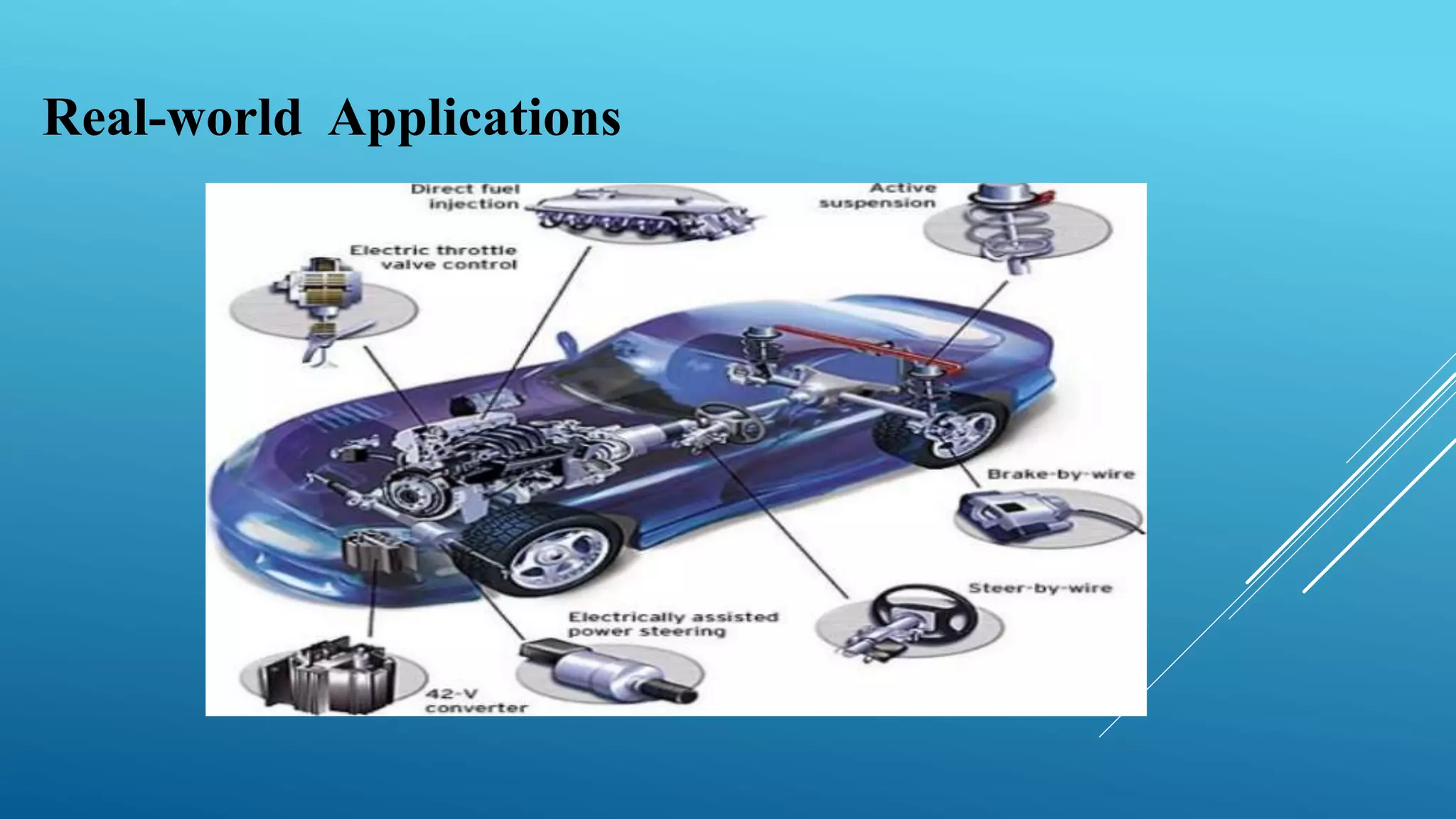
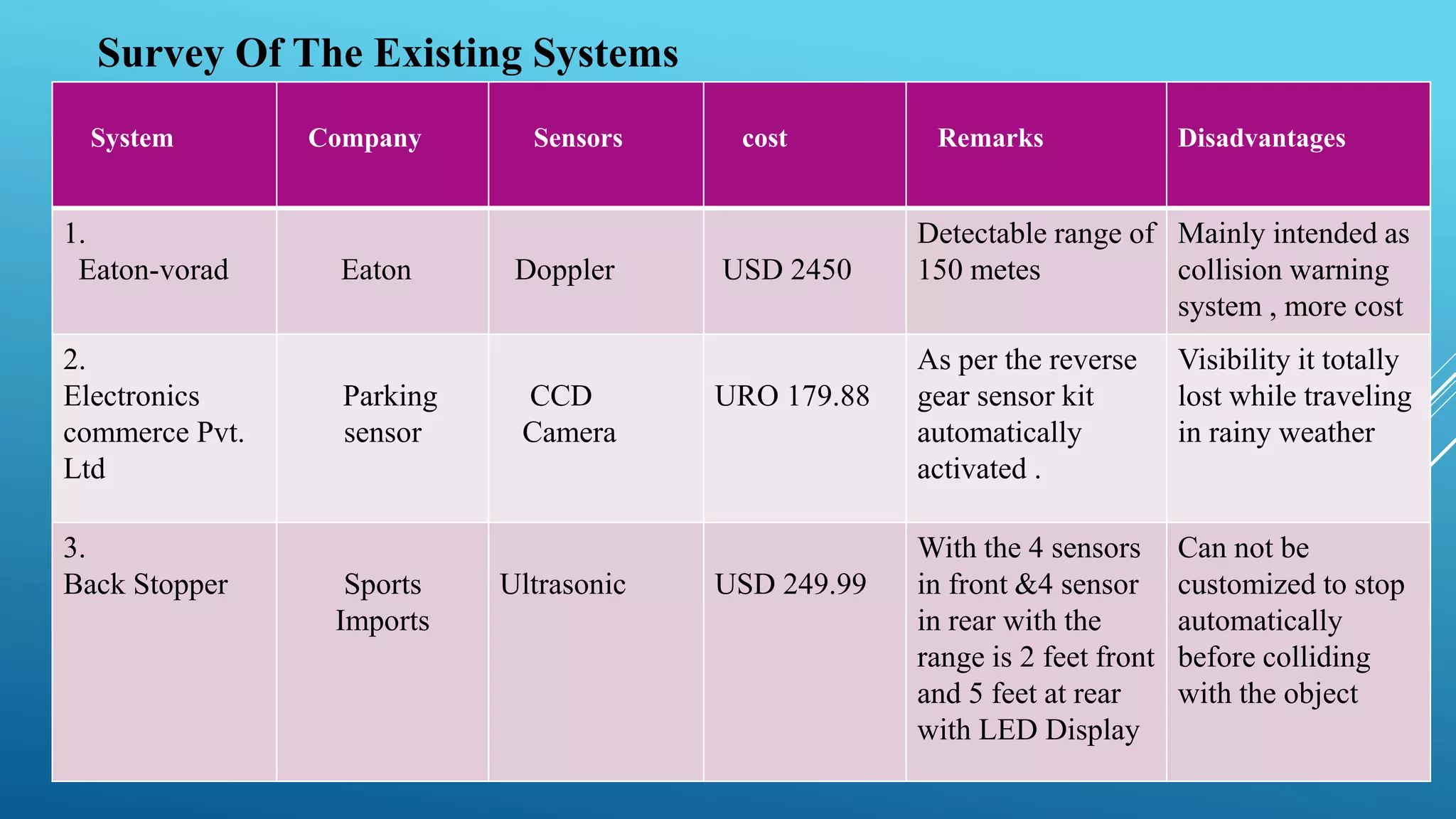
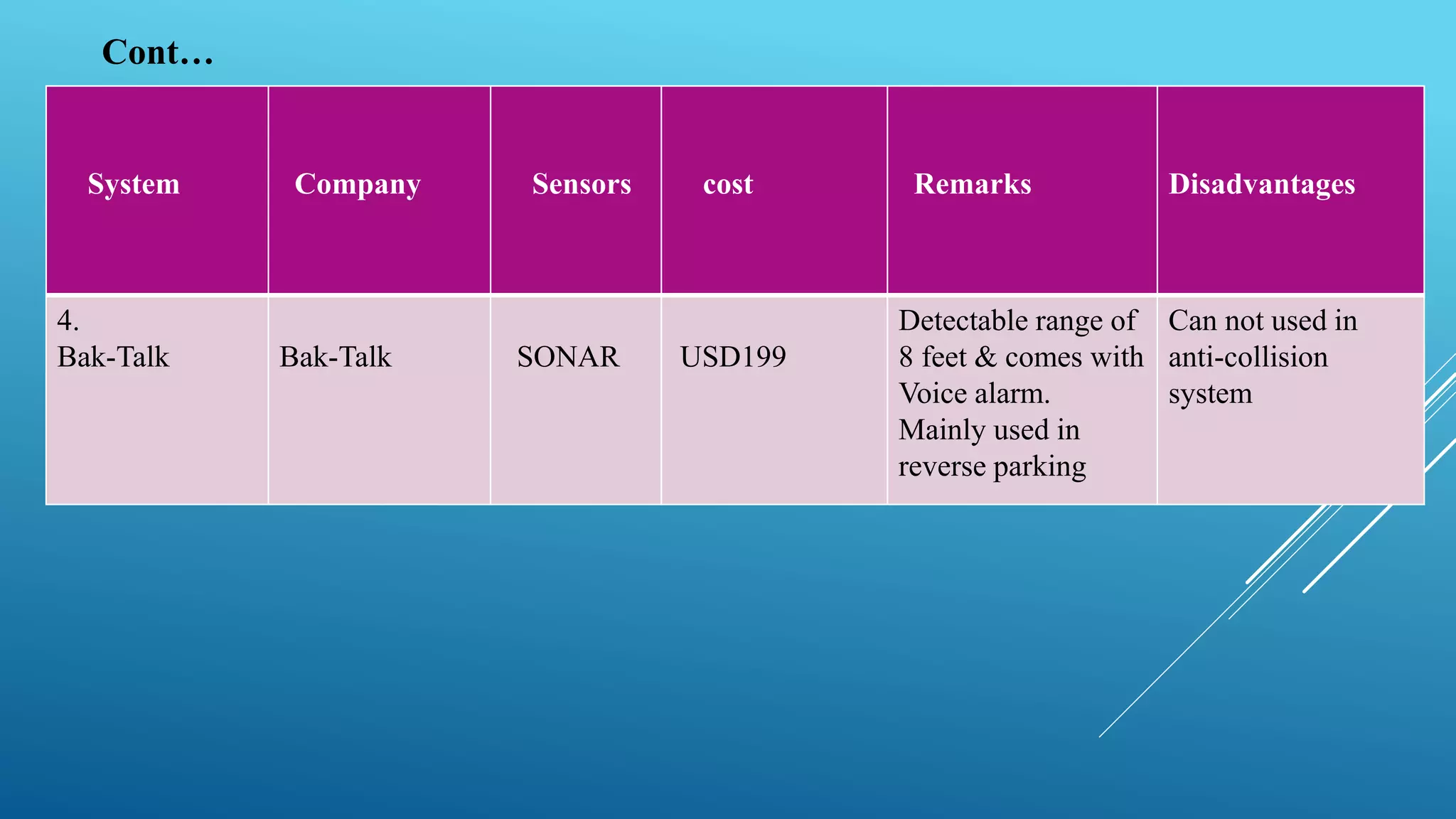
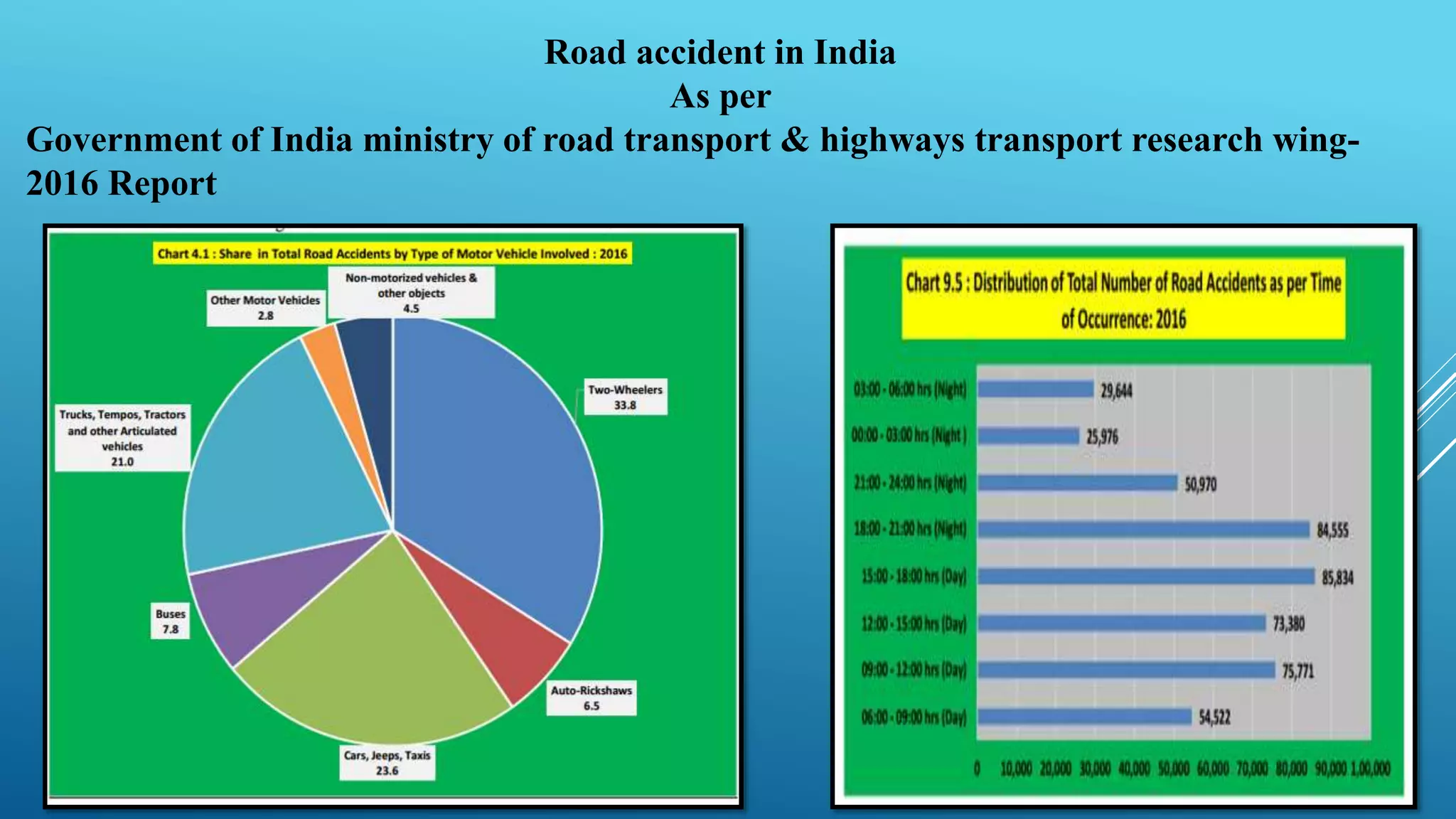
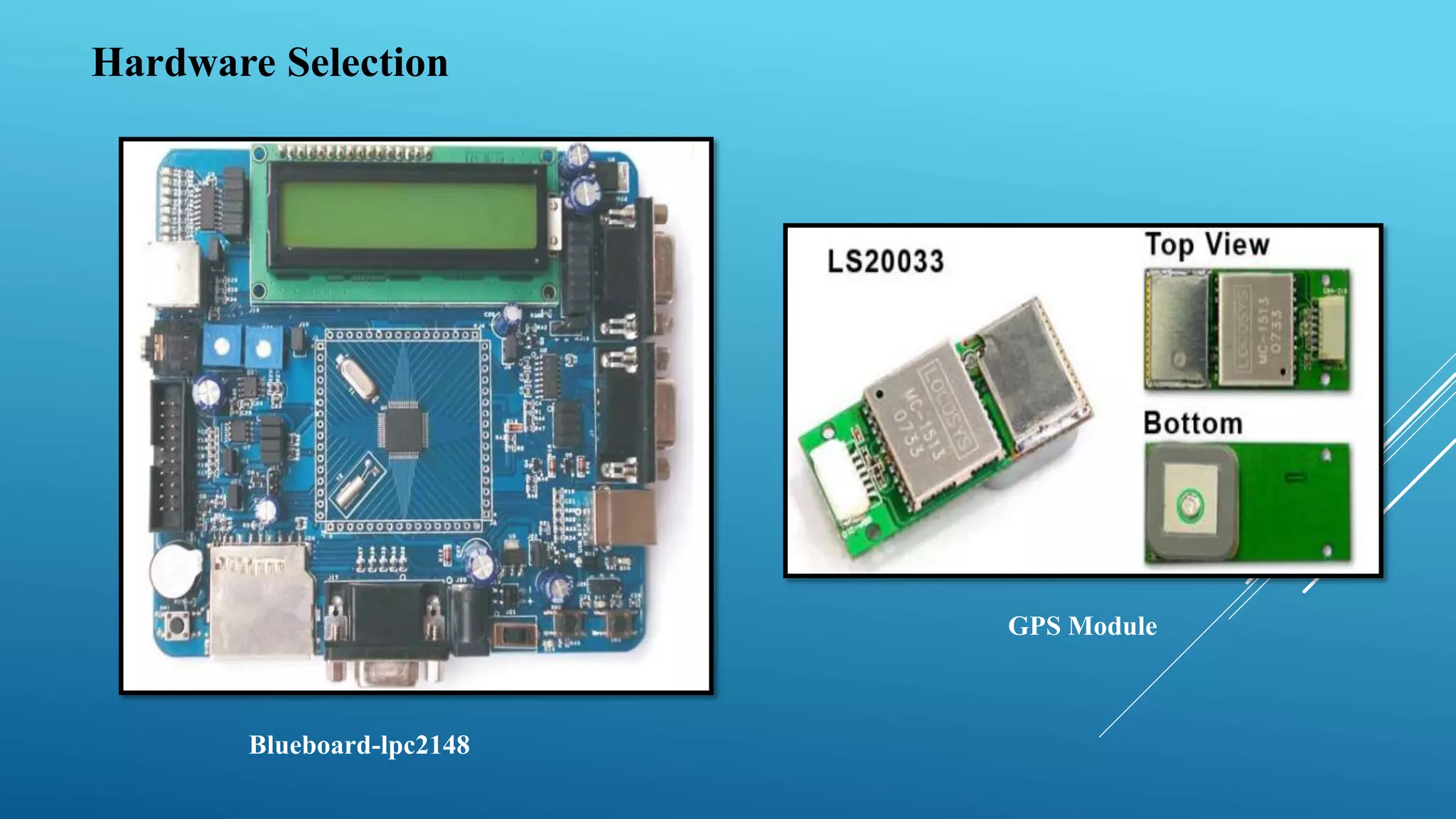
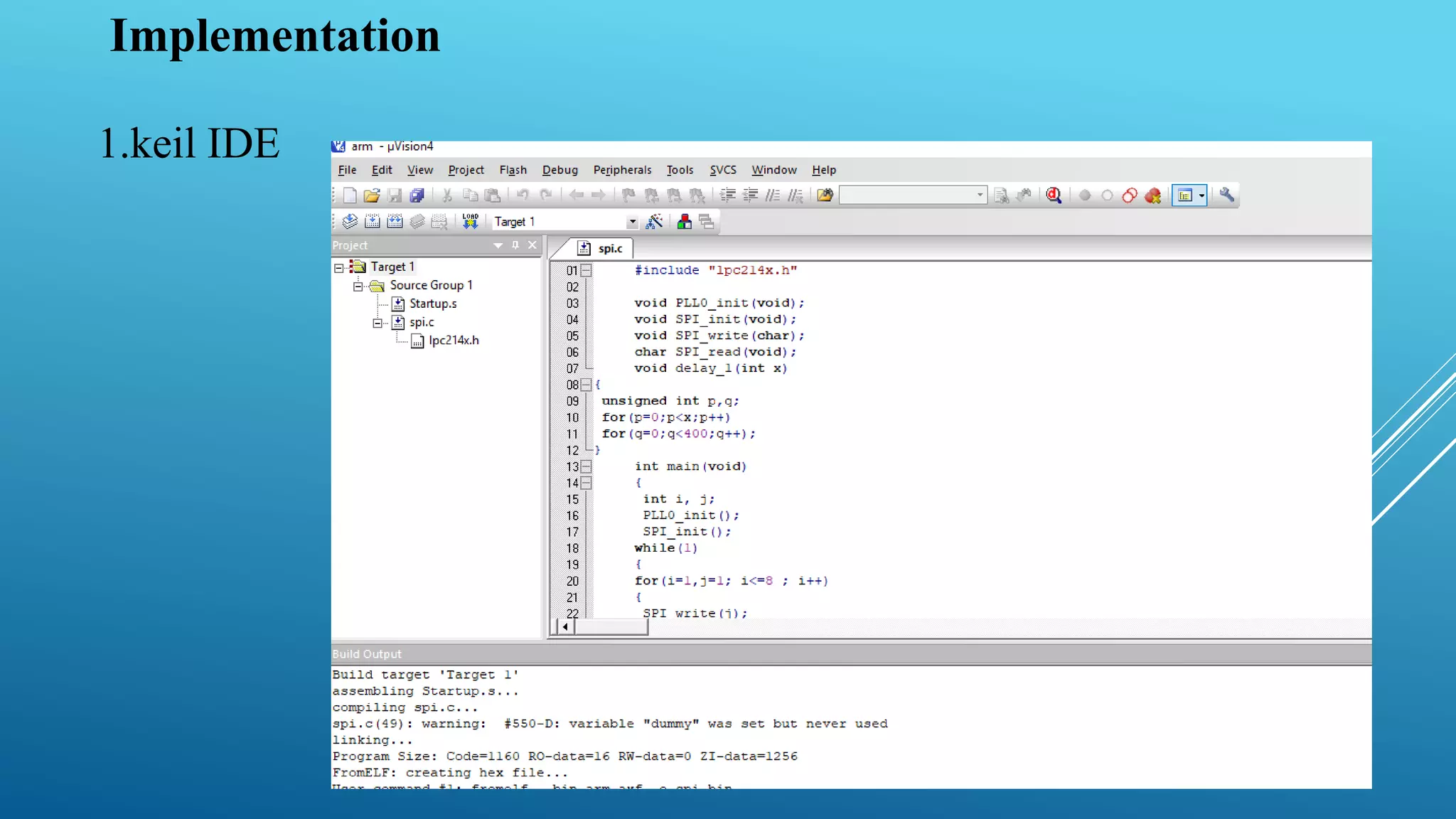
