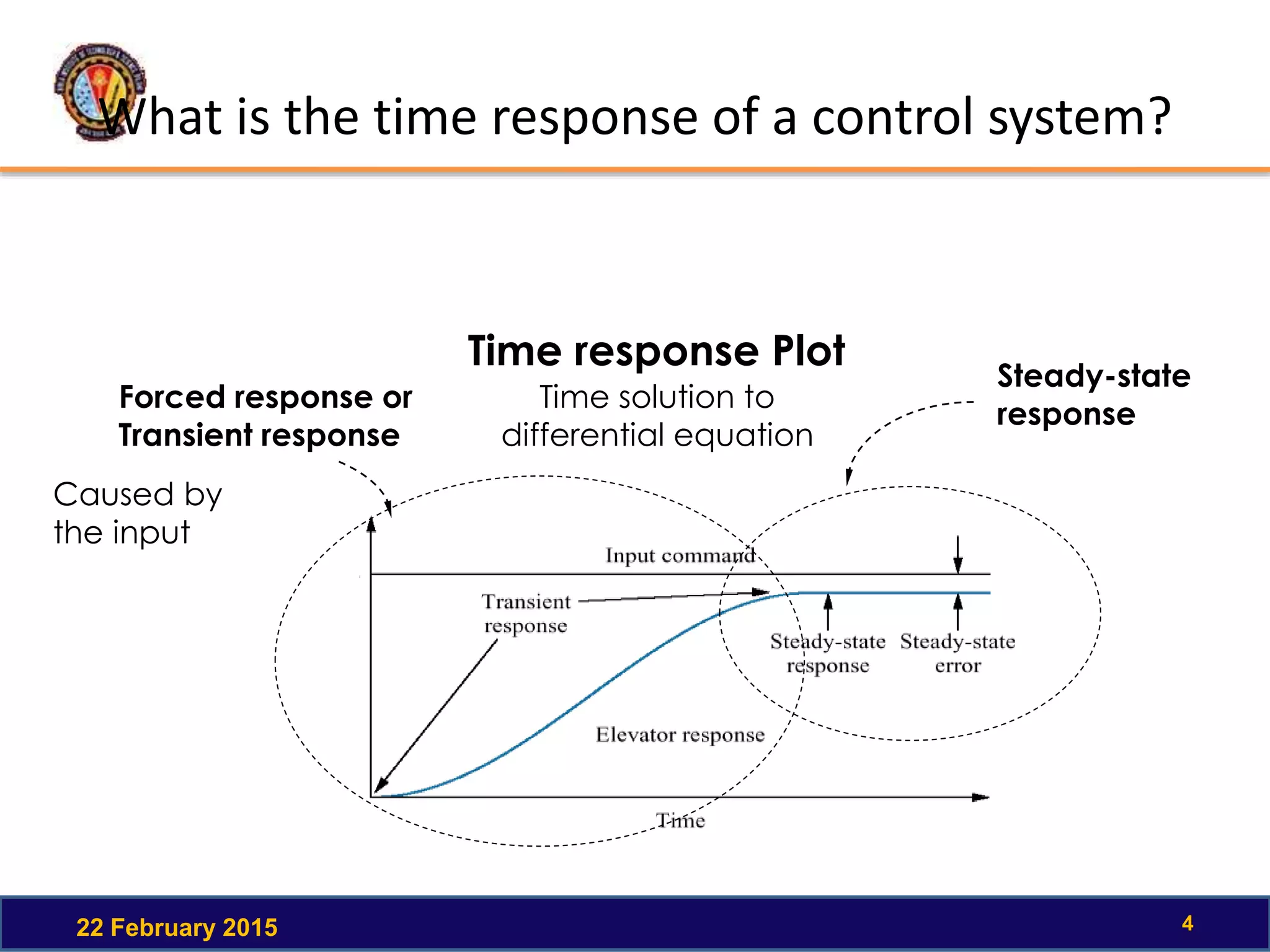
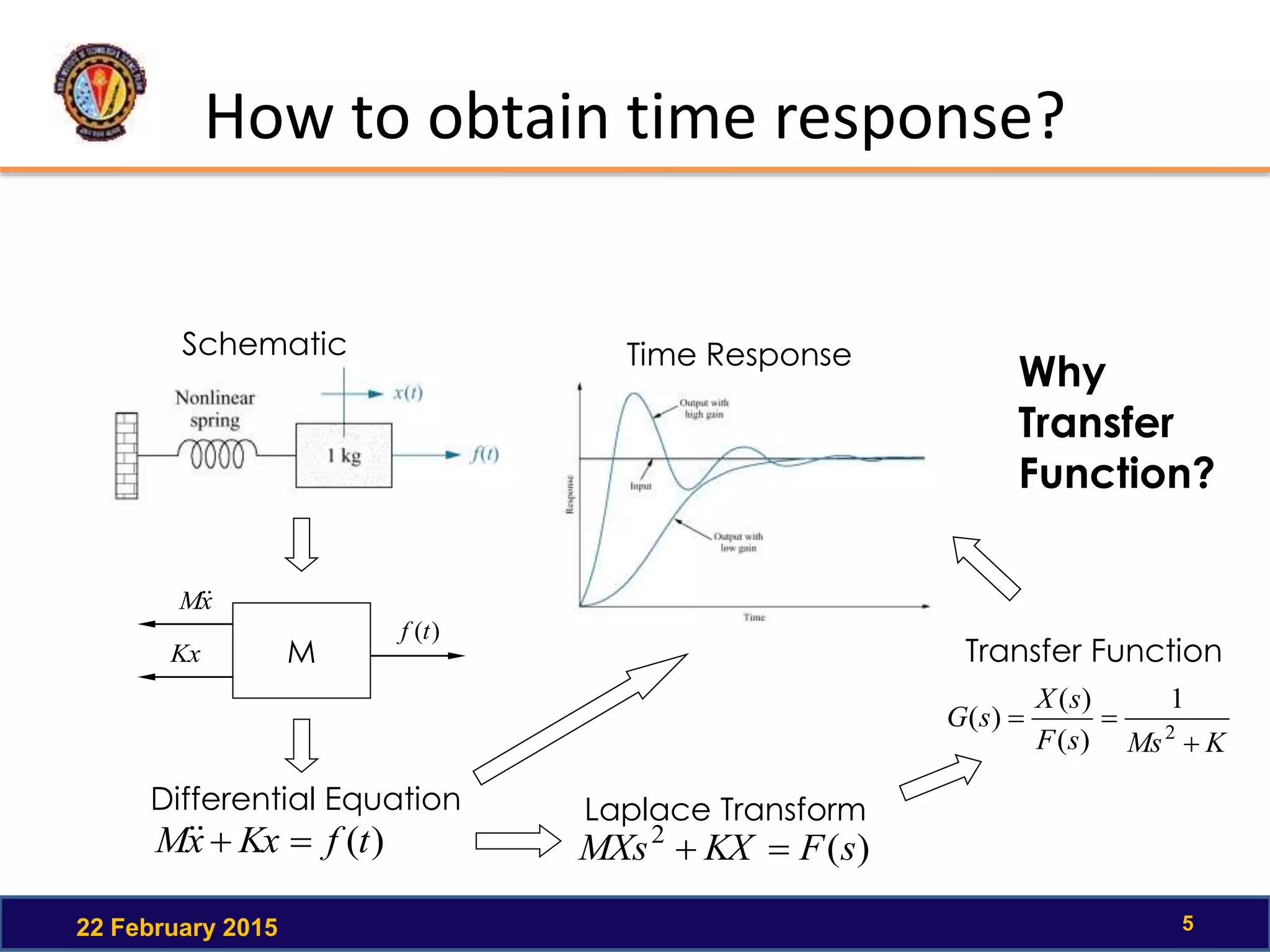
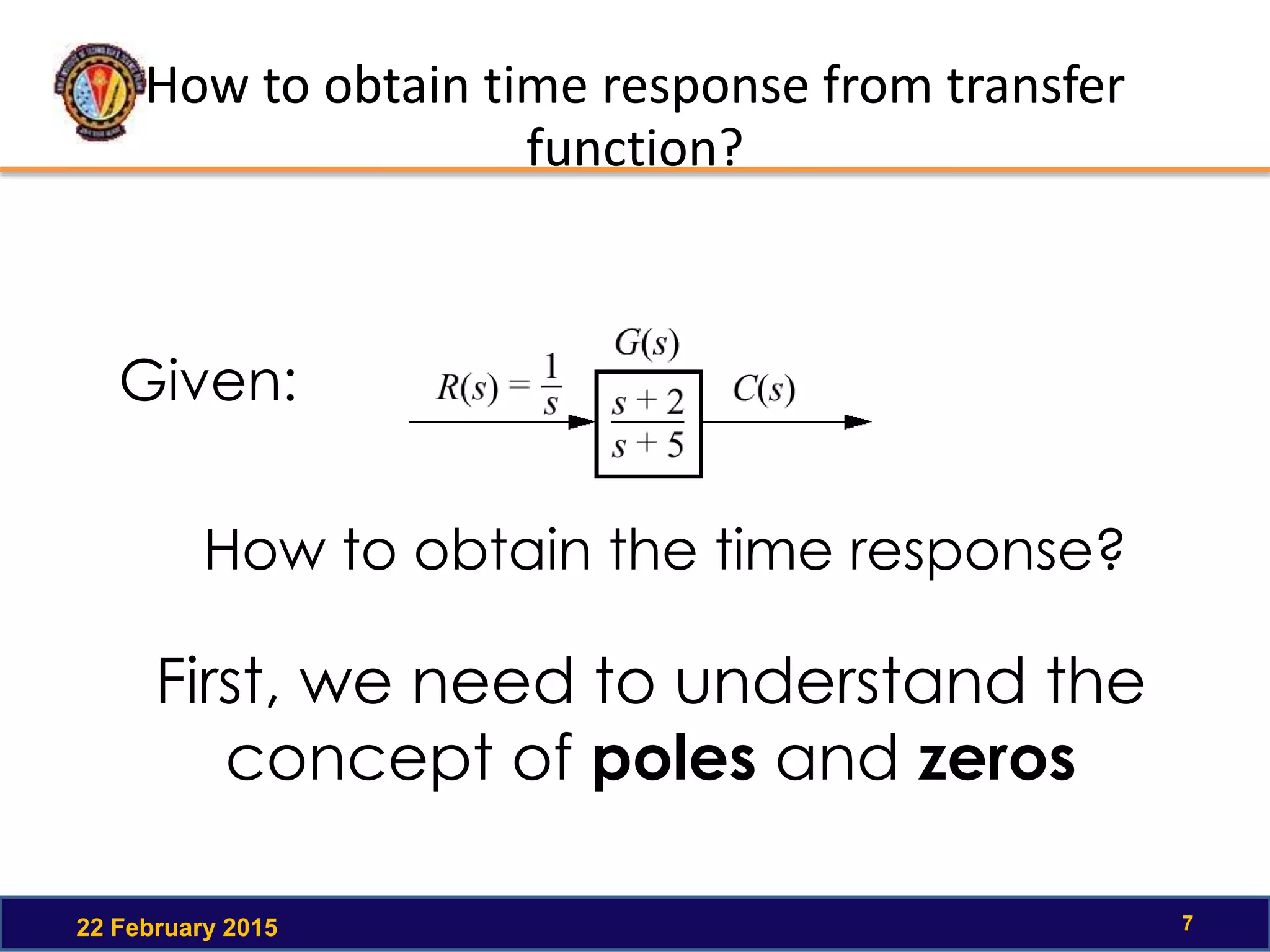
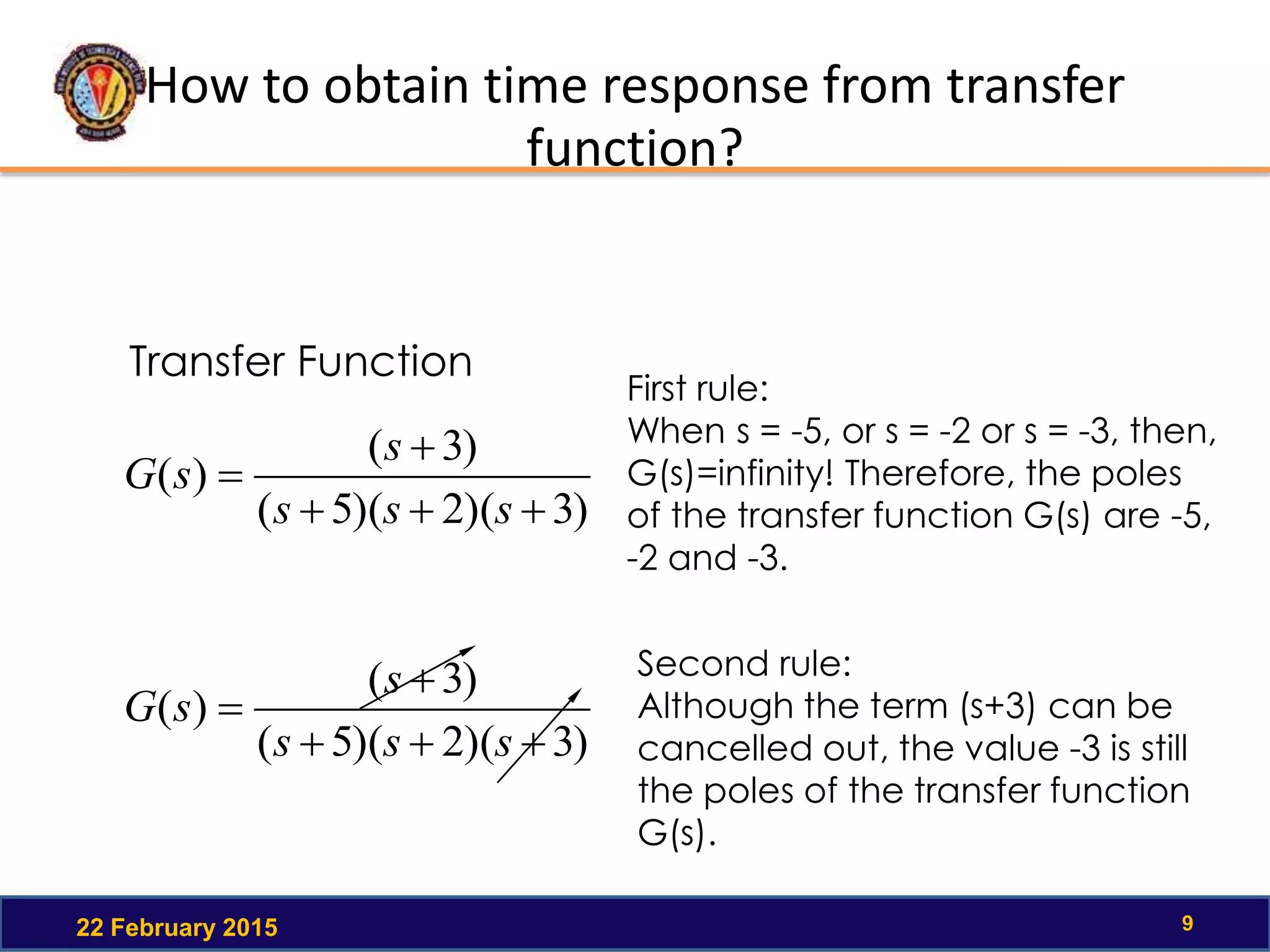
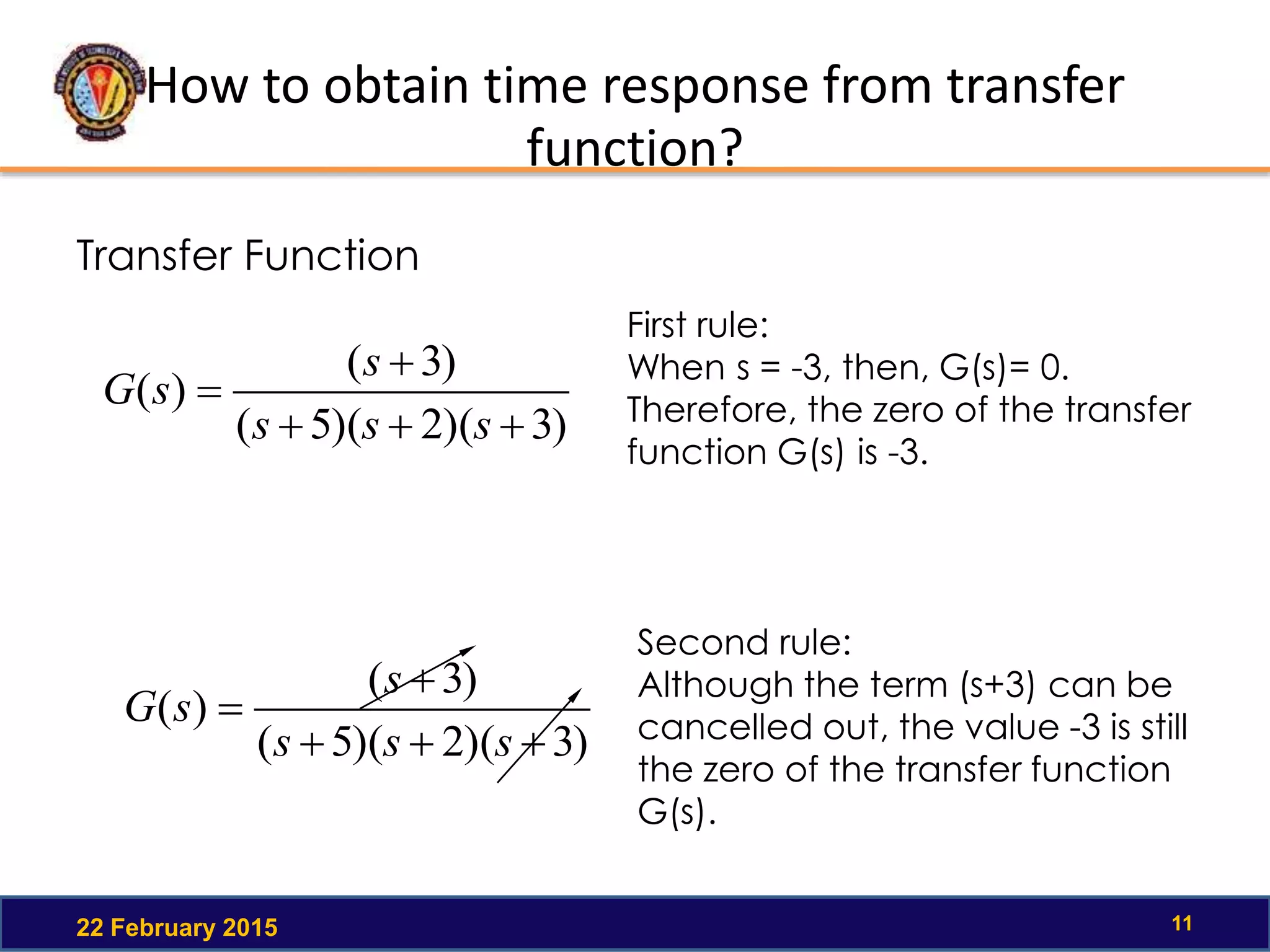
