
Recommended
More Related Content
What's hot
What's hot (20)
Similar to 6. graphs of trig functions x
Similar to 6. graphs of trig functions x (20)
Recently uploaded
Recently uploaded (20)
6. graphs of trig functions x
- 1. π/2 3π/20 2π (1, π/2) One shaded period. 0 2π Graphs of Trig–Functions 0 y = csc() y = sec() y = tan() (0, 1) (2π, 1) (2π, 1) (3π/2, –1 ) (3π/2, –1 )
- 3. The records of star-positions over the years, the temperatures throughout the seasons, or one's cardiac measurements are all examples of cyclic or periodic data, Periodic Functions
- 4. The records of star-positions over the years, the temperatures throughout the seasons, or one's cardiac measurements are all examples of cyclic or periodic data, i.e. repetitive measurements having a basic block appearing at a regular interval-a period. Periodic Functions
- 5. The records of star-positions over the years, the temperatures throughout the seasons, or one's cardiac measurements are all examples of cyclic or periodic data, i.e. repetitive measurements having a basic block appearing at a regular interval-a period, Periodic Functions Given a function f(x), f(x) is periodic if there exists a nonzero number b such that f(x) = f(x + b) for all x’s,
- 6. The records of star-positions over the years, the temperatures throughout the seasons, or one's cardiac measurements are all examples of cyclic or periodic data, i.e. repetitive measurements having a basic block appearing at a regular interval-a period, Periodic Functions Given a function f(x), f(x) is periodic if there exists a nonzero number b such that f(x) = f(x + b) for all x’s, and the smallest number p > 0 where f(x) = f(x + p) is called the period of f(x).
- 7. The records of star-positions over the years, the temperatures throughout the seasons, or one's cardiac measurements are all examples of cyclic or periodic data, i.e. repetitive measurements having a basic block appearing at a regular interval-a period, Periodic Functions Given a function f(x), f(x) is periodic if there exists a nonzero number b such that f(x) = f(x + b) for all x’s, and the smallest number p > 0 where f(x) = f(x + p) is called the period of f(x). The graph of a periodic function
- 8. The records of star-positions over the years, the temperatures throughout the seasons, or one's cardiac measurements are all examples of cyclic or periodic data, i.e. repetitive measurements having a basic block appearing at a regular interval-a period, one period p Periodic Functions Given a function f(x), f(x) is periodic if there exists a nonzero number b such that f(x) = f(x + b) for all x’s, and the smallest number p > 0 where f(x) = f(x + p) is called the period of f(x). p0 The graph of a periodic function
- 9. The records of star-positions over the years, the temperatures throughout the seasons, or one's cardiac measurements are all examples of cyclic or periodic data, i.e. repetitive measurements having a basic block appearing at a regular interval-a period, one period p Periodic Functions Given a function f(x), f(x) is periodic if there exists a nonzero number b such that f(x) = f(x + b) for all x’s, and the smallest number p > 0 where f(x) = f(x + p) is called the period of f(x). x x+p For all x’s, f(x) = f(x+p) p p0 The graph of a periodic function
- 10. The records of star-positions over the years, the temperatures throughout the seasons, or one's cardiac measurements are all examples of cyclic or periodic data, i.e. repetitive measurements having a basic block appearing at a regular interval-a period, one period p Periodic Functions Given a function f(x), f(x) is periodic if there exists a nonzero number b such that f(x) = f(x + b) for all x’s, and the smallest number p > 0 where f(x) = f(x + p) is called the period of f(x). Since the trig-functions are defined by positions on the unit circle, so trig-functions are periodic with periods 2π (or π). x x+p For all x’s, f(x) = f(x+p) p p0 The graph of a periodic function
- 11. Graphs of Trig–Functions The graph of y = sin(θ)
- 12. Graphs of Trig–Functions The graph of y = sin(θ) An ant, starting from the point (1, 0) runs counter- clockwise around the unit circle. (1, 0)
- 13. Graphs of Trig–Functions The graph of y = sin(θ) An ant, starting from the point (1, 0) runs counter- clockwise around the unit circle. The arc-distance it covered is the radian measurement of the angle θ as shown (1, 0)
- 14. Graphs of Trig–Functions The graph of y = sin(θ) An ant, starting from the point (1, 0) runs counter- clockwise around the unit circle. The arc-distance it covered is the radian measurement of the angle θ as shown θ (x, y) (1, 0) θ
