Downloaded 54 times

![Метод SURF
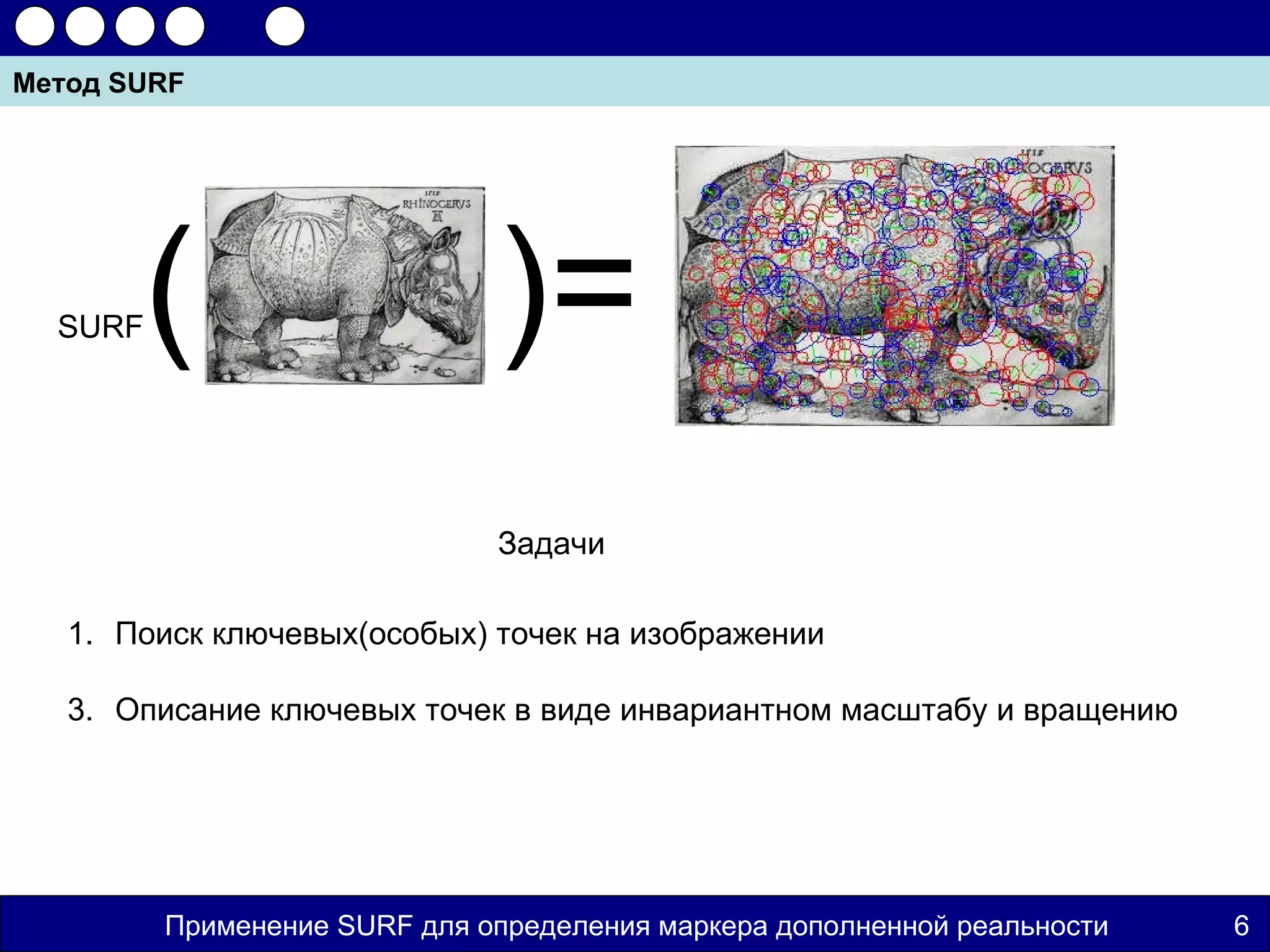
Как работает метод SURF[1]
• Ищем ключевые точки при помощи матрицы Гессе*
• Для каждой ключевой точки считается направление максимального
изменения яркости
• Перебираем масштабы матрицы Гессе по октавам.
