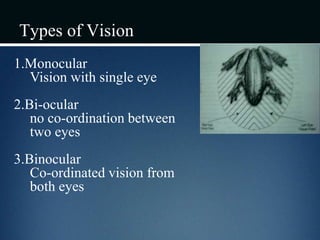
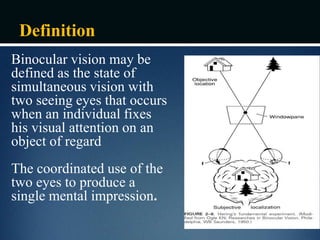
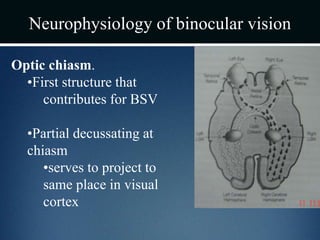
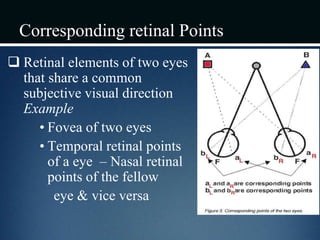
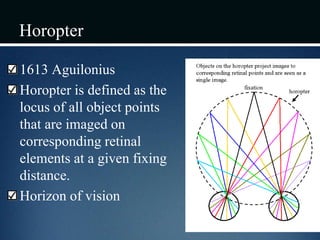
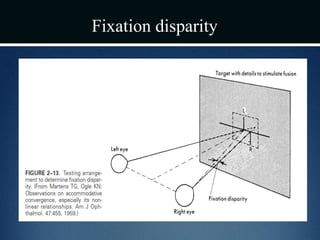
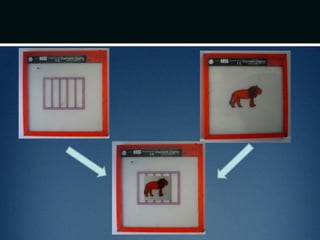
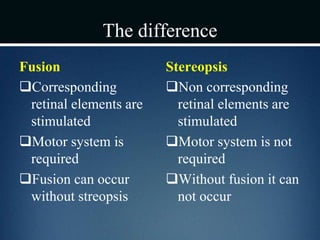
This document discusses binocular single vision (BSV) and its components. It defines BSV as the coordinated use of the two eyes to produce a single mental impression. The key requirements for developing BSV are a motor mechanism to align the eyes, sensory mechanisms for equal retinal images, and mental processing in the visual cortex. BSV involves corresponding retinal points, the horopter locus, and Panum's fusional area which allows fusion of objects slightly off the horopter. The document also describes the grades of binocular vision as simultaneous perception, fusion, and stereopsis.