- 15. Graphs of Trig–Functions The graph of y = sin(θ) An ant, starting from the point (1, 0) runs counter- clockwise around the unit circle. The arc-distance it covered is the radian measurement of the angle θ as shown θ (x, y) (1, 0) θ θ θ
- 16. Graphs of Trig–Functions y An ant, starting from the point (1, 0) runs counter- clockwise around the unit circle. The arc-distance it covered is the radian measurement of the angle θ as shown and sin(θ) = y = the height of the ant’s position. θ (x, y) (1, 0) θ The graph of y = sin(θ) θ θ
- 17. Graphs of Trig–Functions The graph of y = sin(θ) An ant, starting from the point (1, 0) runs counter- clockwise around the unit circle. The arc-distance it covered is the radian measurement of the angle θ as shown and sin(θ) = y = the height of the ant’s position. By plotting the points (θ, y=sin(θ)), θθ (x, y) yy (1, 0) θ θ
- 18. Graphs of Trig–Functions The graph of y = sin(θ) An ant, starting from the point (1, 0) runs counter- clockwise around the unit circle. The arc-distance it covered is the radian measurement of the angle θ as shown and sin(θ) = y = the height of the ant’s position. By plotting the points (θ, y=sin(θ)), θθ (x, y) yy (1, 0) θ θ
- 19. Graphs of Trig–Functions The graph of y = sin(θ) An ant, starting from the point (1, 0) runs counter- clockwise around the unit circle. The arc-distance it covered is the radian measurement of the angle θ as shown and sin(θ) = y = the height of the ant’s position. By plotting the points (θ, y=sin(θ)), θθ (x, y) yy (1, 0) θ θ
- 20. Graphs of Trig–Functions The graph of y = sin(θ) An ant, starting from the point (1, 0) runs counter- clockwise around the unit circle. The arc-distance it covered is the radian measurement of the angle θ as shown and sin(θ) = y = the height of the ant’s position. By plotting the points (θ, y=sin(θ)), θθ π 2 (x, y) yy (1, 0) θ θ
- 21. Graphs of Trig–Functions The graph of y = sin(θ) An ant, starting from the point (1, 0) runs counter- clockwise around the unit circle. The arc-distance it covered is the radian measurement of the angle θ as shown and sin(θ) = y = the height of the ant’s position. By plotting the points (θ, y=sin(θ)), θθ π 2 π (x, y) yy (1, 0) θ θ
- 22. Graphs of Trig–Functions The graph of y = sin(θ) An ant, starting from the point (1, 0) runs counter- clockwise around the unit circle. The arc-distance it covered is the radian measurement of the angle θ as shown and sin(θ) = y = the height of the ant’s position. By plotting the points (θ, y=sin(θ)), θθ π 2 π 2π (x, y) yy (1, 0) θ θ
- 23. Graphs of Trig–Functions The graph of y = sin(θ) An ant, starting from the point (1, 0) runs counter- clockwise around the unit circle. The arc-distance it covered is the radian measurement of the angle θ as shown and sin(θ) = y = the height of the ant’s position. By plotting the points (θ, y=sin(θ)), θθ π 2 π 2π (x, y) yy (1, 0) θ θ
- 24. Graphs of Trig–Functions The graph of y = sin(θ) An ant, starting from the point (1, 0) runs counter- clockwise around the unit circle. The arc-distance it covered is the radian measurement of the angle θ as shown and sin(θ) = y = the height of the ant’s position. By plotting the points (θ, y=sin(θ)), we obtain the undulating sine wave as shown. θθ π 2 π 2π (x, y) yy (1, 0) θ θ
- 25. Graphs of Trig–Functions The graph of y = sin(θ) An ant, starting from the point (1, 0) runs counter- clockwise around the unit circle. The arc-distance it covered is the radian measurement of the angle θ as shown and sin(θ) = y = the height of the ant’s position. By plotting the points (θ, y=sin(θ)), we obtain the undulating sine wave as shown. Here are the important properties of the sine wave. θθ π 2 π 2π (x, y) yy (1, 0) θ θ
- 26. Properties of y = sin(θ) Graphs of Trig–Functions
- 27. Properties of y = sin(θ) 1. It’s periodic with period 2π and | sin(θ) | ≤ 1 for all θ. Graphs of Trig–Functions 0 π 2π–π–2π 3π–3π y = 1 y = –1
- 28. 2. sin(θ) = 0 for θ = .., –2π, –π, 0, π, 2π.. or θ = {nπ}. Properties of y = sin(θ) 1. It’s periodic with period 2π and | sin(θ) | ≤ 1 for all θ. Graphs of Trig–Functions 0 π 2π–π–2π 3π–3π sin(θ) = 0 for θ = {nπ} y = 1 y = –1
- 29. 2. sin(θ) = 0 for θ = .., –2π, –π, 0, π, 2π.. or θ = {nπ}. Properties of y = sin(θ) 1. It’s periodic with period 2π and | sin(θ) | ≤ 1 for all θ. Graphs of Trig–Functions 0 π 2π–π–2π 3π–3π sin(θ) = 0 for θ = {nπ} y = 1 y = –1 The ant is on the x-axis if sin(θ) = 0 and it does this twice for every cycle.
