Downloaded 136 times

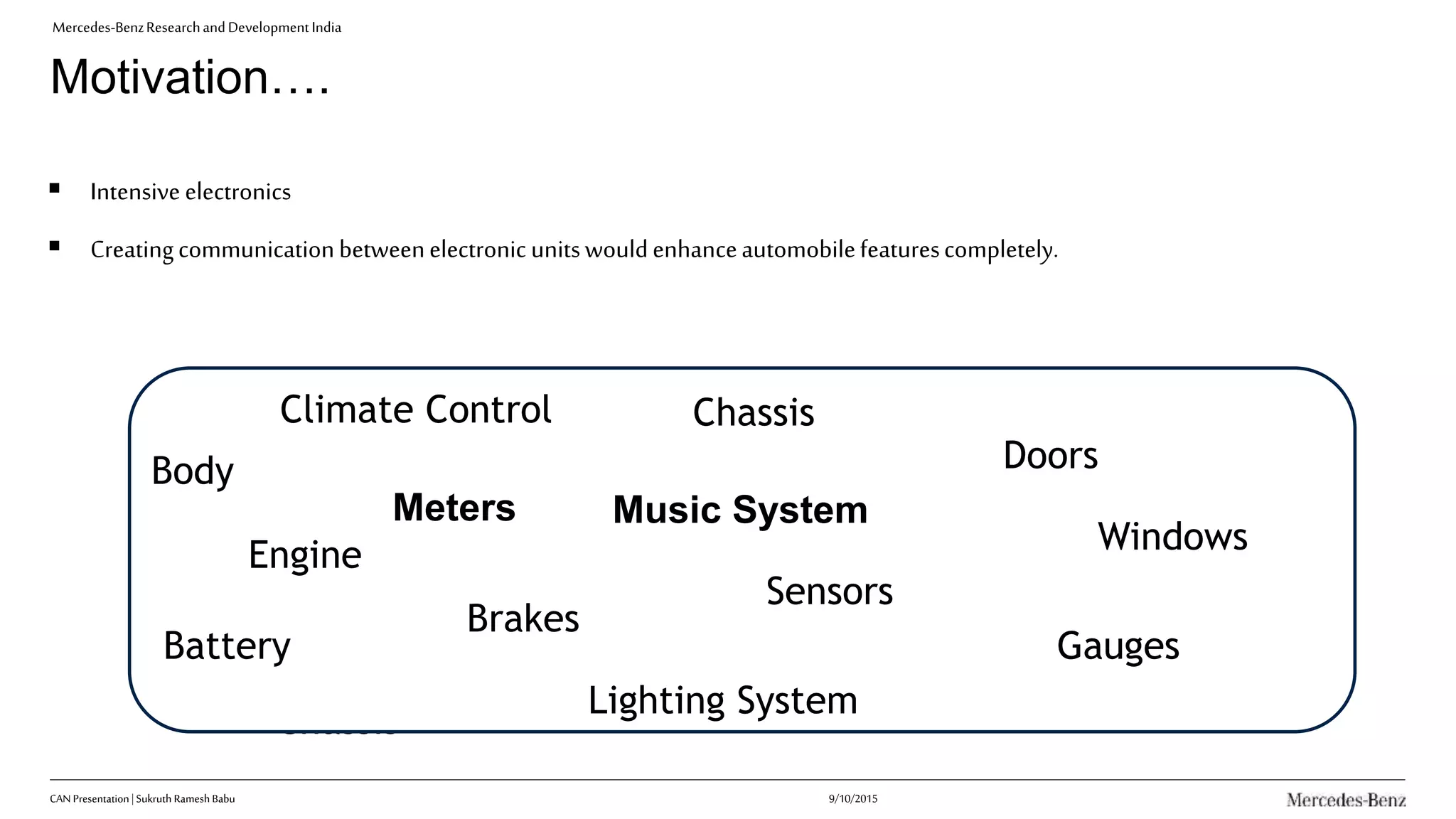
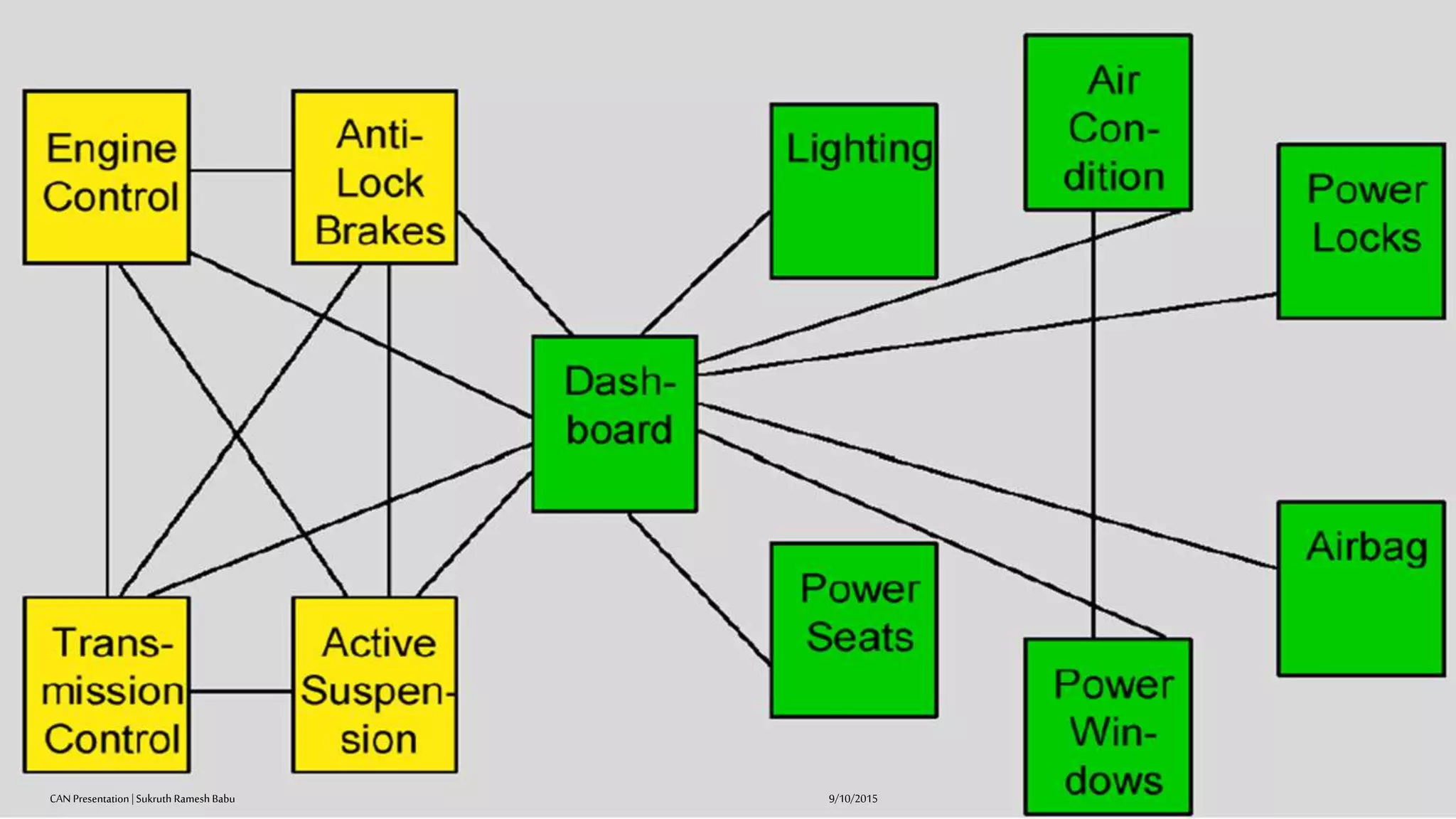
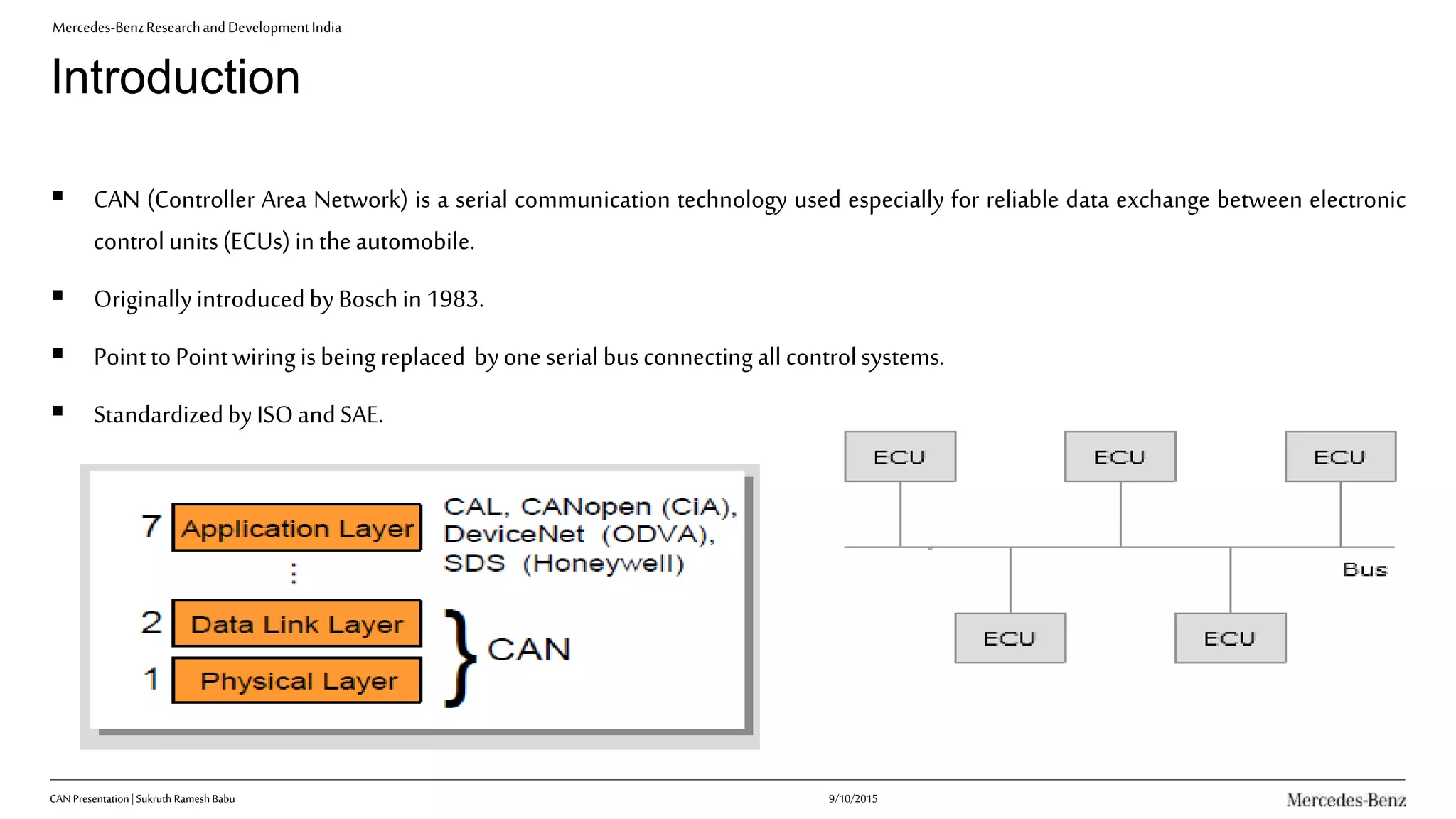
