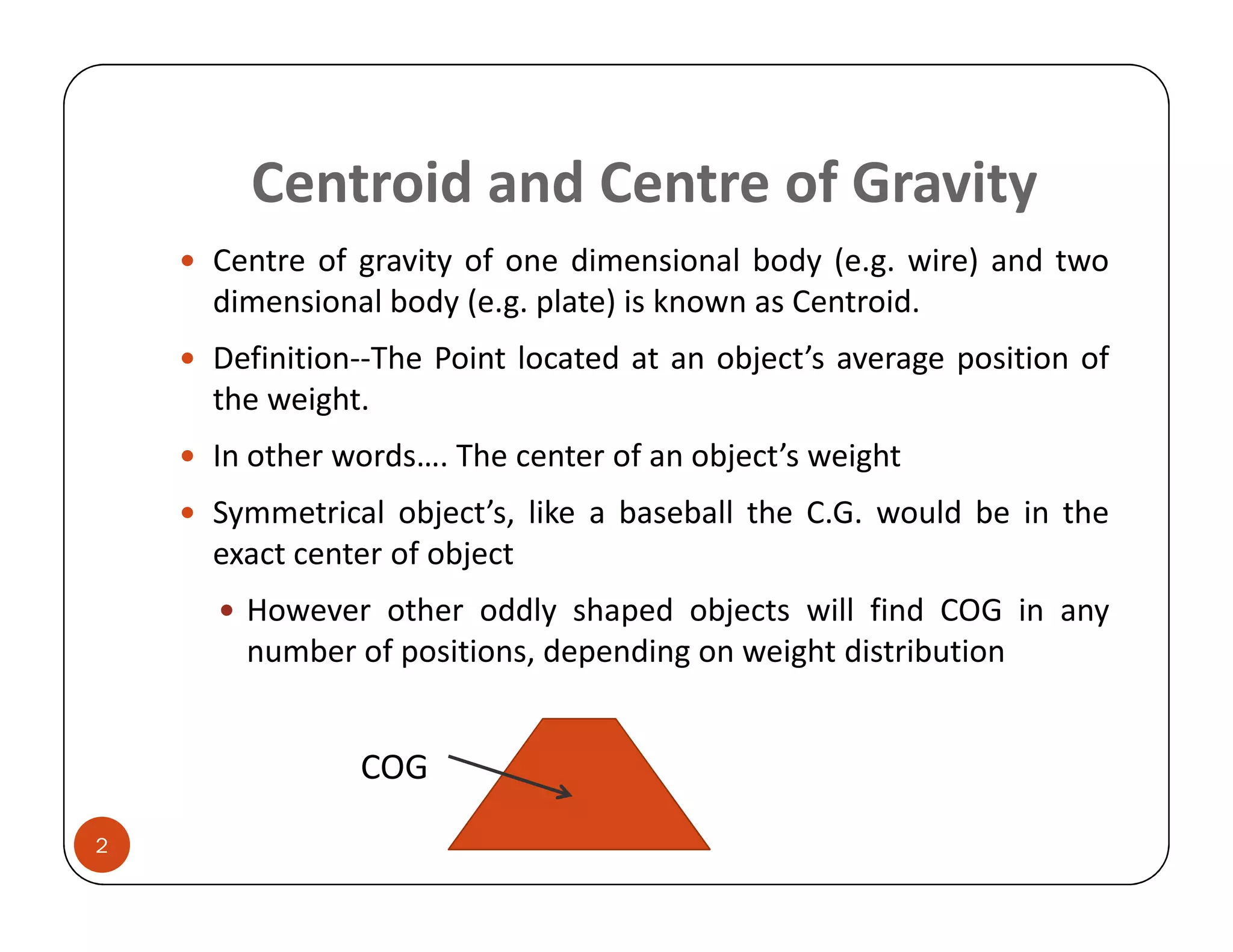
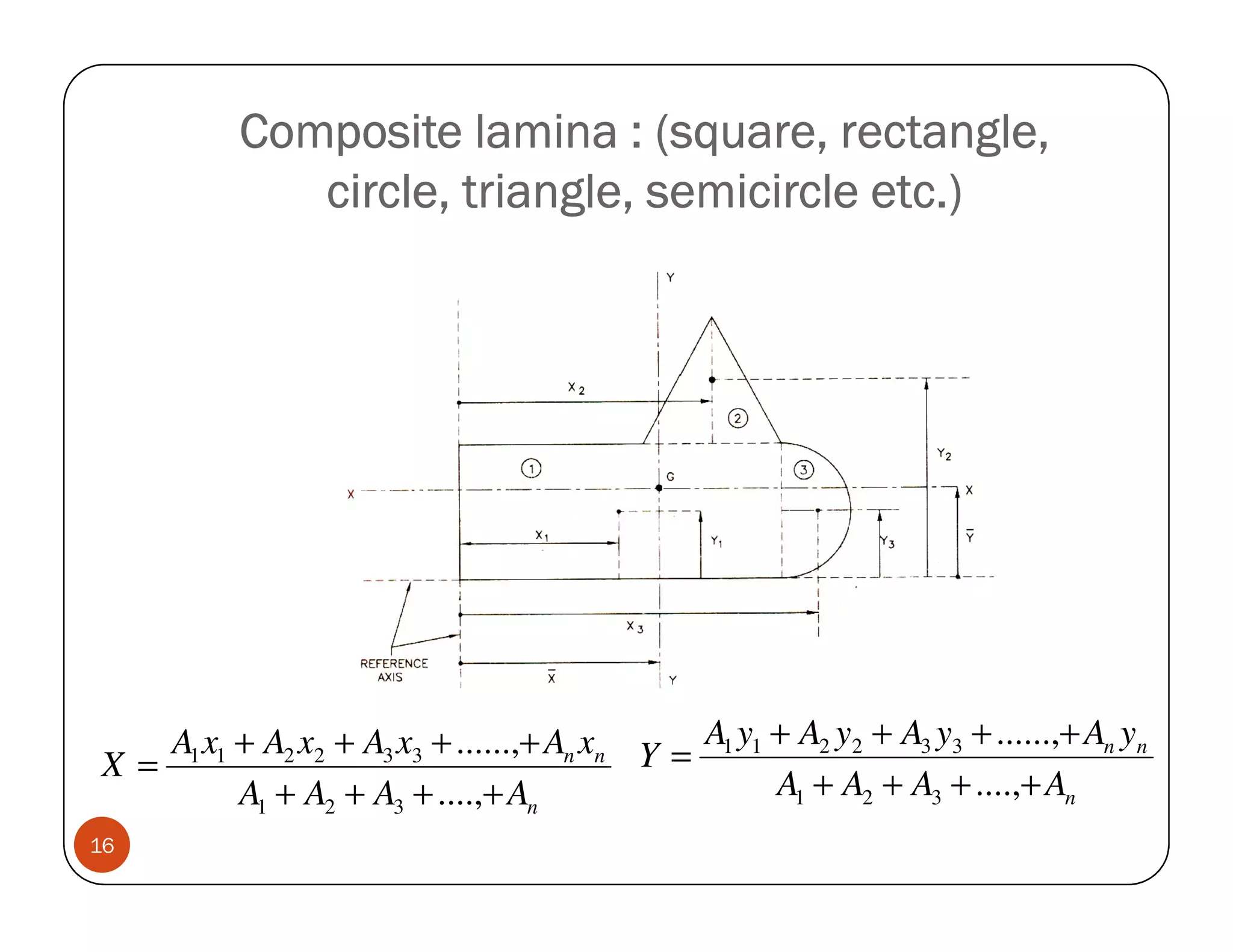
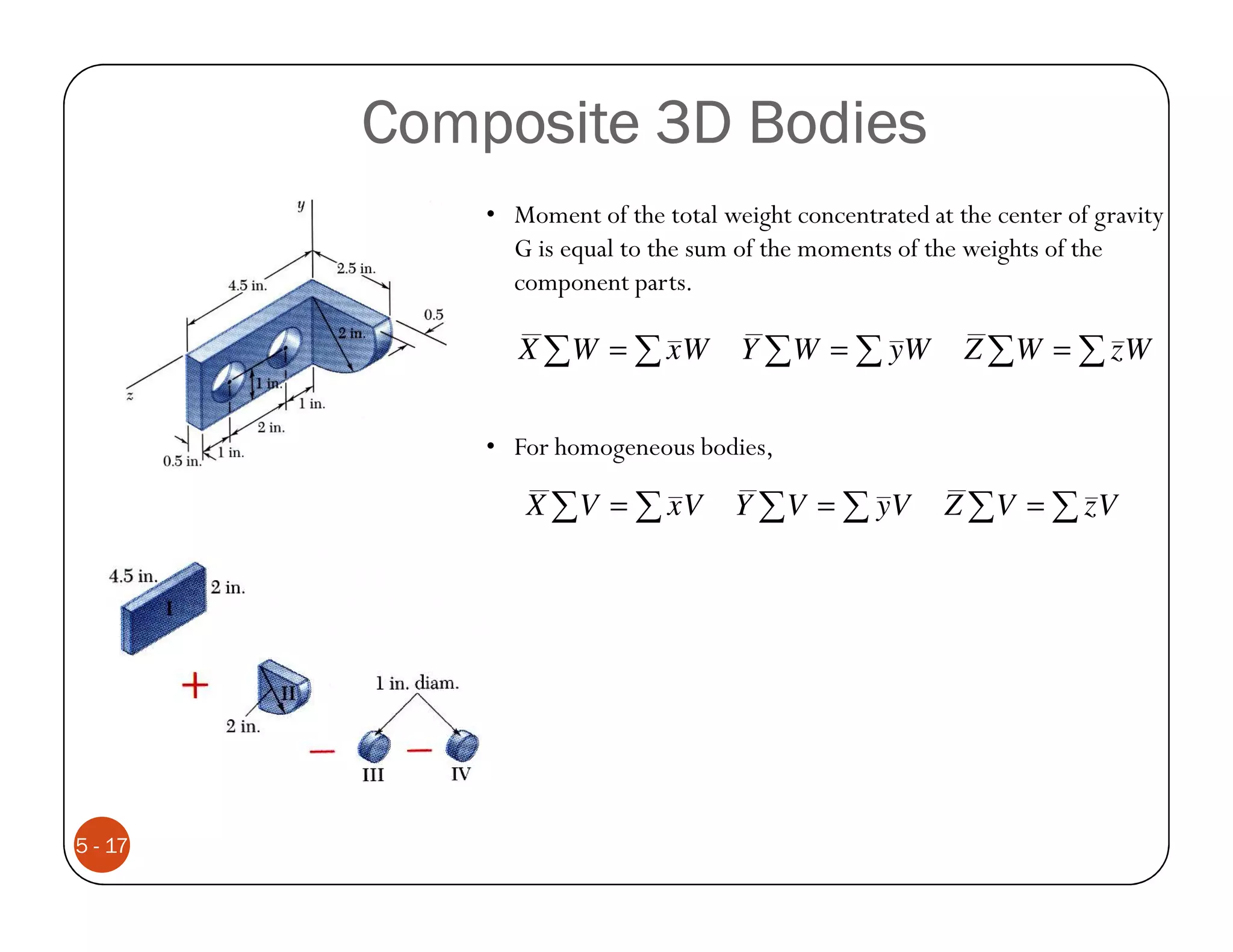