- 30. 2. sin(θ) = 0 for θ = .., –2π, –π, 0, π, 2π.. or θ = {nπ}. sin(θ) = 1 for θ = .., –7π/2, –3π/2, 1π/2, 5π/2, 9π/2.. or θ = {2nπ + π/2)}. Properties of y = sin(θ) 1. It’s periodic with period 2π and | sin(θ) | ≤ 1 for all θ. sin(θ) =1 for θ = {π/2+2nπ)} Graphs of Trig–Functions 0 π 2π–π–2π 3π–3π sin(θ) = 0 for θ = {nπ} y = 1 y = –1
- 31. 2. sin(θ) = 0 for θ = .., –2π, –π, 0, π, 2π.. or θ = {nπ}. sin(θ) = 1 for θ = .., –7π/2, –3π/2, 1π/2, 5π/2, 9π/2.. or θ = {2nπ + π/2)}. Properties of y = sin(θ) 1. It’s periodic with period 2π and | sin(θ) | ≤ 1 for all θ. sin(θ) =1 for θ = {π/2+2nπ)} Graphs of Trig–Functions 0 π 2π–π–2π 3π–3π sin(θ) = 0 for θ = {nπ} y = 1 y = –1 The ant is at the apex if sin(θ) = 1 and it does this once every round.
- 32. 2. sin(θ) = 0 for θ = .., –2π, –π, 0, π, 2π.. or θ = {nπ}. sin(θ) = 1 for θ = .., –7π/2, –3π/2, 1π/2, 5π/2, 9π/2.. or θ = {2nπ + π/2)}. sin(θ) = –1 for θ = .., –9π/2, –5π/2, –1π/2, 3π/2, 7π/2,.. or θ = {2nπ – π/2)}. Properties of y = sin(θ) 1. It’s periodic with period 2π and | sin(θ) | ≤ 1 for all θ. sin(θ) =1 for θ = {π/2+2nπ)} Graphs of Trig–Functions 0 π 2π–π–2π 3π–3π sin(θ) = –1 for θ = {–π/2+2nπ)} sin(θ) = 0 for θ = {nπ} y = 1 y = –1
- 33. 2. sin(θ) = 0 for θ = .., –2π, –π, 0, π, 2π.. or θ = {nπ}. sin(θ) = 1 for θ = .., –7π/2, –3π/2, 1π/2, 5π/2, 9π/2.. or θ = {2nπ + π/2)}. sin(θ) = –1 for θ = .., –9π/2, –5π/2, –1π/2, 3π/2, 7π/2,.. or θ = {2nπ – π/2)}. Properties of y = sin(θ) 1. It’s periodic with period 2π and | sin(θ) | ≤ 1 for all θ. sin(θ) =1 for θ = {π/2+2nπ)} Graphs of Trig–Functions 0 π 2π–π–2π 3π–3π sin(θ) = –1 for θ = {–π/2+2nπ)} sin(θ) = 0 for θ = {nπ} y = 1 y = –1 The ant is at the nadir if sin(θ) = 1 and it does this once every round.
