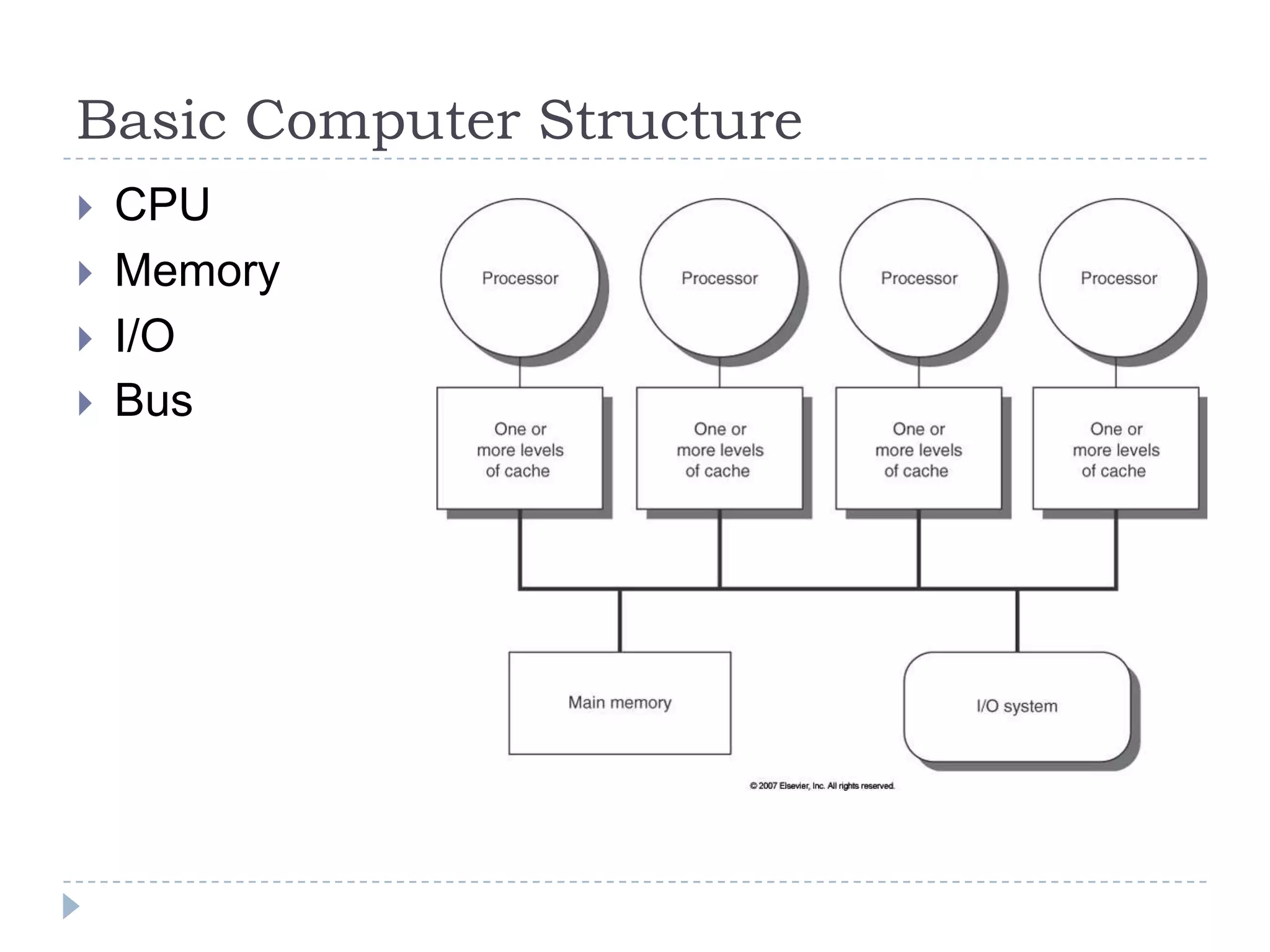
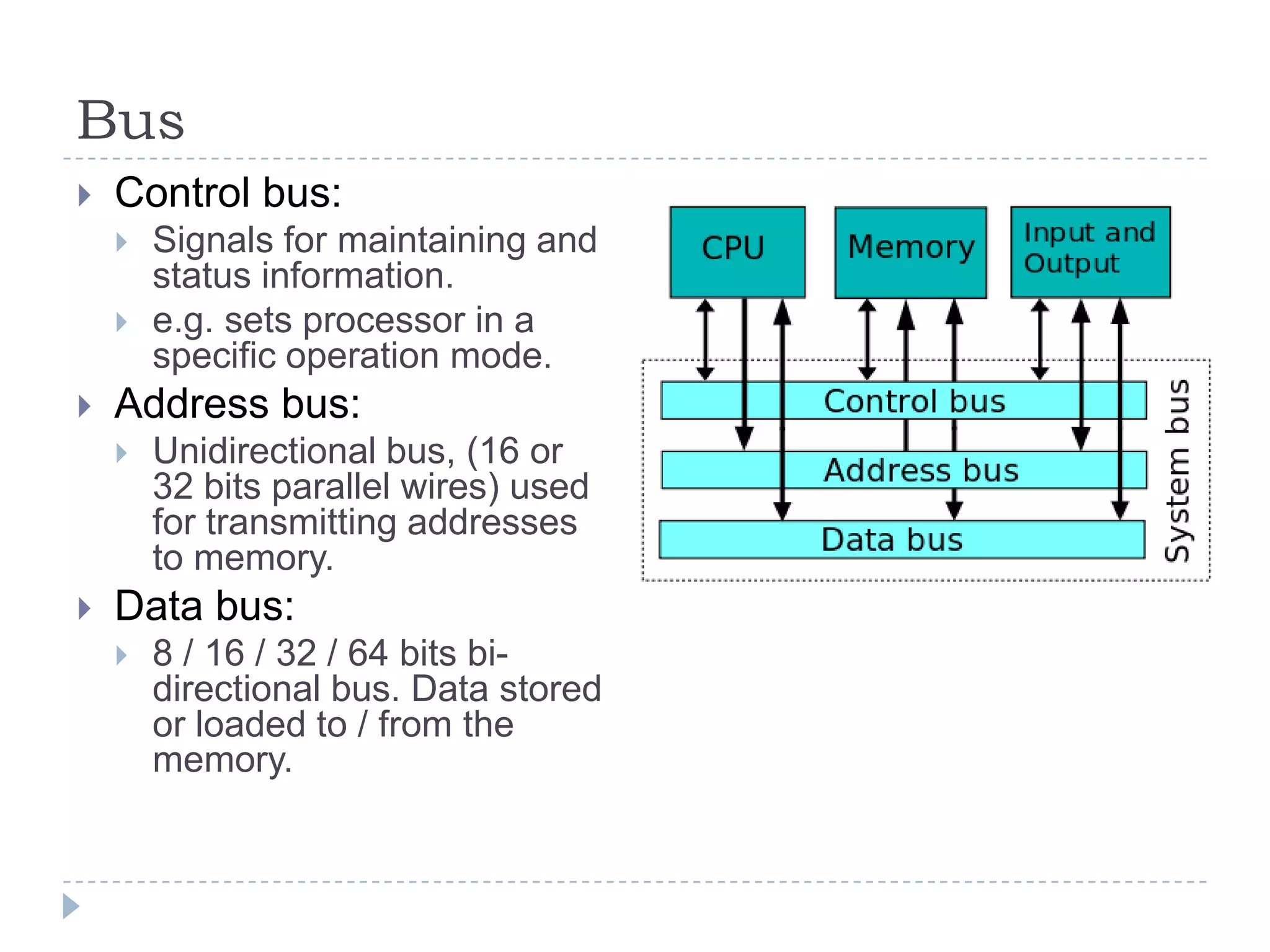
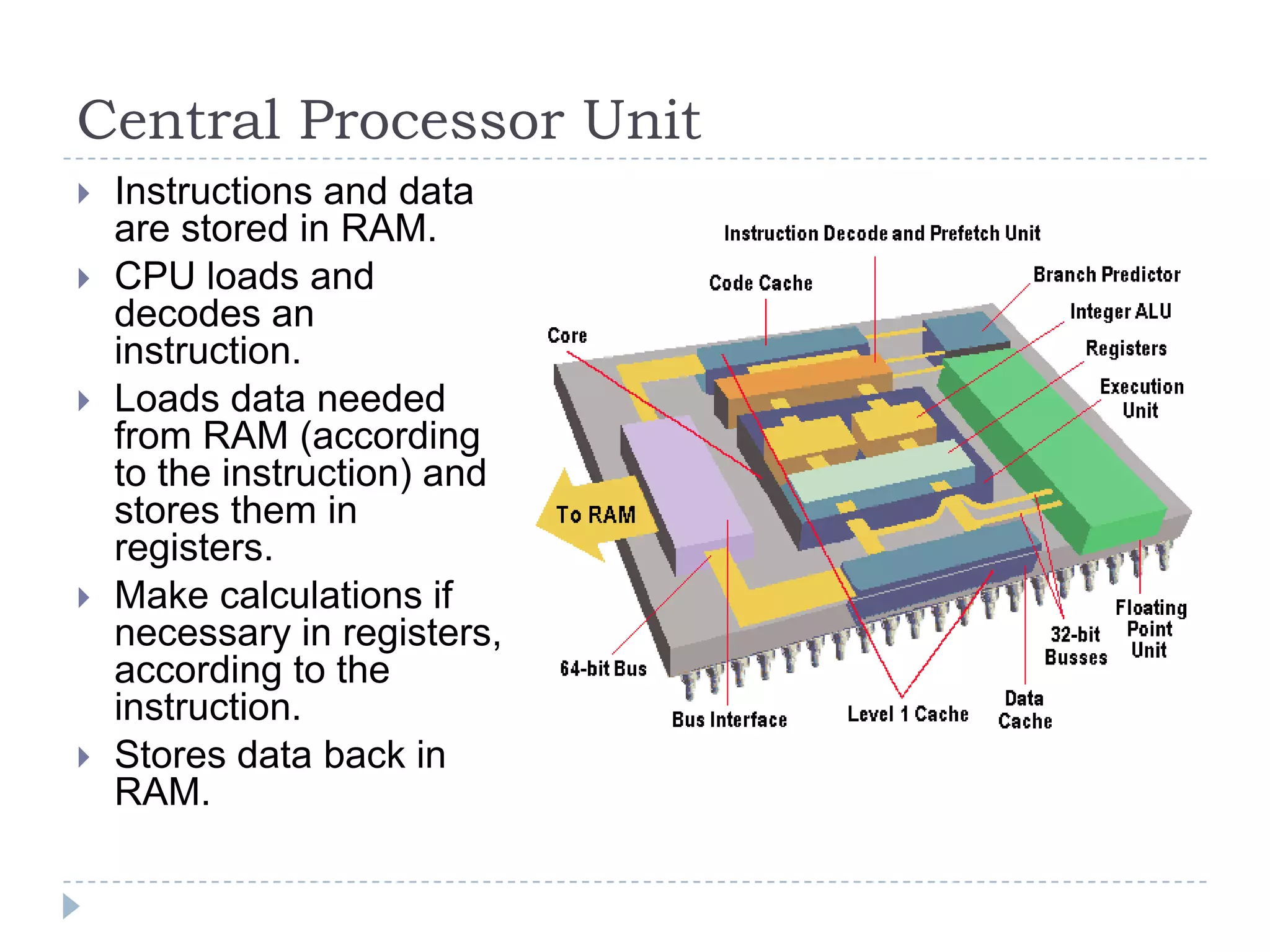
