Downloaded 50 times

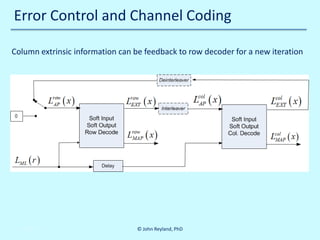
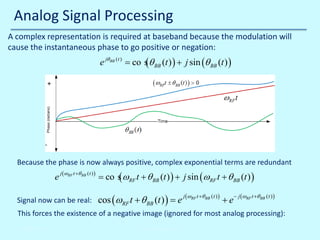
![Error Control and Channel Coding
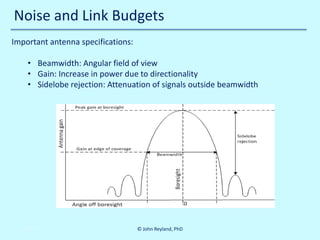
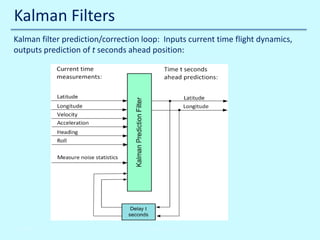
Time Diversity:
After receiver reassembles,
all errors can be corrected
See [R5] and [R6]
10/30/2013
© John Reyland, PhD](https://image.slidesharecdn.com/atispacecraftrfcommssampleslidesnovember2013-131030105841-phpapp02/85/Spacecraft-RF-Communications-Course-Sampler-11-320.jpg)
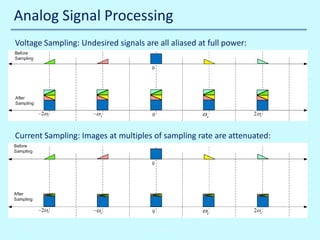
![Error Control and Channel Coding
Concatenated coding for Voyager mission to Saturn and Uranus
Power efficiency is extremely important: Coding gain of 6dB can double the
communications range between spacecraft and earth ([C8], page 172)
Voyager telecommunications achieved 10-6 BER at EbN0 = 2.53dB, 2Mbits/sec.
What system considerations are not very important?
Bandwidth efficiency, not many other users out there.
Delay, waiting time for image reconstructions is OK
10/30/2013
© John Reyland, PhD](https://image.slidesharecdn.com/atispacecraftrfcommssampleslidesnovember2013-131030105841-phpapp02/85/Spacecraft-RF-Communications-Course-Sampler-15-320.jpg)
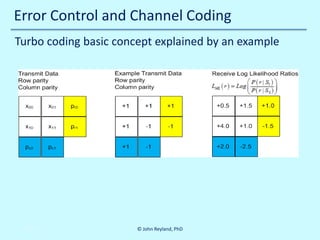
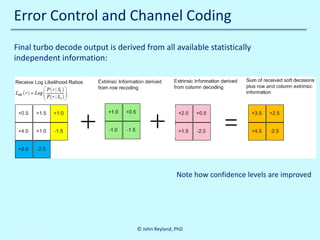
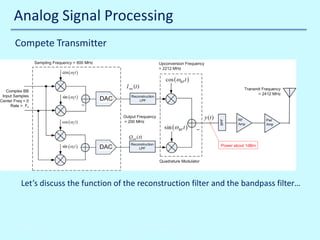
![Error Control and Channel Coding
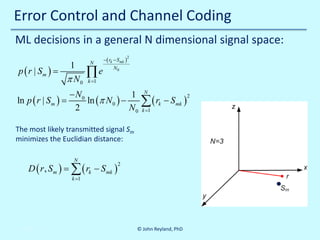
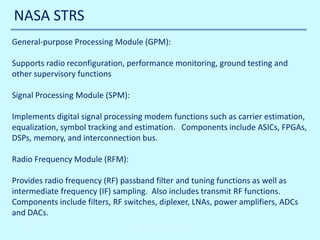
Log likelihood ratio of modulo two addition of two soft decisions (see []):
(
L ( r0 ⊕ r1 ) L ( r0= sig nL ( r0 ) ) sig nL ( r1 ) ) min L ( r0 ) , L ( r1 )
=
) L ( r1 )
(
(
)
This addition rule is used to combine data and parity into extrinsic information
Extrinsic means extra, or indirect, information derived from the decoding process
10/30/2013
© John Reyland, PhD](https://image.slidesharecdn.com/atispacecraftrfcommssampleslidesnovember2013-131030105841-phpapp02/85/Spacecraft-RF-Communications-Course-Sampler-18-320.jpg)
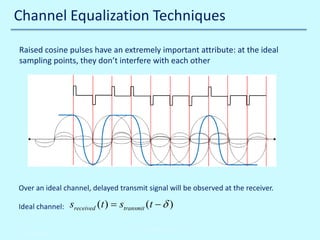
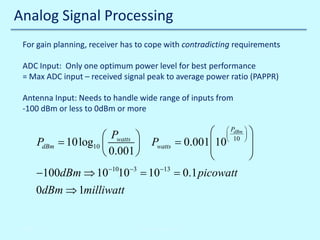
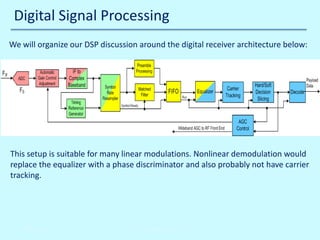
![Channel Equalization Techniques
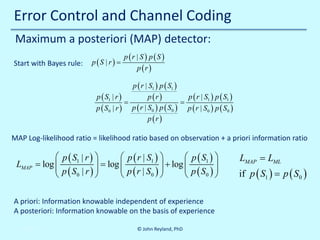
A decision feedback
nonlinear adaptive
equalizer:
See [E1] and [E2]
10/30/2013
© John Reyland, PhD](https://image.slidesharecdn.com/atispacecraftrfcommssampleslidesnovember2013-131030105841-phpapp02/85/Spacecraft-RF-Communications-Course-Sampler-24-320.jpg)
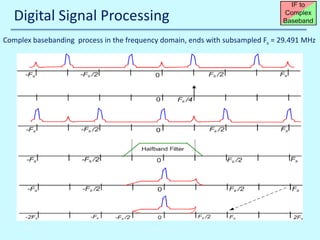
![Digital Signal Processing
Intermediate center frequency Fif = 44.2368 MHz.
Does this mean sampling frequency Fs > 88.4736 MHz ?
No, we can bandpass sample, by making Fs = (4/3) Fif = 58.9824 MHz. This has advantages:
• Lower sample rate => smaller sample buffers and fewer FPGA timing problems
• Fif can be higher for the same sample rate, this may make frequency planning easier
