
Recommended
More Related Content
Similar to 7__Matematichnii_opis_roboti_SAR.pdf
Similar to 7__Matematichnii_opis_roboti_SAR.pdf (14)
More from ssuser5136e4
More from ssuser5136e4 (20)
Recently uploaded
Recently uploaded (15)
7__Matematichnii_opis_roboti_SAR.pdf
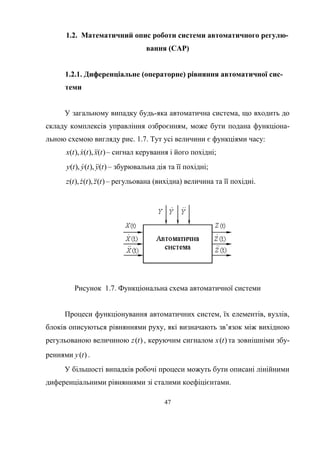
- 1. 47 1.2. Математичний опис роботи системи автоматичного регулю- вання (САР) 1.2.1. Диференціальне (операторне) рівняння автоматичної сис- теми У загальному випадку будь-яка автоматична система, що входить до складу комплексів управління озброєнням, може бути подана функціона- льною схемою вигляду рис. 1.7. Тут усі величини є функціями часу: ( ), ( ), ( ) x t x t x t – сигнал керування і його похідні; ( ), ( ), ( ) y t y t y t – збурювальна дія та її похідні; ( ), ( ), ( ) z t z t z t – регульована (вихідна) величина та її похідні. Рисунок 1.7. Функціональна схема автоматичної системи Процеси функціонування автоматичних систем, їх елементів, вузлів, блоків описуються рівняннями руху, які визначають зв’язок між вихідною регульованою величиною z( ) t , керуючим сигналом x( ) t та зовнішніми збу- реннями y( ) t . У більшості випадків робочі процеси можуть бути описані лінійними диференціальними рівняннями зі сталими коефіцієнтами.
- 2. 48 У загальному випадку для автоматичних систем запишемо: y c dt z d c dt y d c dt y d c x b dt dx b dt x d b dt x d b z a dt z d a dt z d a dt z d a k k k k k k m m m m m m n n n n n n 0 1 1 1 1 1 0 1 1 1 1 0 1 1 1 1 1 ... ... ... (1.1) де ai, bi, ci – сталі коефіцієнти, що визначаються параметрами автоматичної системи. Для найскладніших автоматичних систем, наприклад систем стабілі- зації танкового озброєння, диференціальні рівняння їх руху мають поря- док, вищий за восьмий. Розв’язання їх традиційними методами досить складно. Тому для розв’язання задач у теорії автоматичного регулювання застосовується символічна алгебраїзація диференціальних рівнянь опера- торним методом. Сутність цього методу полягає у формальному відділен- ні операції диференціювання від змінної, що диференціюється. Відділення виконується введенням умовного позначення операції диференціювання символом р, який називається оператором і має степінь, що дорівнює по- рядку похідної / ; / . n n n dx dt px d z dt p z Диференціальне рівняння, записане в операторній формі, називається операторним рівнянням. В операторному рівнянні змінні як і раніше є фу- нкціями часу, а символ диференціювання – оператор p – розглядається як сталий алгебраїчний множник, з яким можна виконувати усі відомі алгеб- раїчні операції. За цієї умови диференціальне рівняння в операторній фор-
- 3. 49 мі розглядається як звичайне алгебраїчне рівняння, що значно спрощує йо- го запис і розв’язання. З урахуванням зроблених зауважень рівняння (1.1) може бути запи- сано y c py c y p c y p c x b px b x p b x p b z a pz a z p a z p a k k k k m m m m n n n n 0 1 1 1 0 1 1 1 0 1 1 1 ... ... ... (1.2) Оператор у процесі перетворень рівнянь розглядається як стала незалежна величина, що має розмірність [1/c]. Введемо позначення: ) ( ... 0 1 1 1 p A a p a p a p a n n n n ; ) ( ... 0 1 1 1 p B b p b p b p b m m m m ; ) ( ... 0 1 1 1 p C c p c p c p c k k k k . Тоді рівняння (1.2) матиме вигляд: ( ) ( ) ( ) . A p z B p x C p y (1.3) Розв’язання операторного рівняння автоматичної системи Процес регулювання визначається загальним розв’язанням рівняння (1.2) при заданих зовнішніх збуреннях на систему. Як відомо, загальний розв’язок неоднорідного лінійного диференціа- льного рівняння має вигляд 0 ( ) ( ) ( ) ( ), x y z t z t z t z t (1.4)
