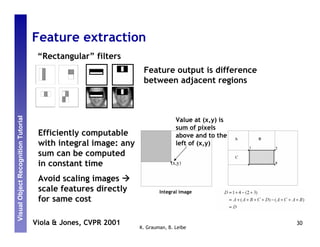
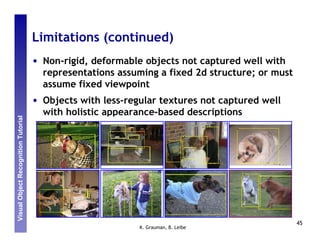
This document summarizes a tutorial on visual object recognition. It discusses several key topics:
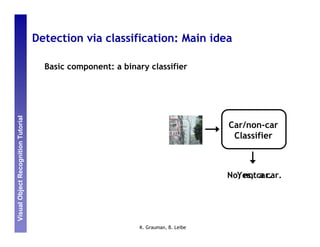
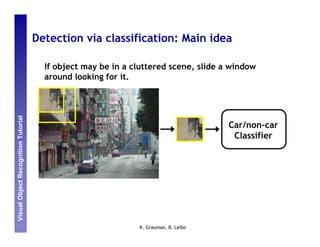
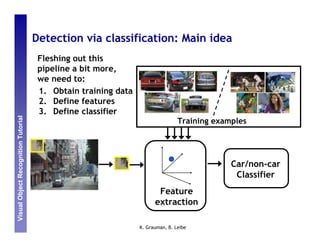
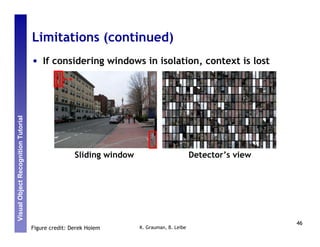
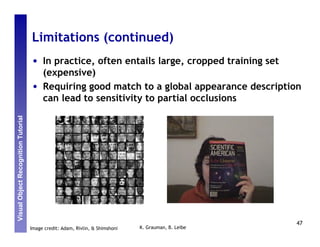
1. Detection via classification using sliding windows and global appearance features like histograms or gradients.
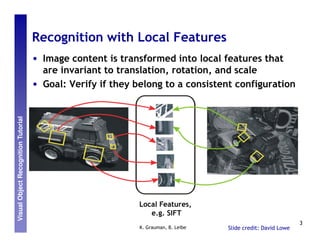
2. Local invariant features for detection and description, as well as using them for specific object recognition.
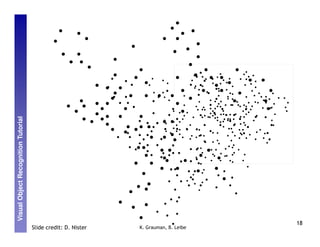
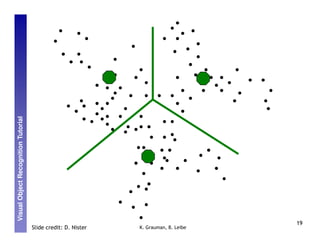
3. Visual words and "bags of words" representations for image categorization by clustering local features.
4. Current challenges in visual object recognition like handling scale, clutter, context and learning with minimal supervision.

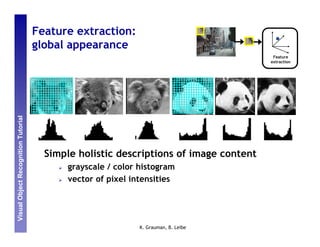
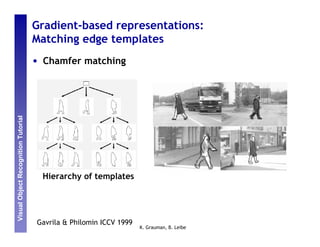
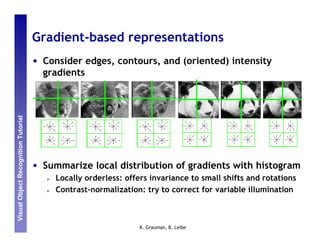
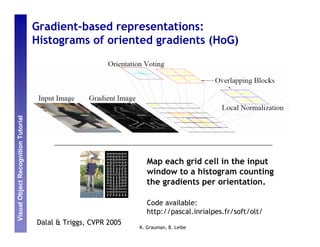
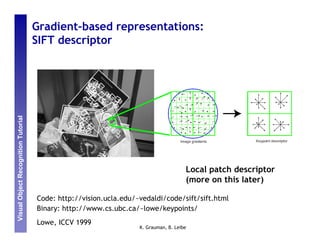
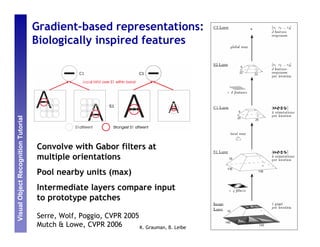
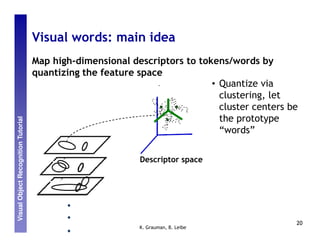
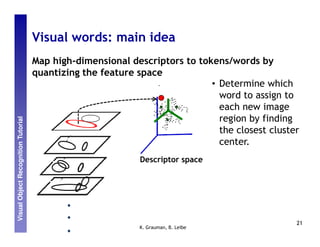
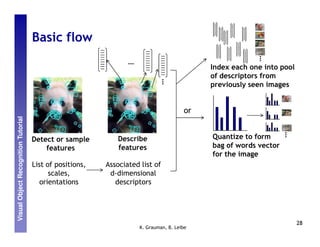
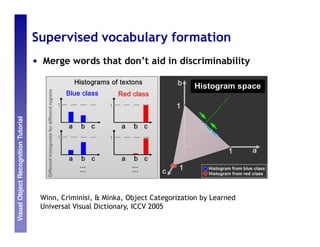
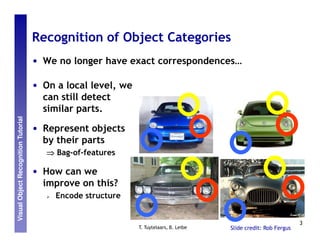
![Object Categorization
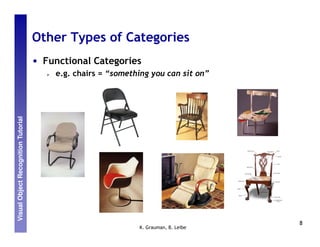
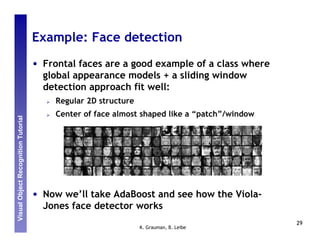
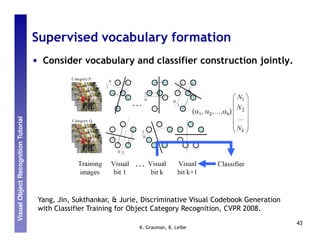
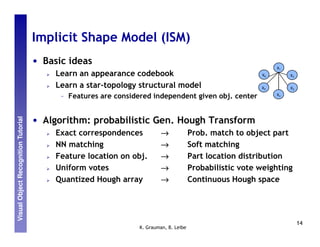
• Task Description
“Given a small number of training images of a category,
Visual Object Recognition Tutorial Computing
recognize a-priori unknown instances of that category and assign
the correct category label.”