- 34. 2. sin(θ) = 0 for θ = .., –2π, –π, 0, π, 2π.. or θ = {nπ}. sin(θ) = 1 for θ = .., –7π/2, –3π/2, 1π/2, 5π/2, 9π/2.. or θ = {2nπ + π/2)}. sin(θ) = –1 for θ = .., –9π/2, –5π/2, –1π/2, 3π/2, 7π/2,.. or θ = {2nπ – π/2)}. Properties of y = sin(θ) 1. It’s periodic with period 2π and | sin(θ) | ≤ 1 for all θ. sin(θ) =1 for θ = {π/2+2nπ)} 3. Sin(–θ) = –sin(θ) is odd so its graph is symmetric to the origin. Graphs of Trig–Functions 0 π 2π–π–2π 3π–3π sin(θ) = –1 for θ = {–π/2+2nπ)} sin(θ) = 0 for θ = {nπ} y = 1 y = –1
- 35. Graph of y = cos(θ) Graphs of Trig–Functions
- 36. Graph of y = cos(θ) The cosine function tracks the x-coordinates of the position of the ant as it runs around the circle. Graphs of Trig–Functions θ (1, 0) cos(θ) = x (x, y)
- 37. Graph of y = cos(θ) The cosine function tracks the x-coordinates of the position of the ant as it runs around the circle. The coordinates of (x, y) of an angle θ, after rotating 90o counter-clockwise, Graphs of Trig–Functions θ y (1, 0) cos(θ) = x (x, y) at θ A rotation of π/2 gives the identity cos(θ) = sin(θ + π/2) θ (x, y)
- 38. Graph of y = cos(θ) The cosine function tracks the x-coordinates of the position of the ant as it runs around the circle. The coordinates of (x, y) of an angle θ, after rotating 90o counter-clockwise, Graphs of Trig–Functions θ y (1, 0) cos(θ) = x (x, y) at θ A rotation of π/2 gives the identity cos(θ) = sin(θ + π/2) π θ (x, y)
- 39. Graph of y = cos(θ) The cosine function tracks the x-coordinates of the position of the ant as it runs around the circle. The coordinates of (x, y) of an angle θ, after rotating 90o counter-clockwise, become (–y, x), which is the position corresponding to the of the angle (θ + π/2). Graphs of Trig–Functions θ y (1, 0) cos(θ) = x (x, y) at θ (–y, x) at θ+π/2 A rotation of π/2 gives the identity cos(θ) = sin(θ + π/2) π θ (x, y)
- 40. Graph of y = cos(θ) The cosine function tracks the x-coordinates of the position of the ant as it runs around the circle. The coordinates of (x, y) of an angle θ, after rotating 90o counter-clockwise, become (–y, x), which is the position corresponding to the the angle (θ + π/2). So cos(θ) = sin(θ + π/2), Graphs of Trig–Functions θ y (1, 0) cos(θ) = x (x, y) at θ (–y, x) at θ+π/2 A rotation of π/2 gives the identity cos(θ) = sin(θ + π/2) π θ (x, y)
- 41. Graph of y = cos(θ) The cosine function tracks the x-coordinates of the position of the ant as it runs around the circle. The coordinates of (x, y) of an angle θ, after rotating 90o counter-clockwise, become (–y, x), which is the position corresponding to the the angle (θ + π/2). So cos(θ) = sin(θ + π/2), i.e. the graph of y = cos(θ) is the sine graph shifted left by π/2. Graphs of Trig–Functions θ y (1, 0) cos(θ) = x (x, y) at θ (–y, x) at θ+π/2 A rotation of π/2 gives the identity cos(θ) = sin(θ + π/2) π θ (x, y)
- 42. Graphs of Trig–Functions A rotation of π/2 gives that cos(θ) = sin(θ + π/2). This means the graph of y = cos(θ) is the π/2-left-shift of y = sin(θ), Graph of y = cos(θ) y = sin(θ)(π/2, 1) π (0, 0)