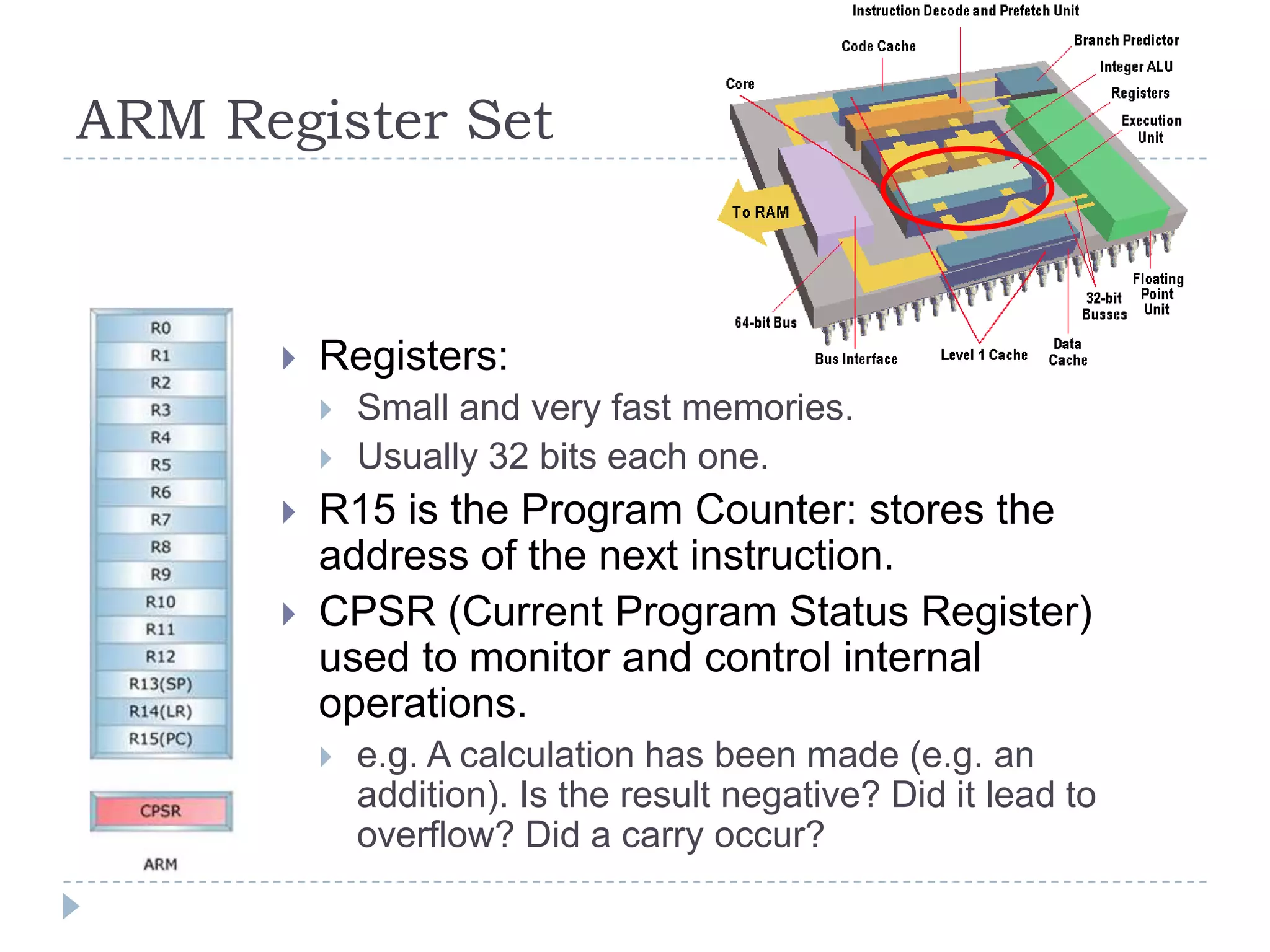
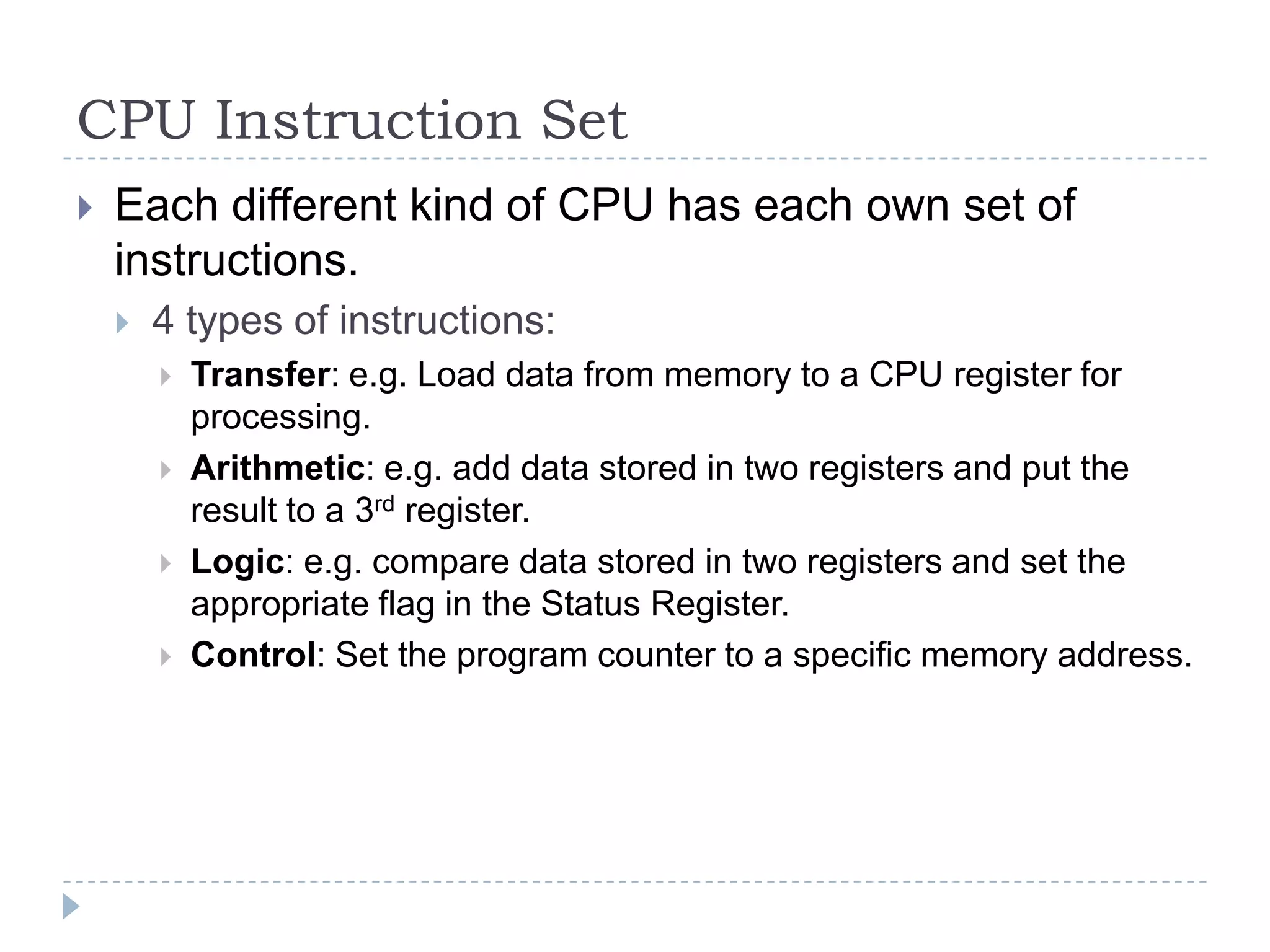