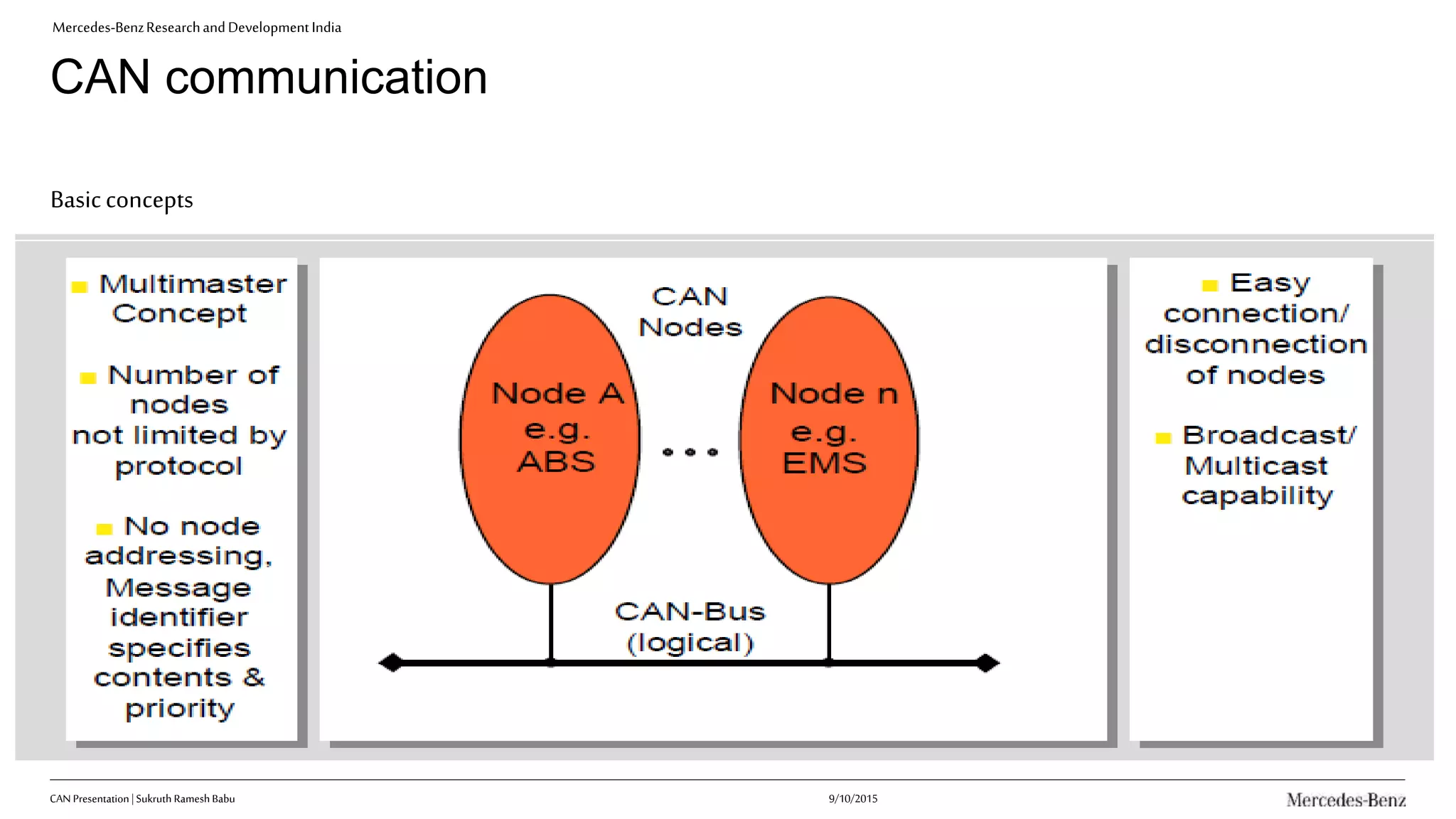
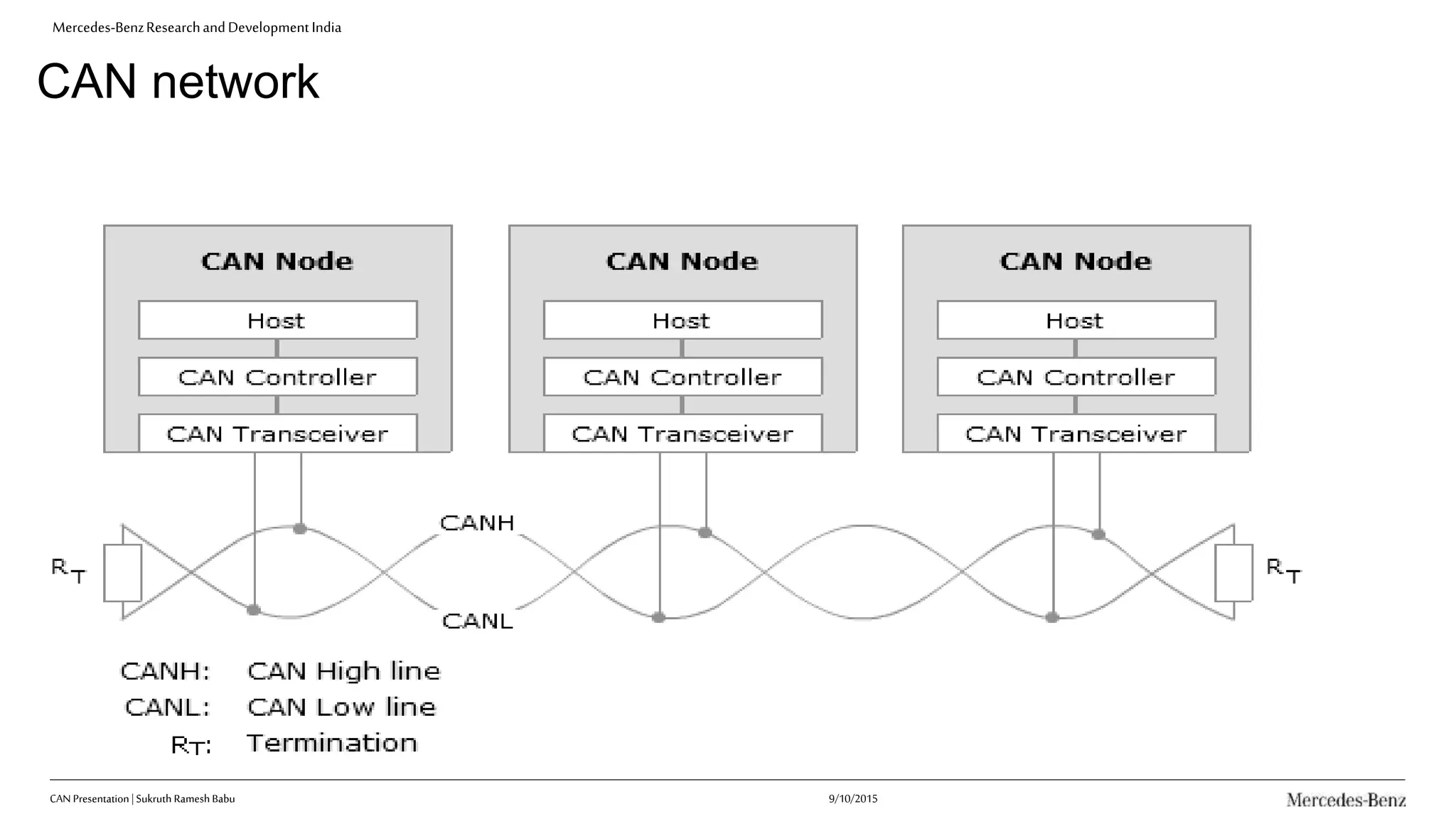
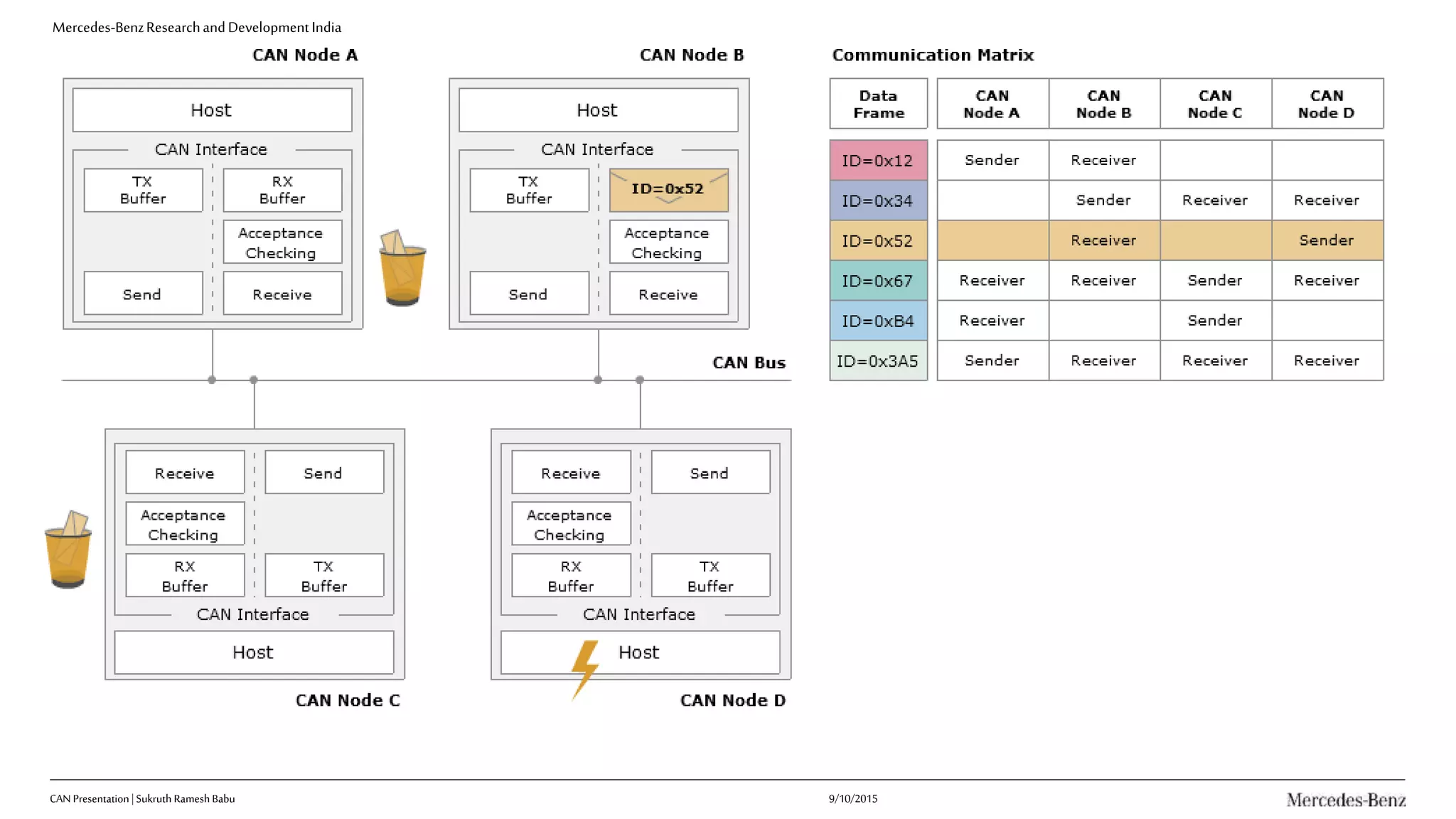
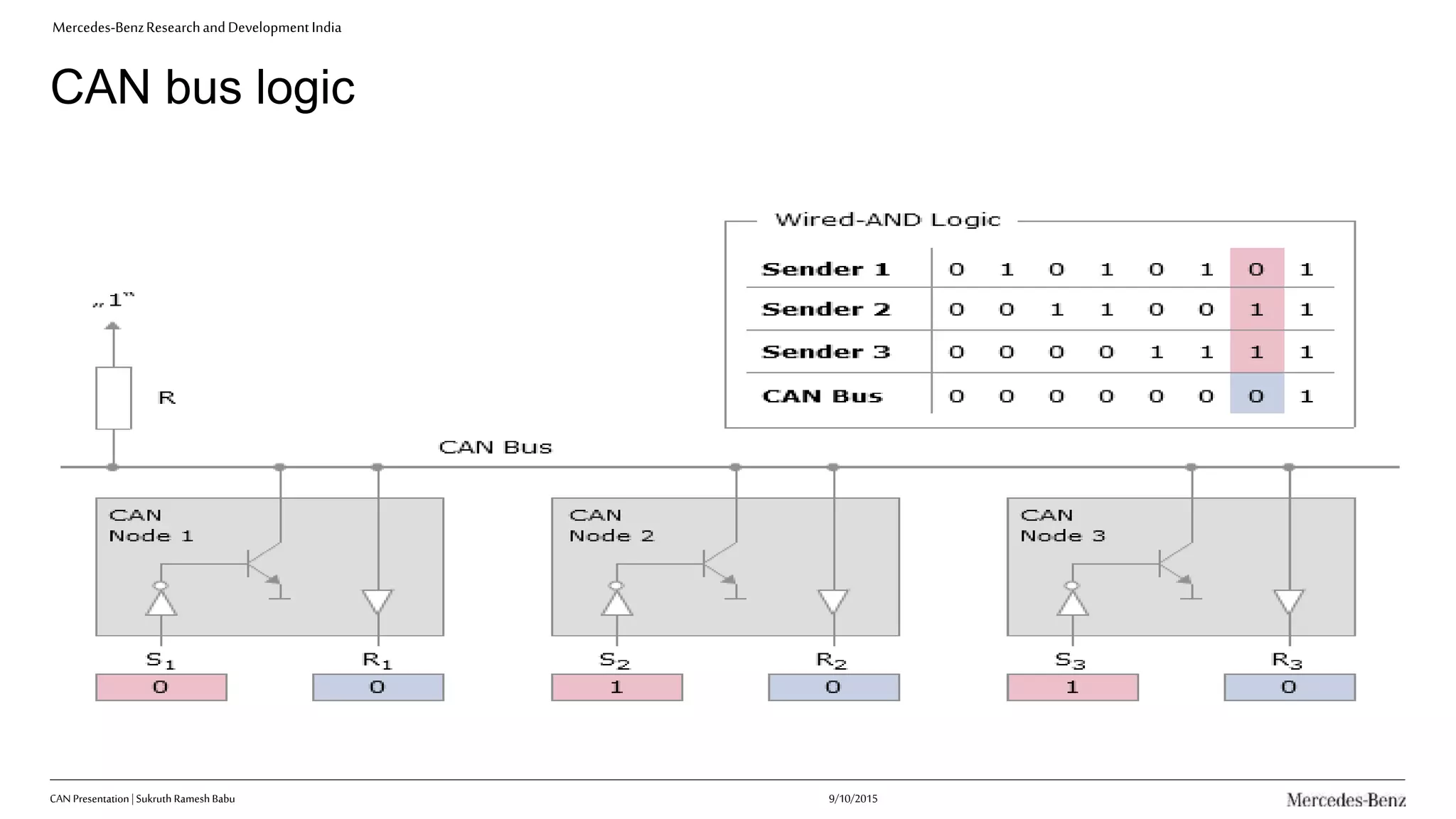
