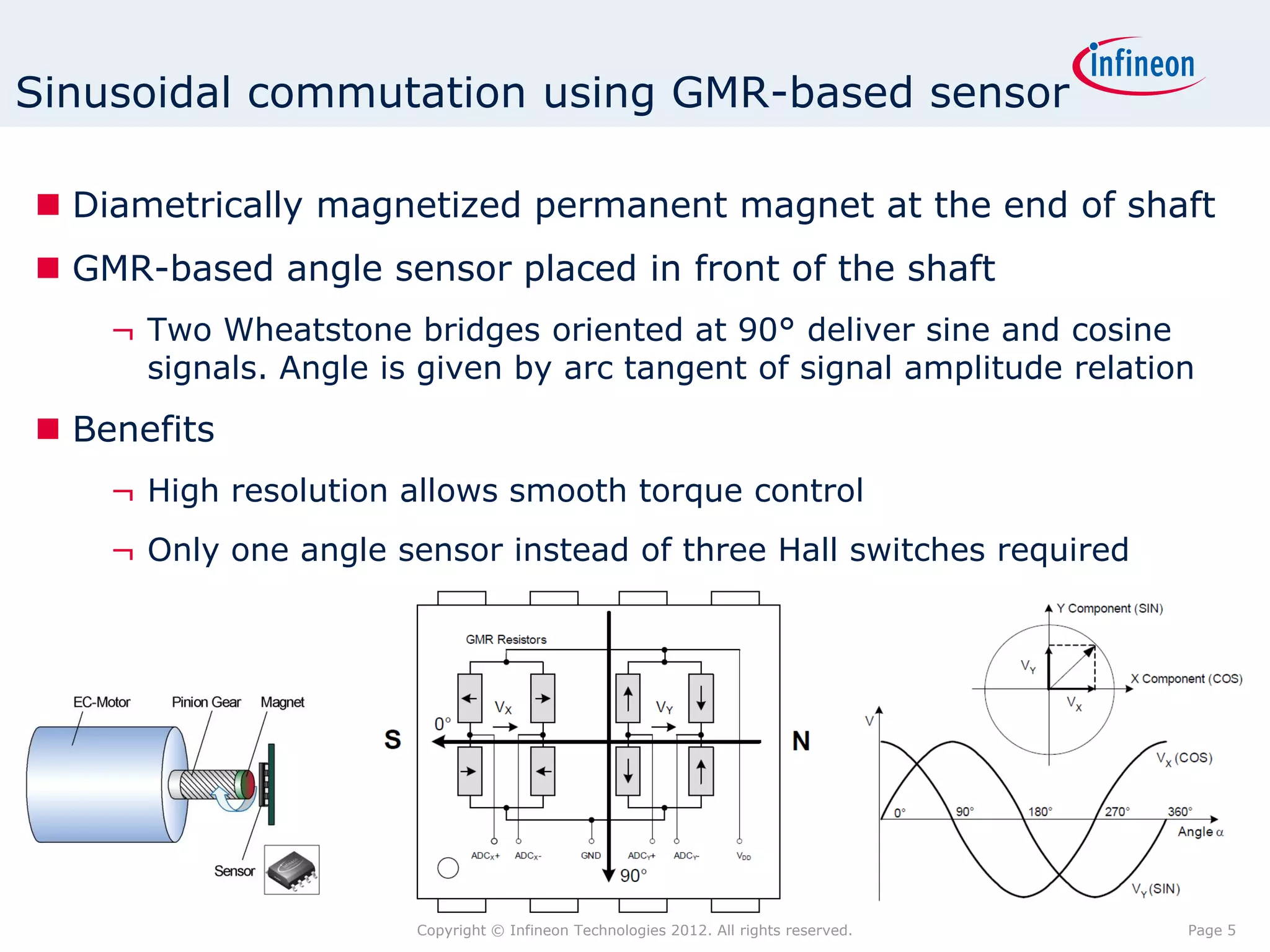
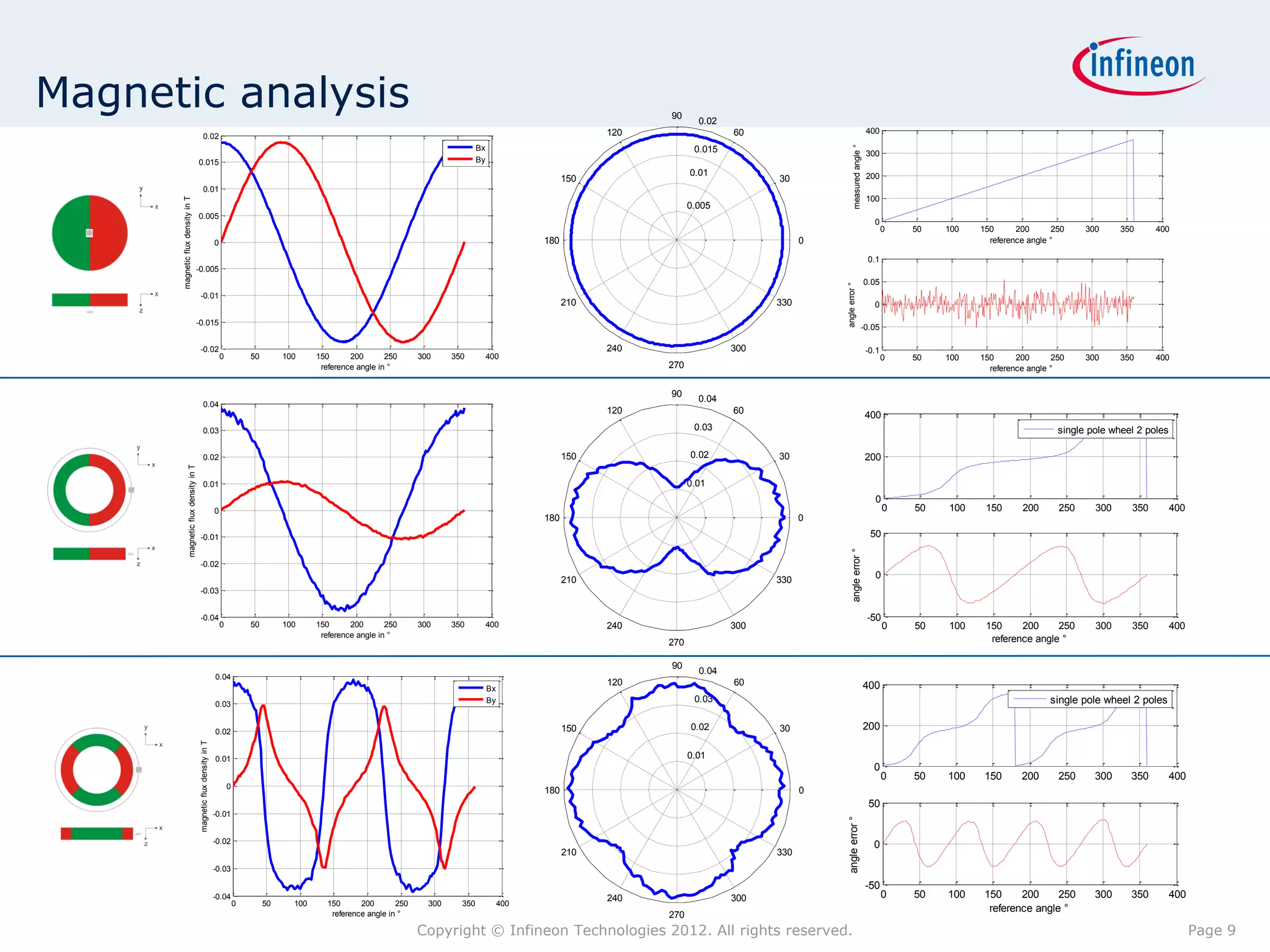
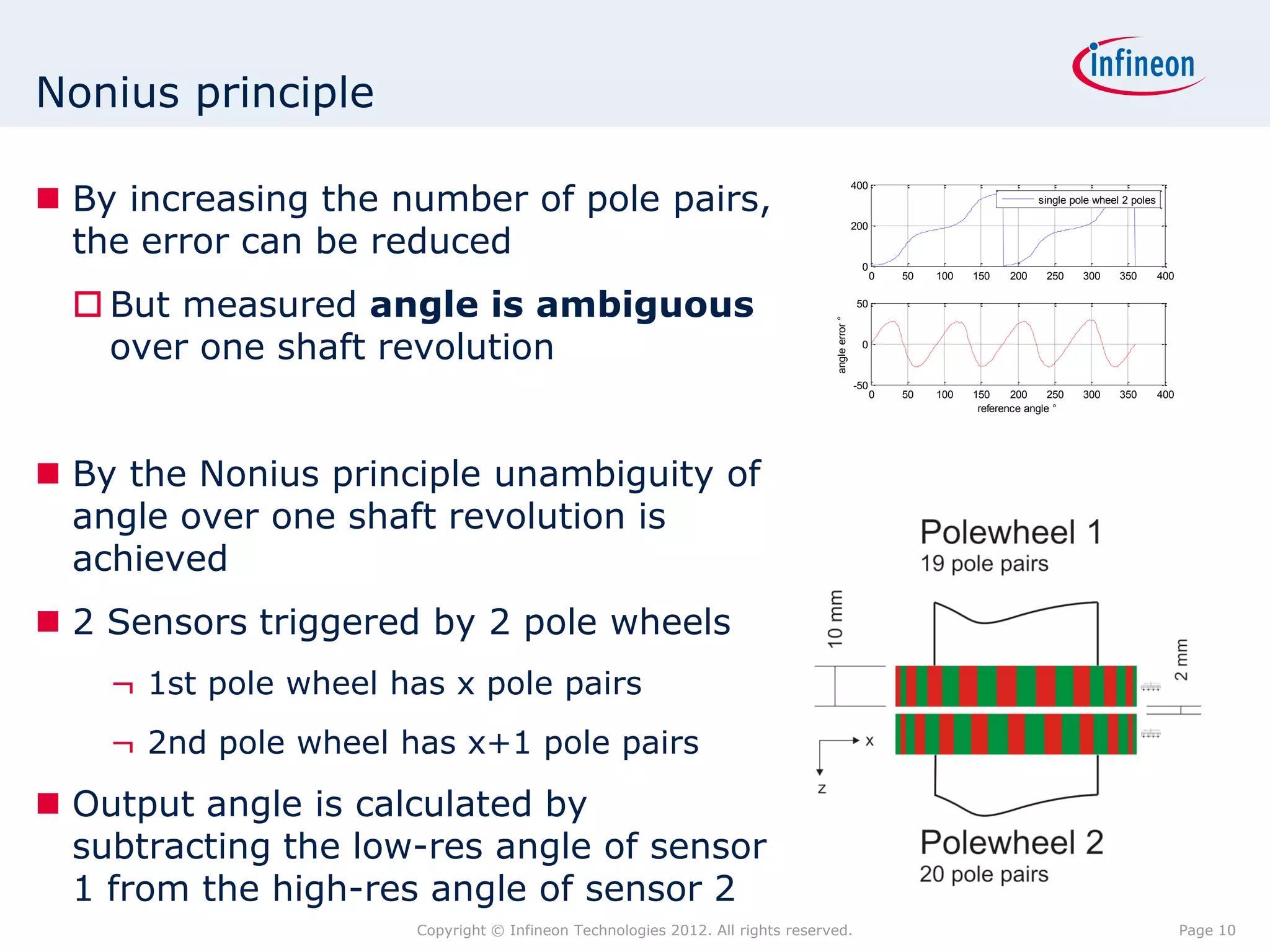

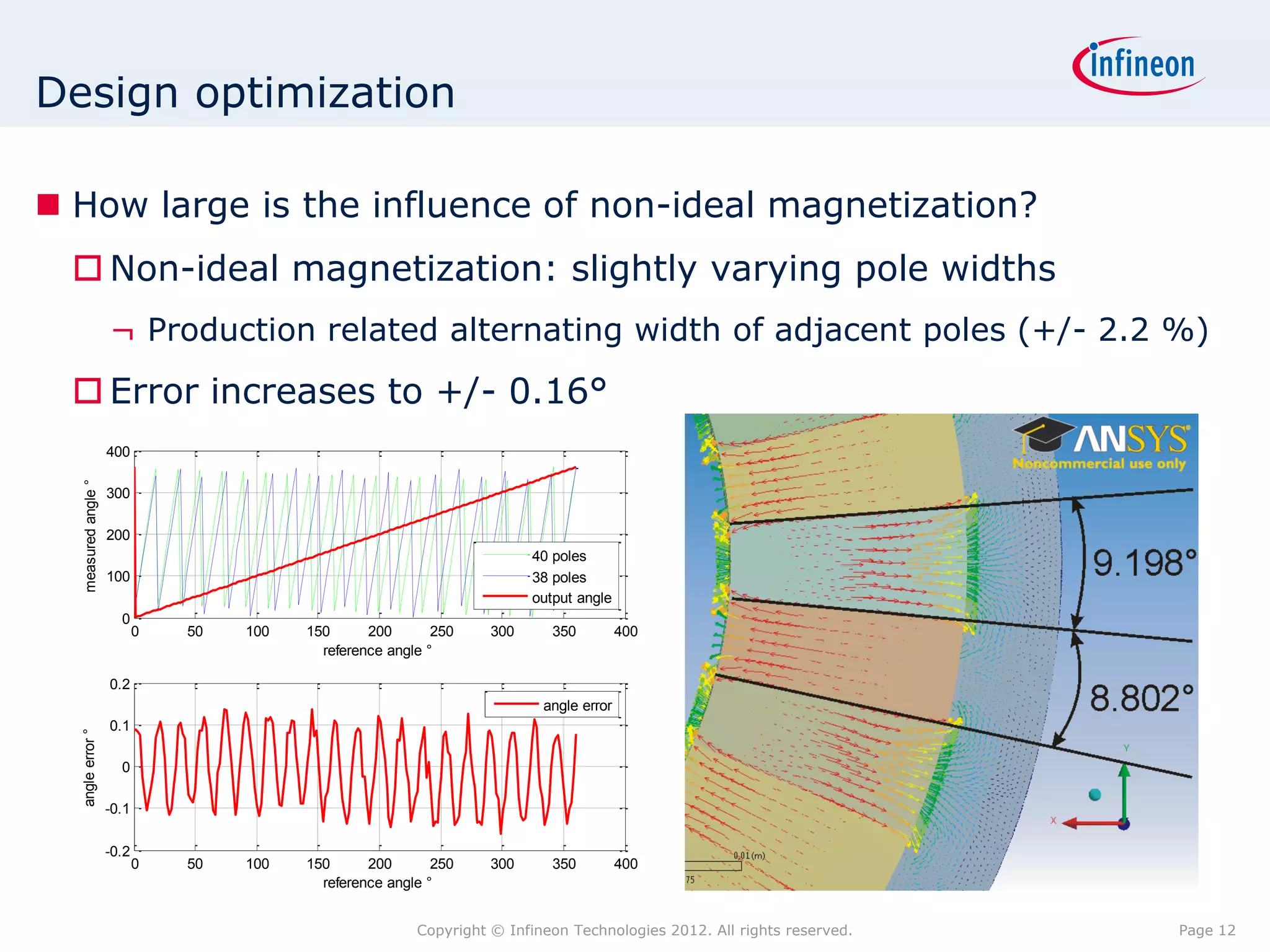