• Формируем дескрипторы.
Дескриптор представляет собой набор из 64(либо 128) чисел для каждой
ключевой точки.
*Гессиан инвариантен ко вращению и не инвариантен к масштабированию[2]
Применение SURF для определения маркера дополненной реальности 8](https://image.slidesharecdn.com/convert-120531005206-phpapp01/75/SURF-8-2048.jpg)
![Метод SURF
Применение Гессиана[3]
Применение SURF для определения маркера дополненной реальности 9](https://image.slidesharecdn.com/convert-120531005206-phpapp01/75/SURF-9-2048.jpg)
![Метод SURF
Белые = +1, Черные = -2 (на 3м -1), серые = 0 [1-3]
Коэффициент 0.9 – приближает к Лаплассиану Гаусиан
Допустимые размеры этого фильтра таковы:
9, 15, 21, 27 и так далее, с шагом 6
Применение SURF для определения маркера дополненной реальности 10](https://image.slidesharecdn.com/convert-120531005206-phpapp01/75/SURF-10-2048.jpg)
![Метод SURF
Масштабирование. Октавы
Здесь видно несколько локальных
максимумов в разных масштабах [3]
Октава[1,2].
Выбор октав?
Предложение разработчиков
на графике.
Применение SURF для определения маркера дополненной реальности 11](https://image.slidesharecdn.com/convert-120531005206-phpapp01/75/SURF-11-2048.jpg)
![Метод SURF
Нахождение градиента
Фильтр Хаара[1]
Угловое окно [1]
Проблема шума [1]
Применение SURF для определения маркера дополненной реальности 12](https://image.slidesharecdn.com/convert-120531005206-phpapp01/75/SURF-12-2048.jpg)