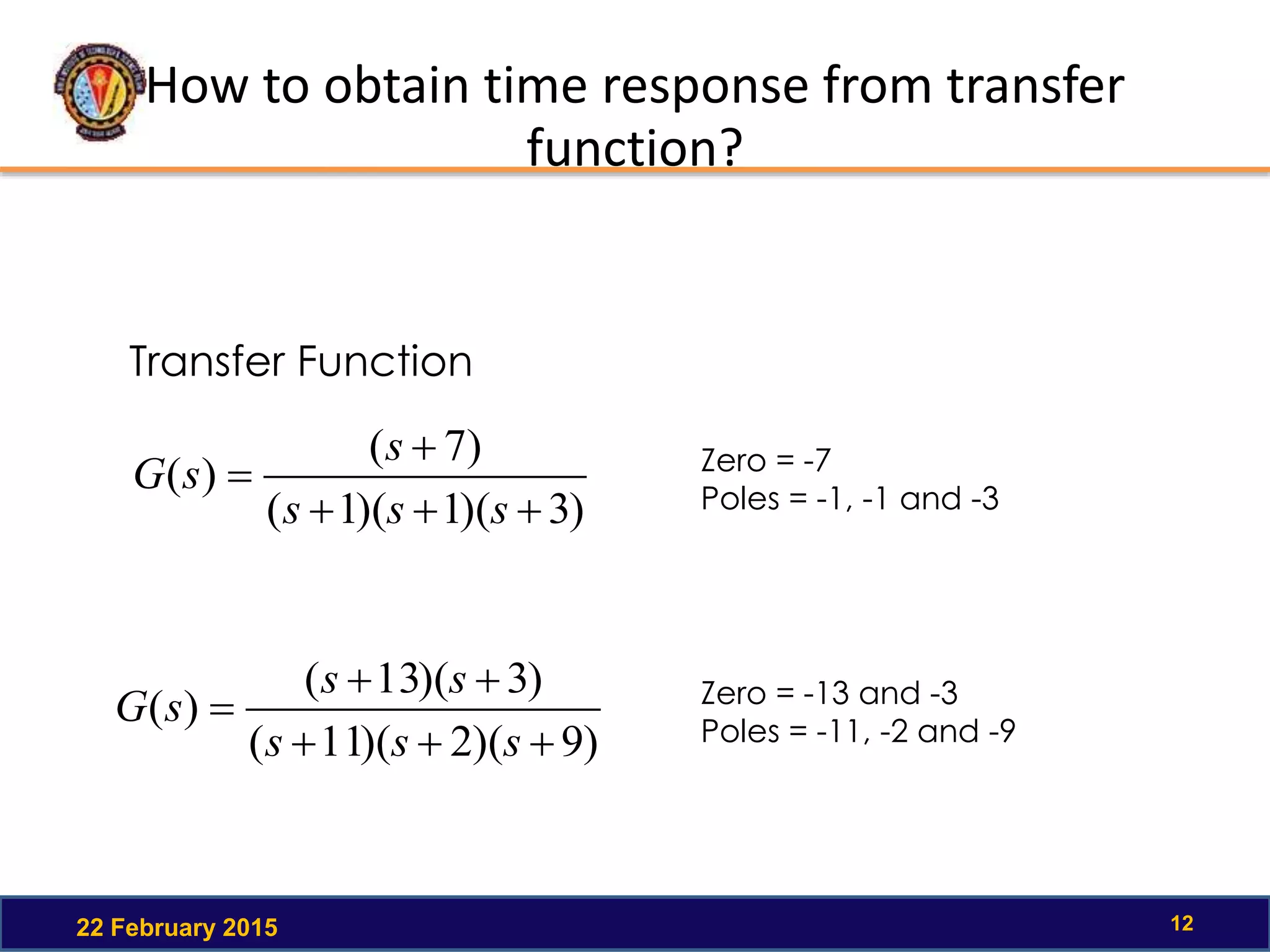
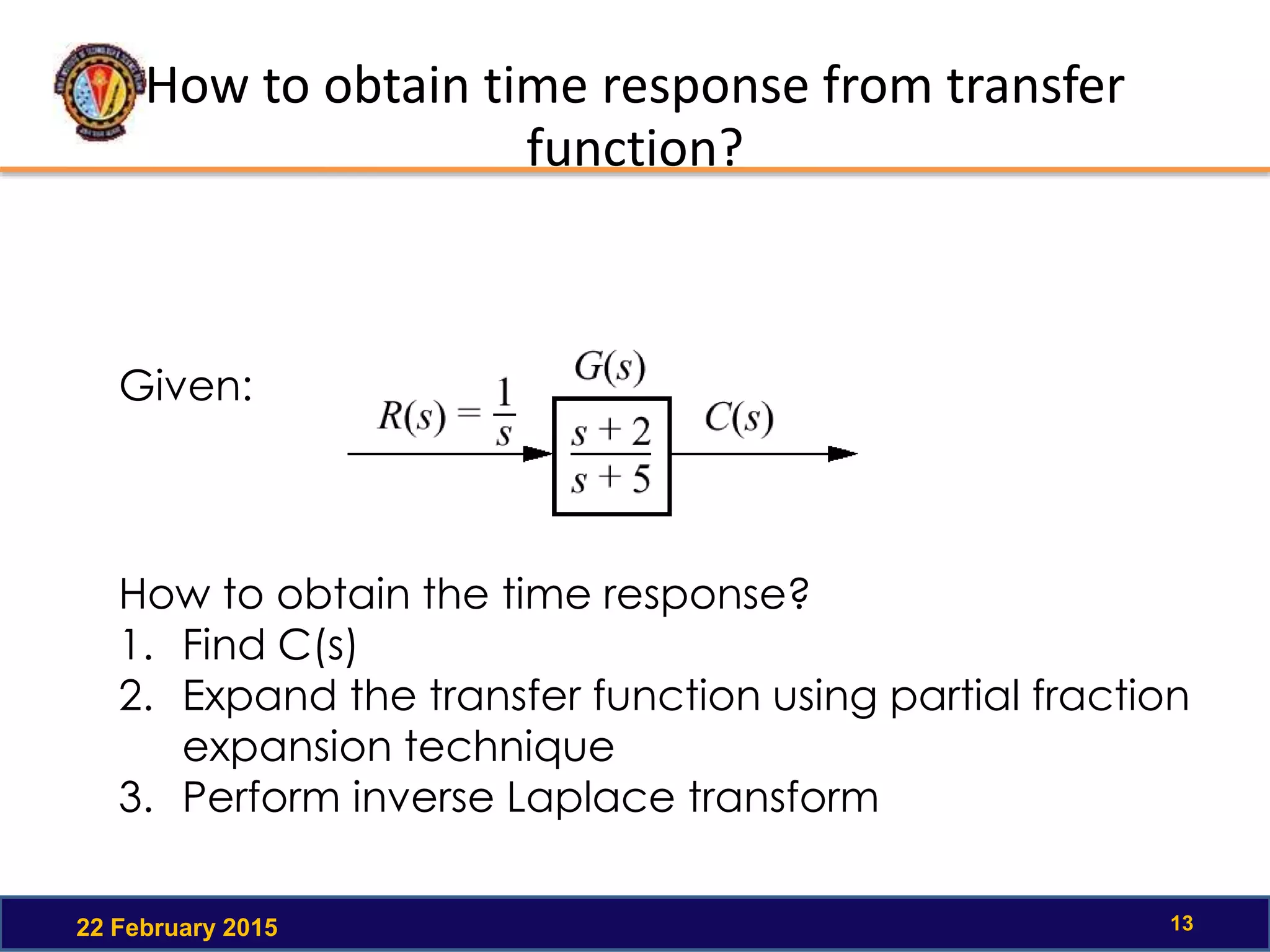
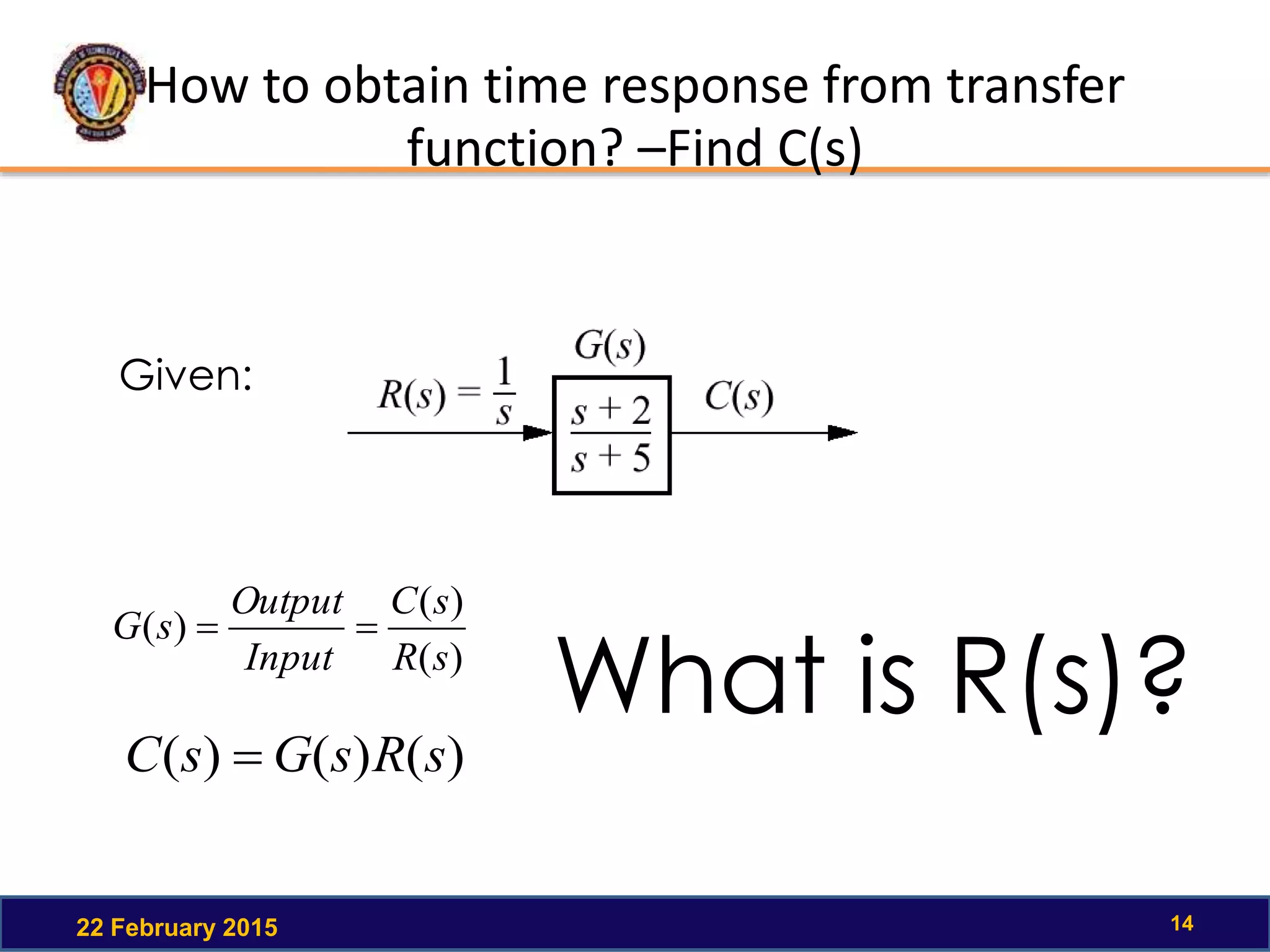
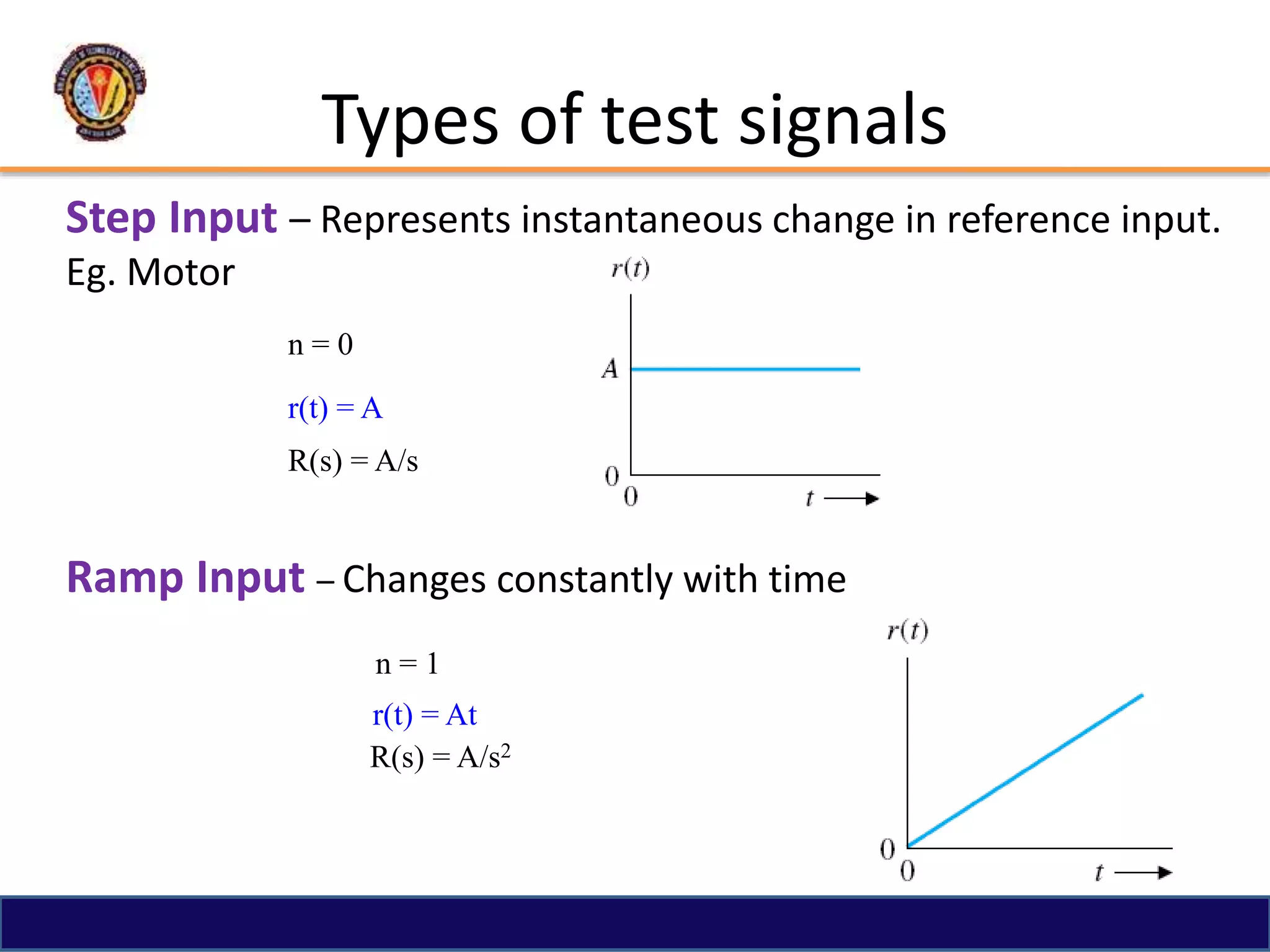
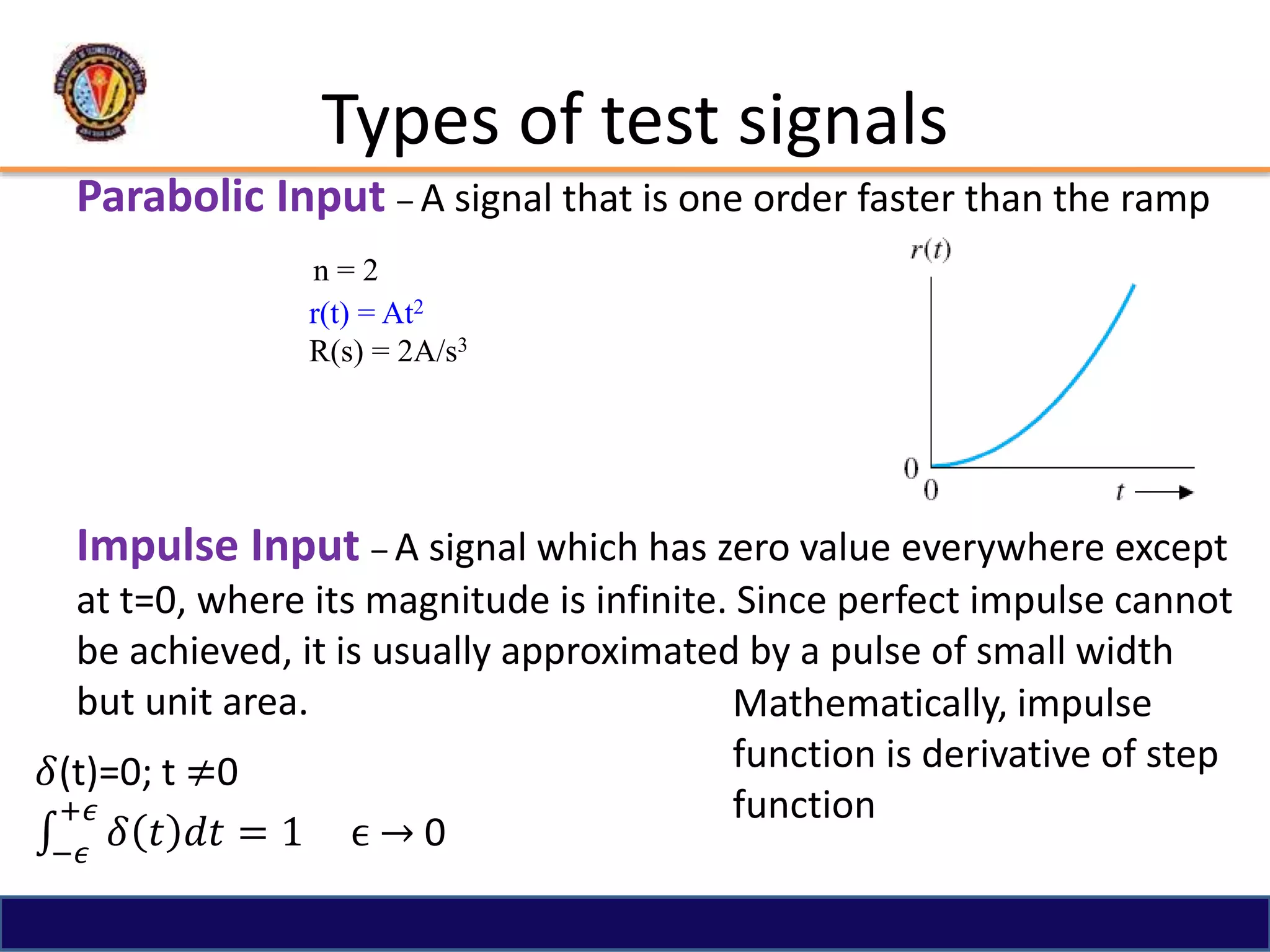
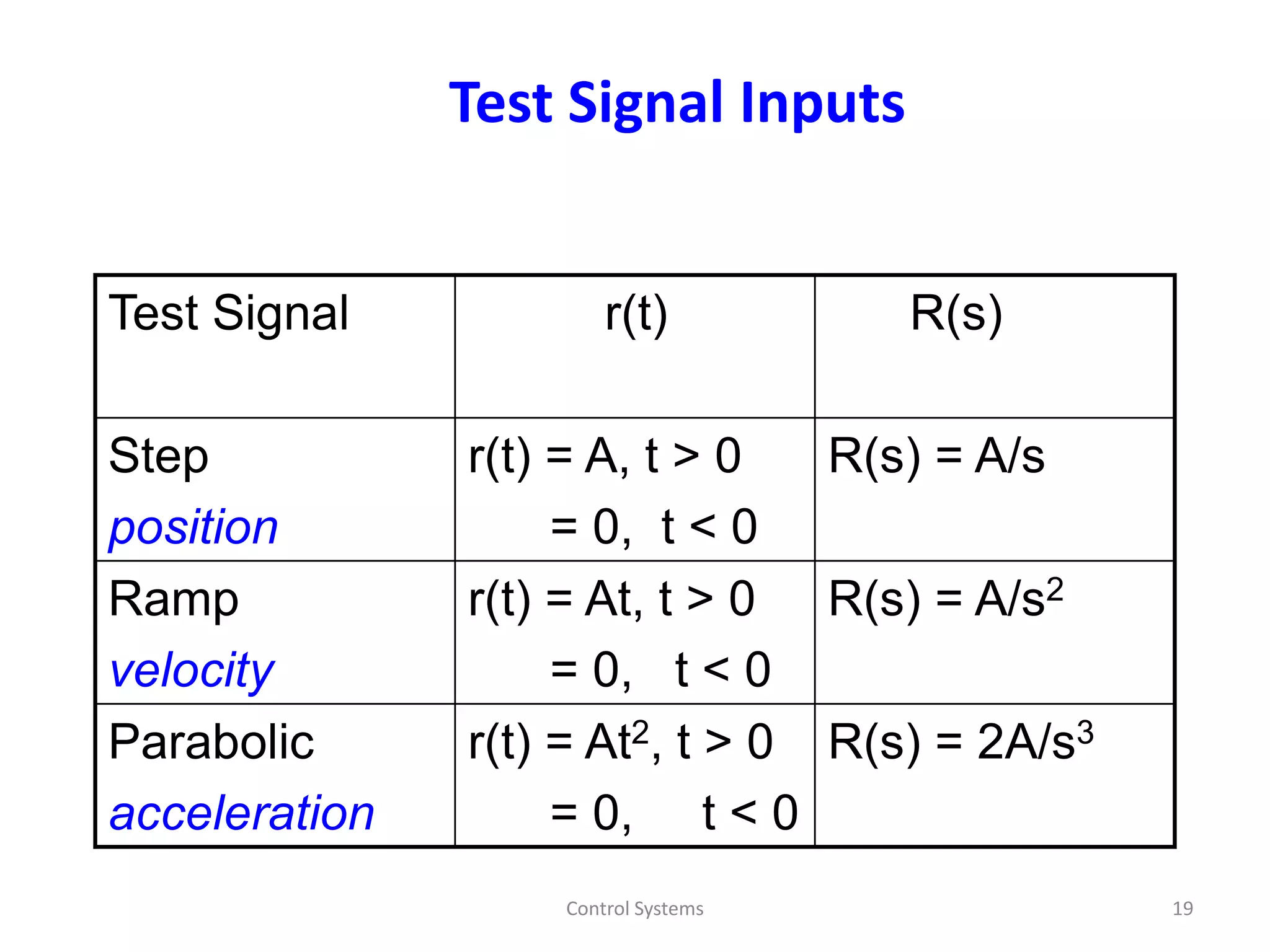