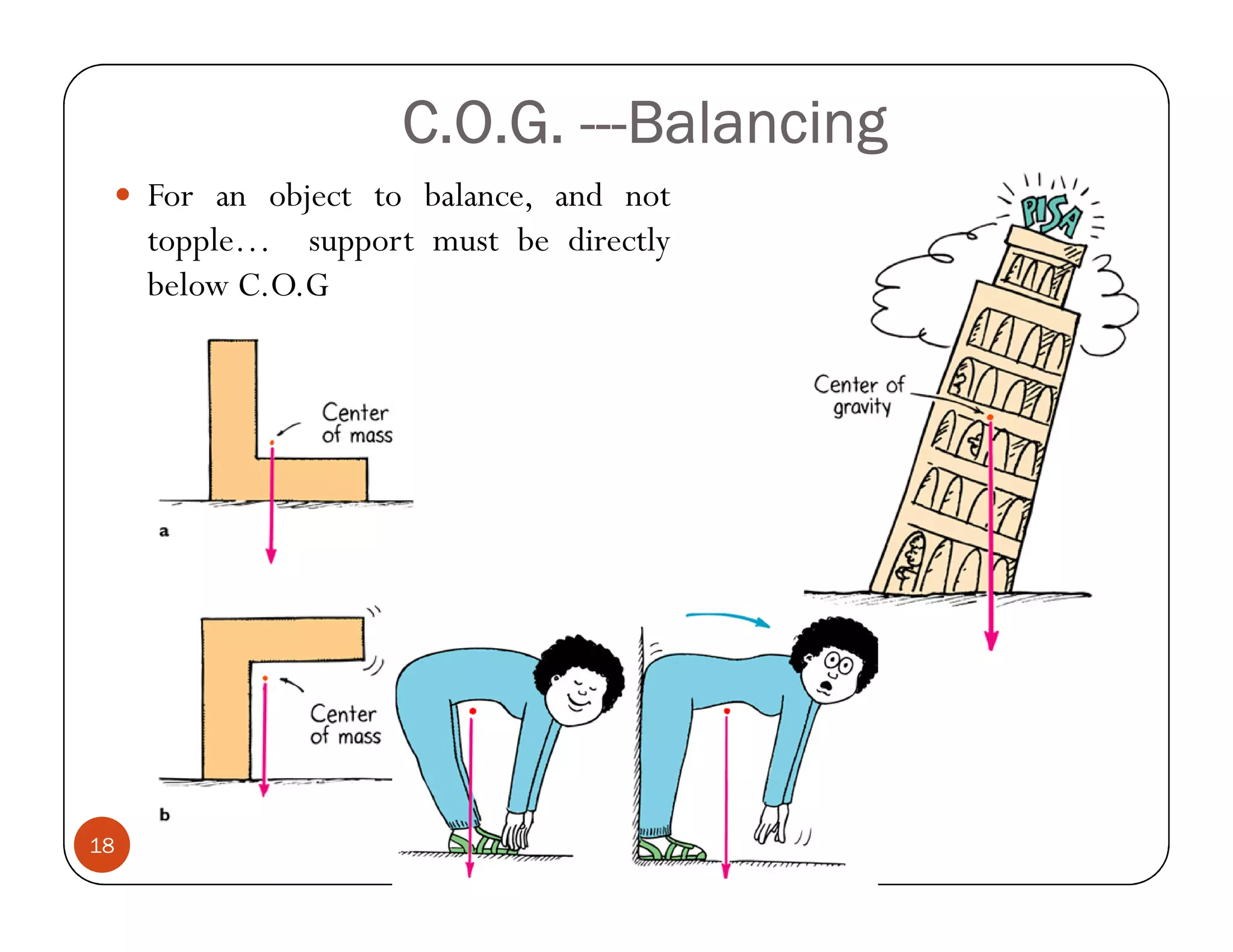
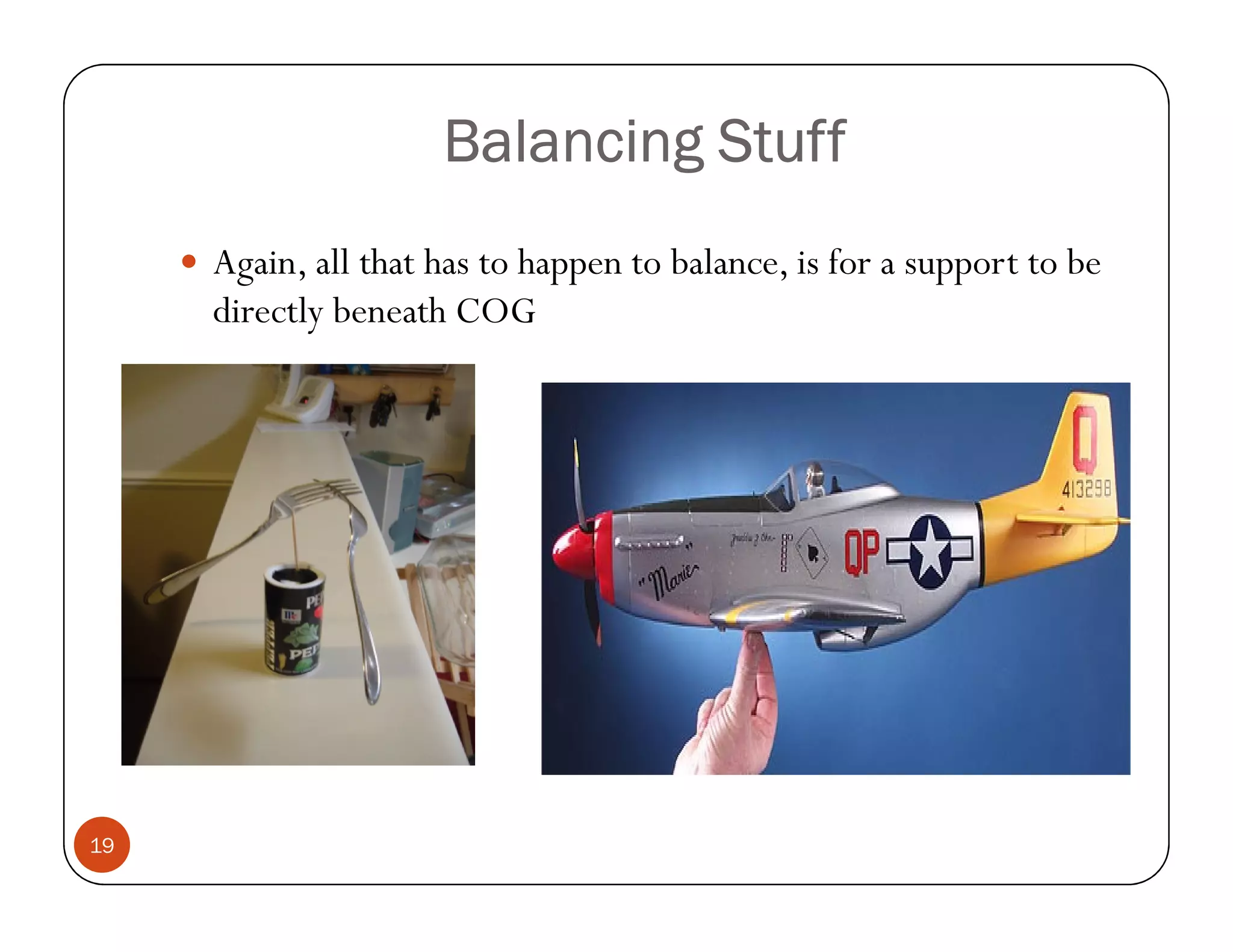
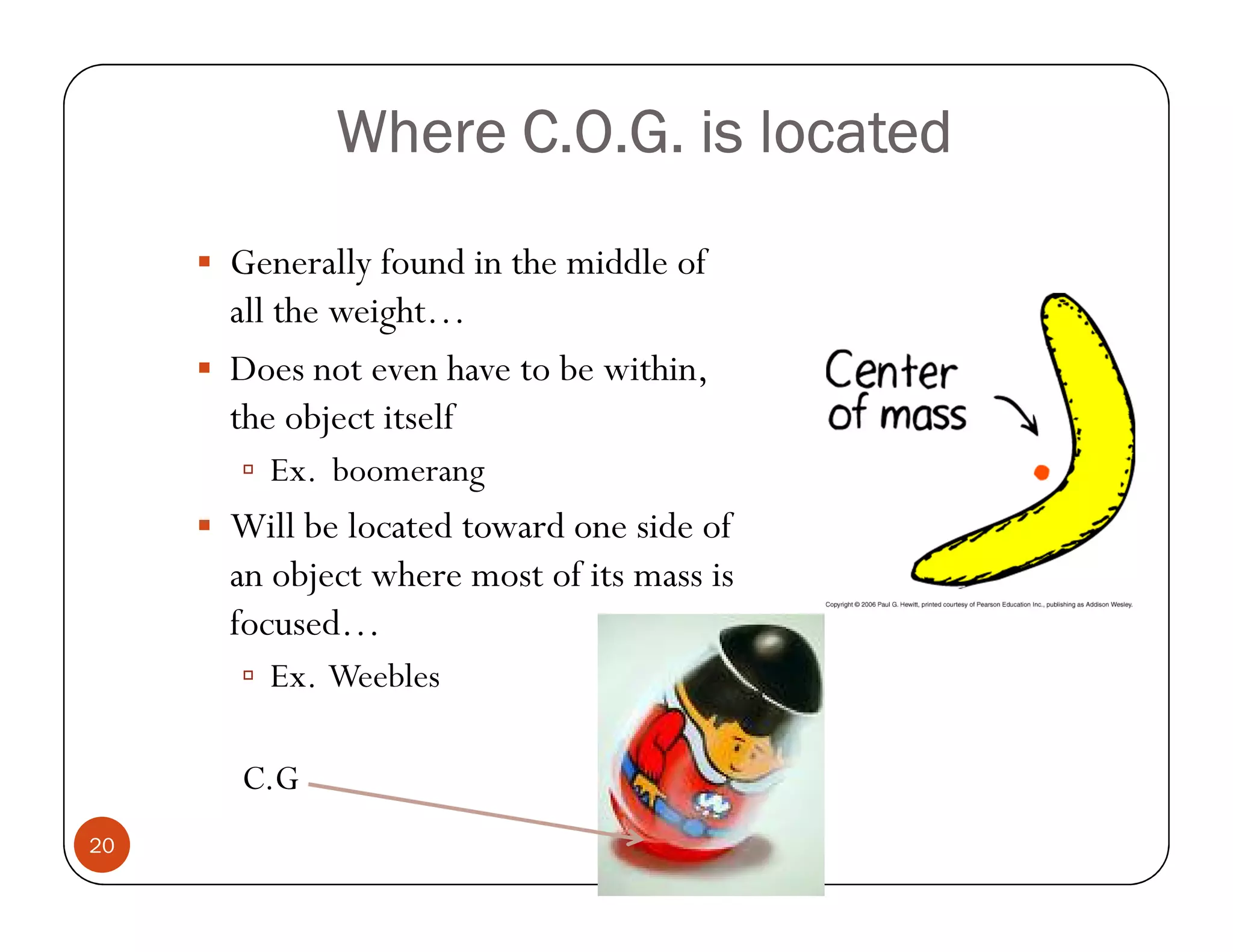
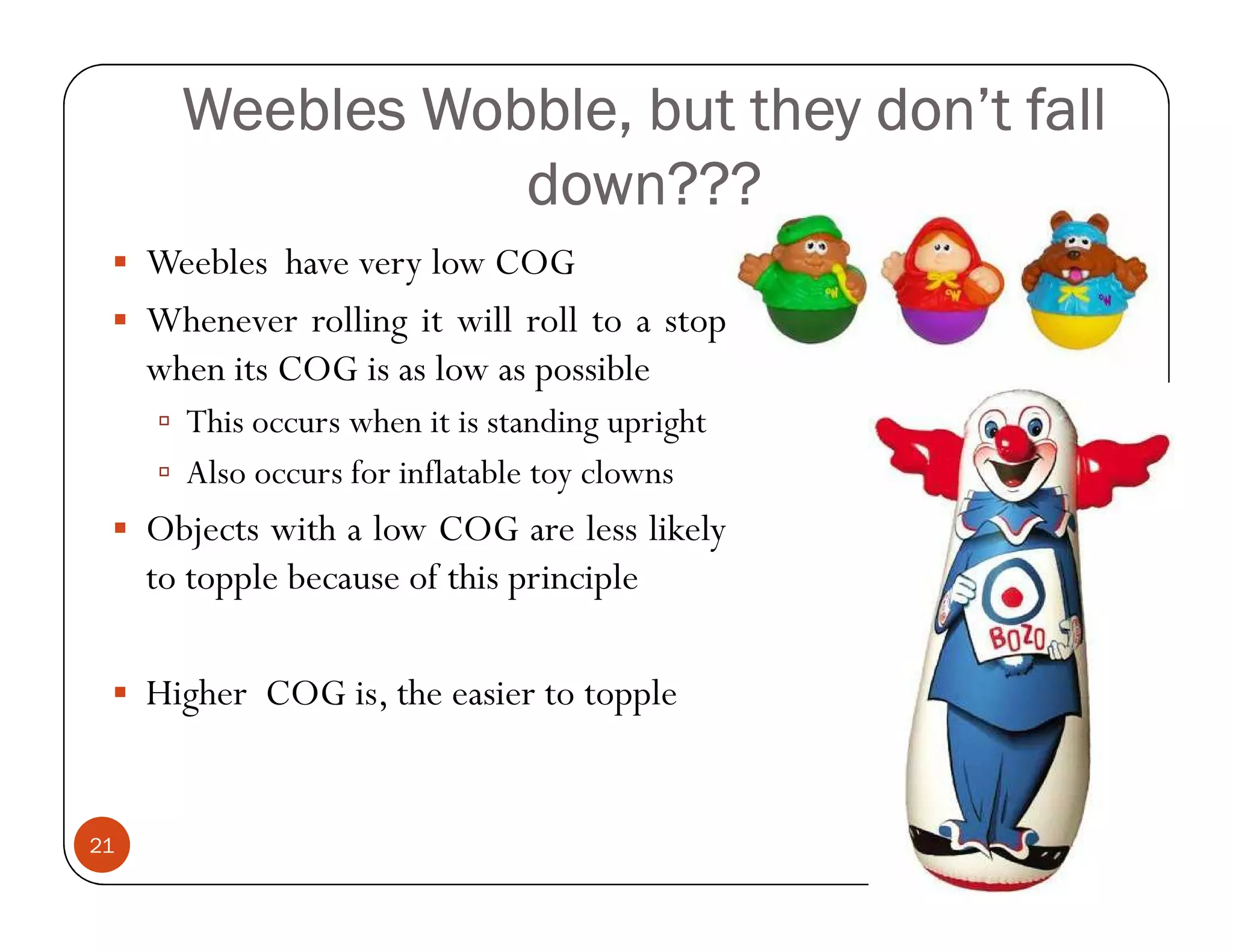