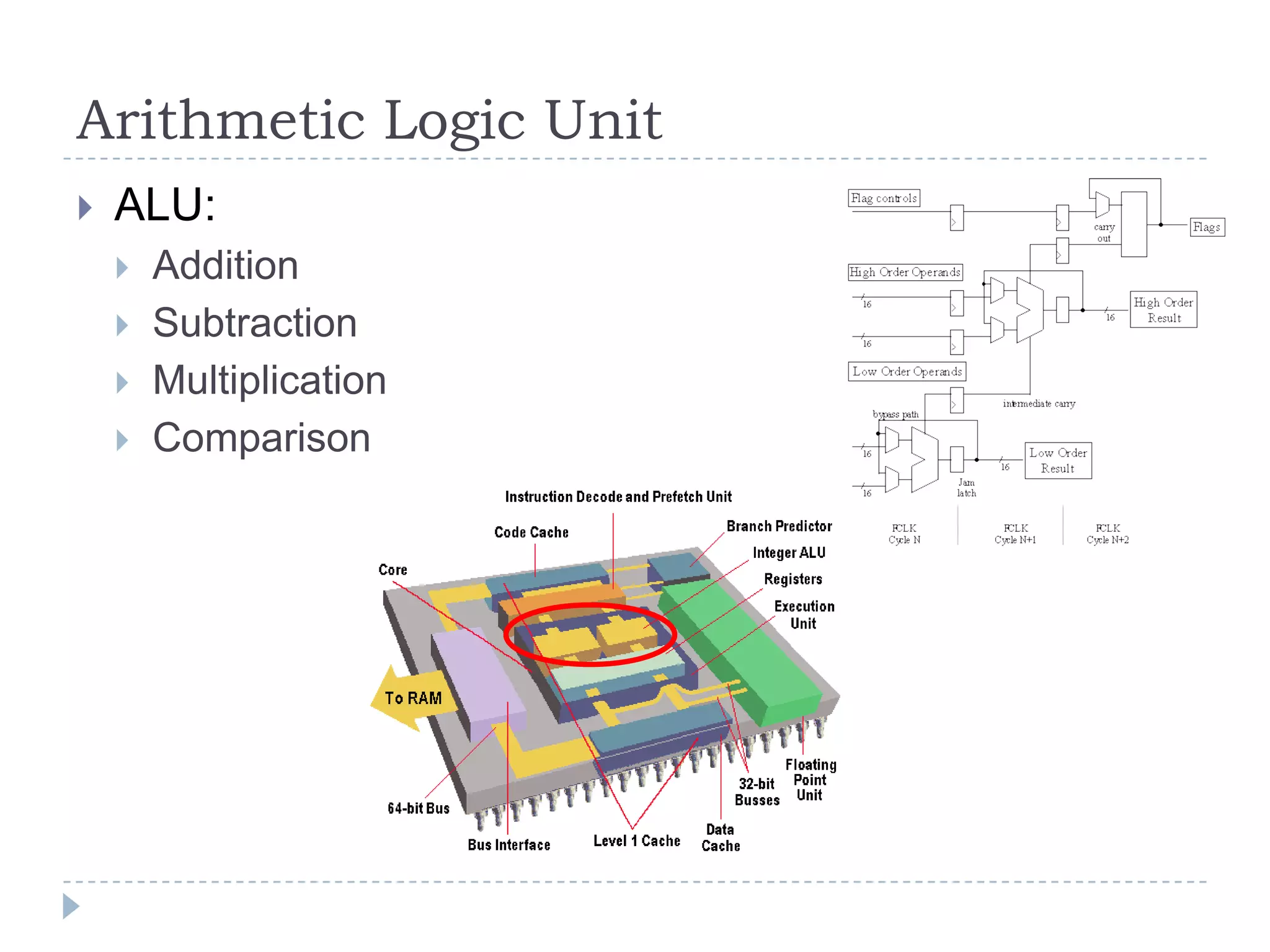
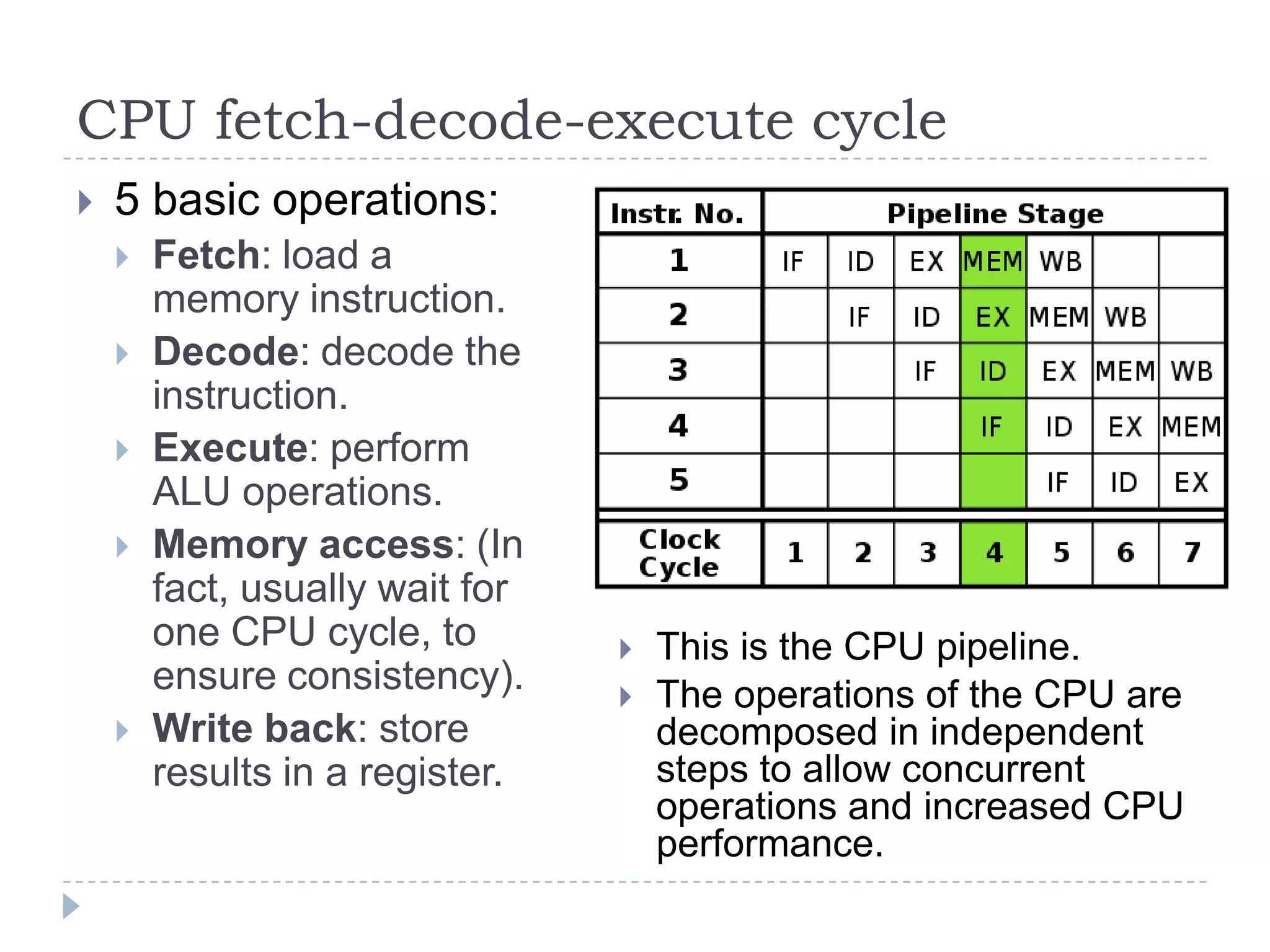
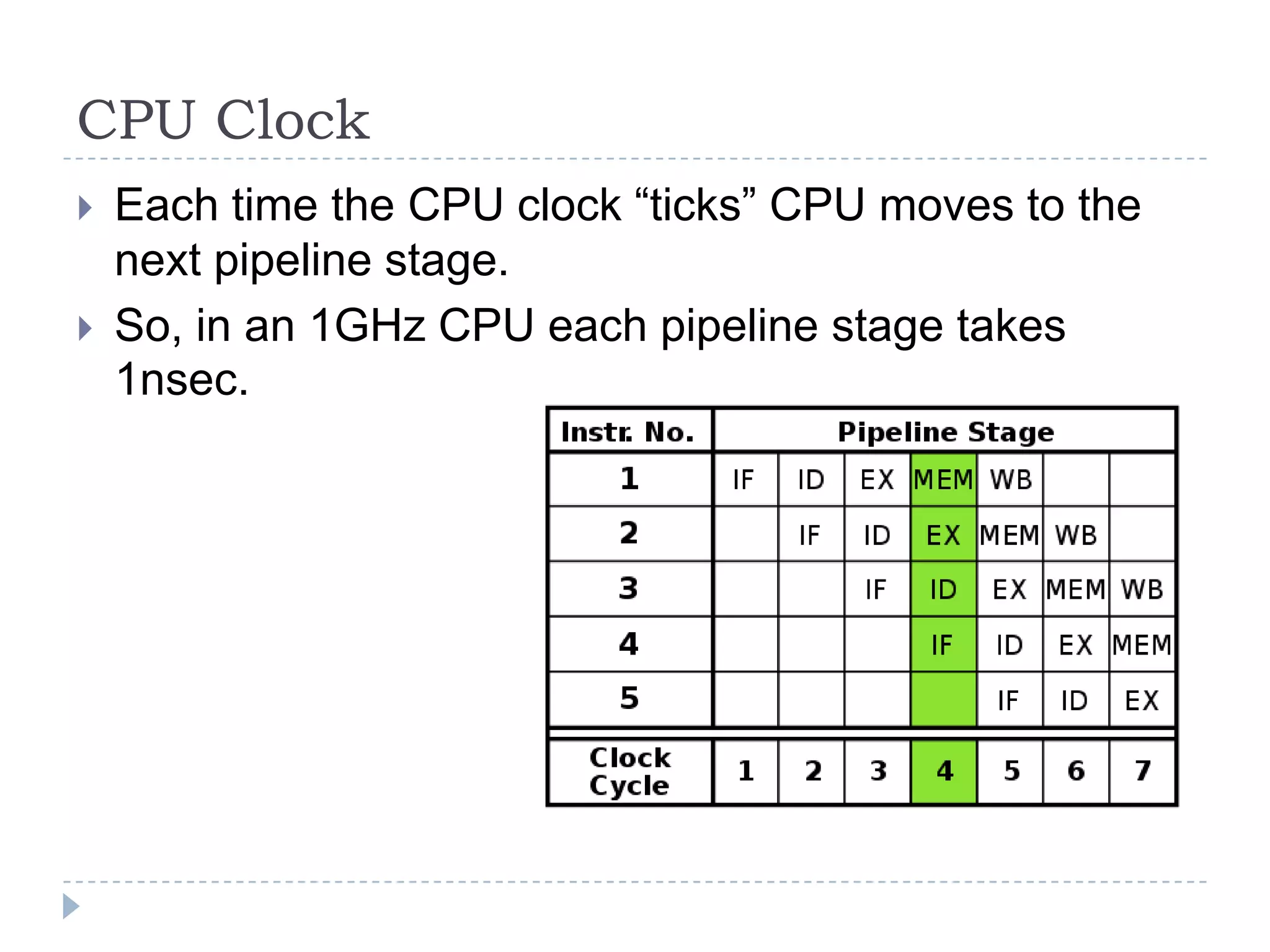