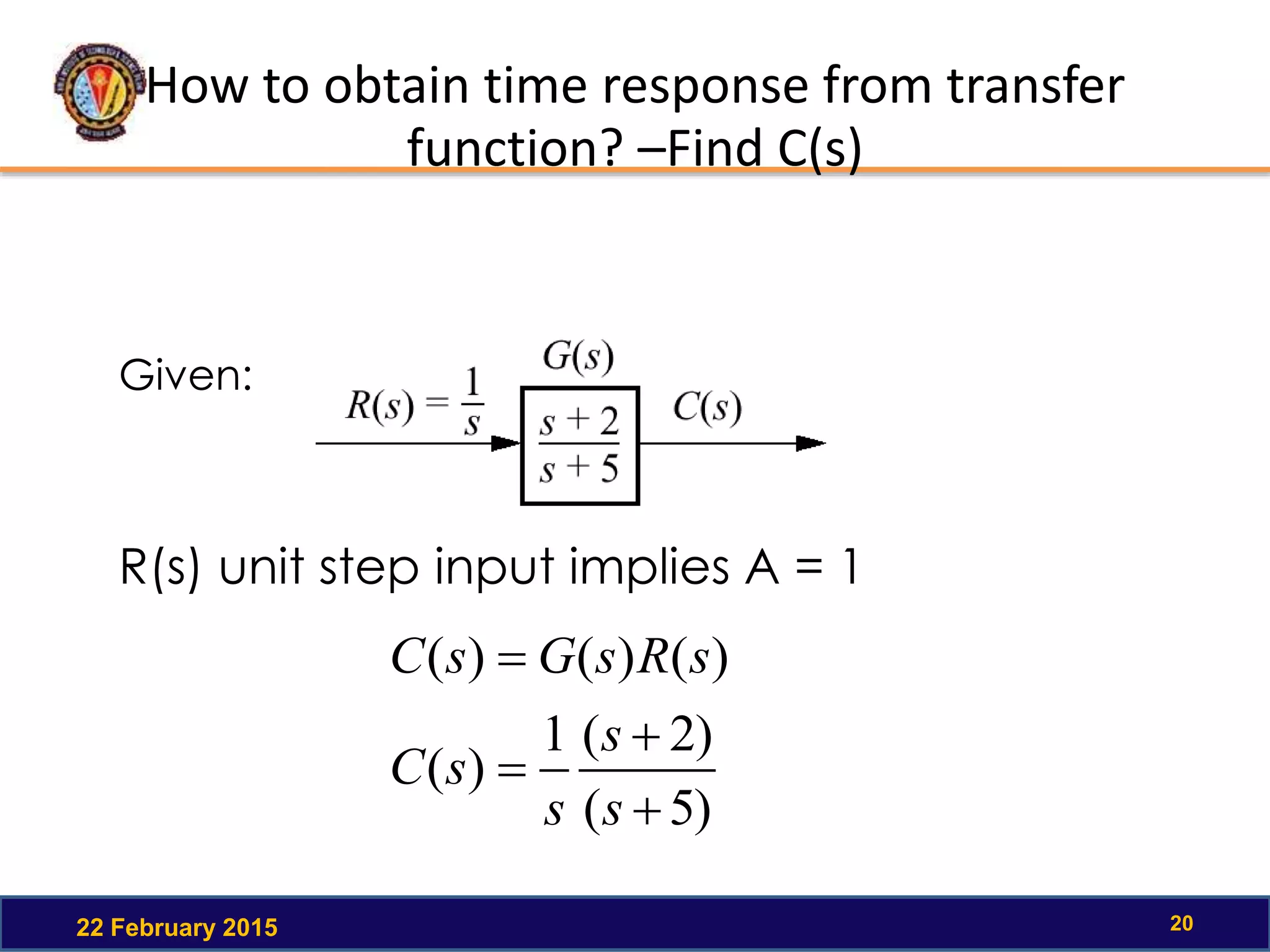
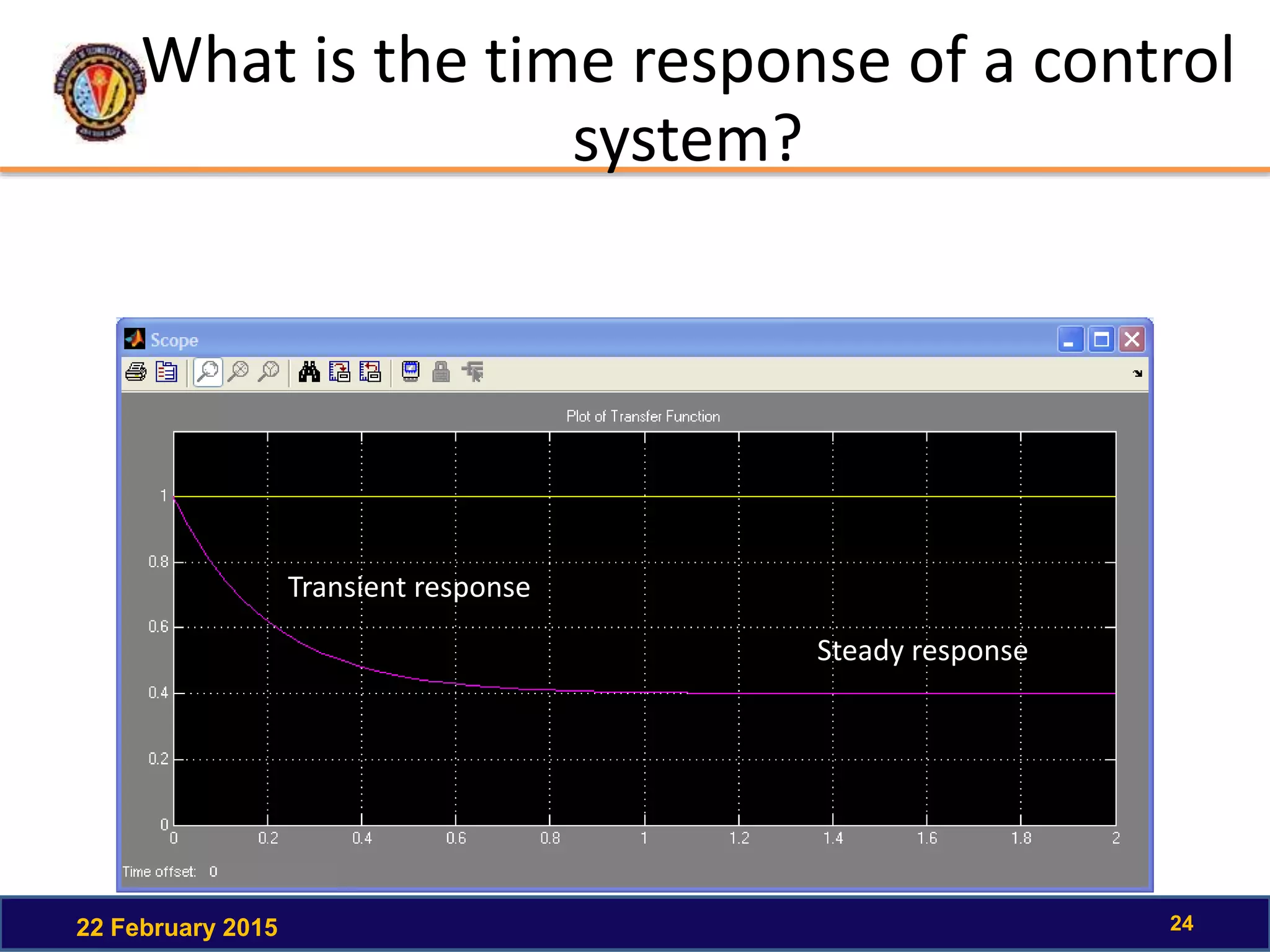
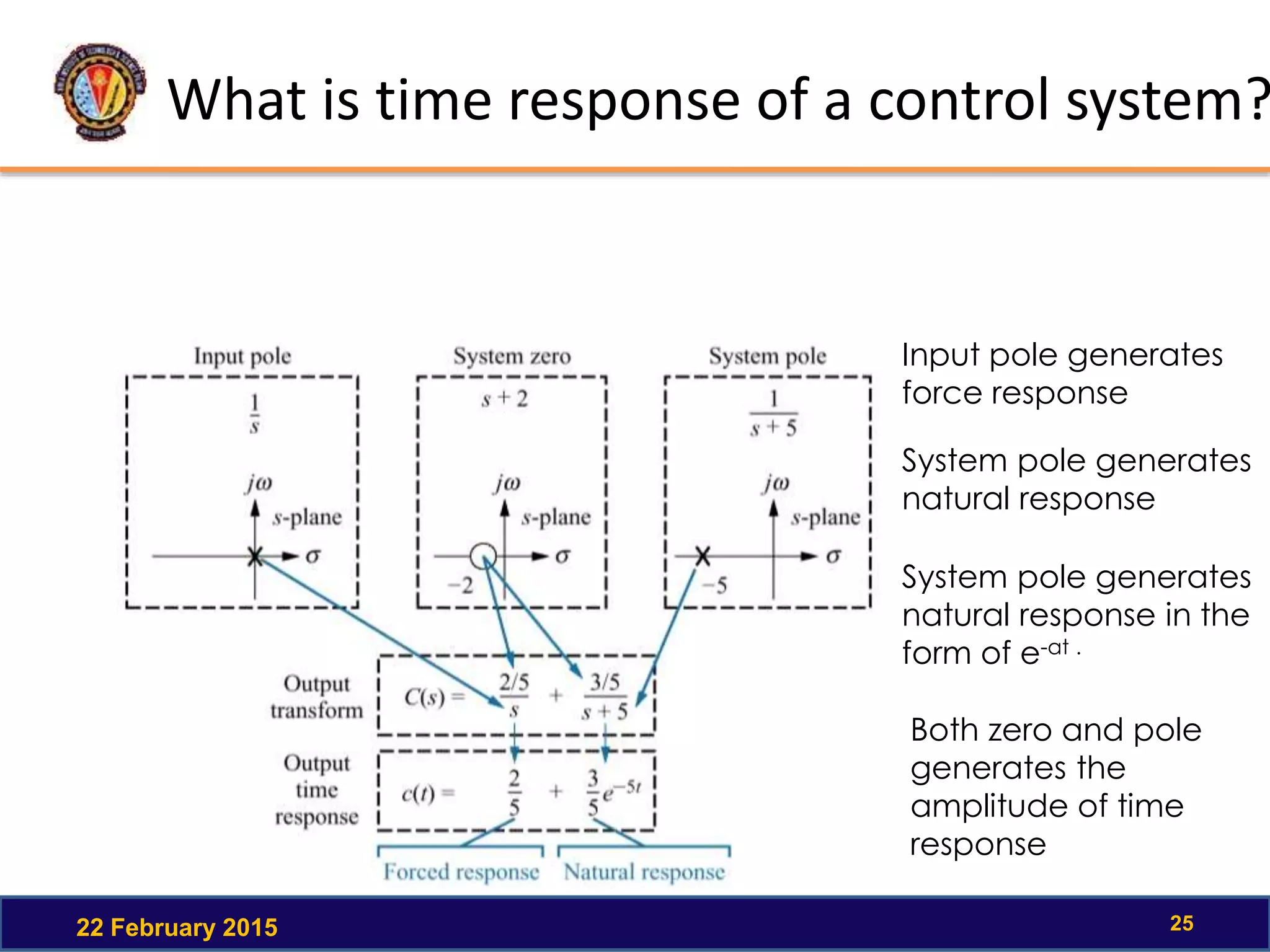
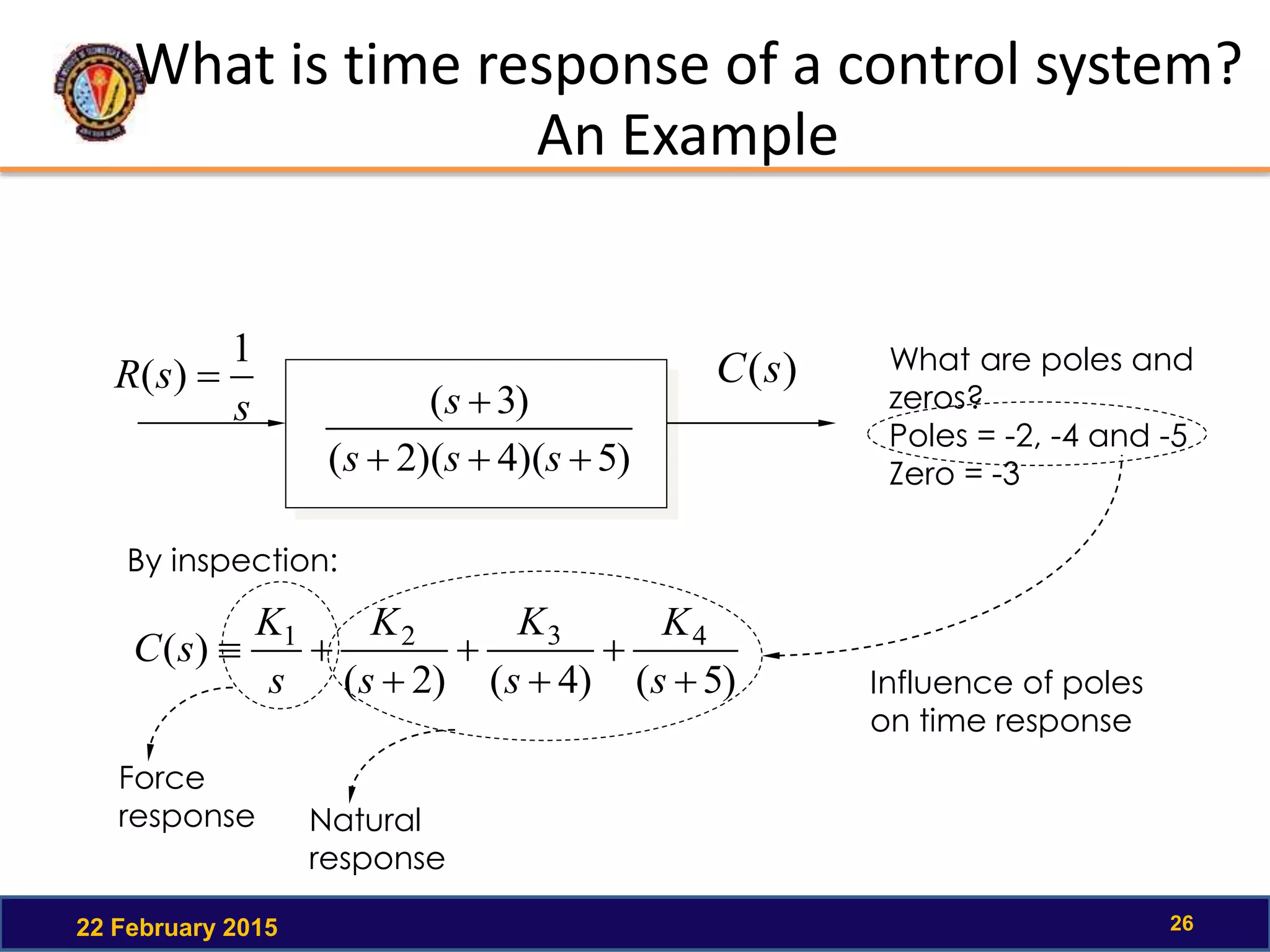
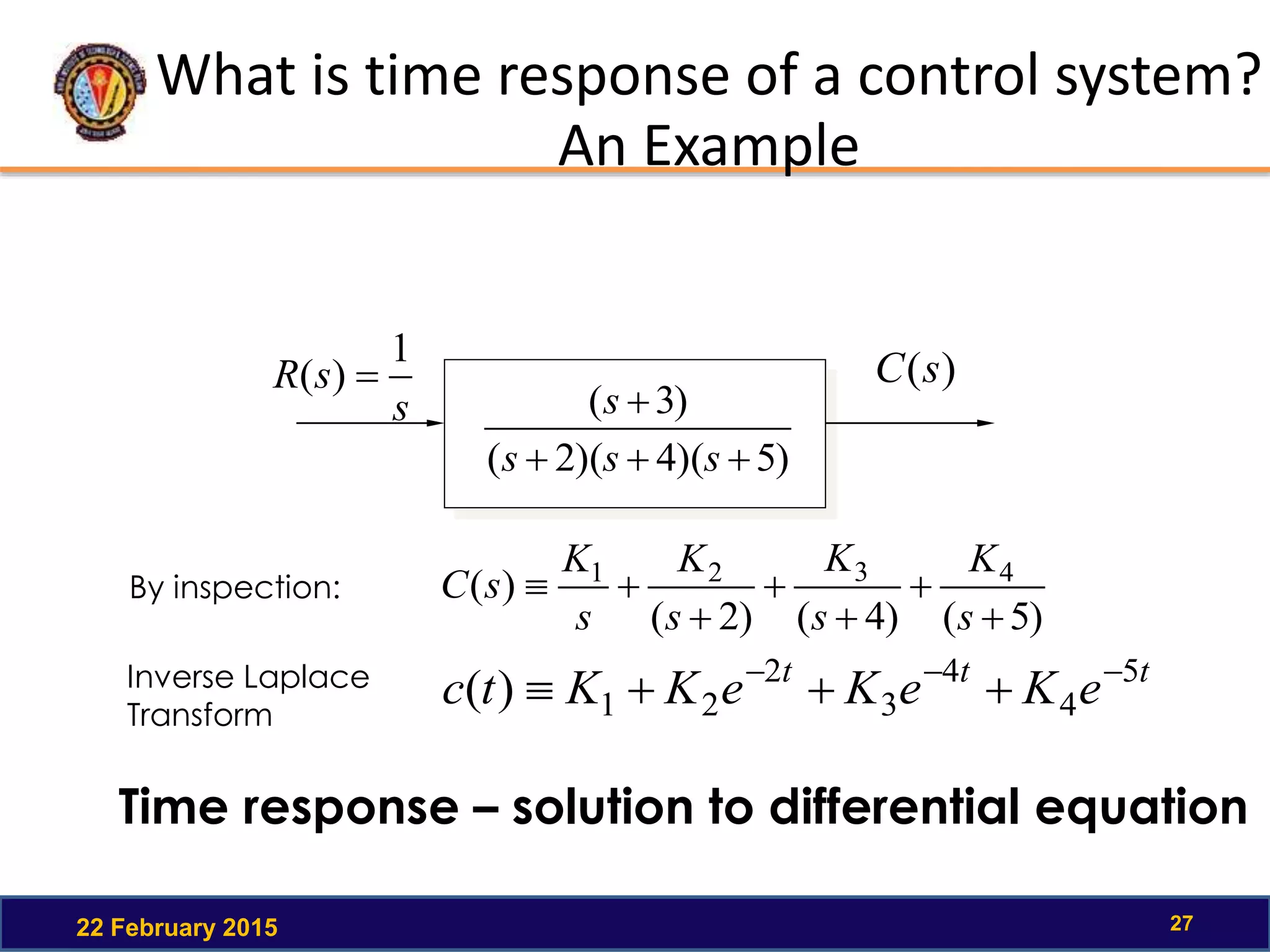