- 43. Graphs of Trig–Functions A rotation of π/2 gives that cos(θ) = sin(θ + π/2). This means the graph of y = cos(θ) is the π/2-left-shift of y = sin(θ), e.g. the point (π/2, 1) is shifted to (0, 1) and (0, 0) is shifted to (–π/2, 1). Graph of y = cos(θ) y = sin(θ)(π/2, 1) π (0, 0)
- 44. Graphs of Trig–Functions y = sin(θ) A rotation of π/2 gives that cos(θ) = sin(θ + π/2). This means the graph of y = cos(θ) is the π/2-left-shift of y = sin(θ), e.g. the point (π/2, 1) is shifted to (0, 1) and (0, 0) is shifted to (–π/2, 1). y = cos(θ) (π/2, 1) (0, 1) Here is the graph of y = cos(θ) after shifting sin(θ). π (0, 0) (–π/2,0) Graph of y = cos(θ) (π/2,0)
- 45. Graph of y = tan(θ) Graphs of Trig–Functions
- 46. Graph of y = tan(θ) Graphs of Trig–Functions x y (x , y) y xtan() Given an angle , tan() = is the length as shown here, which is also the slope of the dial.(1,0)
- 47. Graph of y = tan(θ) Graphs of Trig–Functions x y (x , y) y xtan() Given an angle , tan() = is the length as shown here, which is also the slope of the dial.(1,0) x y t 1 ~~
- 48. Graph of y = tan(θ) Graphs of Trig–Functions x y (x , y) y xtan() Given an angle , tan() = is the length as shown here, which is also the slope of the dial.(1,0) Tan(θ) is defined between ±π/2 but not at ±π/2. x y t 1 ~~
- 49. Graph of y = tan(θ) Graphs of Trig–Functions x y (x , y) y xtan() Given an angle , tan() = is the length as shown here, which is also the slope of the dial.(1,0) Tan(θ) is defined between ±π/2 but not at ±π/2. Specifically, as θ →π/2– , tan(θ) → ∞θ →π/2– tan(θ) → ∞ x y t 1 ~~
- 50. Graph of y = tan(θ) Graphs of Trig–Functions x y (x , y) y xtan() Given an angle , tan() = is the length as shown here, which is also the slope of the dial.(1,0) Tan(θ) is defined between ±π/2 but not at ±π/2. Specifically, as θ →π/2– , tan(θ) → ∞ as θ → –π/2+ , tan(θ) → –∞ θ →π/2– tan(θ) → ∞ θ → –π/2+ tan(θ) → –∞ x y t 1 ~~
- 51. Graph of y = tan(θ) Graphs of Trig–Functions x y (x , y) y xtan() Given an angle , tan() = is the length as shown here, which is also the slope of the dial.(1,0) Tan(θ) is defined between ±π/2 but not at ±π/2. Specifically, as θ →π/2– , tan(θ) → ∞ as θ → –π/2+ , tan(θ) → –∞ Here are some tan(θ) values: θ →π/2– tan(θ) → ∞ θ → –π/2+ tan(θ) → –∞ x y t 1 ~~ π/60 π/4 π/3 0 1/3 1 3 ∞ π/2 – θ tan(θ) 0–π/2+ 0 –π/6 –1/3 –π/4 –1 –π/3 –3–∞ tan(θ) θ
- 52. Graph of y = tan(θ) Graphs of Trig–Functions π/60 π/4 π/3 0 1/3 1 3 ∞ π/2 – θ tan(θ) 0–π/2+ 0 –π/6 –1/3 –π/4 –1 –π/3 –3–∞ tan(θ) θ x y (x , y) tan() (1,0) y = tan(θ) –π/2 π/2 0 θ Plot these points to obtain the graph of y = tan(θ).
- 53. Graph of y = tan(θ) Graphs of Trig–Functions π/60 π/4 π/3 0 1/3 1 3 ∞ π/2 – θ tan(θ) 0–π/2+ 0 –π/6 –1/3 –π/4 –1 –π/3 –3–∞ tan(θ) θ x y (x , y) tan() (1,0) y = tan(θ) –π/2 π/2 0 θ Plot these points to obtain the graph of y = tan(θ).
- 54. Graph of y = tan(θ) Graphs of Trig–Functions π/60 π/4 π/3 0 1/3 1 3 ∞ π/2 – θ tan(θ) 0–π/2+ 0 –π/6 –1/3 –π/4 –1 –π/3 –3–∞ tan(θ) θ x y (x , y) tan() (1,0) y = tan(θ) –π/2 π/2 3π/2–3π/2 0 The basic periodic interval for tan(θ) is (–π/2, π/2) with period π θ Plot these points to obtain the graph of y = tan(θ).
