The document discusses Bayesian Hilbert Maps (BHMs) for dynamic continuous occupancy mapping, focusing on building long-term occupancy maps in real-time for large and dynamic environments. BHMs offer advantages such as continuous mapping capabilities, better accuracy due to spatial dependencies, and rapid updates without the need for complex tuning or underlying motion models. The paper includes methodologies, experimental results, and comparisons to other mapping techniques, emphasizing the efficiency and effectiveness of BHMs.
![Occupancy mapping
● Occupancy grid map [1]
○ Fixed size grid (predetermined)](https://image.slidesharecdn.com/ransalucorl17-180330110147/85/Bayesian-Hilbert-Maps-for-Dynamic-Continuous-Occupancy-Mapping-4-320.jpg)
![Occupancy mapping
● Occupancy grid map [1]
○ Fixed size grid (predetermined)](https://image.slidesharecdn.com/ransalucorl17-180330110147/85/Bayesian-Hilbert-Maps-for-Dynamic-Continuous-Occupancy-Mapping-5-320.jpg)
![Occupancy mapping
● Occupancy grid map [1]
○ Fixed size grid (predetermined)
○ Assume cells are independent
○ Occlusions
●
●](https://image.slidesharecdn.com/ransalucorl17-180330110147/85/Bayesian-Hilbert-Maps-for-Dynamic-Continuous-Occupancy-Mapping-6-320.jpg)
![Continuous Occupancy mapping
Gaussian Process Occupancy Maps [2] and Hilbert Maps (HMs) [3]
The world is not pre-discretized
● Hence, any resolution
● Neighborhood information is considered
○ Hence, robust against occlusions](https://image.slidesharecdn.com/ransalucorl17-180330110147/85/Bayesian-Hilbert-Maps-for-Dynamic-Continuous-Occupancy-Mapping-7-320.jpg)


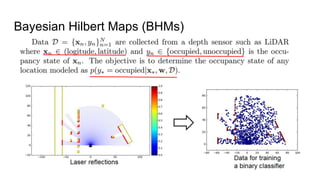
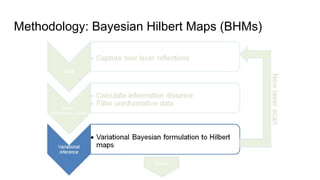


![Bayesian Hilbert Maps (BHMs)
[4]
Variational Inference](https://image.slidesharecdn.com/ransalucorl17-180330110147/85/Bayesian-Hilbert-Maps-for-Dynamic-Continuous-Occupancy-Mapping-17-320.jpg)
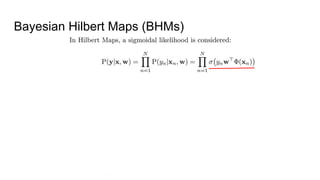
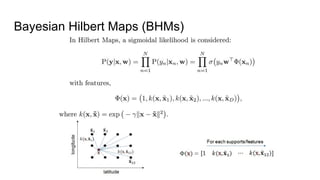
![Bayesian Hilbert Maps (BHMs)
A lower bound of the variational lower bound derived from linearizing the sigmoidal
likelihood is maximized in an Expectation-Maximization-fashion.
[4]](https://image.slidesharecdn.com/ransalucorl17-180330110147/85/Bayesian-Hilbert-Maps-for-Dynamic-Continuous-Occupancy-Mapping-18-320.jpg)



![Other Applications
[1] A. Elfes, “Occupancy grids: a probabilistic framework for robot perception and navigation”, PhD dissertation, CMU, 1987
[2] S.T. O’Callaghan, F. Ramos, and H. Durrant-Whyte, “Contextual occupancy maps using Gaussian processes”, ICRA, 2009
[3] F. Ramos and L. Ott, “Hilbert maps: scalable continuous occupancy mapping with stochastic gradient descent”, RSS, 2015
[4] T. Jaakkola and M. Jordan. A variational approach to bayesian logistic regression models 296 and their extensions. AISTATS, 1997.
[5] C. M. Bishop. Pattern recognition. Machine Learning, 128:1–58, 2006.
[6] S. O’Callaghan, S. Singh, A. Alempijevic, and F. Ramos, “Learning Navigational Maps by Observing Human Motion Patterns”, ICRA, 2011
[7] Z. Marinho, A. Dragan, A. Byravan, B. Boots, S. Srinivasa, and G. Gordon “Functional Gradient Motion Planning in Reproducing Kernel Hilbert
Spaces”, RSS, 2016
[8] G. Francis, L. Ott, and F. Ramos, “Stochastic Functional Gradient Path Planning in Occupancy Maps”, ICRA, 2017
References
[7] [8][6]](https://image.slidesharecdn.com/ransalucorl17-180330110147/85/Bayesian-Hilbert-Maps-for-Dynamic-Continuous-Occupancy-Mapping-23-320.jpg)