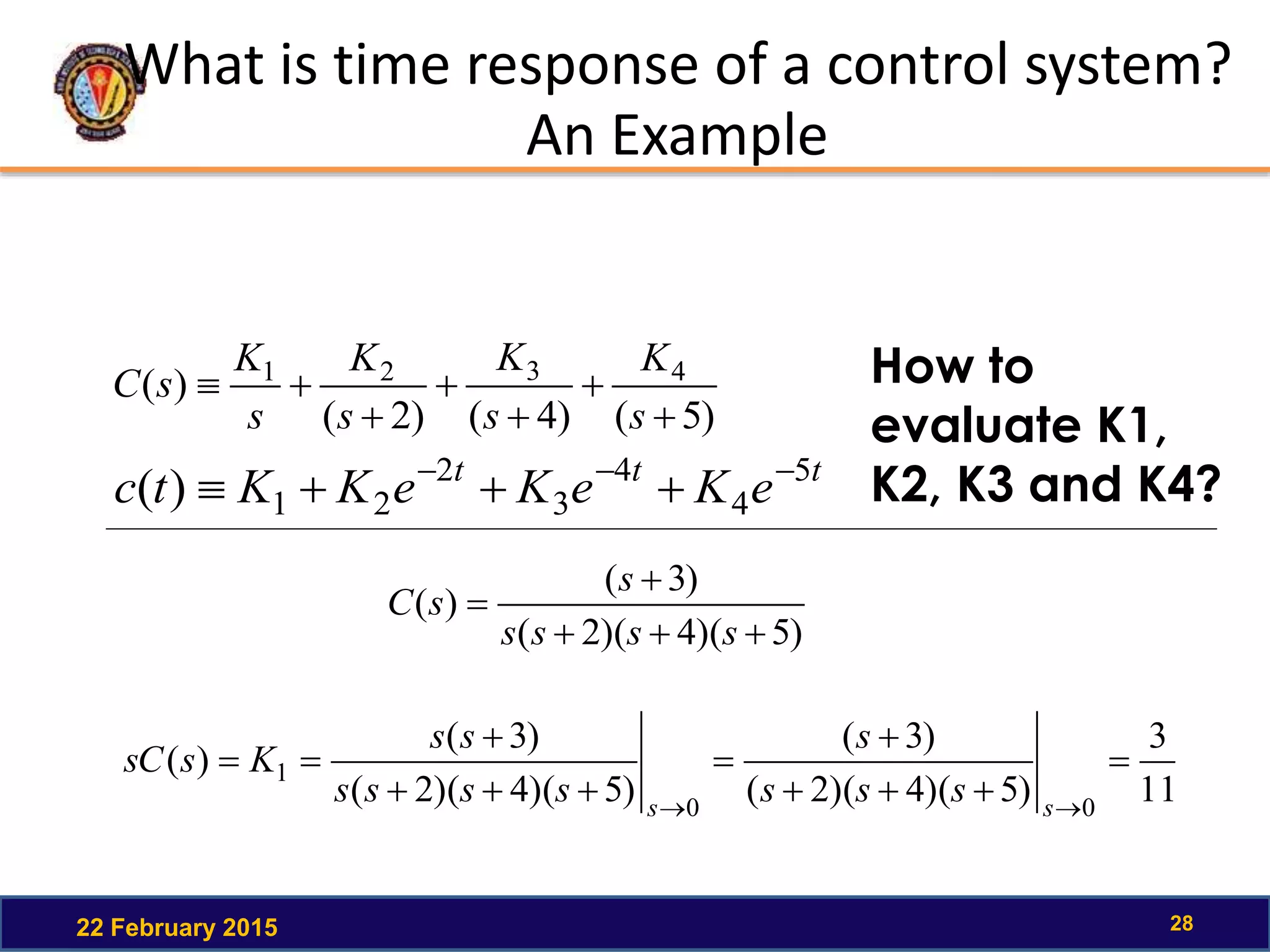
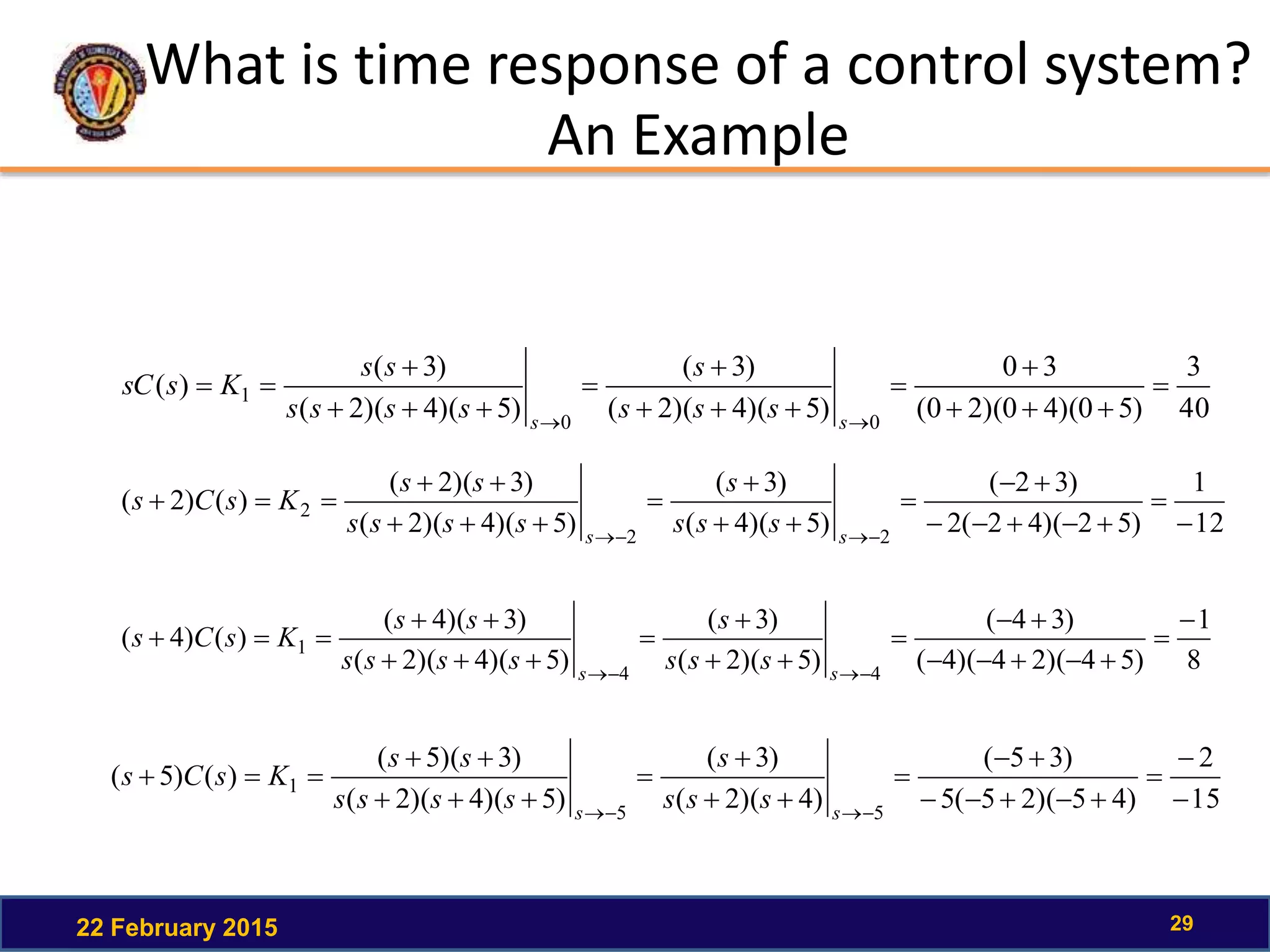
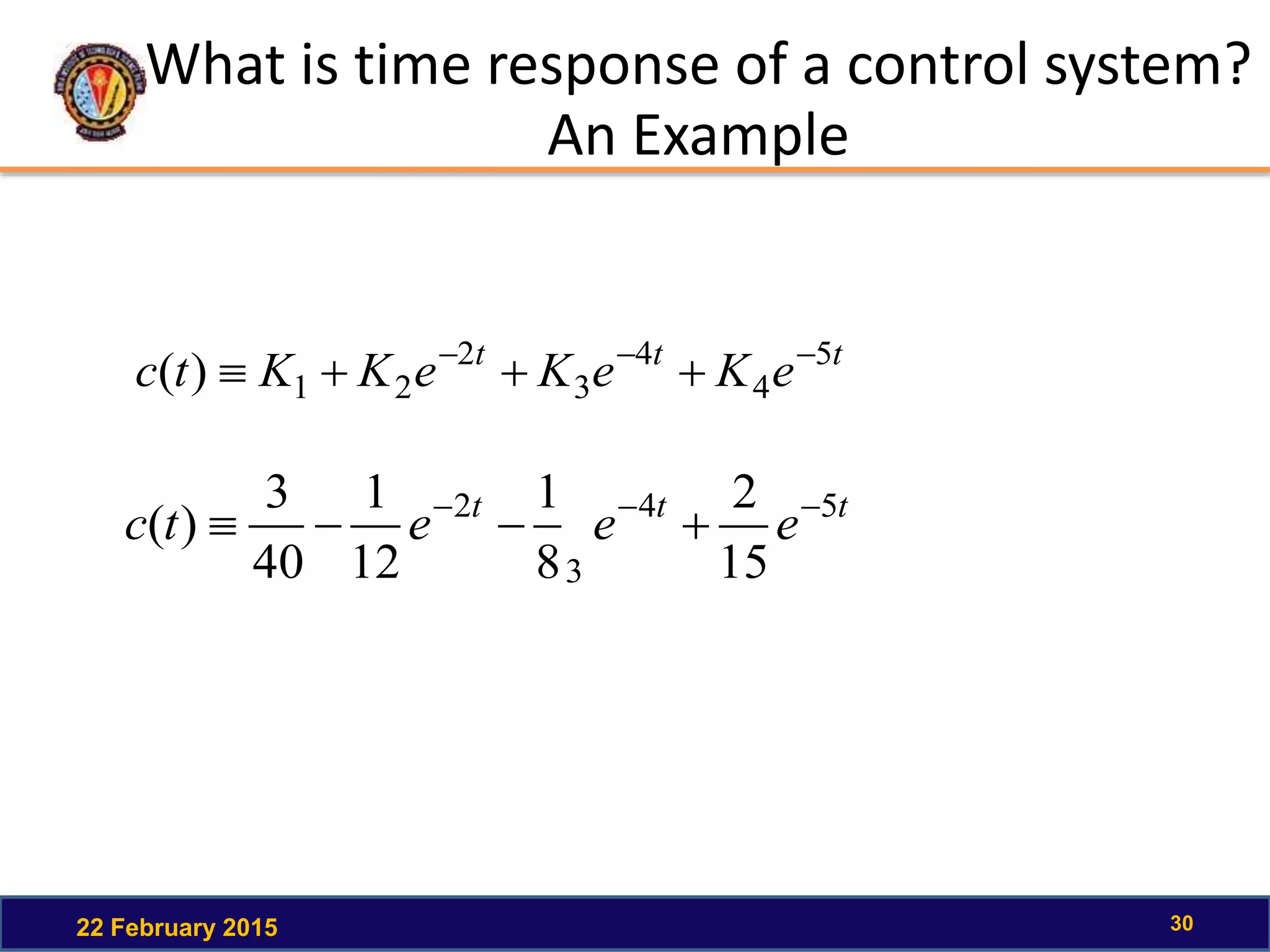
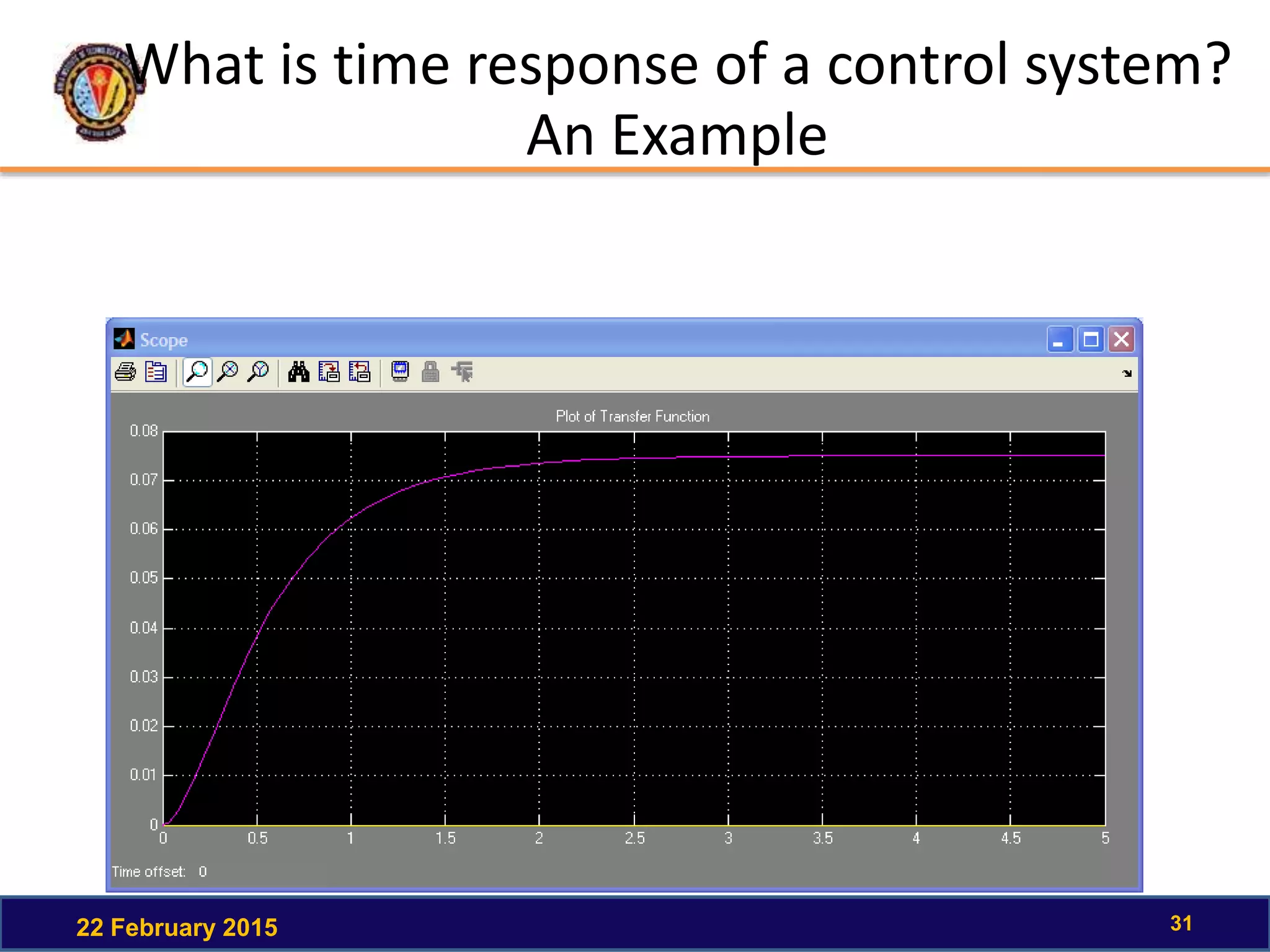
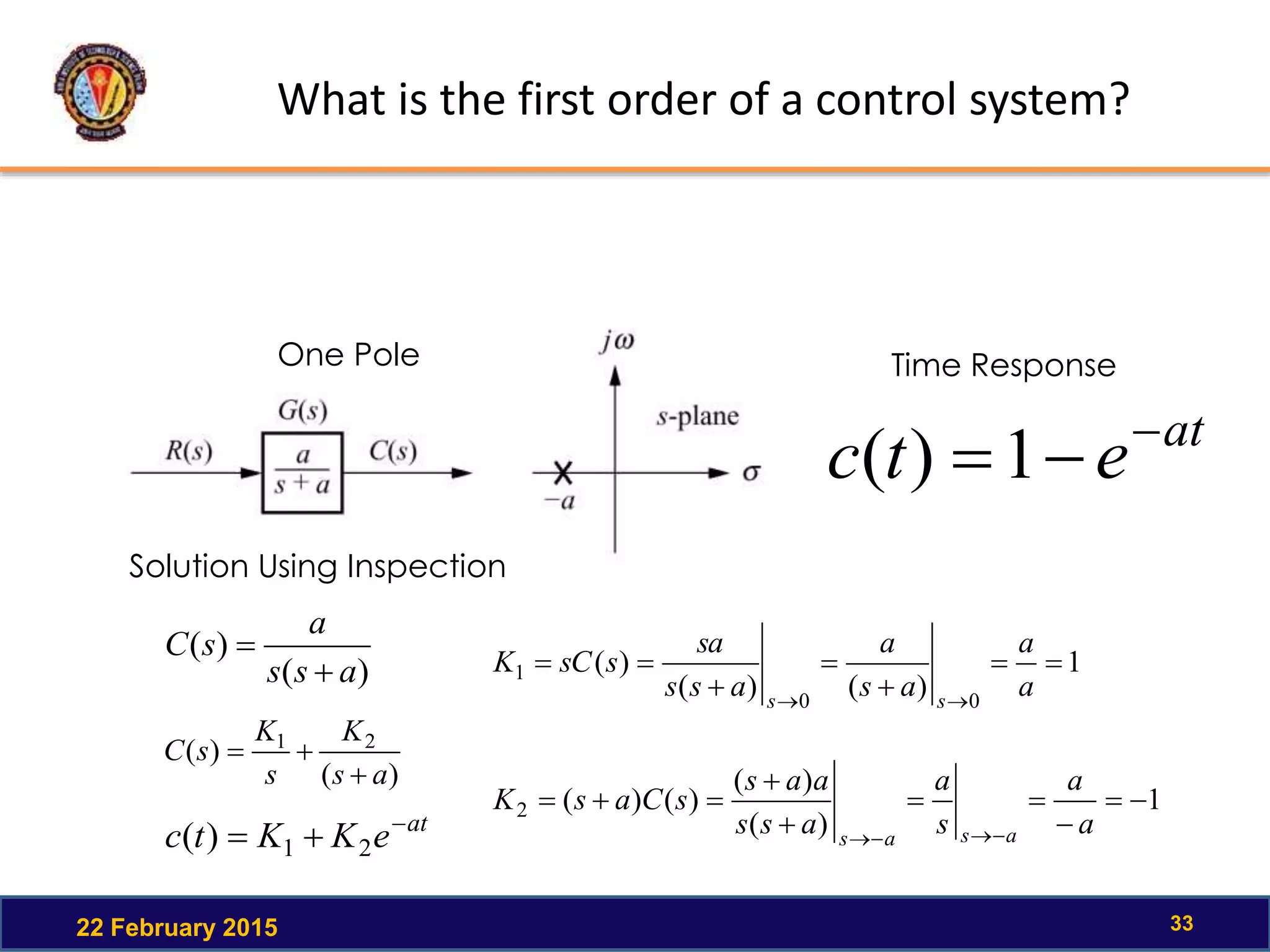