- 4. 50 де 0 ( ) z t – загальний розв’язок однорідного диференціального рівняння; ( ) x z t , ( ) y z t – часткові розв’язки неоднорідного диференціального рівнян- ня. Розв’язок рівняння (1.4) звичайно визначається методом суперпози- ції (накладання) часткових розв’язків. Так, процес регулювання, спричине- ний сумою зовнішніх впливів, дорівнює алгебраїчній сумі процесів регу- лювання, спричинених кожним із зовнішніх впливів окремо. Розглянемо часткові випадки. Сигнали керування ) (t x зовнішнього збурення ) (t y відсутні Вважаючи у рівнянні (1.2) ( ) 0, ( ) 0, x t y t одержуємо однорідне диференціальне рівняння автоматичної системи ( ) 0. A p z Розв’язок цього рівняння у загальному випадку може бути поданий у вигляді 1 2 0 1 2 ( ) ... . n t t t n z t C e C e C e (1.5) Тут λ1…λn – корені характеристичного багаточлена А(р); C1…Cn – сталі ін- тегрування; n – порядок диференціального рівняння. Корені характеристичного багаточлена визначають розв’язанням ха- рактеристичного рівняння ( ) 0 A p , тобто 1 1 1 0 ( ) ... 0. n n n n A p a p a p a p a
- 5. 51 Значення цих коренів визначаються лише конструктивними параме- трами автоматичного пристрою. Отже, розв’язання однорідного диференціального рівняння (1.5) опи- сує власний рух або перехідний процес в автоматичній системі, вільній від зовнішніх впливів на неї (рис. 1.8, а). Рисунок 1.8. Перехідні процеси в автоматичній системі: а – за відсутності сигналу управління; б – за наявності сигналу управління Сталі інтегрування рівняння (1.4) обчислюються на підставі початко- вих умов вільного руху (з урахуванням значень 2 ( ), ( ), ( ), z t pz t p z t що мали місце у момент припинення зовнішніх збурень і початку перехідного про- цесу). Автоматична система зазнає впливу одного сигналу управління x(t) При дії на систему тільки сигналу x(t) її рух описується рівнянням a) z x zпочат Перехідний період t zпочат=Zуст z0 x(t)=0 t0 t1 0 0 z x x(t) 0 zпочат zx z0+zx t t0 t1 б) zуст
- 6. 52 ( ) ( ) . A p z B p x (1.6) Розв’язок рівняння (1.5) визначається двома доданками: 0 ( ) ( ) ( ), x z t z t z t де 1 2 0 1 2 ( ) ... n t t t n z t C e C e C e – перехідний процес, який вільний від впливів x(t); ( ) ( ) ( ) x B p z t x A p – вимушений рух, спричинений впливом x(t). Усталений вимушений рух (рис.1.8, б) системи має місце після закін- чення перехідного процесу, тобто при ( 0) t p , і зумовлений устале- ним значенням сигналу управління. Тоді розв’язок рівняння (1.6) набуде вигляду 1 2 1 2 (0) ( ) ... . (0) n t t t n B z t C e C e C e x A (1.7) При цьому сталі інтегрування Сі визначаються за початковими умо- вами з урахуванням усталеного значення сигналу управління. Сумісна дія збурення y(t) і сигналу управління x(t) Рівняння руху автоматичної системи при дії на неї лише зовнішнього збурення y(t) має вигляд ( ) ( ) . A p z C p y (1.8) Розв’язок рівняння (1.8) аналогічно розглянутому вище і має вигляд:
- 7. 53 1 2 0 1 2 (0) ( ) ( ) ( ) ... , (0) n t t t y n C z t z t z t C e C e C e y A (1.9) де 0 ( ) z t – перехідний процес, викликаний зовнішнім збуренням y(t); ( ) y z t – вимушений рух, зумовлений збурювальним впливом y(t). На підставі рівнянь (1.3)–(1.9) запишемо загальний розв’язок неод- норідного диференціального (операторного) рівняння руху автоматичної системи, що перебуває під впливом як сигналу управління, так і зовніш- нього збурення: 1 2 1 2 (0) (0) ( ) ... . (0) (0) n t t t n B C z t C e C e C e x y A A (1.10) Рівняння (1.10) дозволяє побудувати графік зміни у часі регульованої (вихідної) величини при дії на систему сигналів х(t), y(t), і зробити висно- вок про якість автоматичної системи, відповідності її вимогам технічних умов. Якщо закон зміни у часі сигналу управління відомий, то можна зро- бити висновок про закон зміни і регульованої величини. За критерій оцінки експоненціальної характеристики зазвичай беруть сталу часу Т, яка визна- чає швидкодію автоматичної системи. На підставі одержаних даних робляться висновки про відповідність системи поставленим вимогам.