Disadvantage is that noise in the range [Fs/2 Fs] is folded back into [0 Fs/2]
10/30/2013
John Reyland, PhD](https://image.slidesharecdn.com/atispacecraftrfcommssampleslidesnovember2013-131030105841-phpapp02/85/Spacecraft-RF-Communications-Course-Sampler-30-320.jpg)
![Digital Signal Processing
Halfband Filter response
HalfBand filter Impulse Response, Order=11
0.6
0.4
Typical Matlab code:
0.2
0
-0.2
Fss = 58.9824e6;
1
2
3
4
5
6
7
8
9
10
11
Resp, dB
0
-10
-20
-30
-40
0
3.6864
7.3728
11.0592 14.7456 18.432
Frequency (MHz)
22.1184 25.8048 29.4912
0
3.6864
7.3728
11.0592 14.7456 18.432
Frequency (MHz)
22.1184 25.8048 29.4912
Resp, linear
1
0.5
0
10/30/2013
John Reyland, PhD
% Setup halfband filter for input subsampling
PassBandEdge = 1/2-1/8;
StopBandRipple = 0.1;
b=firhalfband('minorder', …
PassBandEdge, …
StopBandRipple, …
'kaiser');
% Check frequency response
[hb,wb] = freqz(b,1,2048);
plot(wb,10*log10(abs(hb)));
set(gca,'XLim',[0 pi]);
set(gca,'XTick',0:pi/8:pi);
set(gca,'XTickLabel',(0:(Fss/16):(Fss/2))/1e6);](https://image.slidesharecdn.com/atispacecraftrfcommssampleslidesnovember2013-131030105841-phpapp02/85/Spacecraft-RF-Communications-Course-Sampler-32-320.jpg)
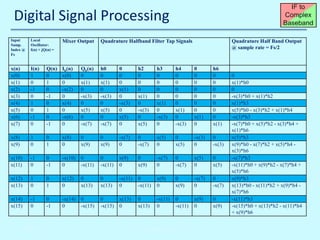
![Digital Signal Processing
DSP Circuits for IF to Complex BB process
Fs/4 Local Oscillator
Inphase Halfband Filter
I(n) + jQ(n) = [1+j0,0+j1,-1+j0,0-j1,1+j0, ...]
HI(z) = h0 + z-2h2 + z-3h3 + z-4h4 + z-6h6
Ib(n)
x(n)
Z-1
h0
Z-1
Z-1
Z-1
Z-1
Z-1
0
h2
h3
h4
0
h6
Ihb(n)
2
Qb(n)
Z-1
h0
Z-1
Z-1
Z-1
Z-1
Z-1
0
h2
h3
h4
0
h6
Qhb(n)
2
Quadrature Halfband Filter
HQ(z) = h0 + z-2h2 + z-3h3 + z-4h4 + z-6h6
10/30/2013
John Reyland, PhD](https://image.slidesharecdn.com/atispacecraftrfcommssampleslidesnovember2013-131030105841-phpapp02/85/Spacecraft-RF-Communications-Course-Sampler-33-320.jpg)

The document details a multi-day workshop on spacecraft RF communication, covering topics such as RF signal transmission, modulation techniques (like BPSK and QPSK), telemetry systems, and error control coding. It emphasizes the significance of channel coding for long-distance communication, using examples like the Voyager mission, and discusses various signal processing techniques. Key concepts include Doppler effects, time dilation, link budgets, and advanced decoding methods like turbo decoding.





























![Multiband Transceivers - [Chapter 1]](https://cdn.slidesharecdn.com/ss_thumbnails/ch1-150613070932-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![RF Module Design - [Chapter 1] From Basics to RF Transceivers](https://cdn.slidesharecdn.com/ss_thumbnails/rfch1-150613070344-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)





































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)

