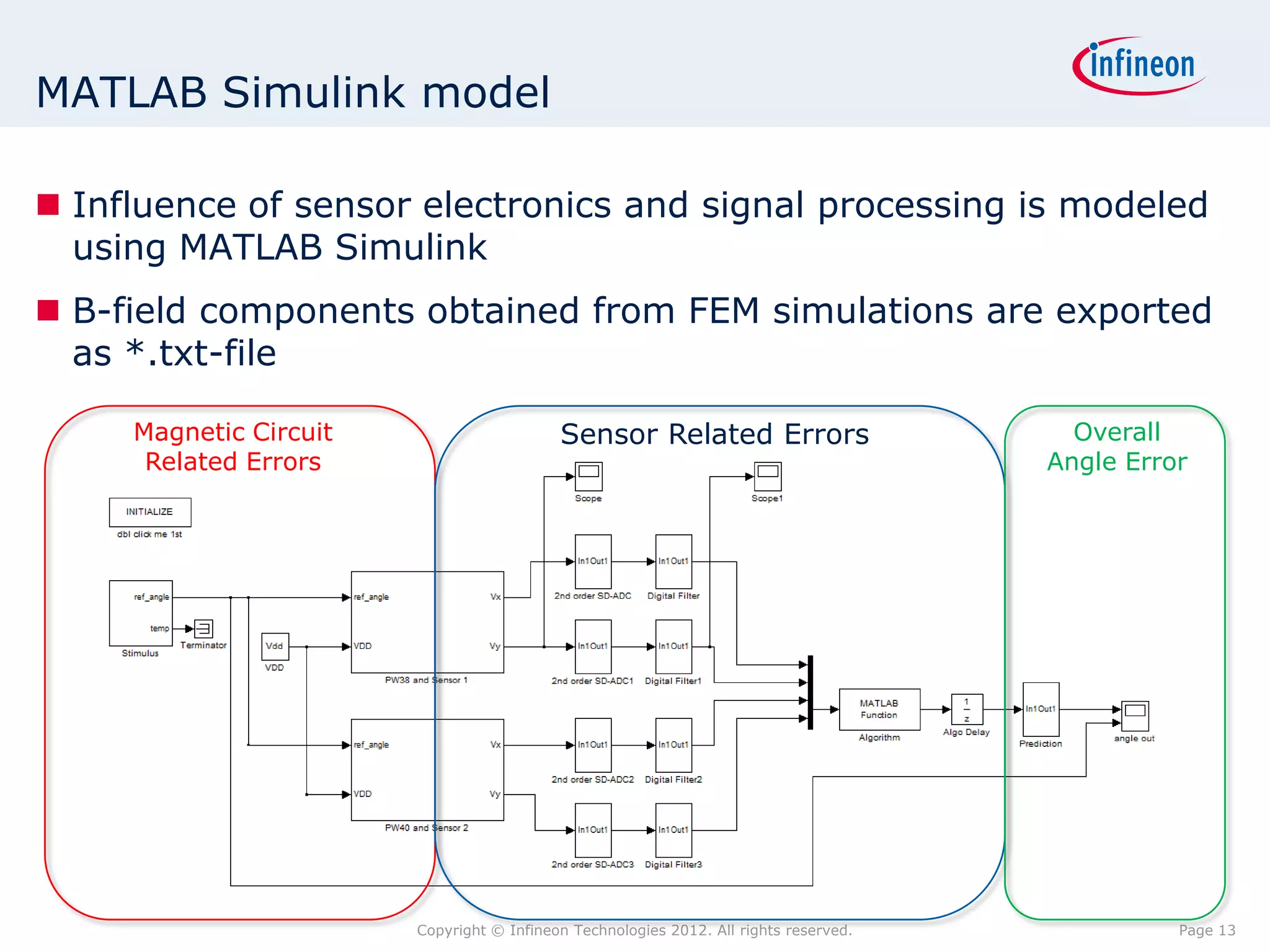
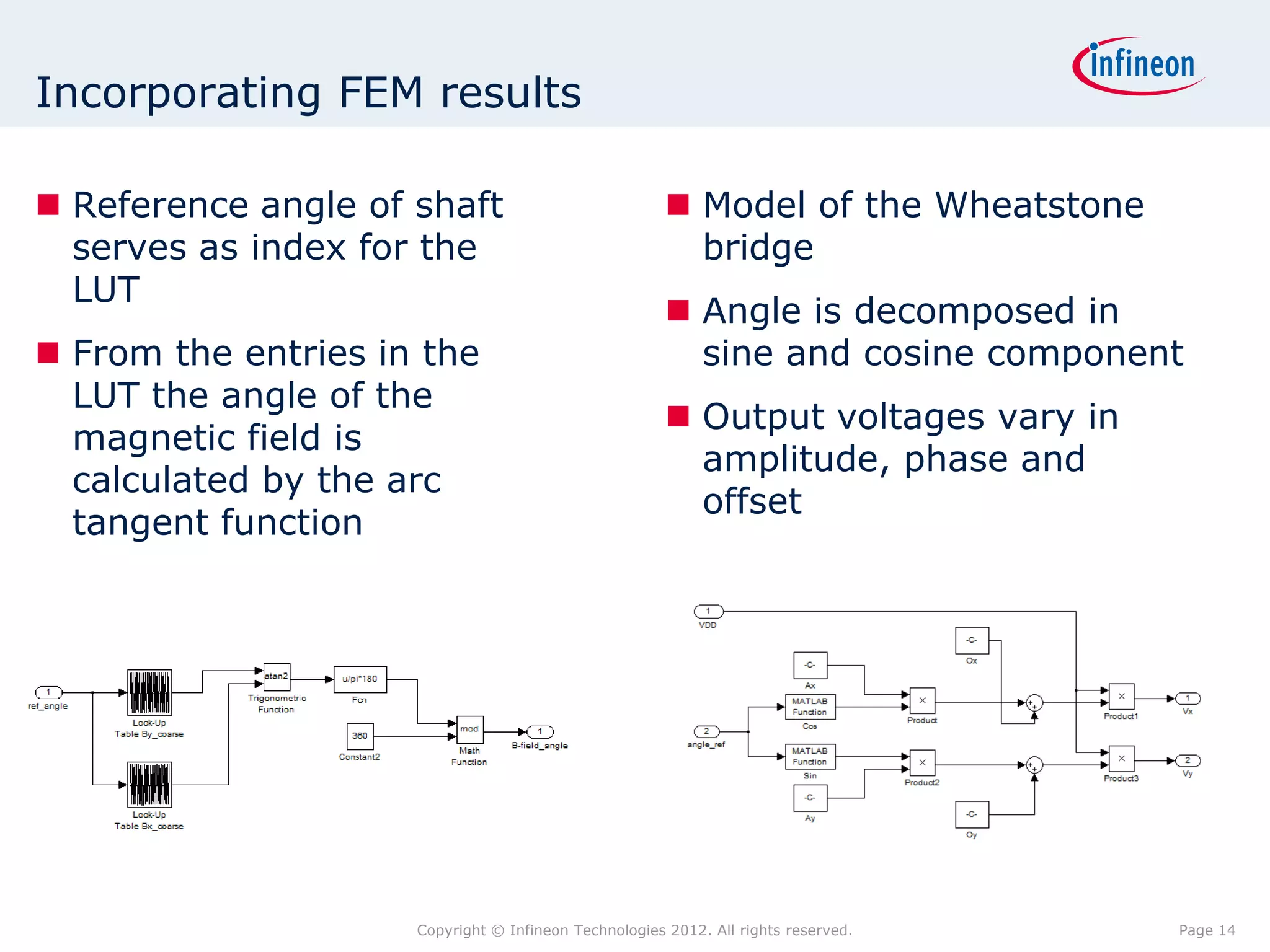
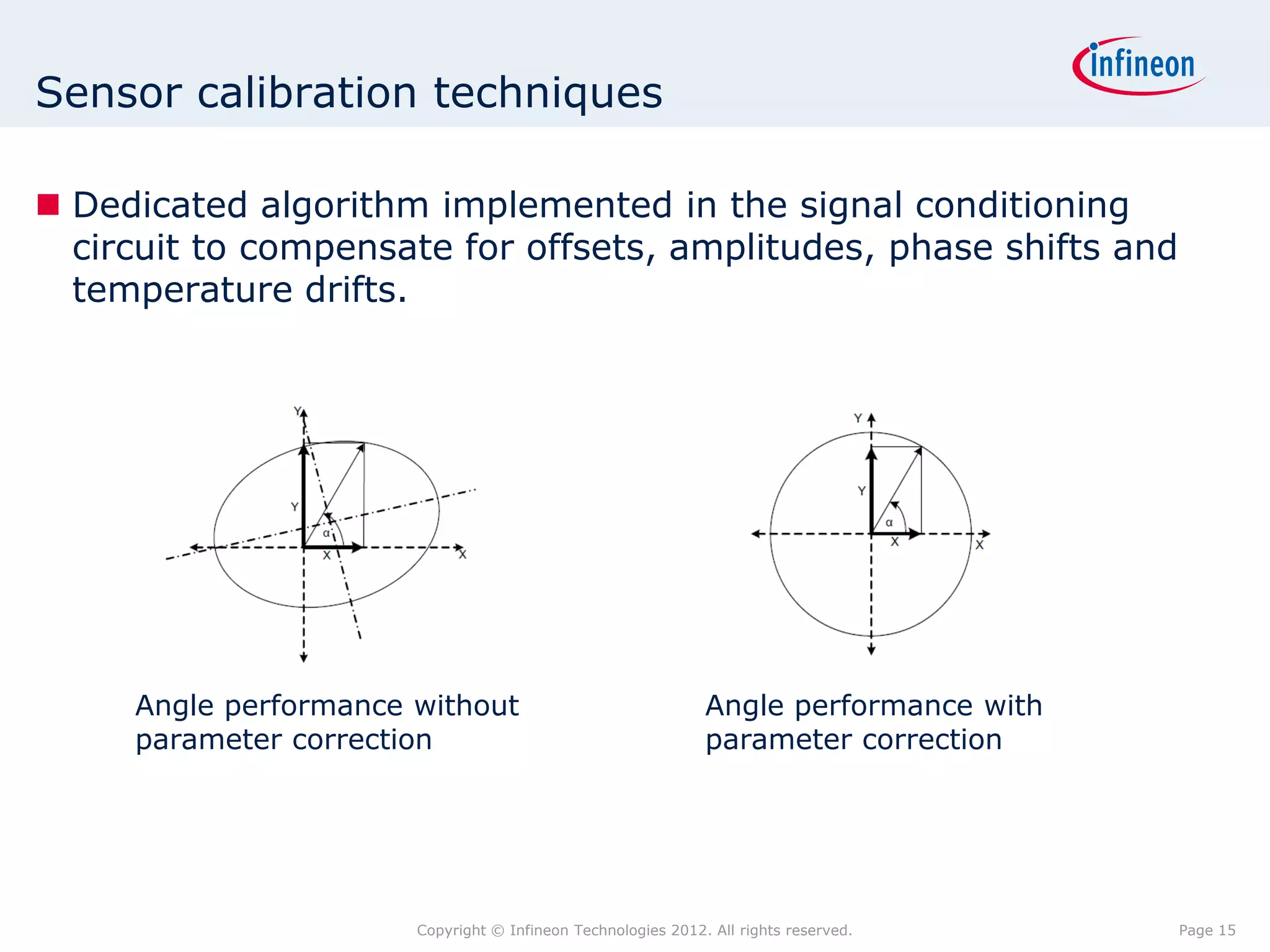