• Which categories are feasible visually?
Perceptual and Sensory Augmented
Extensively studied in Cognitive Psychology,
e.g. [Brown’58]
“Fido” German dog animal living
shepherd being
5
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-5-320.jpg)
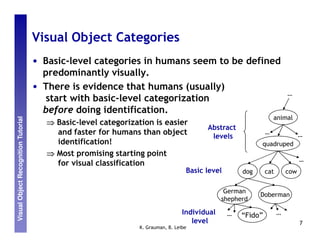
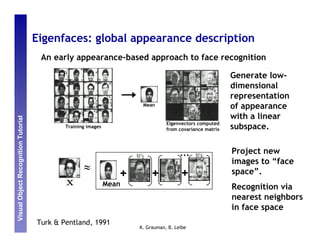
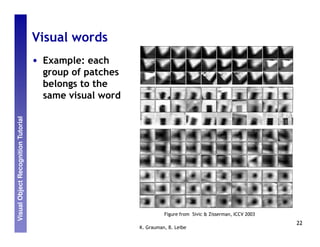
![Visual Object Categories
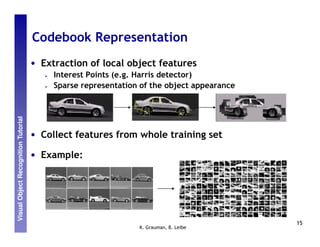
• Basic Level Categories in human categorization
[Rosch 76, Lakoff 87]
Visual Object Recognition Tutorial Computing
The highest level at which category members have similar
perceived shape
The highest level at which a single mental image reflects the
Perceptual and Sensory Augmented
entire category
The level at which human subjects are usually fastest at
identifying category members
The first level named and understood by children
The highest level at which a person uses similar motor actions
for interaction with category members
6
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-6-320.jpg)

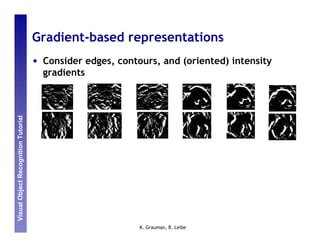
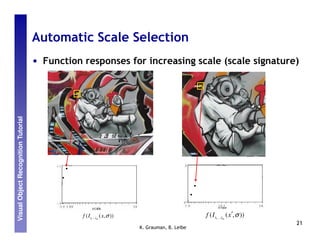
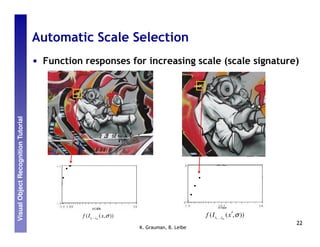
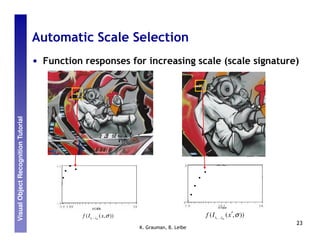
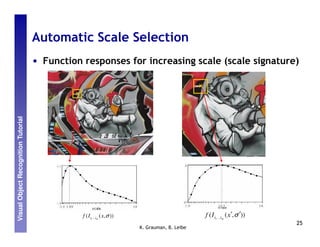
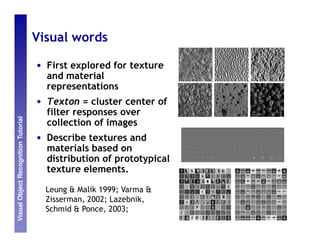
![Challenges: scale, efficiency
• Thousands to millions of pixels in an image
• Estimated 30 Gigapixels of image/video content
generated per second
Visual Object Recognition Tutorial Computing
• About half of the cerebral cortex in primates is devoted
to processing visual information [Felleman and van
Essen 1991]
Perceptual and Sensory Augmented
• 3,000-30,000 human recognizable object categories
• 30+ degrees of freedom in the pose of articulated
objects (humans)
• Billions of images indexed by Google Image Search
• 18 billion+ prints produced from digital camera images
in 2004
• 295.5 million camera phones sold in 2005
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-15-320.jpg)
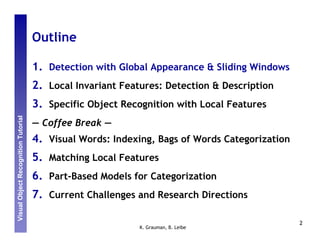

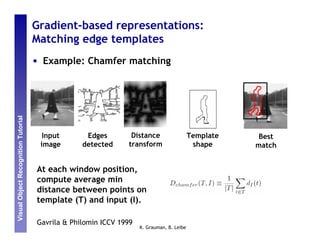

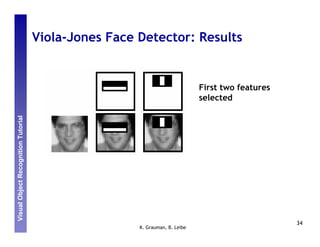
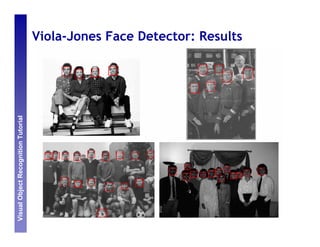
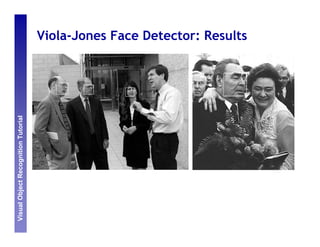
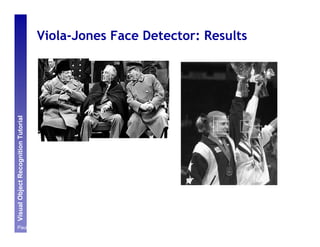
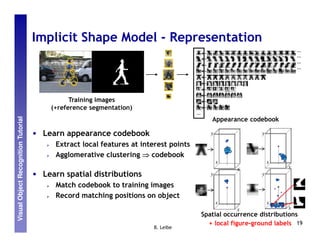
![Viola-Jones Face Detector: Summary
Train cascade of
classifiers with
Visual Object Recognition Tutorial Computing
AdaBoost
ow h
ind eac
Faces
bw o
New image
su ply t
Perceptual and Sensory Augmented
Ap
Selected features,
Non-faces thresholds, and weights
• Train with 5K positives, 350M negatives
• Real-time detector using 38 layer cascade
• 6061 features in final layer
• [Implementation available in OpenCV:
http://www.intel.com/technology/computing/opencv/]
33
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-52-320.jpg)


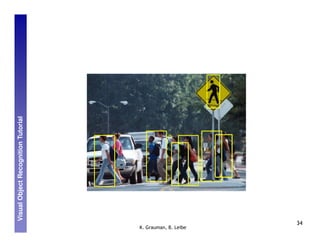
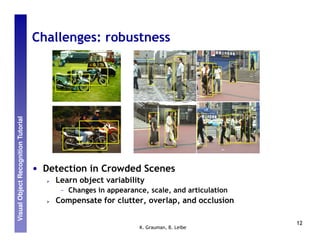
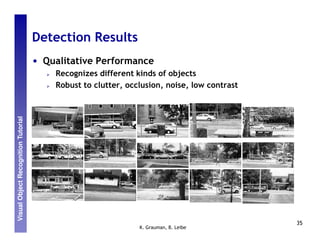
![Pedestrian detection
• Detecting upright, walking humans also possible using sliding
window’s appearance/texture; e.g.,
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
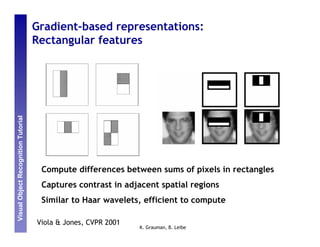
SVM with Haar wavelets Space-time rectangle SVM with HoGs [Dalal &
[Papageorgiou & Poggio, IJCV features [Viola, Jones & Triggs, CVPR 2005]
2000] Snow, ICCV 2003]
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-60-320.jpg)
![Many Existing Detectors Available
• Hessian & Harris [Beaudet ‘78], [Harris ‘88]
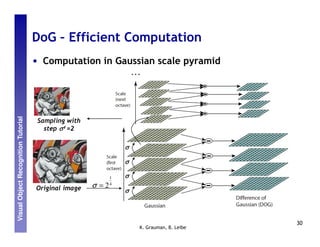
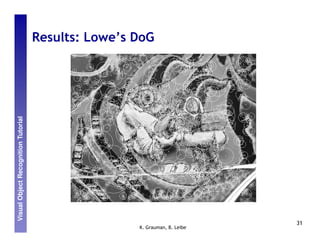
• Laplacian, DoG [Lindeberg ‘98], [Lowe 1999]
Visual Object Recognition Tutorial Computing
• Harris-/Hessian-Laplace [Mikolajczyk & Schmid ‘01]