- 8. 54 Загальні підходи до складання диференціальних рівнянь елементів САР Складання диференційних рівнянь являється творчою задачею, яку приходиться роз’язувати досліднику кожний раз заново, так як необхідно враховувати нові факти, специфіку часткового випадку та т.п. Методика знаходження (виводу) диференційних рівнянь являється загальною для всіх елементів САР і не залежить від їх принципу дії та їх конкретної фізичної реалізації. Методику виводу диференційних рівнянь елементів, які допускають лінеаризацію (заміну нелінійної характеристики лінійною), можна розділити на декілька кроків. Перший крок. Виявити фізичний закон, якому підкоряються виника- ючі в елементі процеси, та описати його математичним виразом. Зазвичай до таких законів відносяться основні закони електротехніки, механіки, гід- равліки і фізики. Математичний вираз фізичного закону являється почат- ковим диференційним рівнянням елементу. Другий крок. Використовуючи математичні та графічні залежності, всі змінні в початковому рівнянні виражаються через вхідну та вихідну ве- личини елементу. Вихідну величину і її похідну переносимо в ліву частину рівняння, вхідну величину і її похідні,- в праву частину. Третій крок. Якщо процеси, що протикають в системі описуються нелінійними диференційними рівняннями, то для розв’язання більшості практичних задач танкової автоматики нелінійні рівняння замінюються лі- нійними, тобто проводимо лінеаризацію всіх нелінійних рівнянь. При складанні рівнянь з метою їх спрощення іноді можна не враховувати па- діння напруги на перехідних контактах, пружність, люфти, якщо ці факто- ри не дають суттєвого впливу на процеси регулювання. В ряді випадків при аналізі стійких систем можна знехтувати малими доданками зі стар-
- 9. 55 шими похідними, але абсолютно не допустимо нехтувати проміжними до- данками, якщо вони мають дуже малі значення. Отримання та розв’язання диференціального рівняння руху башти Вважатимемо, що рух автоматичної системи стабілізації башти, яка перебуває під впливом сигналу управління та збурювальних дій, описуєть- ся рівнянням зб ст дб fб jб М М М M M (1.11) де dt d J M б зб jб – диференційне рівняння динамічного моменту інерції башти, що обертається за швидкістю б відносно нерухомої вісі Z; б fб f M – рівняння моменту тертя башти; зб ст дб М М M – динамічний момент башти дорівнює різниці мо- ментів стабілізатора ст М та збурення зб М . Замінюючи в рівнянні (1.11) моменти їх виразами, одержимо дифе- ренційне рівняння першого порядку дб б б zб М f dt d J Визначимо залежності ) (t б при заданому динамічному моменті дб М . Подамо попереднє рівняння руху в операторному вигляді: дб б б zб М f p J
- 10. 56 Скорочуючи форму запису рівняння руху, маємо дб б zб М f p J ) ( . Увівши позначення в останньому рівнянні f p J p A zб ) ( та 1 ) ( p B при дб М , одержимо наступне рівняння автоматичної системи стабілізації ба- шти: дб б М p B p А ) ( ) ( Для заданого динамічного моменту дб М визначаємо залежність ку- тової швидкості б , яка зводиться до знаходження її виразу із загального розв’язку однорідного диференціального рівняння без правої частини так і часткового розв’язку неоднорідного диференціального рівняння (з правою частиною), тобто загальний розв’язок цього диференціального рівняння має вигляд: ) ( ) ( ) ( t t t вимуш oб б , тобто, як суму вільного руху ) (t oб системи стабілізації (впливи відсутні) та її примусового руху ) (t вимуш під дією вхідного впливу різниці моментів стабілізації ст М башти і моменту зб М збурювальної дії. Розв’язок цього рівняння подамо у розгорнутому вигляді: ) 0 ( ) 0 ( ) ( A B M Сe t дб t б , де - корінь характеристичного рівняння, який визначається із його виразу 0 ) ( p А
- 11. 57 0 ) 0 ( f J А zб , zб J f . Відомо, що у початковий момент часу t = 0 система перебувала у спокої, тобто 0 | 0 t б . Після підстановки початкових умов роботи системи 0 | 0 t б , та заміни характеристичних багаточленів їх виразами у загальне рівняння 1 ) 0 ( В , f J А zб ) 0 ( воно запишеться у такому вигляді f J М C zб дб 0 . Після заміни значень кореня zб J f / характеристичного рівняння та сталу інтегрування f J М C zб дб у загальний розв’язок, рівняння руху ба- шти приводиться до вигляду: t J f zб дб zб дб t J f zб дб б б б e f J t М f J t М e f J t М t 1 ) ( ) ( ) ( ) ( . Перехідна характеристика зміни швидкості башти у часі подана на рис.1.9.