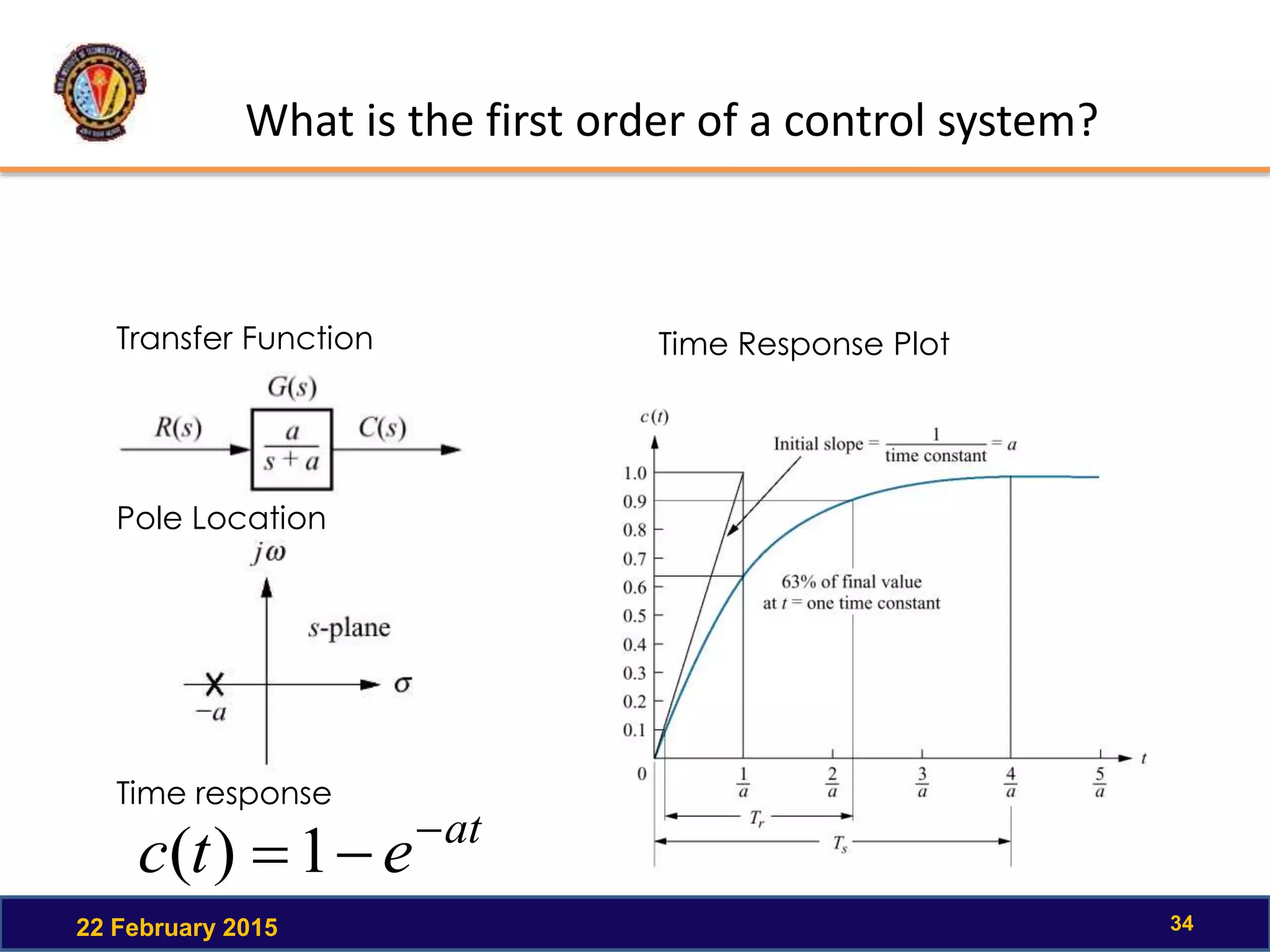
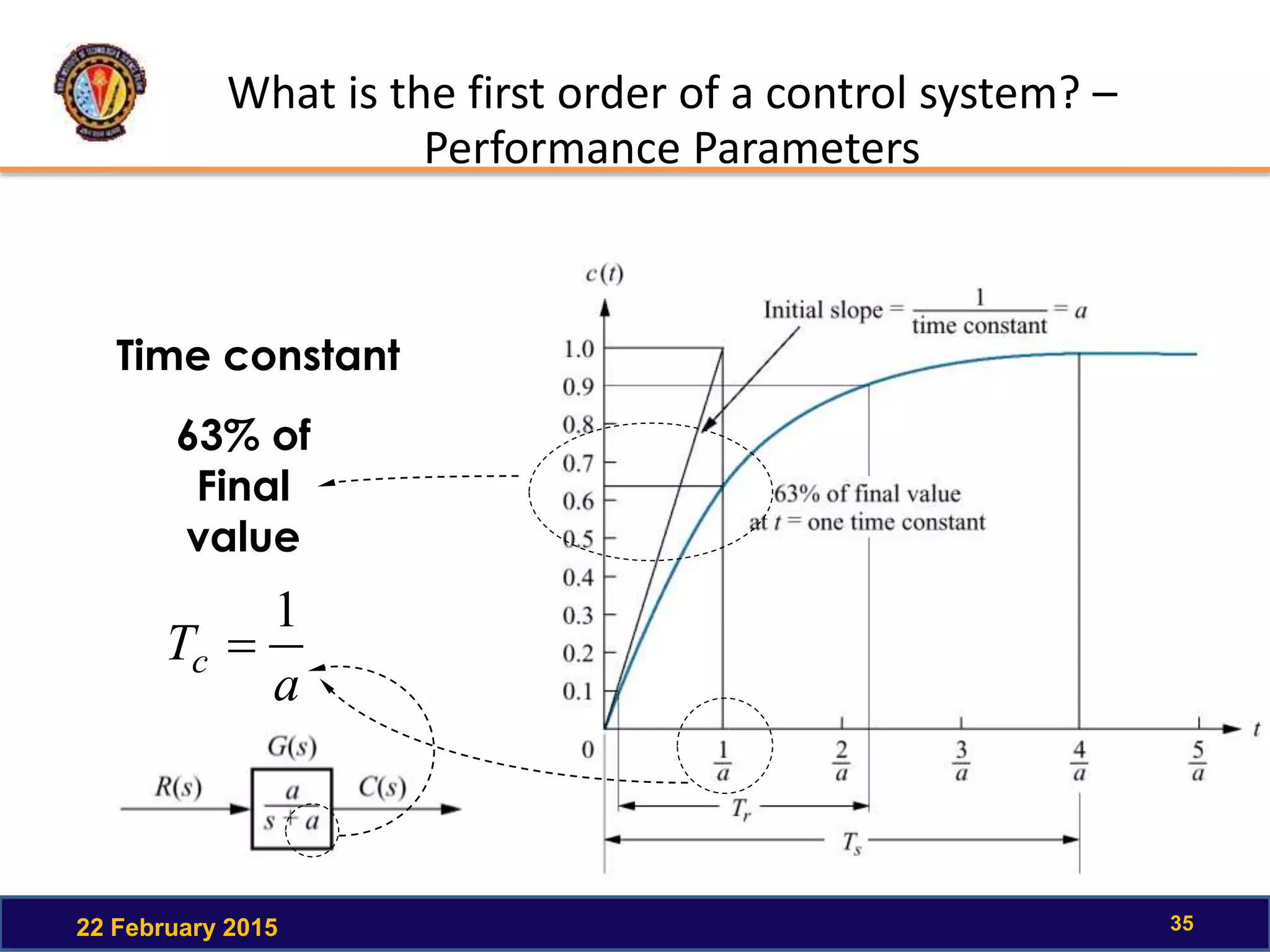
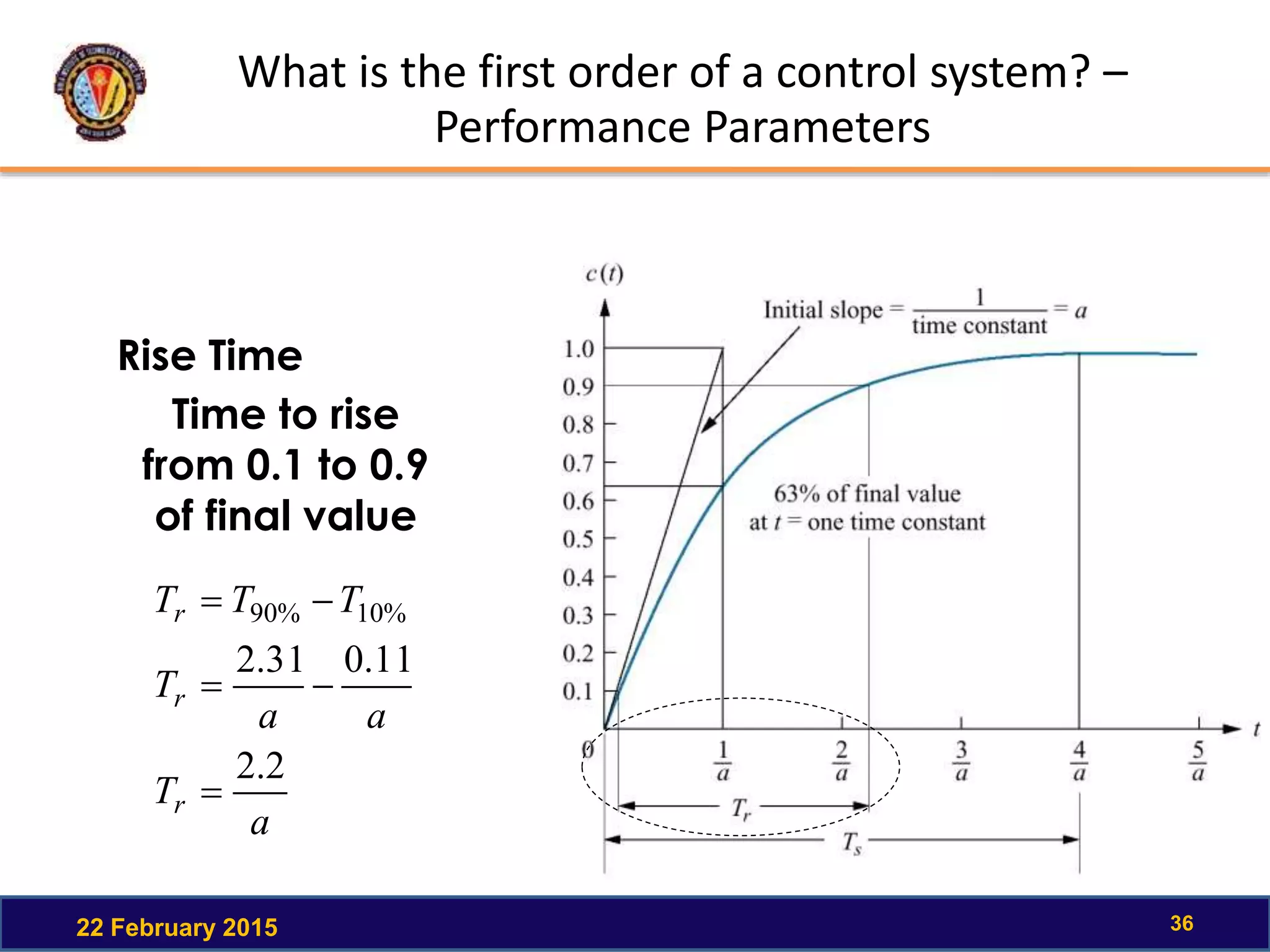
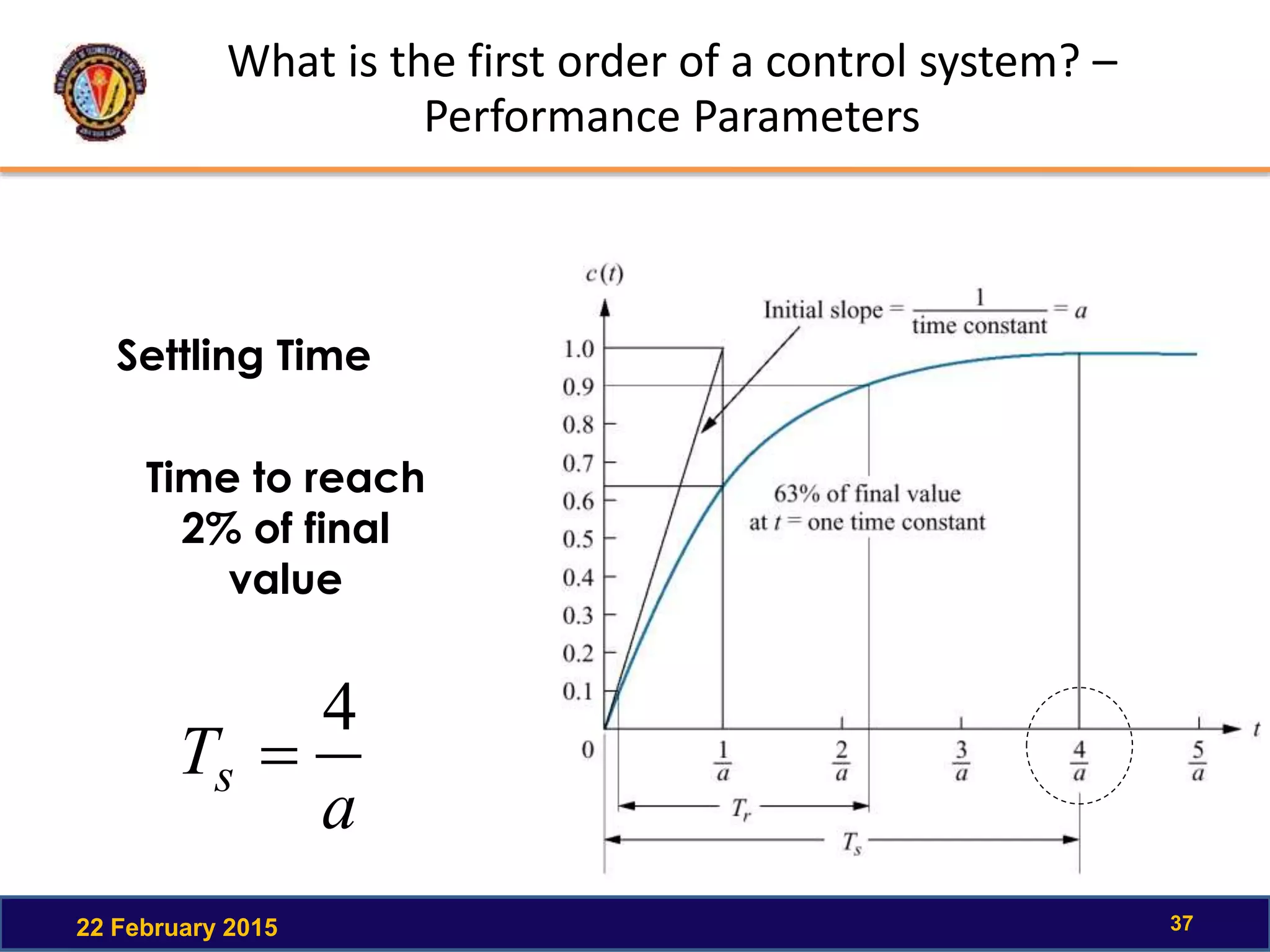
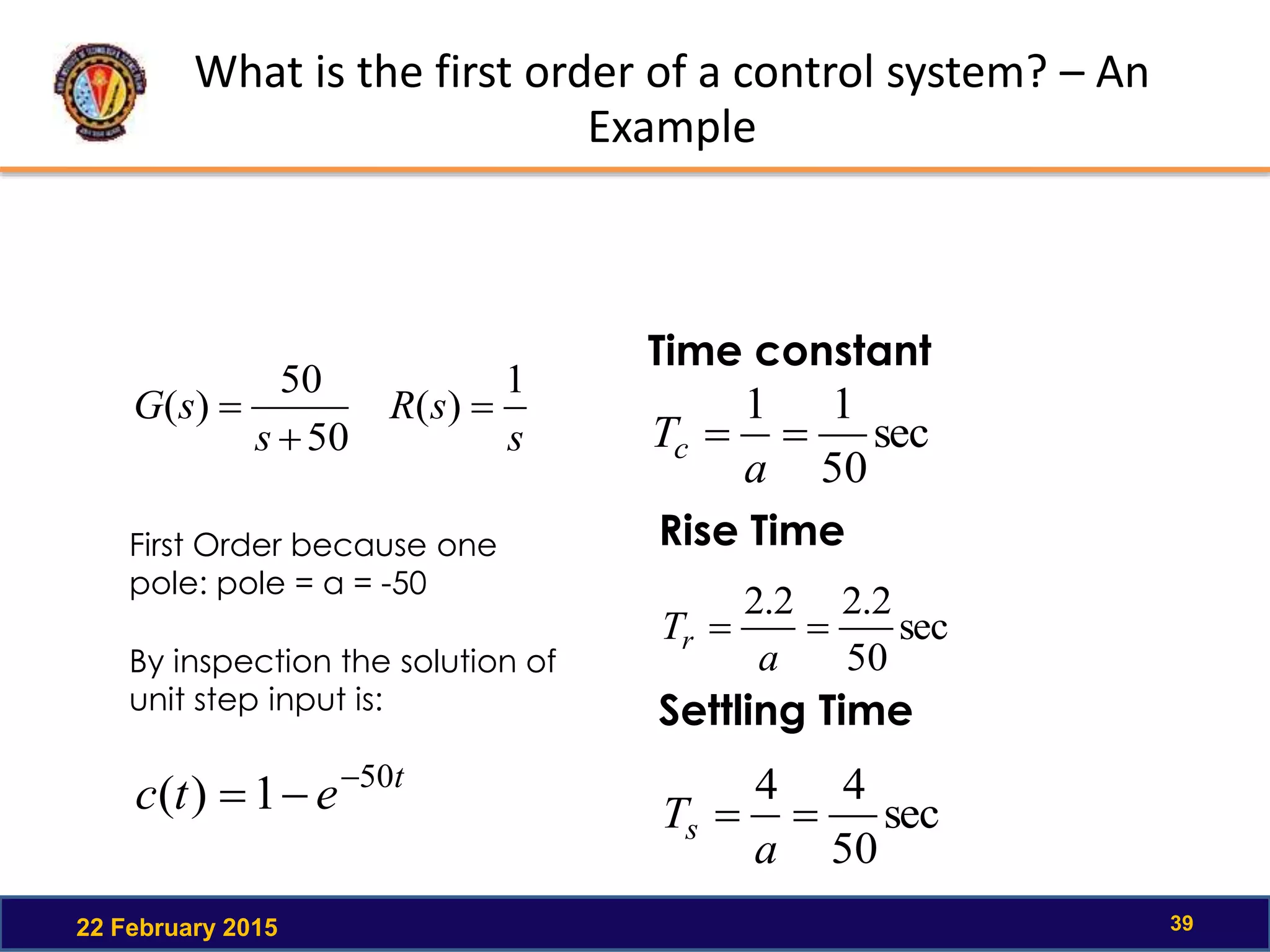