• Harris-/Hessian-Affine [Mikolajczyk & Schmid ‘04]
• EBR and IBR [Tuytelaars & Van Gool ‘04]
Perceptual and Sensory Augmented
• MSER [Matas ‘02]
• Salient Regions [Kadir & Brady ‘01]
• Others…
6
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-73-320.jpg)
![Hessian Detector [Beaudet78]
• Hessian determinant
Ixx
Visual Object Recognition Tutorial Computing
I xx I xy
Hessian ( I ) =
I xy I yy
Perceptual and Sensory Augmented
Iyy
Ixy
Intuition: Search for strong
derivatives in two
orthogonal directions
8
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-75-320.jpg)
![Hessian Detector [Beaudet78]
• Hessian determinant
Ixx
Visual Object Recognition Tutorial Computing
I xx I xy
Hessian ( I ) =
I xy I yy
Perceptual and Sensory Augmented
Iyy
Ixy
2
det( Hessian( I )) = I xx I yy − I xy
In Matlab:
I xx . ∗ I yy − ( I xy )^ 2
9
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-76-320.jpg)
![Hessian Detector – Responses [Beaudet78]
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
Effect: Responses mainly
on corners and strongly
textured areas.
10](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-77-320.jpg)
![Perceptual and Sensory Augmented
Visual Object Recognition Tutorial Computing
Hessian Detector – Responses [Beaudet78]
11](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-78-320.jpg)
![Harris Detector [Harris88]
• Second moment matrix
(autocorrelation matrix)
Visual Object Recognition Tutorial Computing
I x2 (σ D ) I x I y (σ D )
µ (σ I , σ D ) = g (σ I ) ∗ 2
I x I y (σ D ) I y (σ D )
Perceptual and Sensory Augmented
Intuition: Search for local
neighborhoods where the
image content has two main
directions (eigenvectors).
12
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-79-320.jpg)
![Harris Detector [Harris88]
• Second moment matrix
(autocorrelation matrix)
Visual Object Recognition Tutorial Computing
I x2 (σ D ) I x I y (σ D )
µ (σ I , σ D ) = g (σ I ) ∗ 2
I x I y (σ D ) I y (σ D )
Perceptual and Sensory Augmented
Ix Iy
1. Image derivatives
gx(σD), gy(σD),
13
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-80-320.jpg)
![Harris Detector [Harris88]
• Second moment matrix
(autocorrelation matrix)
Visual Object Recognition Tutorial Computing
I x2 (σ D ) I x I y (σ D )
µ (σ I , σ D ) = g (σ I ) ∗ 2
I x I y (σ D ) I y (σ D )
Perceptual and Sensory Augmented
Ix Iy
1. Image derivatives
gx(σD), gy(σD),
Ix2 Iy2 IxIy
2. Square of
derivatives
14
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-81-320.jpg)
![Harris Detector [Harris88]
• Second moment matrix
(autocorrelation matrix)
Visual Object Recognition Tutorial Computing
I x2 (σ D ) I x I y (σ D )
µ (σ I , σ D ) = g (σ I ) ∗ 2
I x I y (σ D ) I y (σ D )
Ix Iy
1. Image
Perceptual and Sensory Augmented
derivatives
Iy
2. Square of Ix2 Iy2 IxIy
1. Image derivatives derivatives
gx(σD), gy(σD),
2.3. Square of
Gaussian
filter g(σI)
derivatives
g(Ix2) g(Iy2) g(IxIy)
15](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-82-320.jpg)
![Harris Detector [Harris88]
• Second moment matrix
(autocorrelation matrix)
I x2 (σ D ) I x I y (σ D )
Visual Object Recognition Tutorial Computing
µ (σ I , σ D ) = g (σ I ) ∗ 2 Ix Iy
I x I y (σ D ) I y (σ D ) 1. Image
derivatives
Ix2 Iy2 IxIy
Perceptual and Sensory Augmented
2. Square of
derivatives Iy
3. Gaussian
filter g(σI)
g(Ix2) g(Iy2) g(IxIy)
4. Cornerness function – both eigenvalues are strong
har = det[µ (σ I ,σ D)] − α [trace(µ (σ I ,σ D))] =
g ( I x2 ) g ( I y ) − [ g ( I x I y )]2 − α [ g ( I x2 ) + g ( I y )]2
2 2
g(IxIy)
5. Non-maxima suppression har 16](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-83-320.jpg)
![Harris Detector – Responses [Harris88]
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
Effect: A very precise
corner detector.