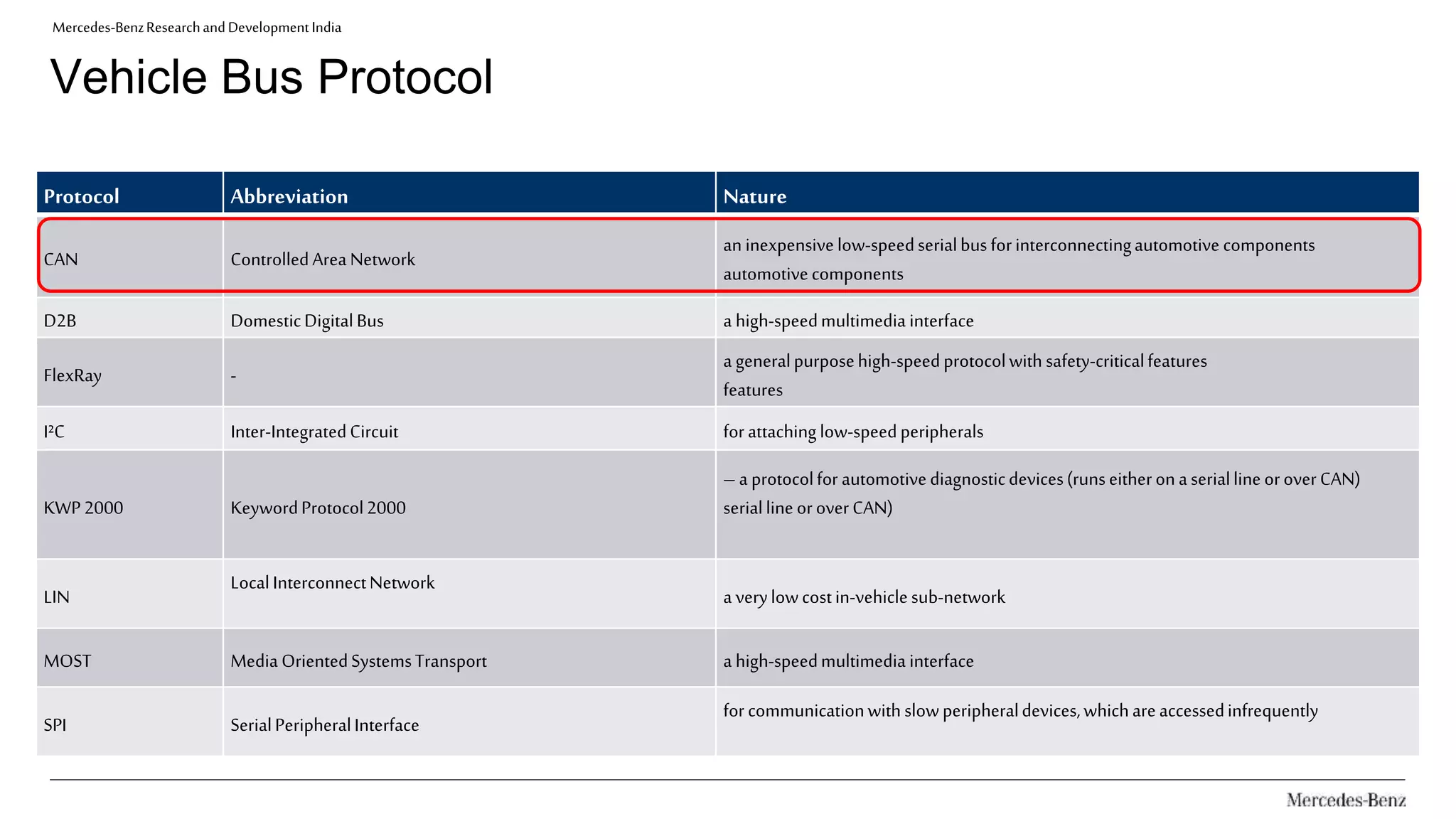
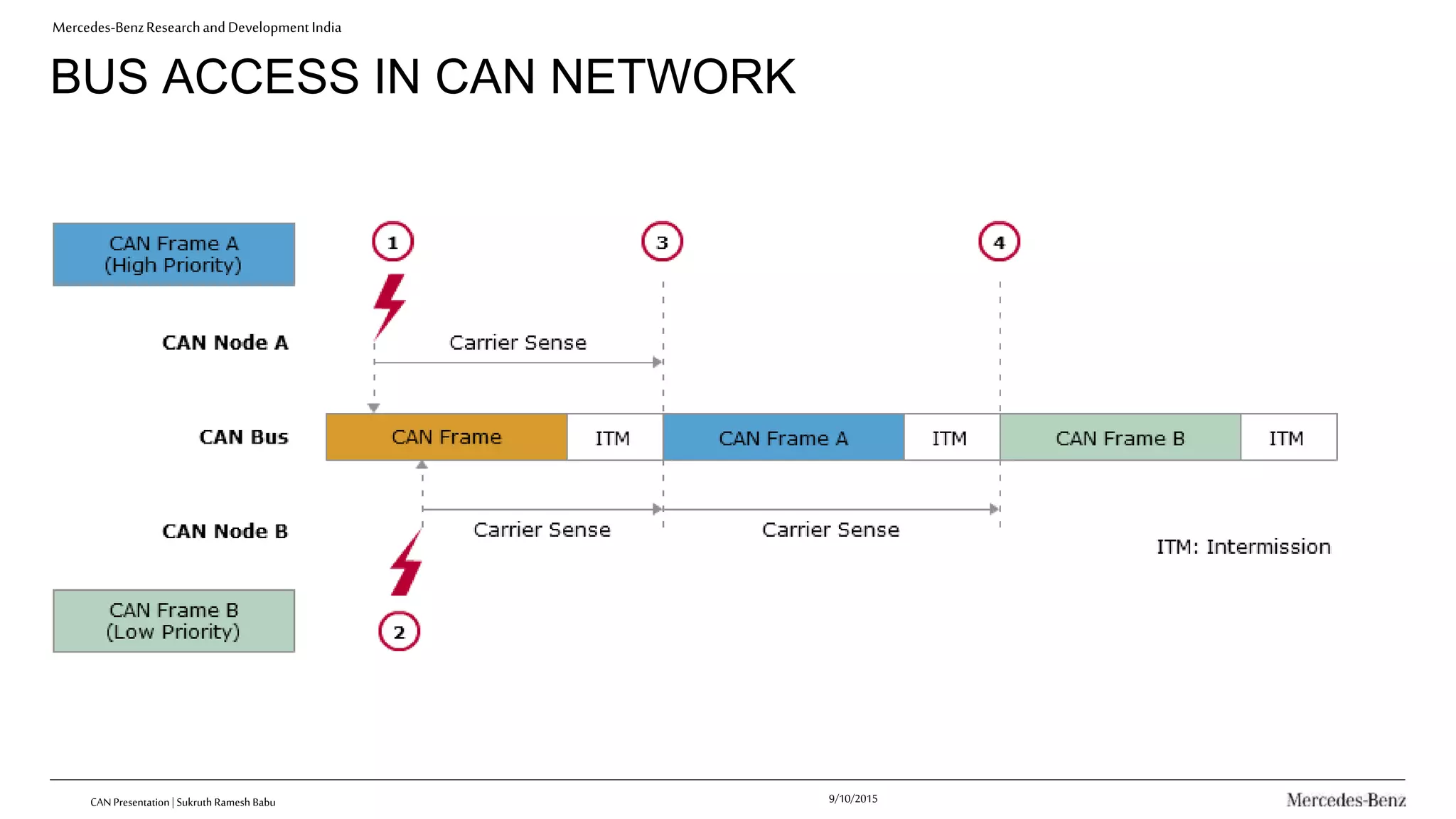
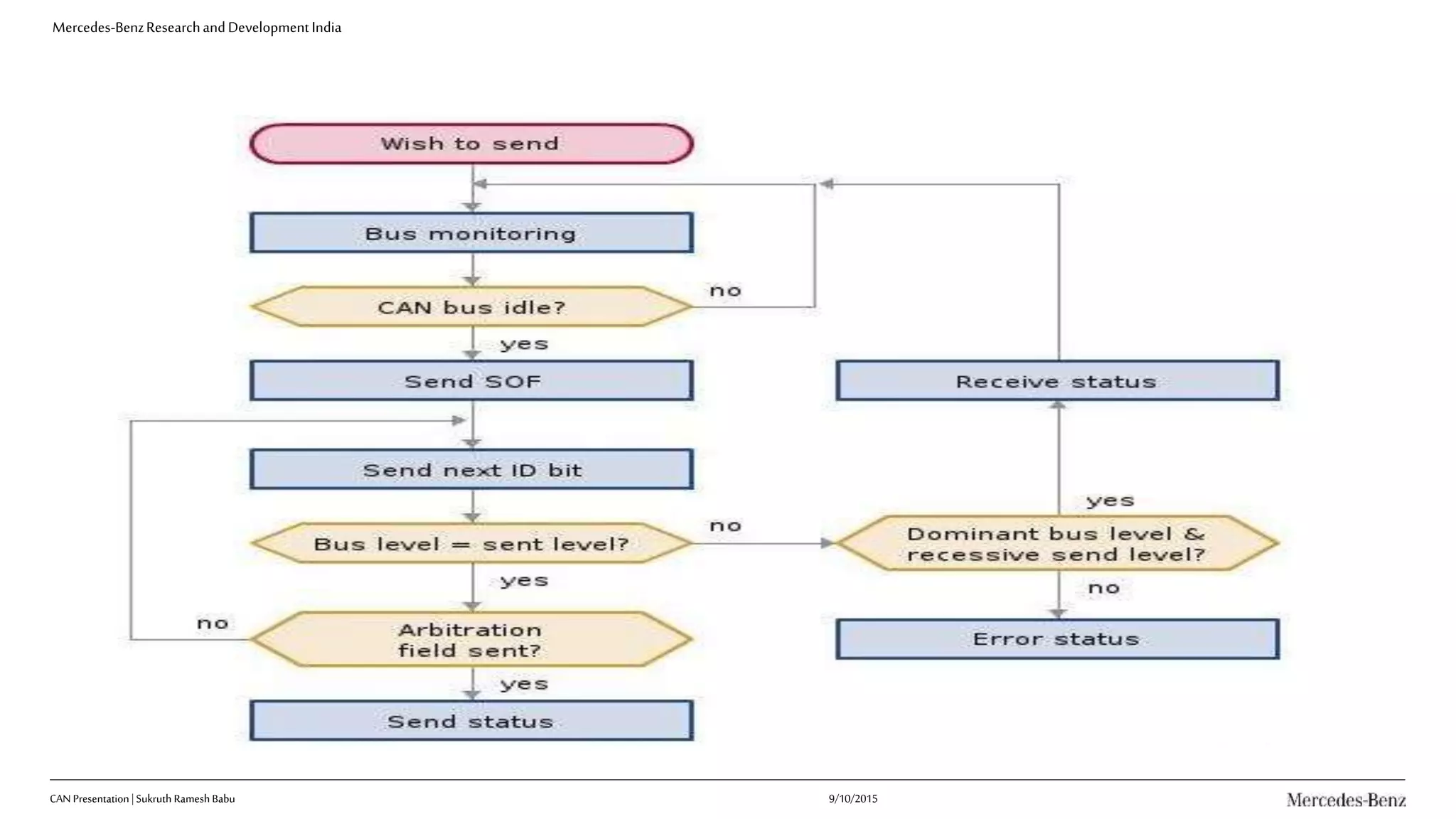
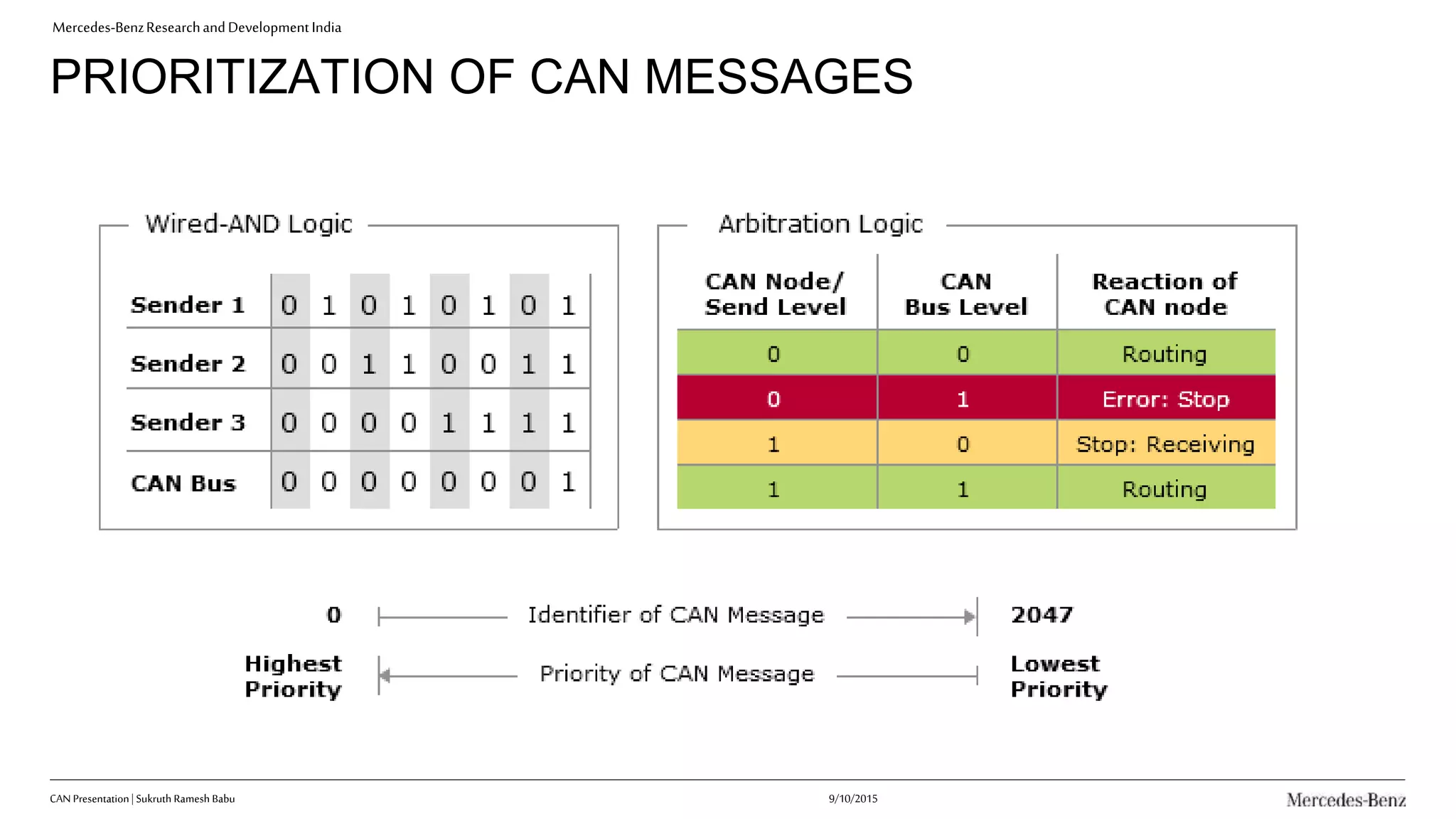