- 12. 58 f J K zб Рисунок 1.9. Експоненціальна зміна швидкості башти в часі 1.2.2. Структурне зображення диференціальних рівнянь Значно простішим і зручнішим у практиці методом розрахунку авто- матичних систем є метод структурного зображення диференціальних рів- нянь. Розв’язок диференціального рівняння (1.2) руху може бути записане як ( ) ( ) ( ) ( ) ( ). ( ) ( ) B p C p z t x t y t A p A p (1.12) Тоді при дії на систему лише сигналу управління x(t) розв’язок рів- няння (1.3) матиме вигляд ) ( / ) ( ) ( ) ( p A t x p B t z , а при дії на систему тільки зовнішнього збурення відповідно ) ( / ) ( ) ( ) ( p A p C t y t z . Визначимо відношення регульованої (вихідної) величини до сигналу управління, записане в операторній формі, як динамічним передавальним t Ωб К t x ) ( τ 2τ 3τ
- 13. 59 коефіцієнтом системи за сигналом управління, або передавальною функці- єю за сигналом управління. ( ) ( )/ ( ) ( )/ ( ). x W p z t x t B p A p Аналогічно відношення регульованої величини до зовнішнього збу- рення, записане в операторній формі, визначимо як динамічним передава- льним коефіцієнтом системи за зовнішнім збуренням або передавальною функцією за зовнішнім збуренням. ( ) ( )/ ( ) ( )/ ( ). y W p z t y t C p A p Таким чином, розв’язок (1.12) диференціального рівняння руху ав- томатичної системи можна записати як ( ) ( ) ( ) ( ) ( ). x y z t W p x t W p y t (1.13) Значення передавальних функцій дозволяє подати диференціальне рівняння (1.3) руху автоматичної системи у вигляді структурної схеми (рис. 1.10) (стрілками показано напрямок проходження сигналів). Розв’язок диференціального рівняння, поданого структурною схе- мою, обчислюється множенням вхідних сигналів на відповідні передавальні фу- нкції (за напрямком стрілок): 1 2 ( ) ( ) ( ) ( ) ( ) ( ) ( ). x y z t z t z t W p x t W p y t (1.14)
- 14. 60 Як бачимо, розв’язки (1.13), (1.14) диференціального рівняння, запи- саного в операторній формі або поданого у вигляді структурної схеми, то- тожні. Рисунок 1.10. Структурна схема диференціального рівняння руху автоматичної системи Таким чином, диференціальне рівняння руху будь-якого з елементів, що входять до складу автоматичної системи, може бути зображене відпо- відною структурною схемою. Композиція структурних елементів, що вхо- дять до складу автоматичної системи (структурної схеми системи), буде еквівалентною диференціальному рівнянню руху самої системи. Слід відзначити, що структурний метод подання диференціальних рівнянь є найзручнішим саме при розрахунку складних автоматичних сис- тем. Він виключає спільне розв’язання диференціальних рівнянь елемен- тів, що входять у систему, і дозволяє безпосередньо за структурною схе- мою описати процес регулювання. Y(t) X(t) Z(t) Z1(t) Z2(t) Wx(p) Wy(p)