17](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-84-320.jpg)
![Perceptual and Sensory Augmented
Visual Object Recognition Tutorial Computing
Harris Detector – Responses [Harris88]
18](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-85-320.jpg)

![Harris-Laplace [Mikolajczyk ‘01]
1. Initialization: Multiscale Harris corner detection
Visual Object Recognition Tutorial Computing
σ4
Perceptual and Sensory Augmented
σ3
σ2
σ
Computing Harris function Detecting local maxima 32](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-99-320.jpg)
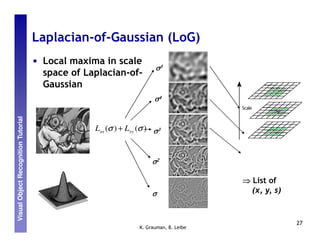
![Harris-Laplace [Mikolajczyk ‘01]
1. Initialization: Multiscale Harris corner detection
2. Scale selection based on Laplacian
Visual Object Recognition Tutorial Computing
(same procedure with Hessian ⇒ Hessian-Laplace)
Harris points
Perceptual and Sensory Augmented
Harris-Laplace points
33
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-100-320.jpg)
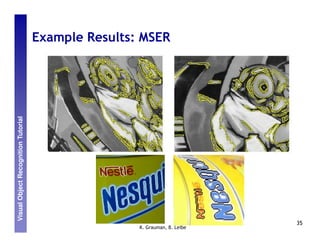
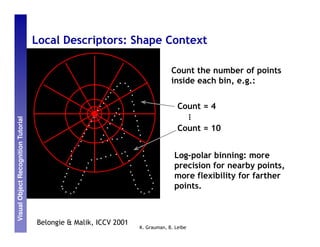
![Maximally Stable Extremal Regions [Matas ‘02]
• Based on Watershed segmentation algorithm
• Select regions that stay stable over a large parameter
Visual Object Recognition Tutorial Computing
range
Perceptual and Sensory Augmented
34
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-101-320.jpg)
![Orientation Normalization
• Compute orientation histogram [Lowe, SIFT, 1999]
• Select dominant orientation
Visual Object Recognition Tutorial Computing
• Normalize: rotate to fixed orientation
Perceptual and Sensory Augmented
0 2π
37
T. Tuytelaars, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-104-320.jpg)
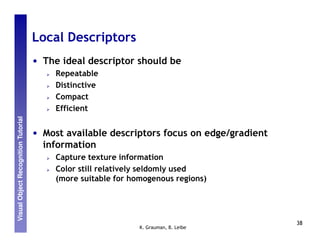
![Local Descriptors: SIFT Descriptor
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
Histogram of oriented gradients
• Captures important texture
information
• Robust to small translations /
affine deformations
[Lowe, ICCV 1999]
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-106-320.jpg)
![Local Descriptors: SURF
• Fast approximation of SIFT idea
Efficient computation by 2D box
filters & integral images
Visual Object Recognition Tutorial Computing
⇒ 6 times faster than SIFT
Equivalent quality for object
identification
Perceptual and Sensory Augmented
• GPU implementation available
Feature extraction @ 100Hz
(detector + descriptor, 640×480 img)
http://www.vision.ee.ethz.ch/~surf
[Bay, ECCV’06], [Cornelis, CVGPU’08] 40
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-107-320.jpg)
![So, What Local Features Should I Use?
• There have been extensive evaluations/comparisons
[Mikolajczyk et al., IJCV’05, PAMI’05]
Visual Object Recognition Tutorial Computing
All detectors/descriptors shown here work well
• Best choice often application dependent
Perceptual and Sensory Augmented
MSER works well for buildings and printed things
Harris-/Hessian-Laplace/DoG work well for many natural
categories
• More features are better
Combining several detectors often helps
43
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-110-320.jpg)
![Finding Consistent Configurations
• Global spatial models
Generalized Hough Transform [Lowe99]
Visual Object Recognition Tutorial Computing
RANSAC [Obdrzalek02, Chum05, Nister06]
Basic assumption: object is planar
Perceptual and Sensory Augmented
• Assumption is often justified in practice
Valid for many structures on
buildings
Sufficient for small viewpoint
variations on 3D objects
4
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-115-320.jpg)
![Generalized Hough Transform [Ballard81]
• Generalization for an arbitrary contour or shape
Choose reference point for the contour (e.g. center)
Visual Object Recognition Tutorial Computing
For each point on the contour remember where it is located
w.r.t. to the reference point
Remember radius r and angle φ
relative to the contour tangent
Perceptual and Sensory Augmented
Recognition: whenever you find
a contour point, calculate the
tangent angle and ‘vote’ for all
possible reference points
Instead of reference point, can also vote for transformation
⇒ The same idea can be used with local features!
9
K. Grauman, B. Leibe Slide credit: Bernt Schiele](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-119-320.jpg)
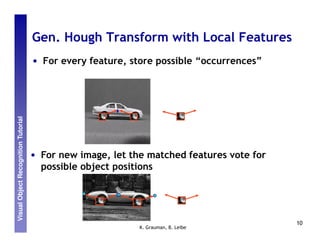
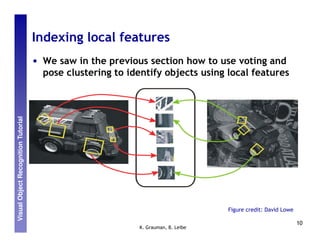
![3D Object Recognition
• Gen. HT for Recognition [Lowe99]
Typically only 3 feature matches
Visual Object Recognition Tutorial Computing
needed for recognition
Extra matches provide robustness
Affine model can be used for
planar objects
Perceptual and Sensory Augmented
12
K. Grauman, B. Leibe Slide credit: David Lowe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-121-320.jpg)
![View Interpolation
• Training
Training views from similar
Visual Object Recognition Tutorial Computing
viewpoints are clustered
based on feature matches.
Matching features between
adjacent views are linked.
Perceptual and Sensory Augmented
• Recognition
Feature matches may be
spread over several
training viewpoints.
⇒ Use the known links to “transfer votes” to other viewpoints.
[Lowe01]
13
K. Grauman, B. Leibe Slide credit: David Lowe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-122-320.jpg)
![Recognition Using View Interpolation
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
[Lowe01]
14
K. Grauman, B. Leibe Slide credit: David Lowe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-123-320.jpg)
![Location Recognition
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
Training
[Lowe04]
15
K. Grauman, B. Leibe Slide credit: David Lowe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-124-320.jpg)

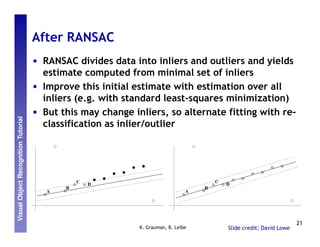
![RANSAC (RANdom SAmple Consensus) [Fischler81]
• Randomly choose a minimal subset of data points
necessary to fit a model (a sample)
• Points within some distance threshold t of model are a
Visual Object Recognition Tutorial Computing
consensus set. Size of consensus set is model’s support.
• Repeat for N samples; model with biggest support is
most robust fit
Perceptual and Sensory Augmented
Points within distance t of best model are inliers
Fit final model to all inliers
17
K. Grauman, B. Leibe Slide credit: David Lowe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-126-320.jpg)
![Comparison
Gen. Hough Transform RANSAC
• Advantages • Advantages
Very effective for recognizing General method suited to large
Visual Object Recognition Tutorial Computing
arbitrary shapes or objects range of problems
Can handle high percentage of Easy to implement
outliers (>95%) Independent of number of
Extracts groupings from clutter in dimensions
Perceptual and Sensory Augmented
linear time
• Disadvantages • Disadvantages
Quantization issues Only handles moderate number of
Only practical for small number of outliers (<50%)
dimensions (up to 4)
• Improvements available • Many variants available, e.g.