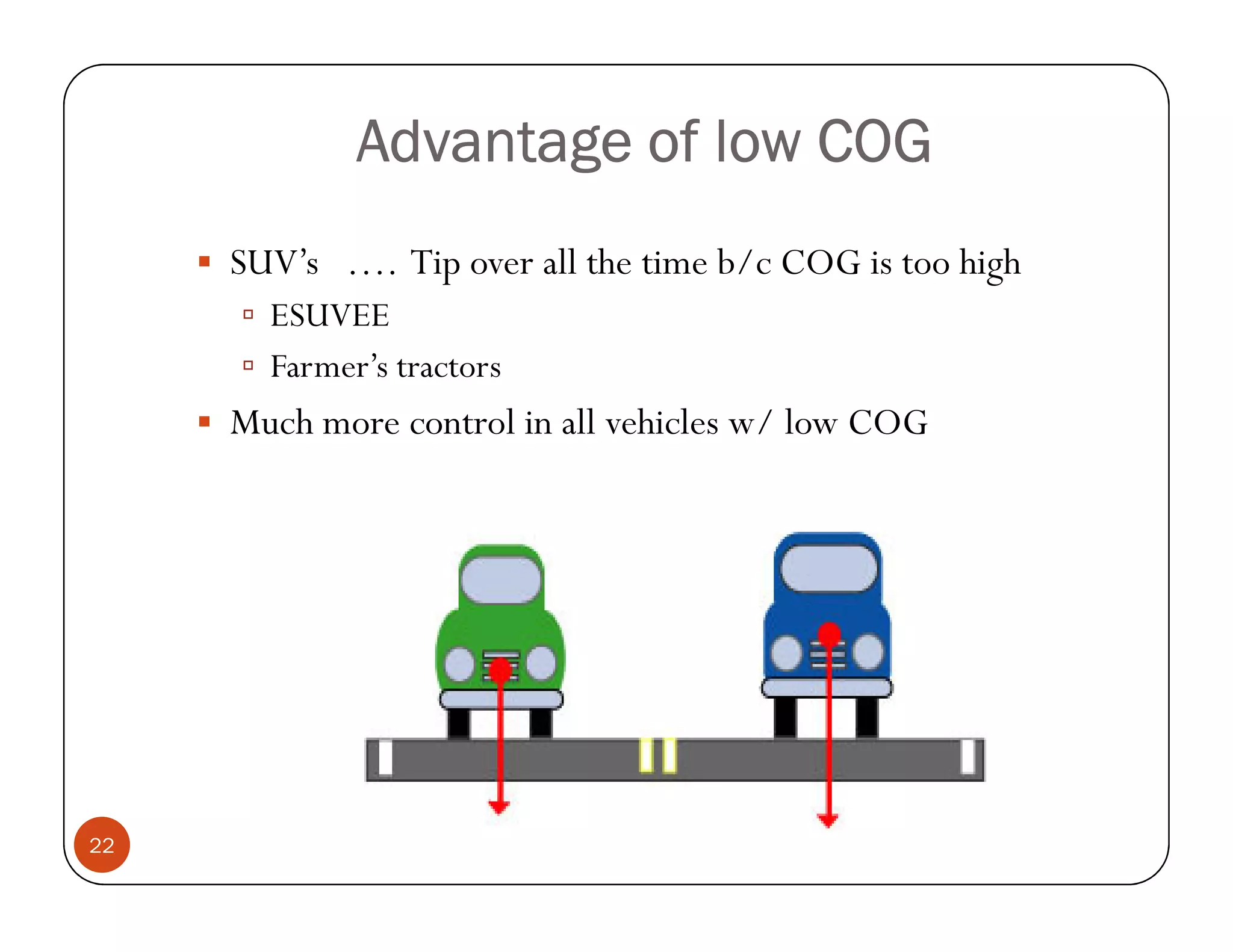
The document discusses the concepts of centroid and centre of gravity. The centroid, also known as the center of gravity, is the point location of an object's average position of weight. For symmetrical objects, the centroid will be at the exact center, but for irregularly shaped objects it depends on the weight distribution. Various methods are described for calculating the centroid of standard shapes, composite objects, and through integration. The centroid is important for balancing objects and determining their stability.