![Метод SURF
Расчет дескрипторов [2,3]
1) прямоугольная область размером 20s,
2) Для первой октавы, область имеет размер
40x40 пикселов.
3) Квадрат ориентируется вдоль градиента
4) Дескриптор считается как описание градиента
для 16 квадрантов вокруг особой точки.
Для вычисления дескриптора особой точки, нужно вычислить 25 фильтров Хаара
в каждом из 16 квадрантов
Применение SURF для определения маркера дополненной реальности 13](https://image.slidesharecdn.com/convert-120531005206-phpapp01/75/SURF-13-2048.jpg)
![Метод SURF
Поведение метода при изменении условий
80
70
60
50
40
30
20
10
0
20 25 30 35 40 45 50 55 60 65
Изменение точки поворота [3]
Применение SURF для определения маркера дополненной реальности 14](https://image.slidesharecdn.com/convert-120531005206-phpapp01/75/SURF-14-2048.jpg)
![Метод SURF
Поведение метода при изменении условий
100
90
80
70
60
50
40
30
20
10
0
2 2,5 3 3,5 4 4,5 5 5,5 6 6,5
Применение фильтра размывание [3]
Применение SURF для определения маркера дополненной реальности 15](https://image.slidesharecdn.com/convert-120531005206-phpapp01/75/SURF-15-2048.jpg)
![Метод SURF
Поведение метода при изменении условий
80
70
60
50
40
30
20
10
0
1,2 1,4 1,6 1,8 2 2,2 2,4 2,6 2,8 3
Увеличение масштаба и вращение [3]
Применение SURF для определения маркера дополненной реальности 16](https://image.slidesharecdn.com/convert-120531005206-phpapp01/75/SURF-16-2048.jpg)