Probabilistic Extensions PROSAC: Progressive RANSAC
[Leibe08] [Chum05]
Continuous Voting Space
Preemptive RANSAC [Nister05]
24
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-131-320.jpg)
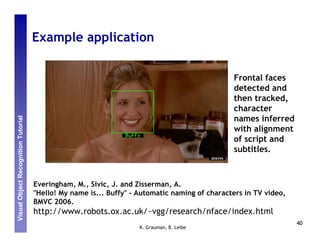
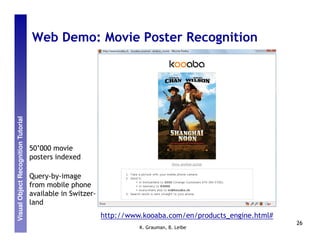
![Example Applications
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
Mobile tourist guide
• Self-localization
• Object/building recognition
• Photo/video augmentation
B. Leibe
[Quack, Leibe, Van Gool, CIVR’08] 25](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-132-320.jpg)
![Application: Large-Scale Retrieval
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
Query Results from 5k Flickr images (demo available for 100k set)
K. Grauman, B. Leibe [Philbin CVPR’07] 27](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-134-320.jpg)
![Application: Image Auto-Annotation
Moulin Rouge Old Town Square (Prague)
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
Tour Montparnasse Colosseum
Viktualienmarkt
Maypole
Left: Wikipedia image
Right: closest match from Flickr
28
[Quack CIVR’08] K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-135-320.jpg)
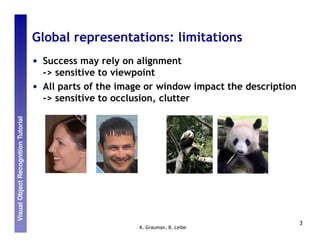
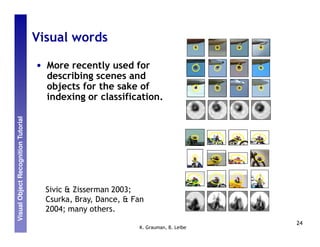
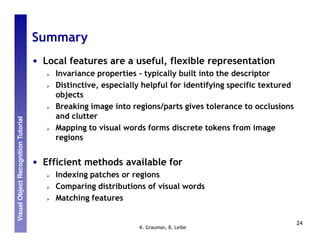
![Local representations
• Describe component regions or patches separately.
• Many options for detection & description…
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
Maximally Stable
Extremal Regions
Shape context Superpixels [Matas 02]
SIFT [Lowe 99] [Belongie 02] [Ren et al.]
Salient regions Harris-Affine Spin images Geometric Blur
[Kadir 01] [Mikolajczyk 04] [Johnson 99] [Berg 05]
4
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-140-320.jpg)
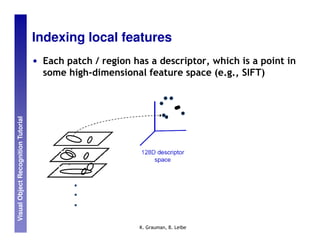
![Recall: Invariant local features
Subset of local feature types
designed to be invariant to y1
Visual Object Recognition Tutorial Computing
Scale y2
Translation …
Rotation yd
Perceptual and Sensory Augmented
Affine transformations
Illumination
x1
x2
1) Detect interest points …
2) Extract descriptors xd
[Mikolajczyk01, Matas02, Tuytelaars04, Lowe99, Kadir01,… ]
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-141-320.jpg)

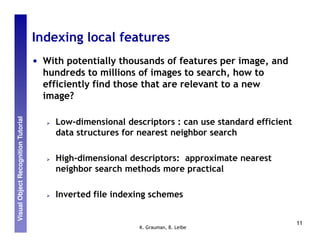
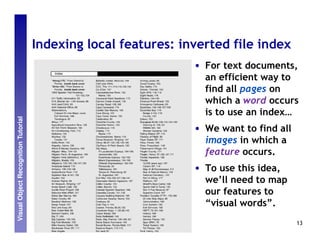
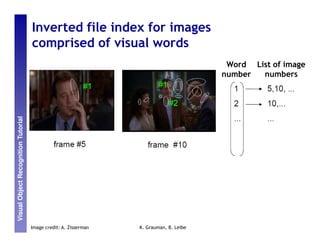
![Indexing local features: approximate
nearest neighbor search
Best-Bin First (BBF), a variant of k-d
Visual Object Recognition Tutorial Computing
trees that uses priority queue to
examine most promising branches
first [Beis & Lowe, CVPR 1997]
Perceptual and Sensory Augmented
Locality-Sensitive Hashing (LSH), a
randomized hashing technique using
hash functions that map similar
points to the same bin, with high
probability [Indyk & Motwani, 1998]
12
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-148-320.jpg)
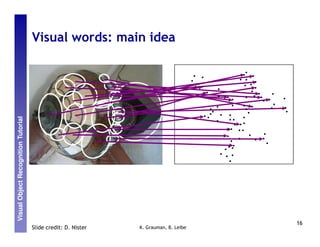
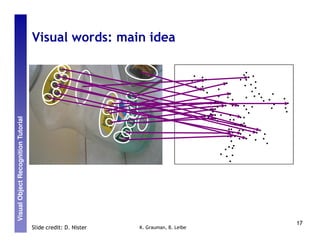
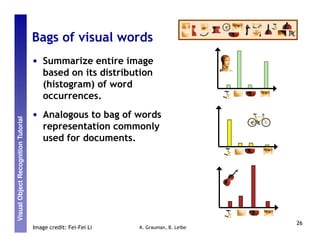
![Sampling strategies
Visual Object Recognition Tutorial Computing
Sparse, at
Perceptual and Sensory Augmented
Dense, uniformly Randomly
interest points
• To find specific, textured objects, sparse
sampling from interest points often more
reliable.
• Multiple complementary interest operators
offer more image coverage.
• For object categorization, dense sampling
offers better coverage.