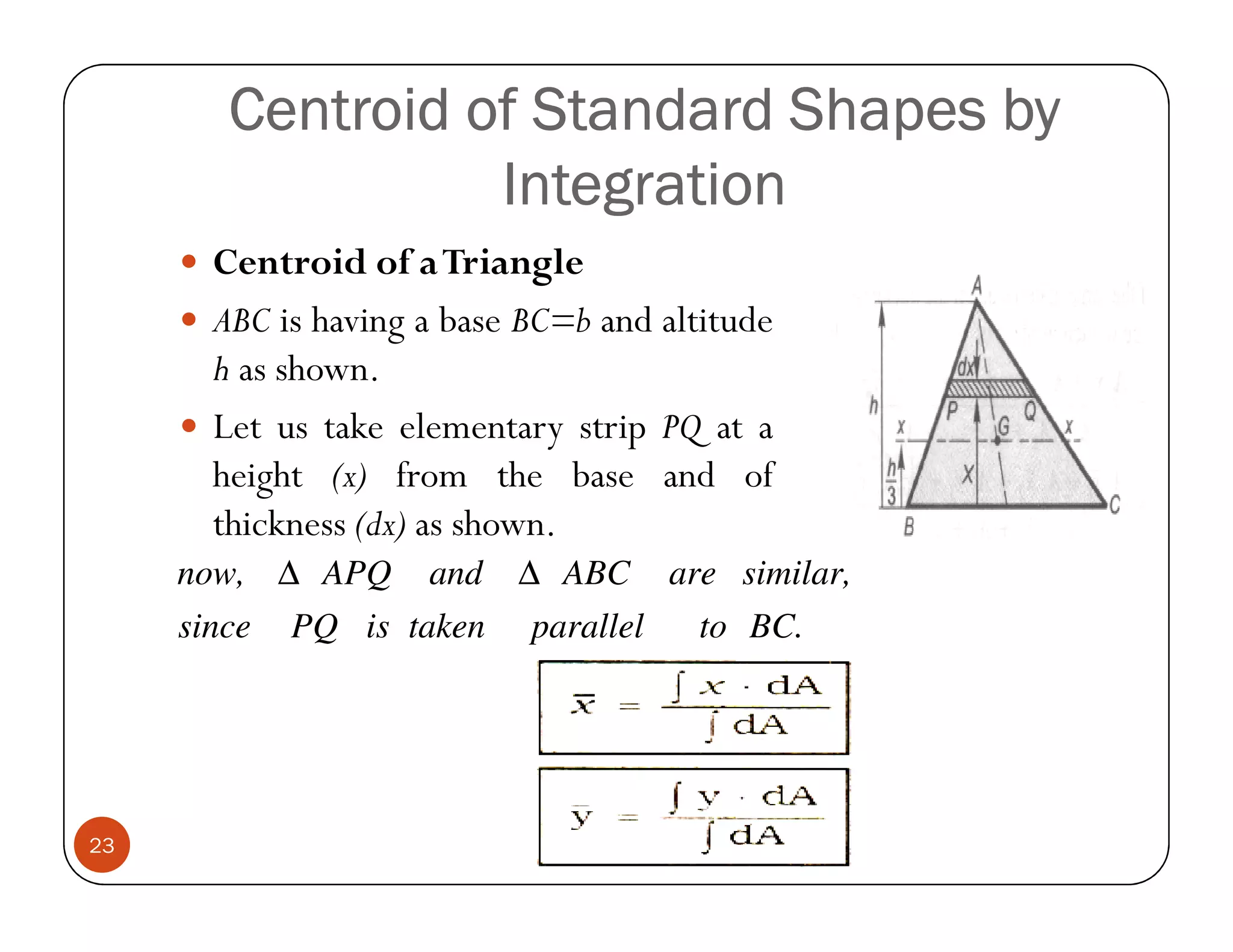
![PQ h − x (h - x)
∴ = ∴ PQ = b
BC h h
(h - x)
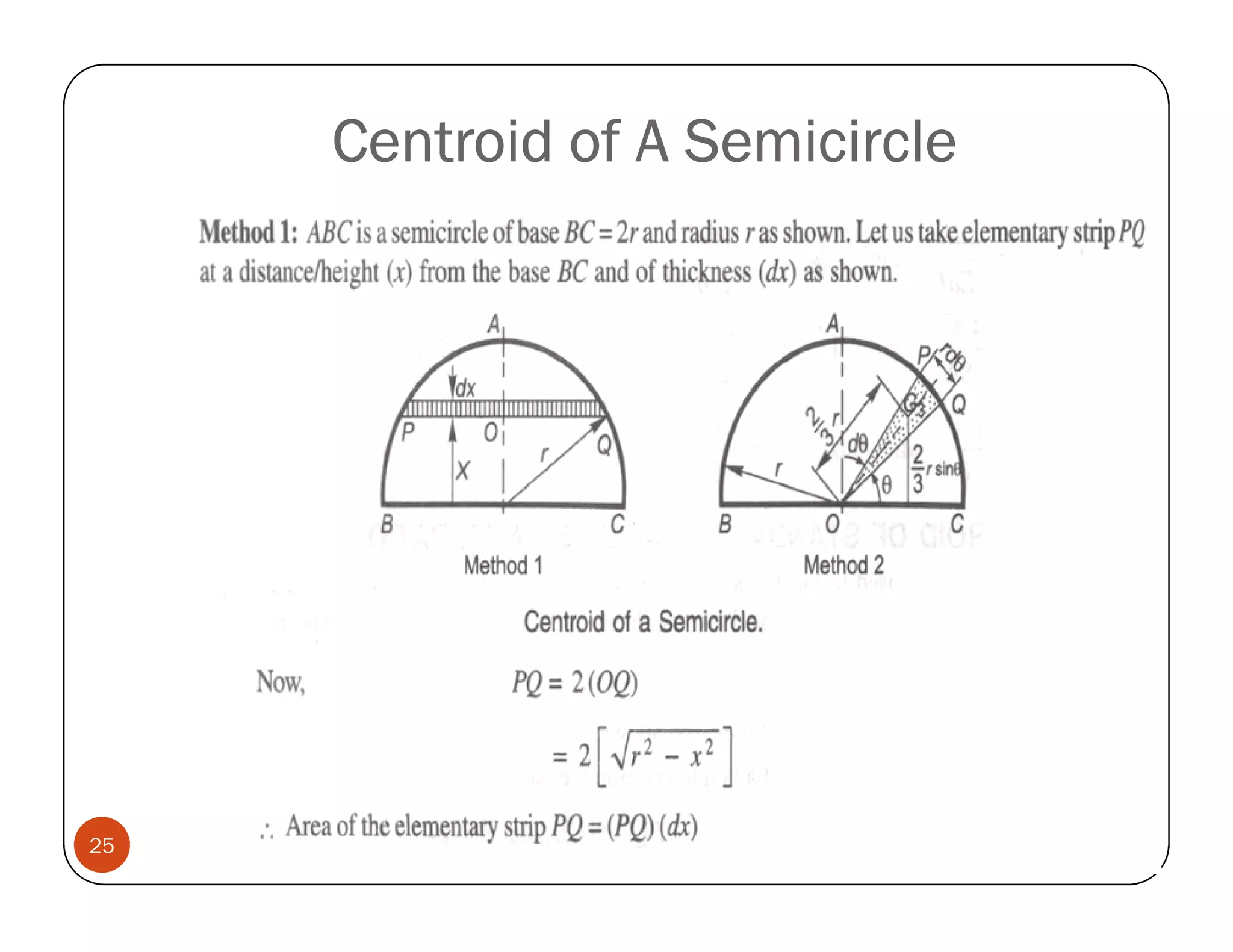
Now area of the elementry stripe PQ = (PQ)(dx) = b. dx
h
(h − x)
now [moment of the elementry strip about base BC] = [ b. dx]. [x ]
h
now equating moments of the area of the triangle about BC, we have
h h
(h − x)b (h − x)b
∫ h
0
. x. dx = y ( A) = y ∫
0
h
. dx
h h
b b
∫ h
0
bx − x 2 . dx = y ∫ b − x . dx
0
h
h h
bx 2 b x 3 b x2
− . = y bx − .
2 h 3 0 h 2 0
h
y=
24 3](https://image.slidesharecdn.com/chapter4-120107005859-phpapp01/75/Chapter-4-24-2048.jpg)