![Метод SURF
Поведение метода при изменении условий
90
80
70
60
50
40
30
20
10
0
2 2,5 3 3,5 4 4,5 5 5,5 6 6,5
Уменьшение яркости [3]
Применение SURF для определения маркера дополненной реальности 17](https://image.slidesharecdn.com/convert-120531005206-phpapp01/75/SURF-17-2048.jpg)
![Метод SURF
Поведение метода при изменении условий
100
90
80
70
60
50
40
30
20
10
0
60 65 70 75 80 85 90 95 100
Сжатие JPEG [3]
Применение SURF для определения маркера дополненной реальности 18](https://image.slidesharecdn.com/convert-120531005206-phpapp01/75/SURF-18-2048.jpg)
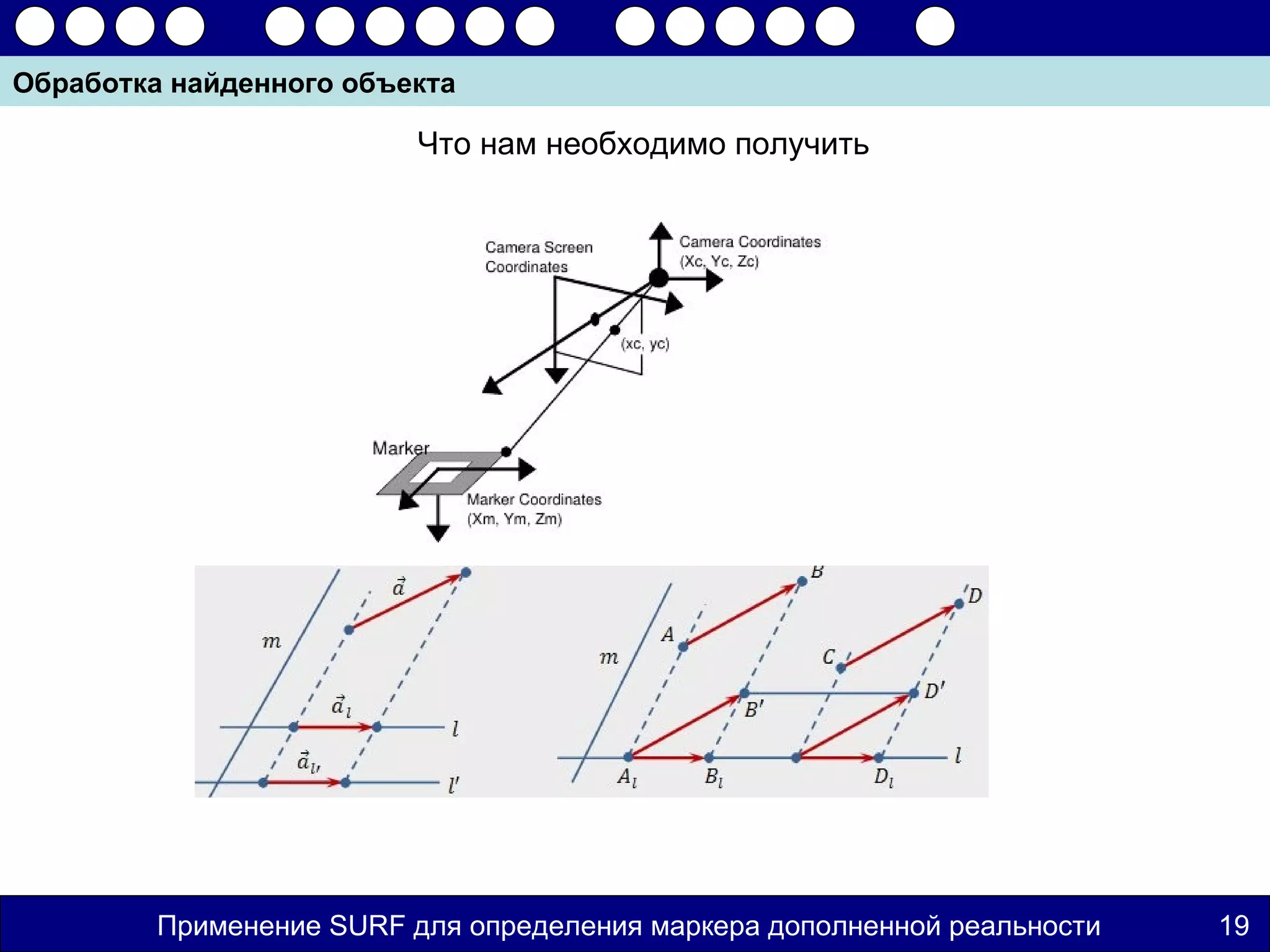
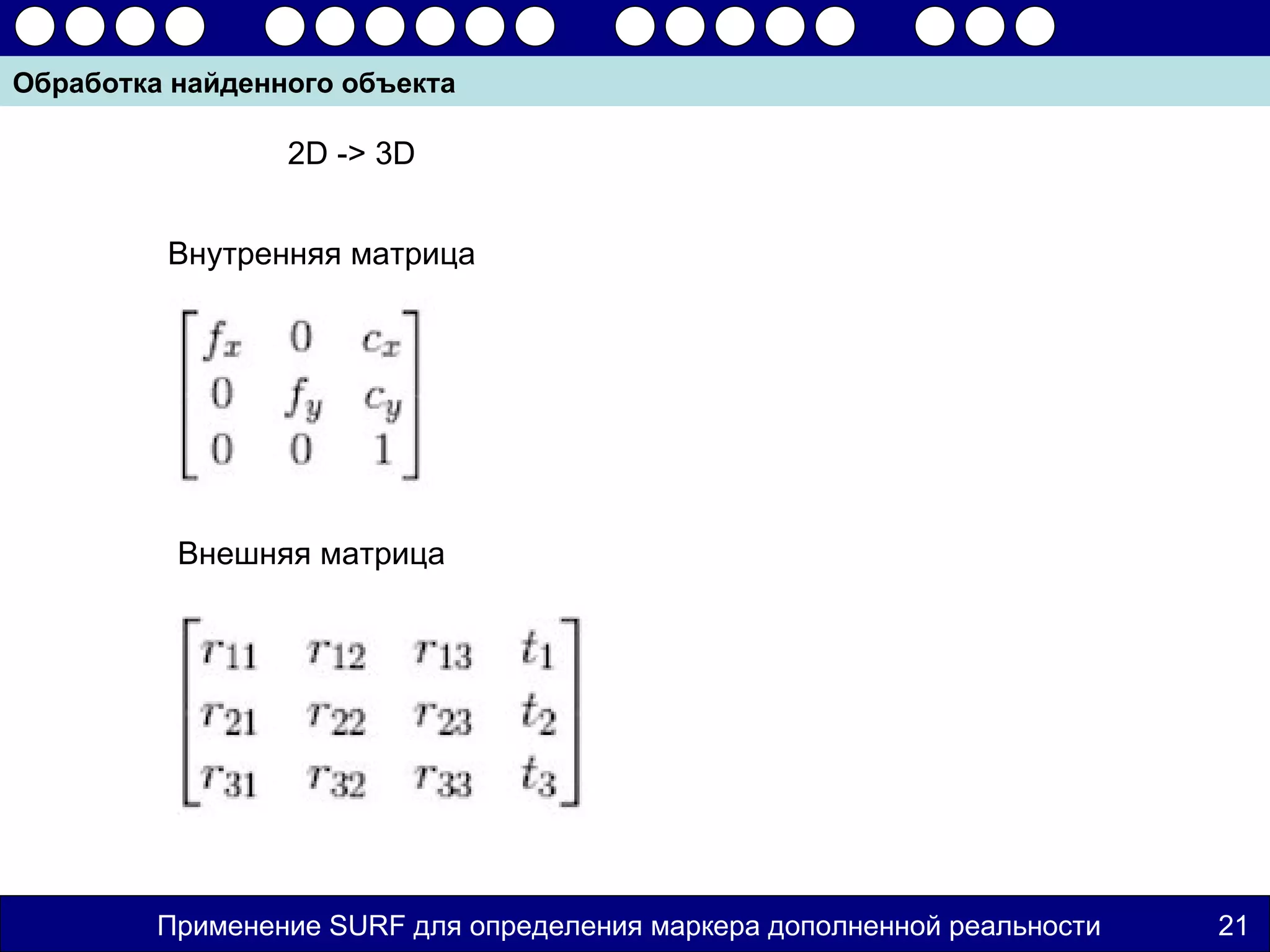
![Обработка найденного объекта
Перспективная трансформация (гомография) [7]
Применение SURF для определения маркера дополненной реальности 20](https://image.slidesharecdn.com/convert-120531005206-phpapp01/75/SURF-20-2048.jpg)

Документ описывает применение метода SURF для определения маркеров дополненной реальности, охватывая принципы работы и алгоритмы, используемые для распознавания объектов. Основное внимание уделяется поиску и описанию ключевых точек, а также особенностям обработки изображений для трекинга и идентификации объектов. В документе также обсуждаются недостатки метода и примеры его применения в различных сферах.



