Multiple interest
operators [See Nowak, Jurie & Triggs, ECCV 2006]
30
Image credits: F-F. Li, E. Nowak, J. Sivic K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-166-320.jpg)
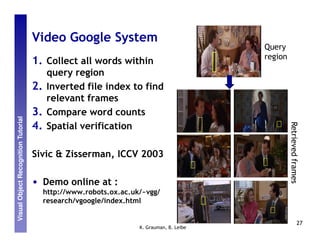
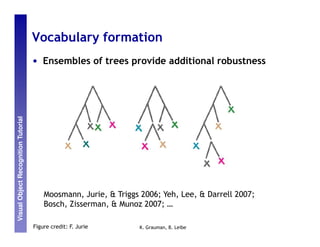
![Clustering / quantization methods
• k-means (typical choice), agglomerative clustering,
mean-shift,…
Visual Object Recognition Tutorial Computing
• Hierarchical clustering: allows faster insertion / word
assignment while still allowing large vocabularies
Perceptual and Sensory Augmented
Vocabulary tree [Nister & Stewenius, CVPR 2006]
31
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-167-320.jpg)
![Example: Recognition with Vocabulary Tree
• Tree construction:
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
[Nister & Stewenius, CVPR’06]
32
K. Grauman, B. Leibe Slide credit: David Nister](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-168-320.jpg)
![Vocabulary Tree
• Training: Filling the tree
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
[Nister & Stewenius, CVPR’06]
33
K. Grauman, B. Leibe Slide credit: David Nister](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-169-320.jpg)
![Vocabulary Tree
• Training: Filling the tree
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
[Nister & Stewenius, CVPR’06]
34
K. Grauman, B. Leibe Slide credit: David Nister](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-170-320.jpg)
![Vocabulary Tree
• Training: Filling the tree
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
[Nister & Stewenius, CVPR’06]
35
K. Grauman, B. Leibe Slide credit: David Nister](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-171-320.jpg)
![Vocabulary Tree
• Training: Filling the tree
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
[Nister & Stewenius, CVPR’06]
36
K. Grauman, B. Leibe Slide credit: David Nister](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-172-320.jpg)
![Vocabulary Tree
• Training: Filling the tree
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
[Nister & Stewenius, CVPR’06]
37
K. Grauman, B. Leibe Slide credit: David Nister](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-173-320.jpg)
![Vocabulary Tree
• Recognition
Visual Object Recognition Tutorial Computing
RANSAC
verification
Perceptual and Sensory Augmented
[Nister & Stewenius, CVPR’06]
38
K. Grauman, B. Leibe Slide credit: David Nister](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-174-320.jpg)
![Vocabulary Tree: Performance
• Evaluated on large databases
Indexing with up to 1M images
Visual Object Recognition Tutorial Computing
• Online recognition for database
of 50,000 CD covers
Perceptual and Sensory Augmented
Retrieval in ~1s
• Find experimentally that large
vocabularies can be beneficial for
recognition
[Nister & Stewenius, CVPR’06]
39
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-175-320.jpg)
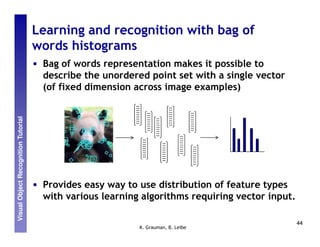
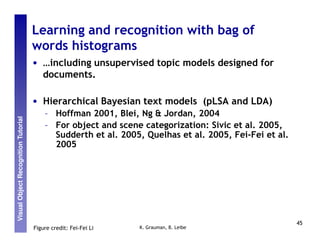
![Learning and recognition with bag of
words histograms
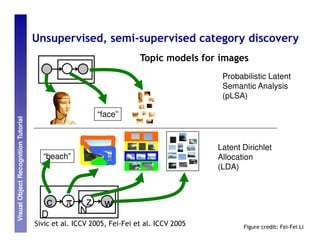
• …including unsupervised topic models designed for
documents.
Probabilistic Latent
Visual Object Recognition Tutorial Computing
Semantic Analysis
d z w (pLSA)
N
Perceptual and Sensory Augmented
D
“face”
Sivic et al. ICCV 2005
[pLSA code available at: http://www.robots.ox.ac.uk/~vgg/software/]
46
Figure credit: Fei-Fei Li K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-182-320.jpg)
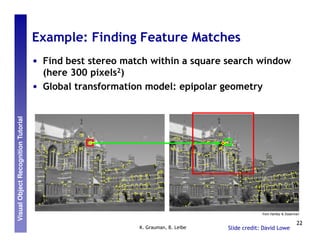
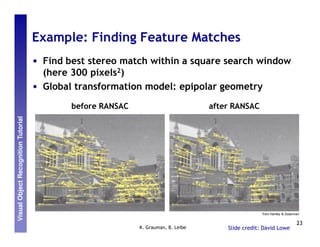
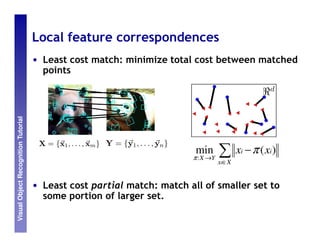
![Local feature correspondences
• The matching between sets of local features helps to
establish overall similarity between objects or shapes.
Visual Object Recognition Tutorial Computing
• Assigned matches also useful for localization
Perceptual and Sensory Augmented
Shape context Low-distortion matching [Berg & Malik 2005] Match kernel
[Belongie & [Wallraven,
Malik 2001] Caputo & Graf
2003]
4
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-188-320.jpg)
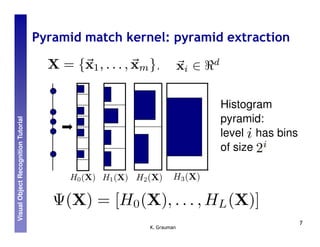
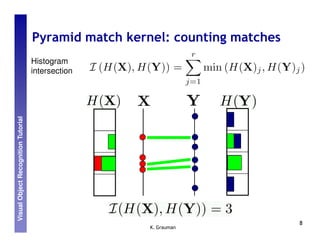
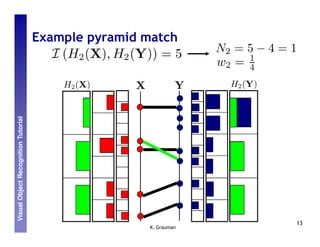
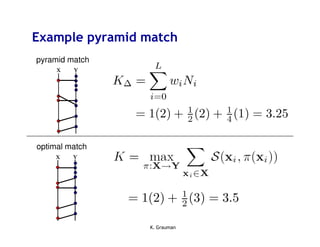
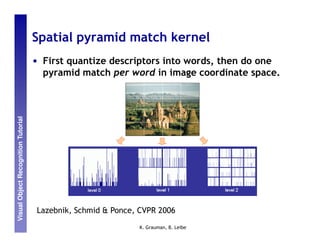
![Pyramid match kernel (PMK)
• Optimal matching expensive relative to number of
features per image (m).
Visual Object Recognition Tutorial Computing
• PMK is approximate partial match for efficient
discriminative learning from sets of local features.