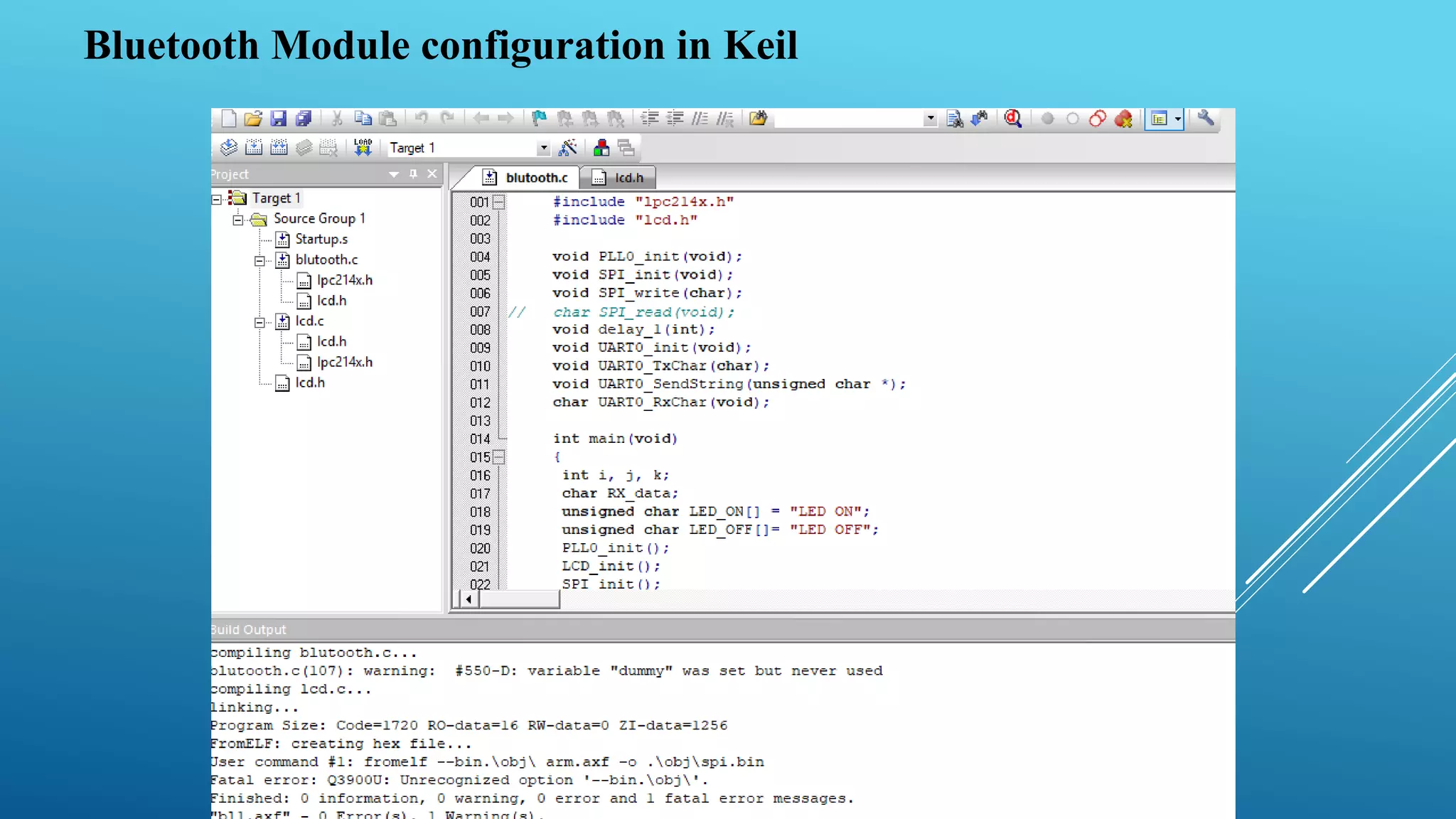
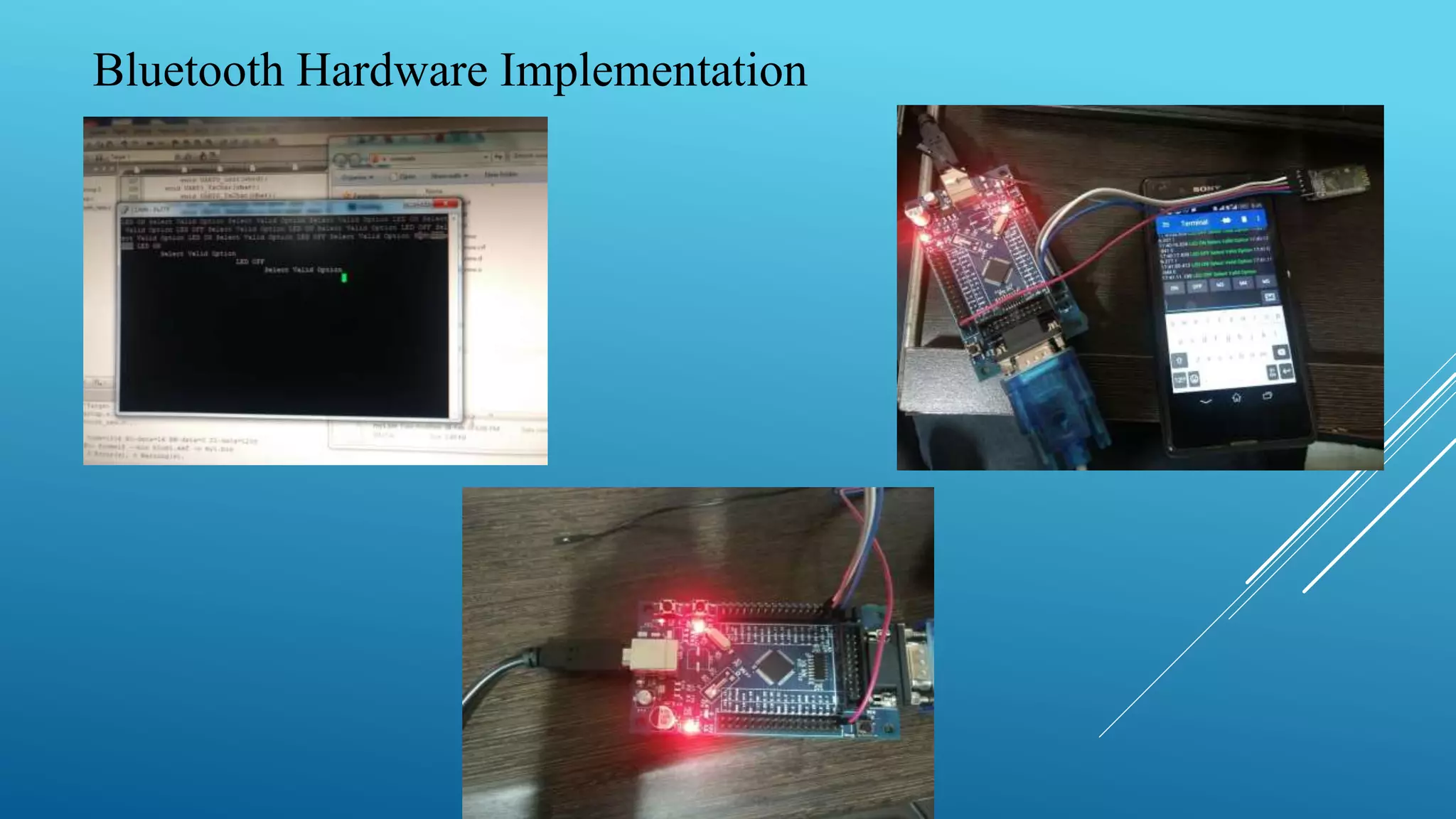
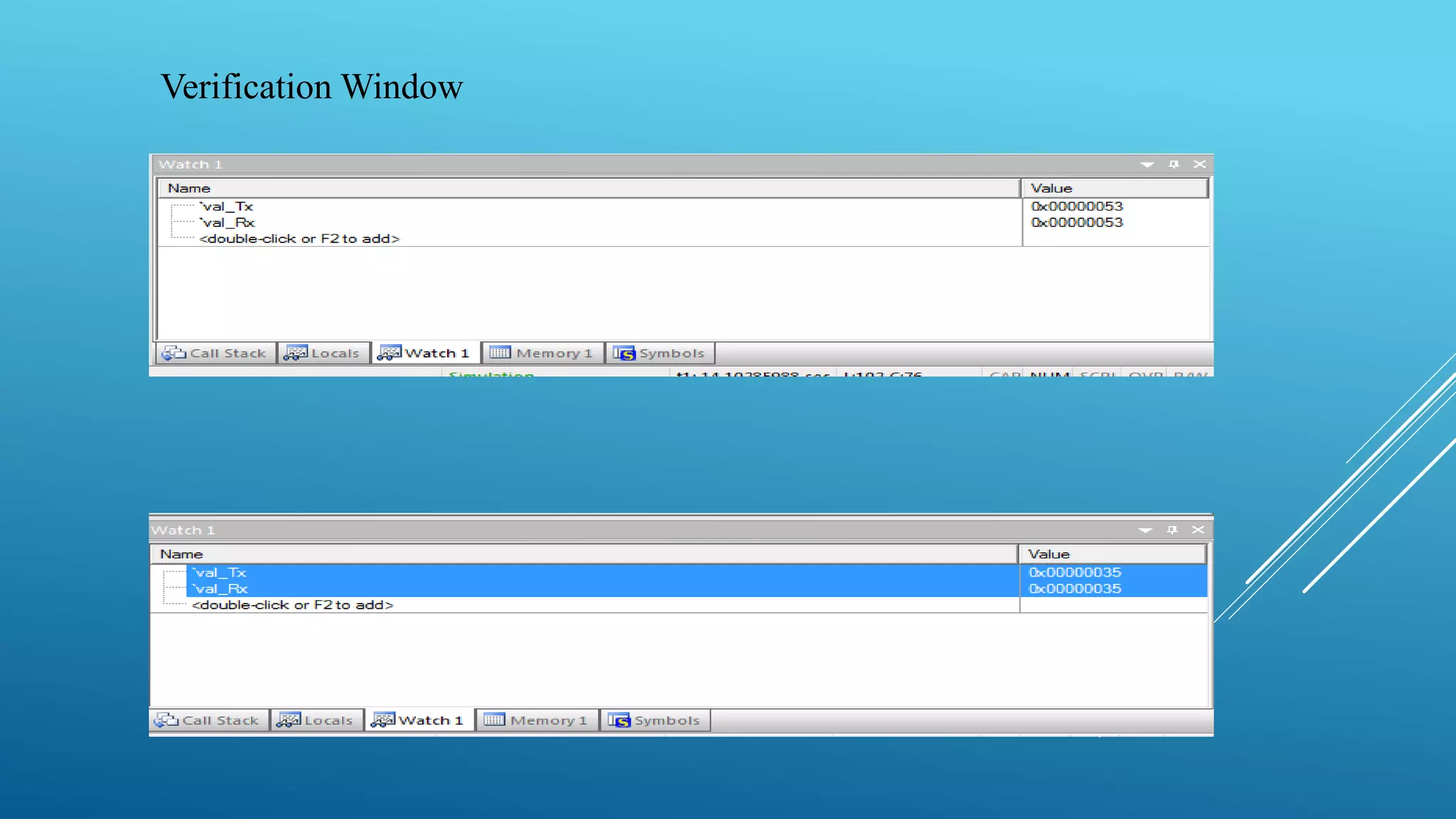
This document presents a mid-thesis report on a driver assistance system using CAN network. It introduces the system being developed