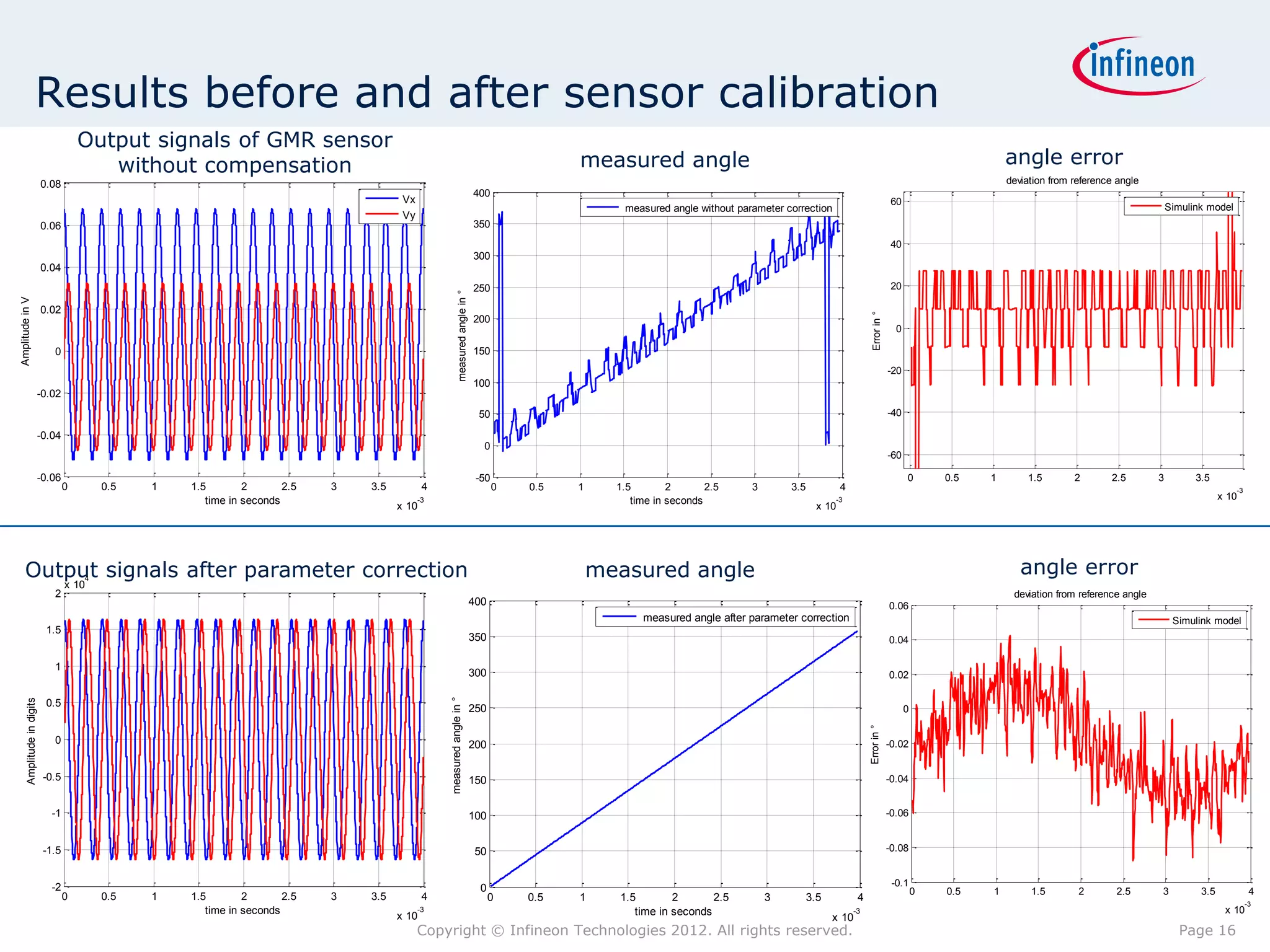

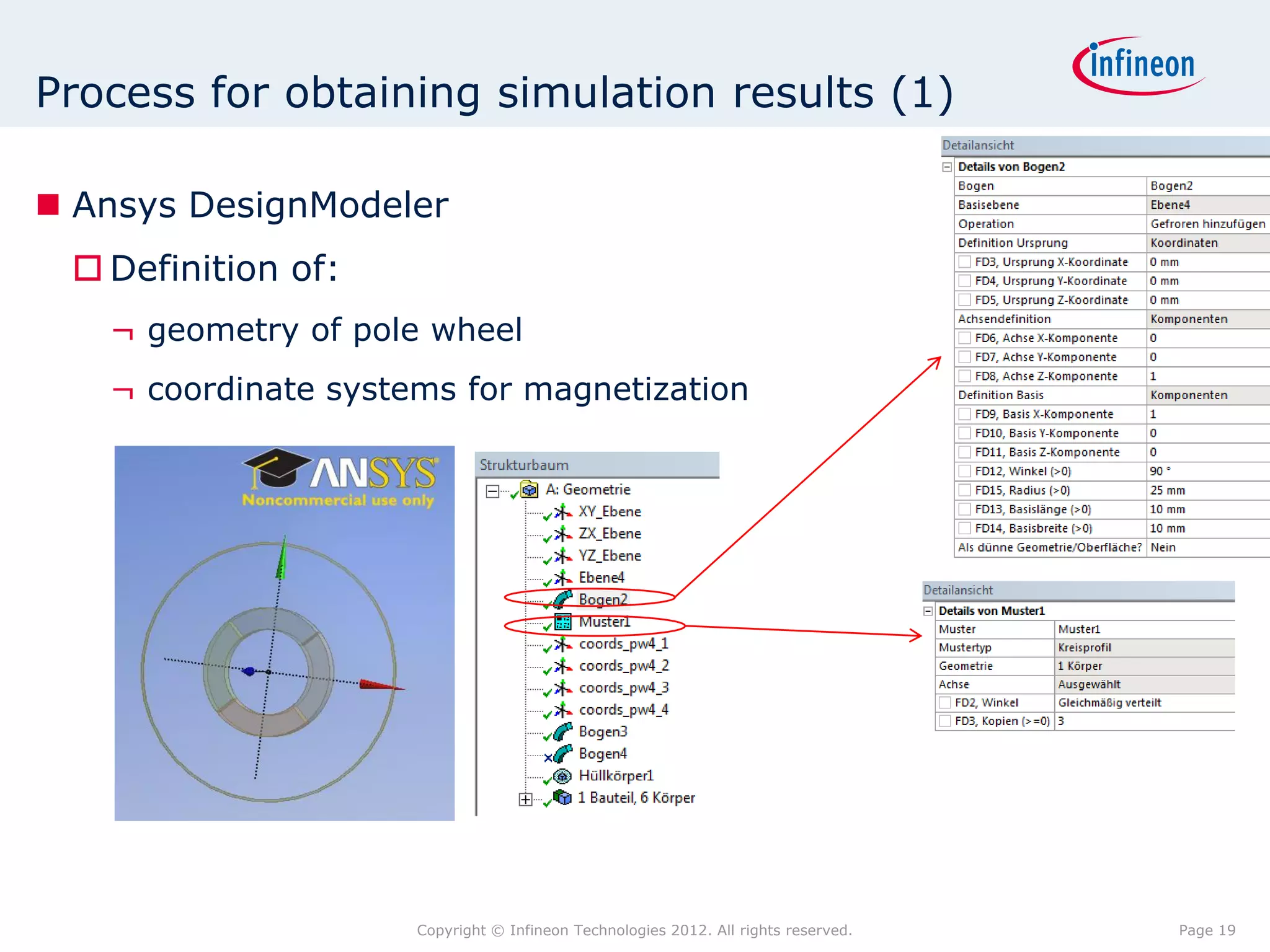
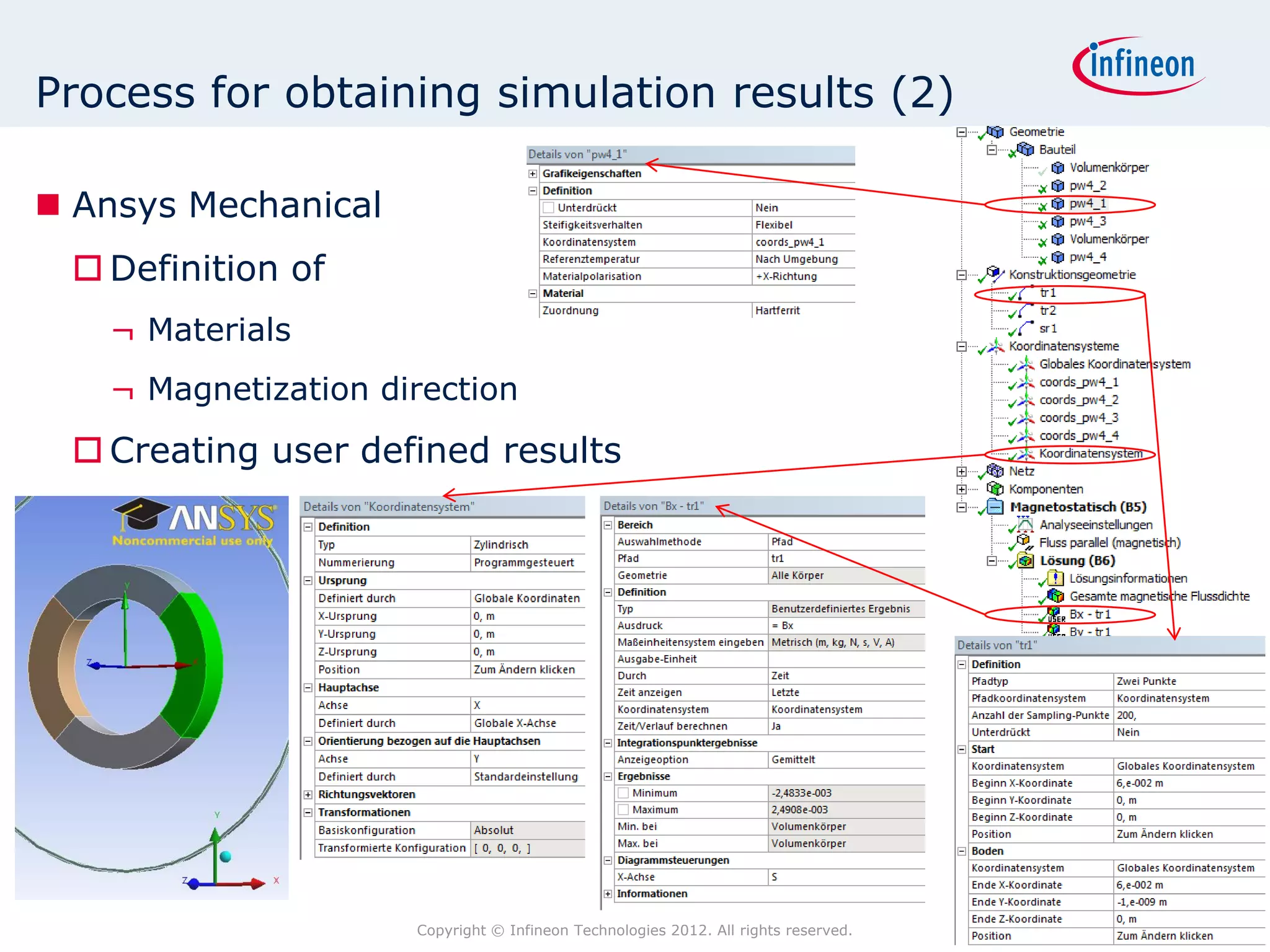
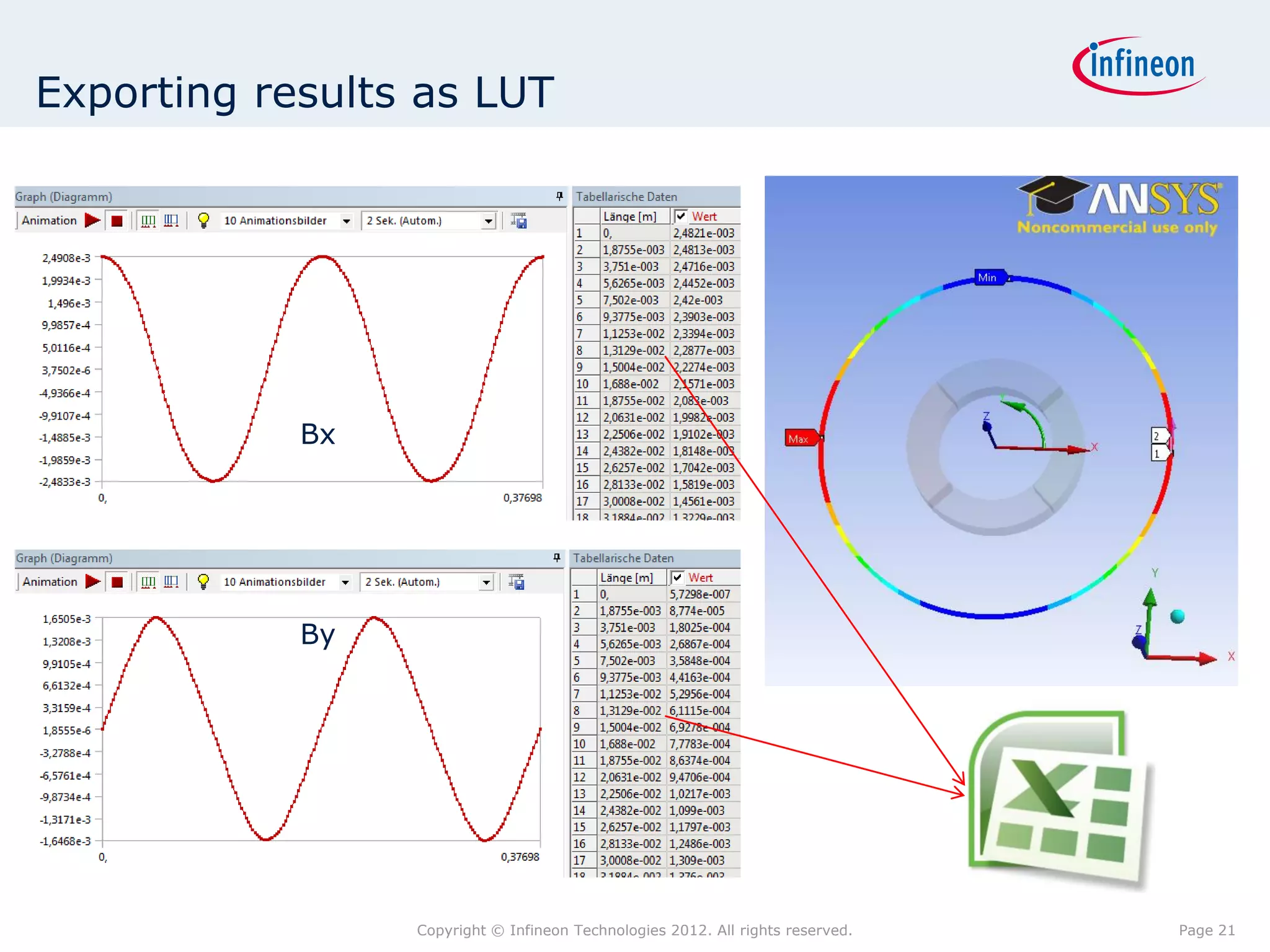

The document discusses simulating a magnetic angle measurement system using ANSYS and MATLAB/Simulink. It describes modeling the magnetic circuit of a permanent magnet and pole wheels using ANSYS, exporting the flux density results, and incorporating them into a Simulink model of a GMR sensor and signal conditioning circuit. The goals are to analyze error sources, optimize the design, and test sensor calibration techniques.































































![10 articol toma_rtn_2012[1]](https://cdn.slidesharecdn.com/ss_thumbnails/10articoltomartn20121-130122093848-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)




























![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)