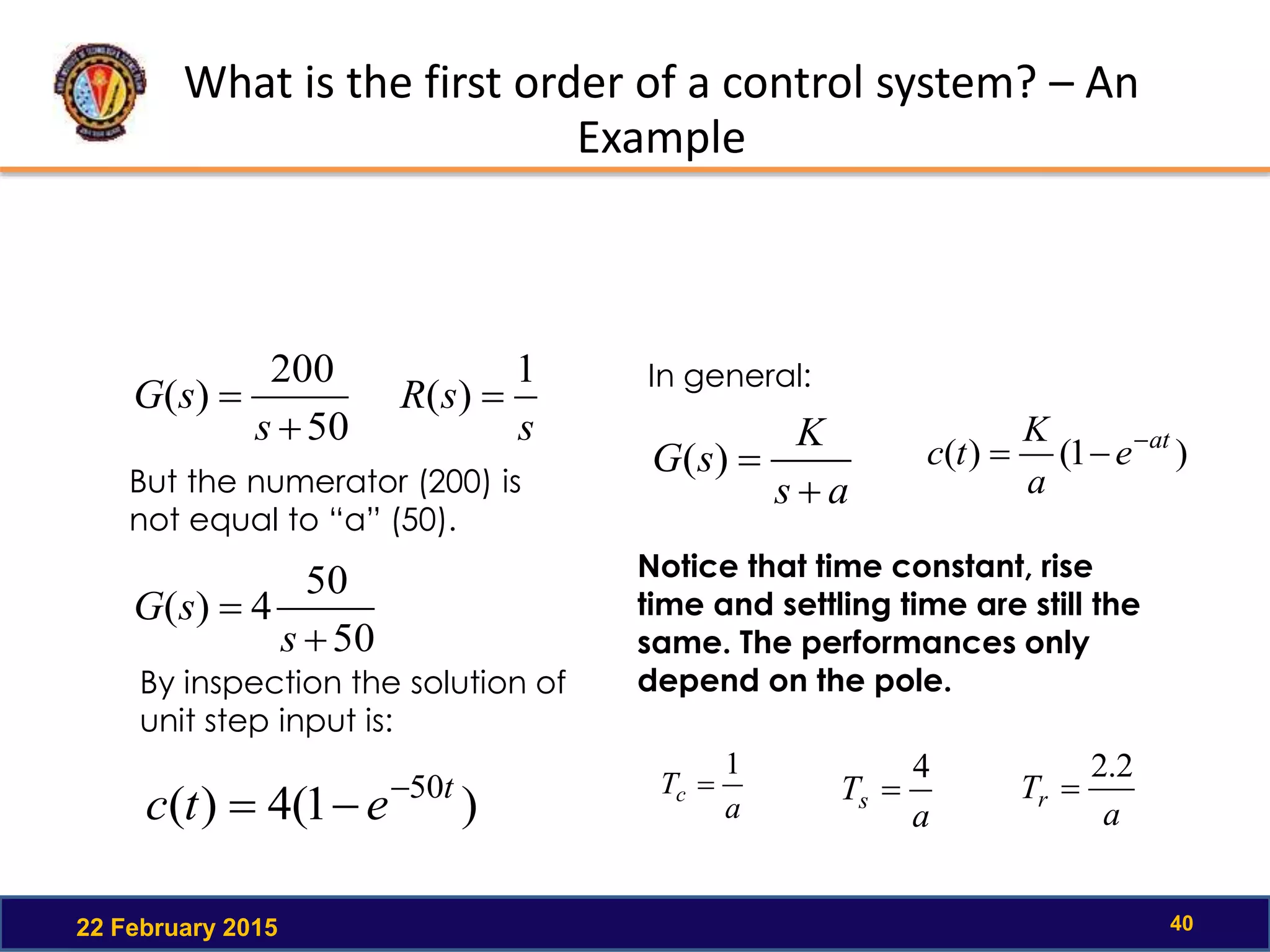
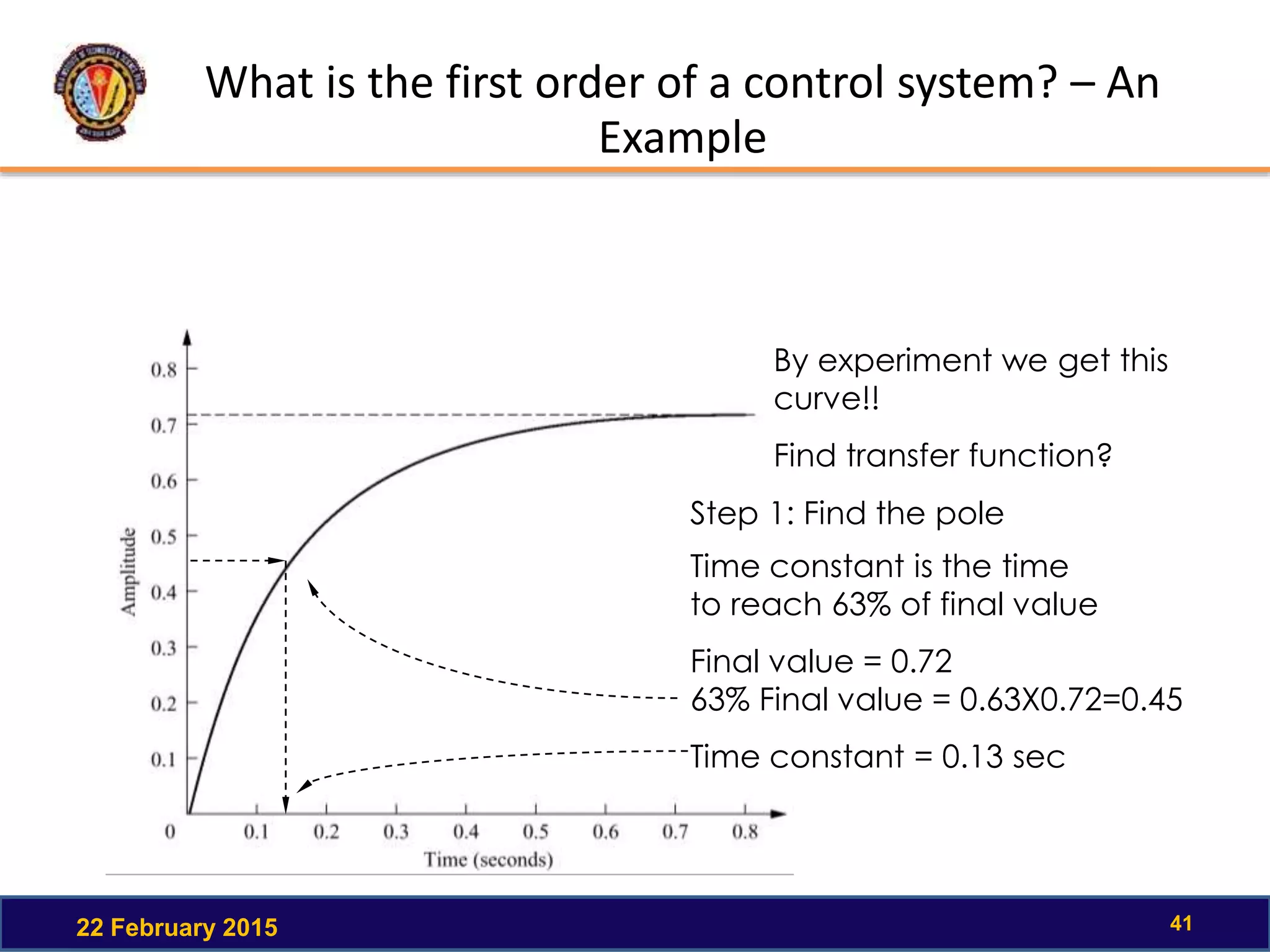
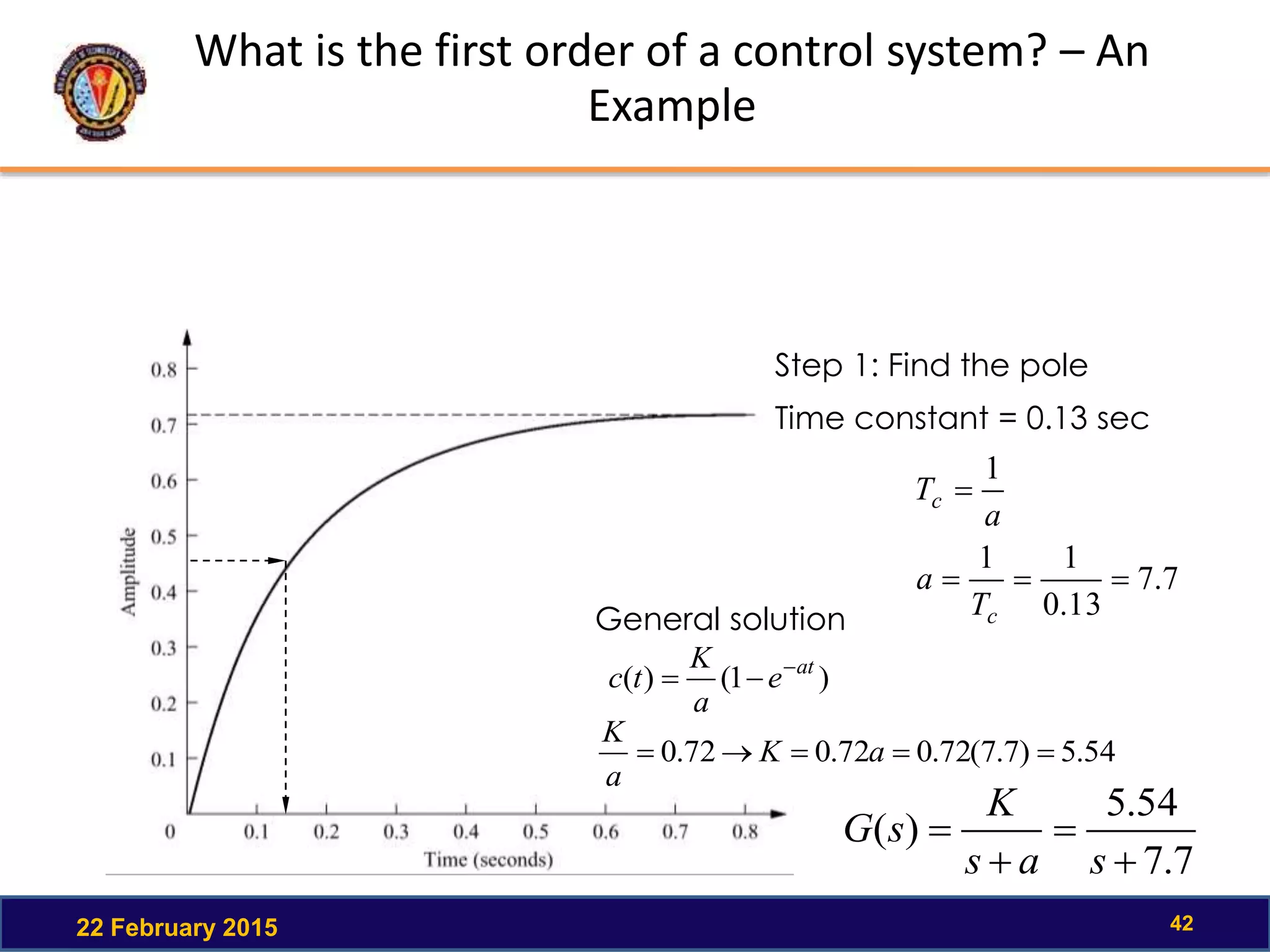
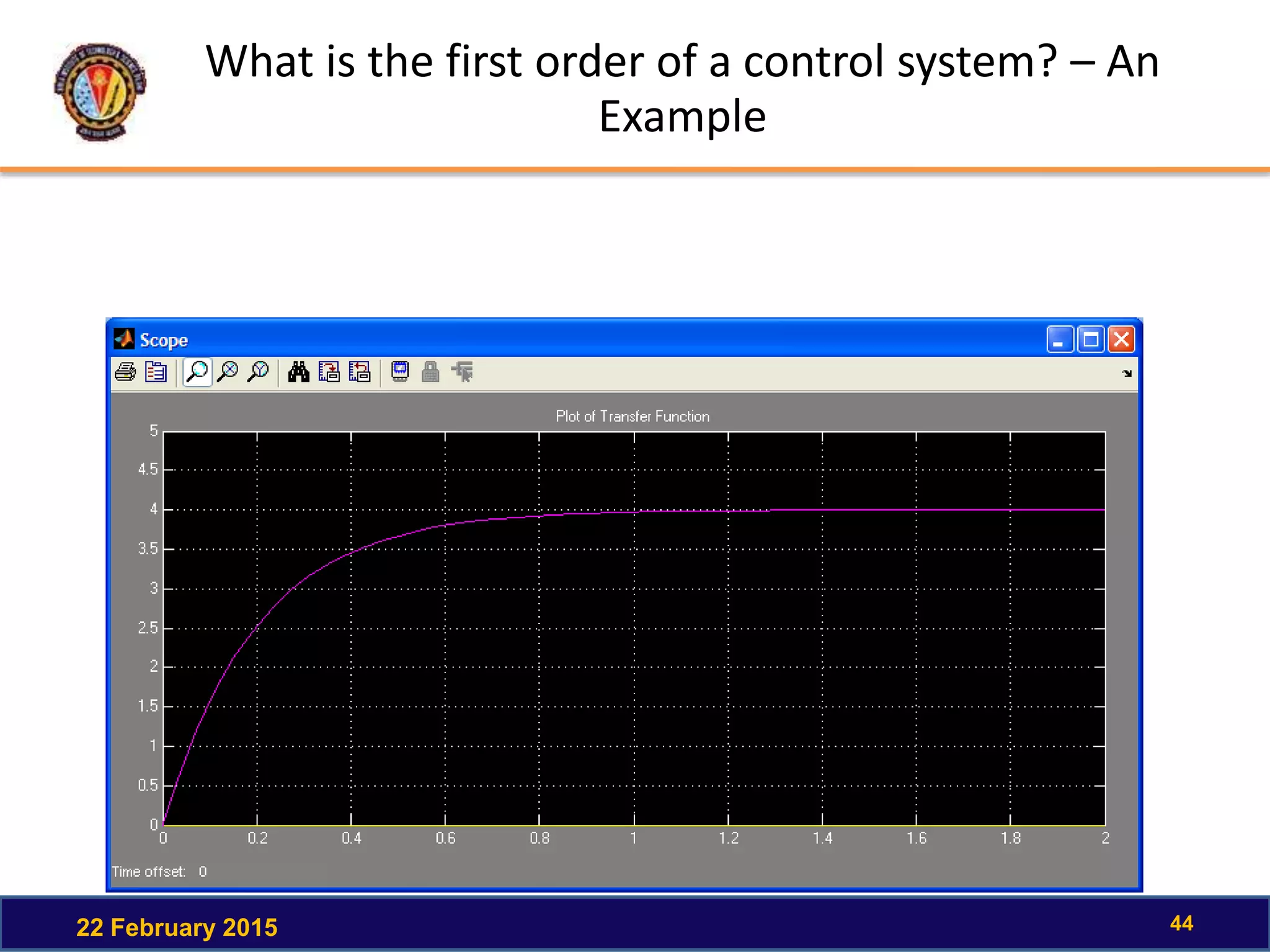
The document discusses the time response of first order systems. It defines time response as the solution to a differential equation over time. Time response consists of the natural response and forced response, and is characterized by transient and steady-state responses on a time response plot. The time constant of a first order system is the time it takes to reach 63% of its final value. Transfer functions can be used to find the system's poles and zeros, which indicate the time response.