- 55. Graph of y = tan(θ) Graphs of Trig–Functions π/60 π/4 π/3 0 1/3 1 3 ∞ π/2 – θ tan(θ) 0–π/2+ 0 –π/6 –1/3 –π/4 –1 –π/3 –3–∞ tan(θ) θ x y (x , y) tan() (1,0) Plot these points to obtain the graph of y = tan(θ). y = tan(θ) –π/2 π/2 3π/2–3π/2 π–π 0 The basic periodic interval for tan(θ) is (–π/2, π/2) with period π and like sin(x), tan(nπ) = 0 where n is an integer. θ
- 56. Graph of y = cot(θ) Graphs of Trig–Functions x y (x , y) y x cot() Given an angle , cot() = is the length as shown here. (0, 1)
- 57. Graph of y = cot(θ) Graphs of Trig–Functions x y (x , y) y x cot() Given an angle , cot() = is the length as shown here. (0, 1) Cot(θ) is defined between 0 and π but not at 0 or π. Specifically, as θ →0+ , cot(θ) → ∞ as θ → π– , cot(θ) → –∞ θ →0 + cot(θ) →∞ θ → π– cot(θ) → –∞
- 58. Graph of y = cot(θ) Graphs of Trig–Functions x y (x , y) y x cot() Given an angle , cot() = is the length as shown here. (0, 1) Cot(θ) is defined between 0 and π but not at 0 or π. Specifically, as θ →0+ , cot(θ) → ∞ as θ → π– , cot(θ) → –∞ Here are some cot(θ) values: θ →0 + cot(θ) →∞ θ → π– cot(θ) → –∞ π/6 0+π/4π/3 0 1/3 1 3 ∞ π/2 θ cot(θ) π 0 2π/3 –1/3 3π/4 –1 5π/6 –3–∞ cot(θ) θ π/2
- 59. Graph of y = cot(θ) Graphs of Trig–Functions x y (x , y) cot()(0, 1) π/6 0+π/4π/3 0 1/3 1 3 ∞ π/2 θ cot(θ) π 0 2π/3 –1/3 3π/4 –1 5π/6 –3–∞ cot(θ) θ π/2
- 60. Graph of y = cot(θ) Graphs of Trig–Functions x y (x , y) cot()(0, 1) π/6 0+π/4π/3 0 1/3 1 3 ∞ π/2 θ cot(θ) π 0 2π/3 –1/3 3π/4 –1 5π/6 –3–∞ cot(θ) θ π/2 We’ve the graph of y = cot(θ) by plotting these points. The periodic interval of cot(θ) is (0, π), y = cot(θ) π/2 π–π 0 θ 2π
- 61. Graph of y = cot(θ) Graphs of Trig–Functions x y (x , y) cot()(0, 1) π/6 0+π/4π/3 0 1/3 1 3 ∞ π/2 θ cot(θ) π 0 2π/3 –1/3 3π/4 –1 5π/6 –3–∞ cot(θ) θ π/2 We’ve the graph of y = cot(θ) by plotting these points. The periodic interval of cot(θ) is (0, π), and like cos(θ) cot(θ) = 0 for θ = = {(2n+1)π/2} with n an integer. –π 2 , π 2 , –3π 2 , 3π 2 ,... .{ { y = cot(θ) –π/2 π/2 3π/2 π–π 0 θ 2π
- 62. Graph of y = cot(θ) Graphs of Trig–Functions x y (x , y) cot()(0, 1) π/6 0+π/4π/3 0 1/3 1 3 ∞ π/2 θ cot(θ) π 0 2π/3 –1/3 3π/4 –1 5π/6 –3–∞ cot(θ) θ π/2 We’ve the graph of y = cot(θ) by plotting these points. The periodic interval of cot(θ) is (0, π), and like cos(θ) cot(θ) = 0 for θ = = {(2n+1)π/2} with n an integer. –π 2 , π 2 , –3π 2 , 3π 2 ,... .{ { y = cot(θ) –π/2 π/2 3π/2 π–π 0 θ 2π
- 63. The reciprocal-ratios sec() = 1/cos() and csc() = 1/sin(), the "secant" and the "cosecant" of , are used in science and engineering. Graphs of Trig–Functions
- 64. The reciprocal-ratios sec() = 1/cos() and csc() = 1/sin(), the "secant" and the "cosecant" of , are used in science and engineering. Graphs of Trig–Functions Their graphs may be obtained by "reciprocating" the graphs of y = sin() and y = cos().