including ultrasonic sensors, CAN module, LCD display, and Bluetooth/GPS modules. It discusses existing collision warning systems and identifies problems with traffic safety. The proposed system is intended to detect obstacles and warn the driver in advance of possible collisions. The implementation plan involves using Keil IDE to simulate CAN communication between sensors and microcontroller. The project aims to improve response time and provide safety for drivers in congested traffic conditions.

























































![[BDD 2025 - Full-Stack Development] The Modern Stack: Building Web & AI Appli...](https://cdn.slidesharecdn.com/ss_thumbnails/fs-themodernstackbuildingwebaiapplicationswithserverless-251124030844-388cf04f-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DevFest Strasbourg 2025] - NodeJs Can do that !!](https://cdn.slidesharecdn.com/ss_thumbnails/devfeststrasbourg2025-nodejscandothat-251127142731-da65b6fd-thumbnail.jpg?width=640&height=640&fit=bounds)



![[BDD 2025 - Mobile Development] Exploring Apple’s On-Device FoundationModels](https://cdn.slidesharecdn.com/ss_thumbnails/md-exploringappleson-devicefoundationmodels-251124030840-d690542c-thumbnail.jpg?width=640&height=640&fit=bounds)

![Support, Monitoring, Continuous Improvement & Scaling Agentic Automation [3/3]](https://cdn.slidesharecdn.com/ss_thumbnails/agenticcommunityseries-day3-cfd-251120170304-ddef8112-thumbnail.jpg?width=640&height=640&fit=bounds)