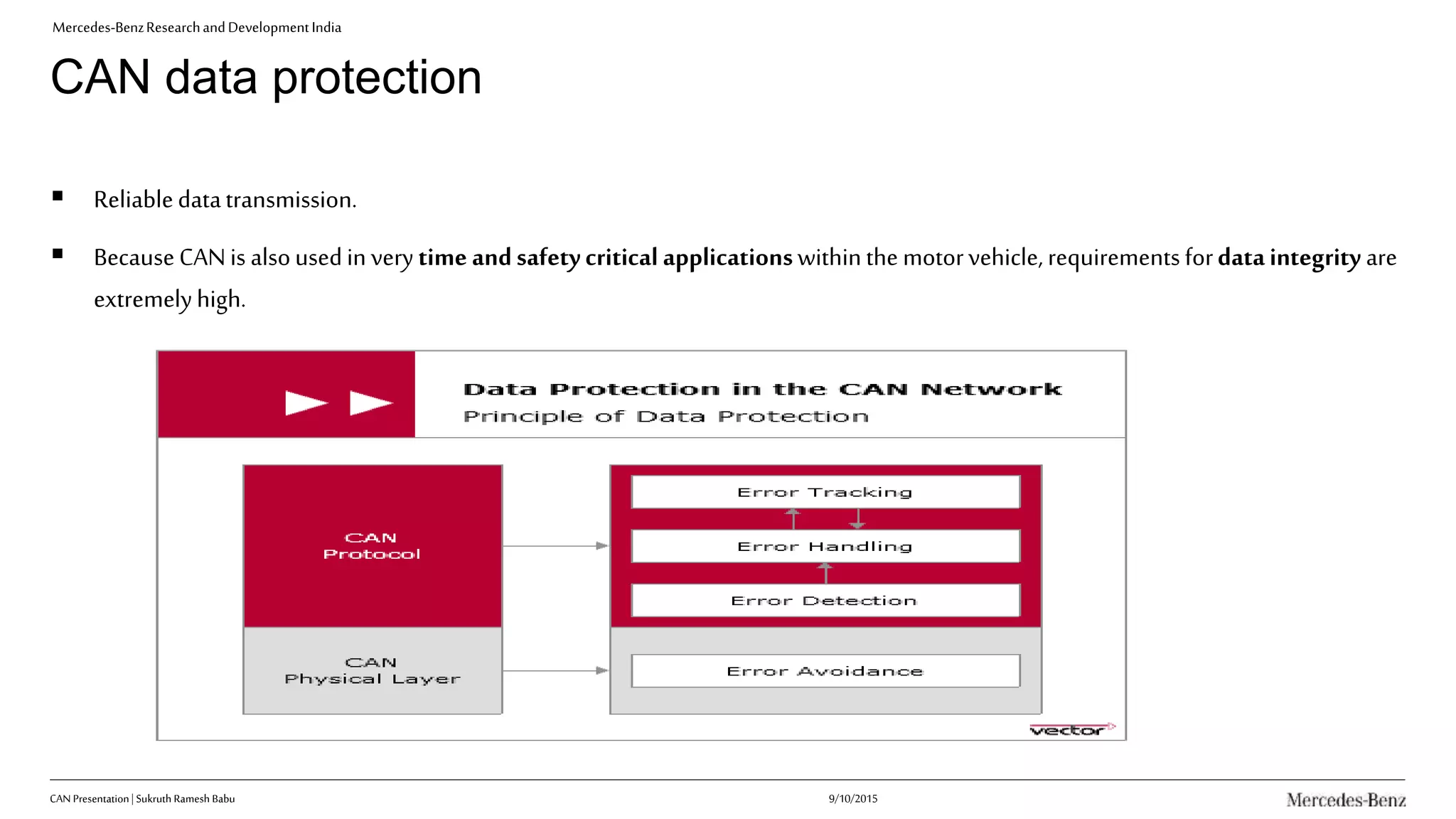
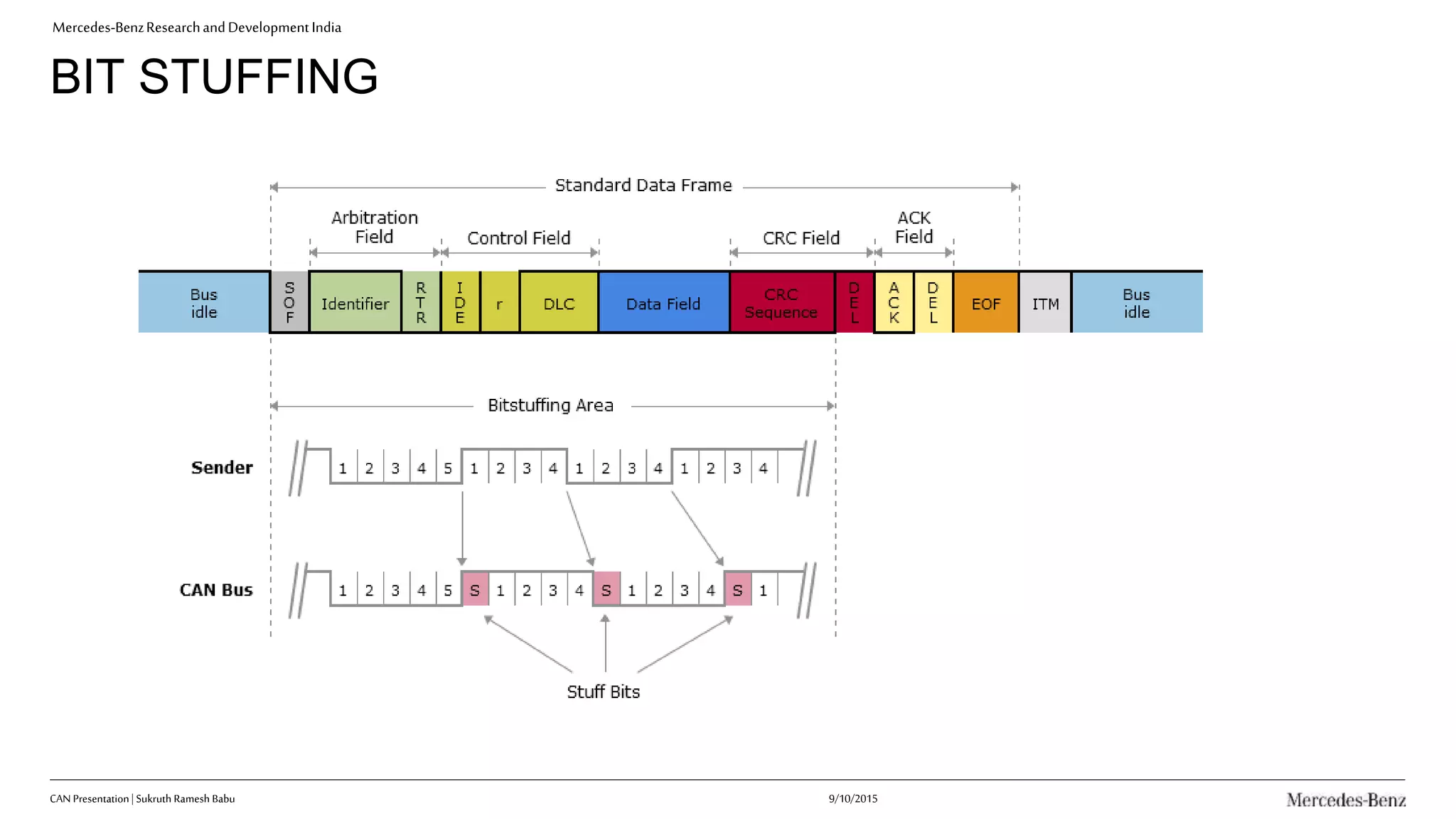
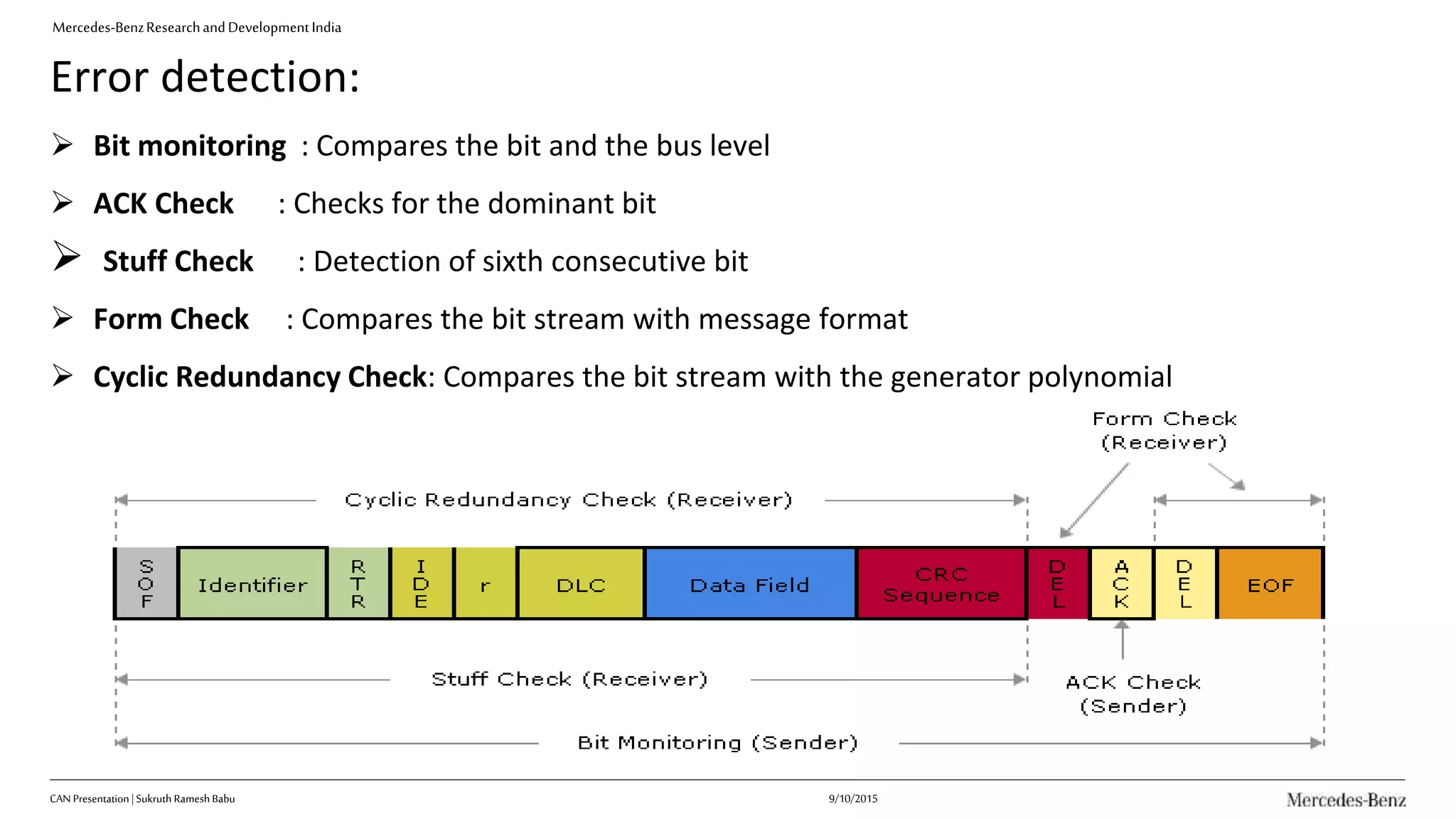
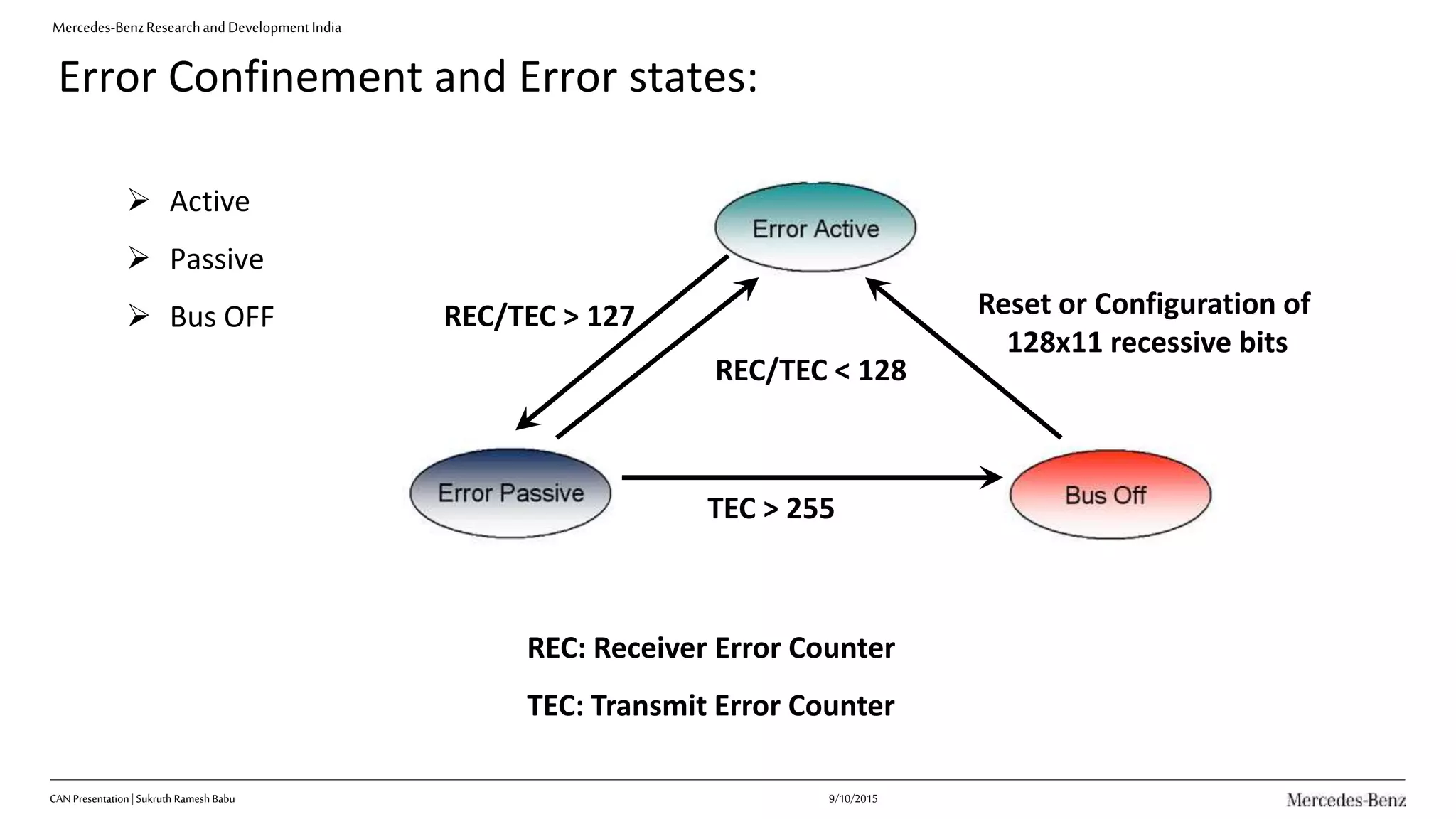

This document discusses Controller Area Network (CAN) communication technology used in automobiles. It begins by motivating the need for electronic communication between vehicle components to enhance features. It then introduces CAN, which uses a serial bus to connect electronic control units. The presentation covers CAN framing, bus access, prioritization of messages, and data protection methods like error detection checks, bit stuffing, and error confinement states. The goal is to reliably transmit data between nodes in a CAN network.



































