- 65. The reciprocal-ratios sec() = 1/cos() and csc() = 1/sin(), the "secant" and the "cosecant" of , are used in science and engineering. Graphs of Trig–Functions Their graphs may be obtained by "reciprocating" the graphs of y = sin() and y = cos(). Reciprocating Graphs
- 66. The reciprocal-ratios sec() = 1/cos() and csc() = 1/sin(), the "secant" and the "cosecant" of , are used in science and engineering. Graphs of Trig–Functions Their graphs may be obtained by "reciprocating" the graphs of y = sin() and y = cos(). Reciprocating Graphs To form the reciprocal graph of a continuous function, let's track the position (x, 1/y) from (x, y). y=1
- 67. The reciprocal-ratios sec() = 1/cos() and csc() = 1/sin(), the "secant" and the "cosecant" of , are used in science and engineering. Graphs of Trig–Functions Their graphs may be obtained by "reciprocating" the graphs of y = sin() and y = cos(). Reciprocating Graphs To form the reciprocal graph of a continuous function, let's track the position (x, 1/y) from (x, y). Points (x, y) where 0 < y < 1 are reciprocated to the top with 1/y > 1, and vice versa as shown. y=1 (x, y) (x, 1/y) (x, 1/y) (x, y) (x, y) (x, 1/y)
- 68. The reciprocal-ratios sec() = 1/cos() and csc() = 1/sin(), the "secant" and the "cosecant" of , are used in science and engineering. Graphs of Trig–Functions Their graphs may be obtained by "reciprocating" the graphs of y = sin() and y = cos(). Reciprocating Graphs To form the reciprocal graph of a continuous function, let's track the position (x, 1/y) from (x, y). Points (x, y) where 0 < y < 1 are reciprocated to the top with 1/y > 1, and vice versa as shown. The points (x, 1)’s stay fixed y=1(x, 1) (x, y) (x, 1/y) (x, 1/y) (x, y) (x, y) (x, 1/y)
- 69. The reciprocal-ratios sec() = 1/cos() and csc() = 1/sin(), the "secant" and the "cosecant" of , are used in science and engineering. Graphs of Trig–Functions Their graphs may be obtained by "reciprocating" the graphs of y = sin() and y = cos(). Reciprocating Graphs To form the reciprocal graph of a continuous function, let's track the position (x, 1/y) from (x, y). Points (x, y) where 0 < y < 1 are reciprocated to the top with 1/y > 1, and vice versa as shown. The points (x, 1)’s stay fixed and y=1 (x, y) (x, 1/y) (x, 1/y) (x, y) (x, 1) (x, y) (x, 1/y) asymptotes are formed at (x,0)’s since 1/0 is UDF. (x,0) Vertical Asymptotes
- 70. Graphs of Trig–Functions Sine is periodic so we may reciprocate one period of the sine wave to get the graph y = csc(). Reciprocating the y-coordinates
- 71. Graphs of Trig–Functions Sine is periodic so we may reciprocate one period of the sine wave to get the graph y = csc(). Reciprocating the y-coordinates π0 2π ( π/2, 1) (3π/2, –1 ) y=sin() y=csc()
- 72. Graphs of Trig–Functions Sine is periodic so we may reciprocate one period of the sine wave to get the graph y = csc(). Reciprocating the y-coordinates π0 2π ( π/2, 1) (3π/2, –1 ) y=sin() y=csc()
- 73. Graphs of Trig–Functions Sine is periodic so we may reciprocate one period of the sine wave to get the graph y = csc(). Reciprocating the y-coordinates π0 2π ( π/2, 1) (3π/2, –1 ) y=sin() y=csc() The graph of csc() is periodic with period 2π.
- 74. Graphs of Trig–Functions Sine is periodic so we may reciprocate one period of the sine wave to get the graph y = csc(). Reciprocating the y-coordinates π0 2π ( π/2, 1) (3π/2, –1 ) y=sin() y=csc() The graph of csc() is periodic with period 2π. Since cos() is the left-shift of the sin(), so the graph of sec() is the left shift of the graph of csc().
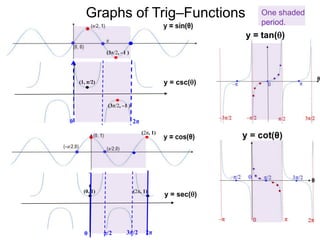
- 75. Graphs of Trig–Functions Sine is periodic so we may reciprocate one period of the sine wave to get the graph y = csc(). Reciprocating the y-coordinates π0 2π ( π/2, 1) (3π/2, –1 ) y=sin() y=csc() The graph of csc() is periodic with period 2π. Since cos() is the left-shift of the sin(), so the graph of sec() is the left shift of the graph of csc(). Here are the graphs of all six trig-functions.
- 76. π/2 3π/20 2π (1, π/2) One shaded period. 0 2π Graphs of Trig–Functions 0 y = csc() y = sec() y = tan() (0, 1) (2π, 1) (2π, 1) (3π/2, –1 ) (3π/2, –1 )