Perceptual and Sensory Augmented
Optimal match: O(m3)
Greedy match: O(m2 log m)
Pyramid match: O(m)
[Grauman & Darrell, ICCV 2005]
6
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-190-320.jpg)
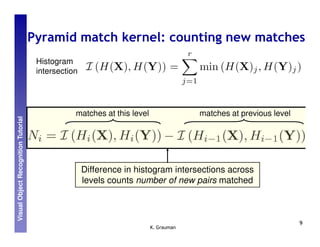
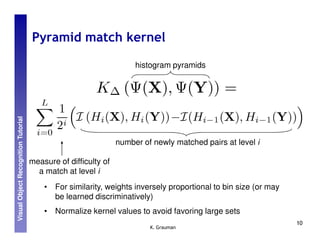
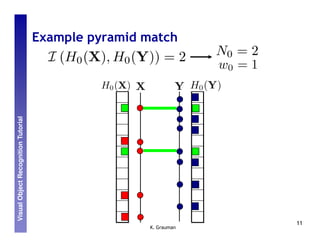
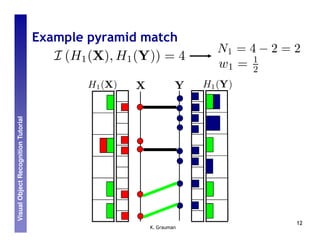
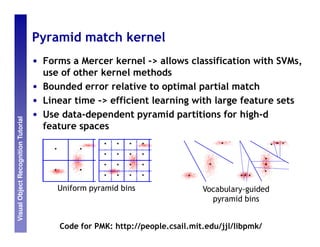
![Pyramid match kernel
• Forms a Mercer kernel -> allows classification with SVMs,
use of other kernel methods
Visual Object Recognition Tutorial Computing
• Bounded error relative to optimal partial match
• Linear time -> efficient learning with large feature sets
Perceptual and Sensory Augmented
ETH-80 data set
ETH
Accuracy
Time (s)
Mean number of features Mean number of features
Match [Wallraven et al.]
O(m2)
Pyramid match O(m)](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-200-320.jpg)
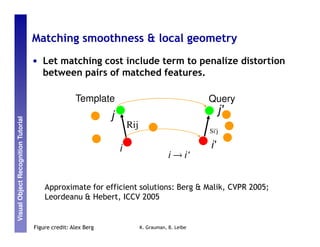
![Matching smoothness & local geometry
• Solving for linear assignment means (non-overlapping)
features can be matched independently, ignoring
Visual Object Recognition Tutorial Computing
relative geometry.
• One alternative: simply expand feature vectors to
include spatial information before matching.
Perceptual and Sensory Augmented
[ f1,…,f128, xa, ya ]
ya
xa
18
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-202-320.jpg)
![Matching smoothness & local geometry
• Use correspondence to estimate parameterized
transformation, regularize to enforce smoothness
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
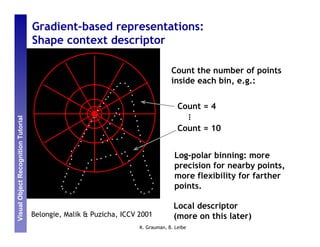
Shape context matching [Belongie, Malik, & Puzicha 2001]
Code: http://www.eecs.berkeley.edu/Research/Projects/CS/vision/shape/sc_digits.html
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-204-320.jpg)
![Matching smoothness & local geometry
• Compare “semi-local” features: consider configurations
or neighborhoods and co-occurrence relationships
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
Correlograms of Proximity
visual words distribution kernel
[Savarese, Winn, & [Ling & Soatto, ICCV Hyperfeatures: Agarwal &
Criminisi, CVPR 2006] 2007] Triggs, ECCV 2006]
Feature neighborhoods [Sivic Tiled neighborhood [Quack, Ferrari,
& Zisserman, CVPR 2004] Leibe, van Gool ICCV 2007]
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-206-320.jpg)
![Matching smoothness & local geometry
• Learn or provide explicit object-specific shape model
[Next in the tutorial : part-based models]
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
x1
x6 x2
x5 x3
x4](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-207-320.jpg)
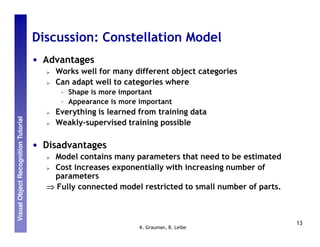
![Different Connectivity Structures
Visual Object Recognition Tutorial Computing
O(N6) O(N2) O(N3) O(N2)
Fergus et al. ’03 Leibe et al. ’04, ‘08 Crandall et al. ‘05 Felzenszwalb &
Perceptual and Sensory Augmented
Fei-Fei et al. ‘03 Crandall et al. ‘05 Huttenlocher ‘05
Fergus et al. ’05
Csurka ’04 Bouchard & Triggs ‘05 Carneiro & Lowe ‘06
Vasconcelos ‘00
5
K. Grauman, B. Leibe from [Carneiro & Lowe, ECCV’06]](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-214-320.jpg)
![Implicit Shape Model - Recognition
Interest Points Matched Codebook Probabilistic
Entries Voting
Visual Object Recognition Tutorial Computing
y
Perceptual and Sensory Augmented
Image Feature Interpretation Object
(Codebook match) Position
s
x
3D Voting Space
(continuous)
f Ci o,x
p(Ci f ) p(on , x Ci , l)
p(on , x f , l) = ∑ p (Ci f ) p (on , x Ci , l)
i
[Leibe04, Leibe08] 21](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-227-320.jpg)
![Implicit Shape Model - Recognition
Interest Points Matched Codebook Probabilistic
Entries Voting
Visual Object Recognition Tutorial Computing
y
Perceptual and Sensory Augmented
s
x
3D Voting Space
(continuous)
Backprojected Backprojection
Hypotheses of Maxima
[Leibe04, Leibe08] 22](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-228-320.jpg)
![ISM – Top-Down Segmentation
Interest Points Matched Codebook Probabilistic
Entries Voting
Visual Object Recognition Tutorial Computing
y
Perceptual and Sensory Augmented
s
x
3D Voting Space
Segmentation (continuous)
p(figure) Backprojected Backprojection
Probabilities Hypotheses of Maxima
K. Grauman, B. Leibe
[Leibe04, Leibe08] 37](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-240-320.jpg)
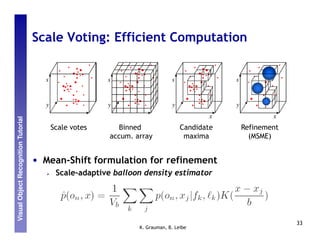
![Segmentation: Probabilistic Formulation
Visual Object Recognition Tutorial Computing
• Influence of patch on object hypothesis (vote weight)
Perceptual and Sensory Augmented
p( f , l o , x ) =
∑ p(o , x | C ) p(C
i n i i | f ) p( f,l )
n
p(on , x )
• Backprojection to features f and pixels p:
p(p = figure | on , x ) = ∑ p(p = figure | f , l, o , x ) p( f , l | o , x )
n n
p∈( f ,l )
Segmentation Influence on
information object hypothesis
38
K. Grauman, B. Leibe [Leibe04, Leibe08]](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-241-320.jpg)
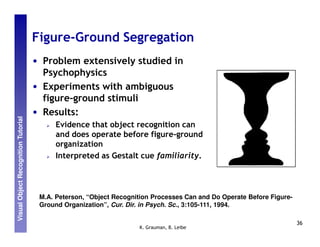
![Segmentation
Visual Object Recognition Tutorial Computing
p(figure)
Perceptual and Sensory Augmented
Original image Segmentation
p(figure)
p(ground)
p(ground)
• Interpretation of p(figure) map
per-pixel confidence in object hypothesis
Use for hypothesis verification
46
K. Grauman, B. Leibe [Leibe04, Leibe08]](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-242-320.jpg)
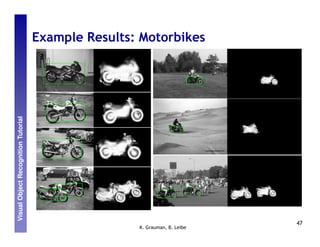
