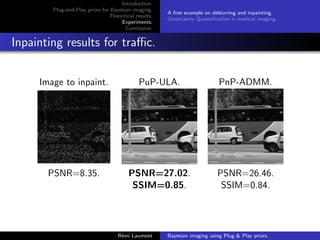
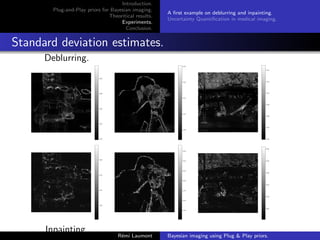
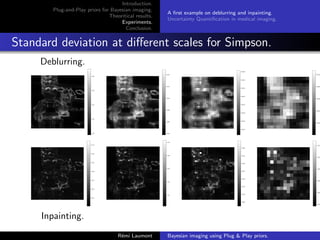
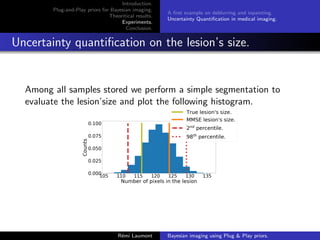
A first example on deblurring and inpainting.
Uncertainty Quantification in medical imaging.
Algorithm parameters
D provided by (Ryu et al., 2019) and such that (D − Id) is
L-Lipschitz with L 1. = (5/255)2.
Comparison with PnP-ADMM with deblurring = (5/255)2 and
inpainting = (40/255)2.
C = [−1, 2]d .
A thinned version of the Markov chain is considered made of
samples stored every 2500 iterations.
n nburn−in δ Initialization
PnP-ULA 2.5e7 2.5e6 3δmax y
Rémi Laumont Bayesian imaging using Plug Play priors.](https://image.slidesharecdn.com/gtti10032021-210310143356/85/Gtti-10032021-14-320.jpg)
![References
Aguerrebere, Cecilia, Andres Almansa, Julie Delon, Yann Gousseau, and Pablo Muse
(2017). “A Bayesian Hyperprior Approach for Joint Image Denoising and
Interpolation, With an Application to HDR Imaging”. In: IEEE Transactions on
Computational Imaging 3.4, pp. 633–646. issn: 2333-9403. doi:
10.1109/TCI.2017.2704439. arXiv: 1706.03261 (cit. on p. 6).
Alain, Guillaume and Yoshua Bengio (2014). “What Regularized Auto-Encoders Learn
from the Data-Generating Distribution”. In: Journal of Machine Learning Research
15, pp. 3743–3773. issn: 1532-4435. arXiv: 1211.4246 (cit. on p. 9).
Bortoli, Valentin De and Alain Durmus (2020). Convergence of diffusions and their
discretizations: from continuous to discrete processes and back. arXiv: 1904.09808
[math.PR] (cit. on p. 7).
Durmus, Alain, Eric Moulines, and Marcelo Pereyra (2018). “Efficient bayesian
computation by proximal markov chain monte carlo: when langevin meets moreau”.
In: SIAM Journal on Imaging Sciences 11.1, pp. 473–506 (cit. on p. 6).
Efron, Bradley (2011). “Tweedie’s Formula and Selection Bias”. In: Journal of the
American Statistical Association 106.496, pp. 1602–1614. issn: 0162-1459. doi:
10.1198/jasa.2011.tm11181 (cit. on p. 9).
Guo, Bichuan, Yuxing Han, and Jiangtao Wen (2019). “AGEM : Solving Linear
Inverse Problems via Deep Priors and Sampling”. In: (NeurIPS) Advances in Neural
Rémi Laumont Bayesian imaging using Plug Play priors.](https://image.slidesharecdn.com/gtti10032021-210310143356/85/Gtti-10032021-35-320.jpg)
![References
Information Processing Systems. Ed. by Curran Associates Inc., pp. 545–556
(cit. on p. 9).
“Introduction to Markov Random Fields” (2011). In: Markov Random Fields for Vision
and Image Processing. The MIT Press. doi: 10.7551/mitpress/8579.003.0001
(cit. on p. 6).
Kadkhodaie, Zahra and Eero P. Simoncelli (2021). Solving Linear Inverse Problems
Using the Prior Implicit in a Denoiser. arXiv: 2007.13640 [cs.CV] (cit. on p. 9).
Louchet, Cécile and Lionel Moisan (2013). “Posterior expectation of the total variation
model: Properties and experiments”. In: SIAM Journal on Imaging Sciences 6.4,
pp. 2640–2684. issn: 19364954. doi: 10.1137/120902276 (cit. on p. 6).
Pereyra, Marcelo, Luis Vargas Mieles, and Konstantinos C. Zygalakis (2020).
“Accelerating proximal Markov chain Monte Carlo by using an explicit stabilized
method”. In: SIAM J. Imaging Sci. 13.2, pp. 905–935. doi: 10.1137/19M1283719
(cit. on p. 33).
Roberts, Gareth O, Richard L Tweedie, et al. (1996). “Exponential convergence of
Langevin distributions and their discrete approximations”. In: Bernoulli 2.4,
pp. 341–363 (cit. on p. 7).
Romano, Yaniv, Michael Elad, and Peyman Milanfar (2017). “The Little Engine That
Could: Regularization by Denoising (RED)”. In: SIAM Journal on Imaging Sciences
Rémi Laumont Bayesian imaging using Plug Play priors.](https://image.slidesharecdn.com/gtti10032021-210310143356/85/Gtti-10032021-36-320.jpg)































































![Polymer [ बहुलक ] Chemistry Notes PDF - Irfanullah Mehar - JJ Sir Chemistry.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/polymerchemistrynotespdf-irfanullahmehar-jjsirchemistry-260210172118-3f9b37f7-thumbnail.jpg?width=640&height=640&fit=bounds)