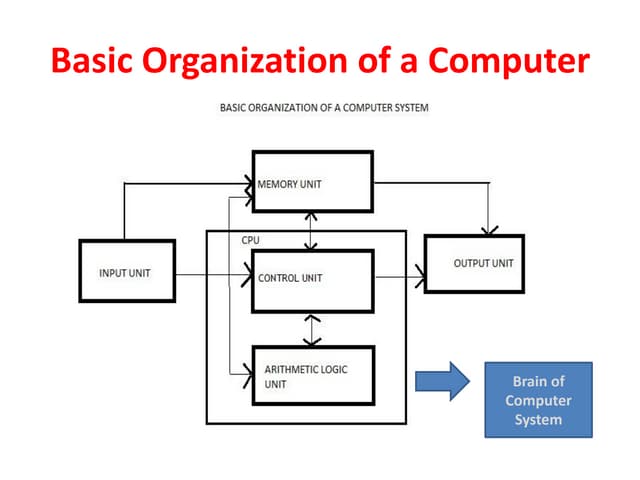
This document discusses basic computer structure and operation. It describes the main components of a CPU including registers, ALU, and control unit. It explains how the CPU fetches, decodes and executes instructions in a repeating cycle. It also discusses memory types including RAM, ROM, flash and hard disks. The document provides an overview of operating systems, programming languages, and how user input such as a keypress is processed by the computer system.