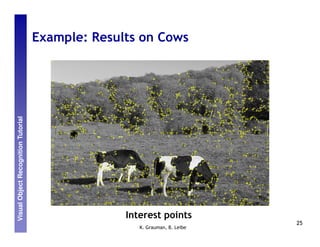
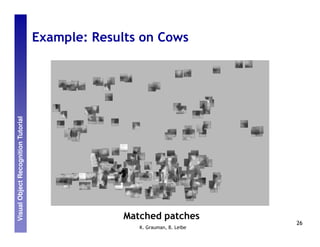
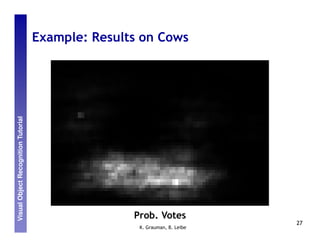
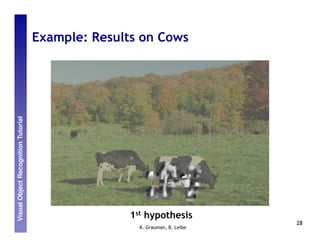
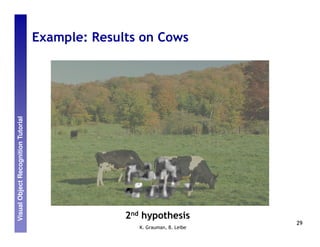
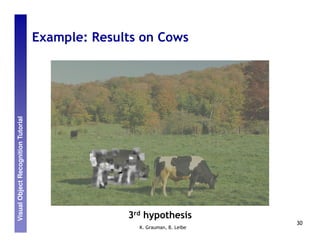
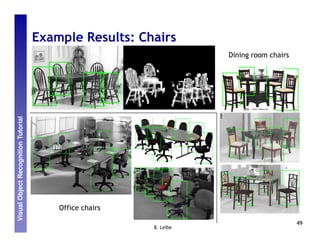
![Example Results: Cows
• Training
112 hand-segmented images
Visual Object Recognition Tutorial Computing
• Results on novel sequences:
Perceptual and Sensory Augmented
Single-frame recognition - No temporal continuity used!
48
K. Grauman, B. Leibe [Leibe04, Leibe08]](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-244-320.jpg)
![Perceptual and Sensory Augmented
Visual Object Recognition Tutorial Computing
Training
Test
Output
Inferring Other Information: Part Labels
[Thomas07]
50](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-246-320.jpg)
![Perceptual and Sensory Augmented
Visual Object Recognition Tutorial Computing
[Thomas07]
Inferring Other Information: Part Labels (2)
51](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-247-320.jpg)
![Inferring Other Information: Depth Maps
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
“Depth from a single image”
52
[Thomas07]](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-248-320.jpg)
![Application for Pedestrian Detection
• Estimating Articulation
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
[Leibe, Seemann, Schiele, CVPR’05]
• Rotation-Invariant Detection
d dq
φ
φ
θq
θ
[Mikolajczyk, Leibe, Schiele, CVPR’06]
53
B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-249-320.jpg)


![Multi-Aspect Recognition
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
[Hoiem, Rother, Winn, CVPR’07] [Thomas et al., CVPR’06]
12
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-262-320.jpg)
![Multi-Aspect Recognition
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
[Rothganger et al., CVPR’03]
[Savarese & Fei-Fei, ICCV’07]
13
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-263-320.jpg)
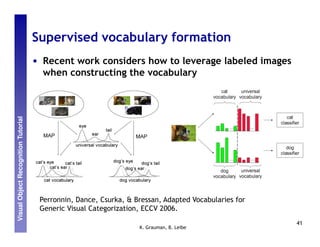
![Extensions
• Combination with 3D Geometry
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
[Leibe, Cornelis, Cornelis, Van Gool, CVPR’07]
• Mobile Pedestrian Detection
[Ess, Leibe, Van Gool, ICCV’07]
21
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-271-320.jpg)
![Detections Using Ground Plane Constraints
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
left camera
1175 frames
22
B. Leibe [Leibe et al. CVPR’07]](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-272-320.jpg)
![Extensions: Tracking-by-Detection
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
• Spacetime trajectory analysis
Link up detections to form physically plausible ST trajectories
Select set of ST trajectories that best explain the data
23
[Leibe et al. CVPR’07]](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-273-320.jpg)
![Perceptual and Sensory Augmented
Visual Object Recognition Tutorial Computing
B. Leibe
Dynamic Scene Analysis Results
[Leibe et al. CVPR’07]
24](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-274-320.jpg)
![Extensions (2)
• Combination 3D Reconstruction
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
[Cornelis, Leibe, Cornelis, Van Gool, 3DPVT’06]
25
K. Grauman, B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-275-320.jpg)
![Textured 3D Model
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
Original 3D Reconstruction
• Run-times
SfM + Bundle adjustment: 27-30 fps on CPU
Dense reconstruction: 36 fps on GPU
[Cornelis, Cornelis, Van Gool, CVPR’06]
26
B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-276-320.jpg)
![Improved 3D City Model
Enhancing your driving experience…
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
Original 3D Reconstruction
[Cornelis, Leibe, Cornelis, Van Gool, 3DPVT’06] 27](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-277-320.jpg)
![Perceptual and Sensory Augmented
Visual Object Recognition Tutorial Computing
Mobile Pedestrian Tracking
[Ess, Leibe, Schindler, Van Gool, CVPR’08]
29](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-279-320.jpg)
![Perceptual and Sensory Augmented
Visual Object Recognition Tutorial Computing
Mobile Tracking Through Crowds
[Ess, Leibe, Schindler, Van Gool, CVPR’08]
30](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-280-320.jpg)
![Extension: Recovering Articulations
1...N
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
• Idea: Only perform articulated tracking where it’s easy!
• Multi-person tracking
Solves hard data association problem
• Articulated tracking
Only on individual “tracklets” between occlusions
[Gammeter, Ess, Jaeggli, Schindler, Leibe, Van Gool, ECCV’08]
31
B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-281-320.jpg)
![Articulated Multi-Person Tracking
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
• Multi-Person tracking
Recovers trajectories and solves data association
Estimates 3D walking direction and speed
Detects occlusion events
[Gammeter, Ess, Jaeggli, Schindler, Leibe, Van Gool, ECCV’08]
32
B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-282-320.jpg)
![Articulated Tracking under Egomotion
Visual Object Recognition Tutorial Computing
Perceptual and Sensory Augmented
[Gammeter, Ess, Jaeggli, Schindler, Leibe, Van Gool, ECCV’08]
33
B. Leibe](https://image.slidesharecdn.com/full-110408013247-phpapp02/85/AAAI08-tutorial-visual-object-recognition-283-320.jpg)