
Recommended
More Related Content
What's hot
What's hot (20)
Similar to 10__Klasifikatsiia__datchikiv.pdf
Similar to 10__Klasifikatsiia__datchikiv.pdf (20)
More from ssuser5136e4
More from ssuser5136e4 (20)
Recently uploaded
Recently uploaded (15)
10__Klasifikatsiia__datchikiv.pdf
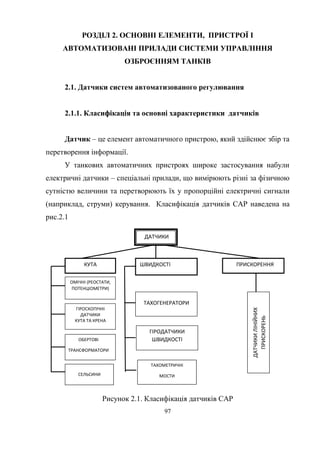
- 1. 97 РОЗДІЛ 2. ОСНОВНІ ЕЛЕМЕНТИ, ПРИСТРОЇ І АВТОМАТИЗОВАНІ ПРИЛАДИ СИСТЕМИ УПРАВЛІННЯ ОЗБРОЄННЯМ ТАНКІВ 2.1. Датчики систем автоматизованого регулювання 2.1.1. Класифікація та основні характеристики датчиків Датчик – це елемент автоматичного пристрою, який здійснює збір та перетворення інформації. У танкових автоматичних пристроях широке застосування набули електричні датчики – спеціальні прилади, що вимірюють різні за фізичною сутністю величини та перетворюють їх у пропорційні електричні сигнали (наприклад, струми) керування. Класифікація датчиків САР наведена на рис.2.1 Рисунок 2.1. Класифікація датчиків САР ДАТЧИКИ ШВИДКОСТІ ПРИСКОРЕННЯ ОМІЧНІ (РЕОСТАТИ, ПОТЕНЦІОМЕТРИ) ТАХОГЕНЕРАТОРИ ГІРОДАТЧИКИ ШВИДКОСТІ ТАХОМЕТРИЧНІ МОСТИ ДАТЧИКИ ЛІНІЙНИХ ПРИСКОРЕНЬ КУТА ГІРОСКОПІЧНІ ДАТЧИКИ КУТА ТА КРЕНА ОБЕРТОВІ ТРАНСФОРМАТОРИ СЕЛЬСИНИ
- 2. 98 Властивості будь-якого датчика можуть бути визначені рядом загальних характеристик, основними з яких можна вважати: Статичні характеристики, які визначають залежність вихідної величини Zвих (Uвих, Iвих) від усталеного значення неелектричної величини Zвх , що вимірюється. Приклад статичної характеристики потенціометричного датчика наведений на рисунку 2.2. Рисунок 2.2. Статична характеристика потенціометричного датчика Із статичної характеристики визначають: Передавальний коефіцієнт датчика ‒ характеризує крутизну статичної характеристики: або Зона лінійності датчика – ділянка статичної характеристики АВ (рис.2.2), на якій вихідна величина прямопропорційна вимірюваній величині. На цій ділянці . tg Z U К вх вих Д вх вих Д Z Z К const КД Zвих0 Zвх A B Δ Zвх Zвих Zвх0 Δ Zвих α (Uвих)
- 3. 99 Поріг чутливості датчика Zвх0 – мінімальне значення вимірюваної величини Zвх, при якому з’являється напруга (або струм) на виході датчика. Нульовий фон датчика Zвих0 – величина сигналу на виході датчика, при відсутності вхідного сигналу (Zвх0). Вхідна потужність Pвх – потужність, яка необхідна для переміщення вимірюваного органу датчика. Вихідна потужність Pвих – потужність електричного сигналу на виході датчика. Зазначимо, що Pвих=UвихIвих, ВА 2.1.2. Омічні датчики До омічних датчиків відносяться реостати, потенціометри та вугільні датчики. Потенціометричні датчики застосовуються як на постійному, так і на змінному струмах. Вони призначені для перетворення лінійних чи кутових переміщень у зміну електричного опору і відповідно йому в пропорційні електричні сигнали (струм чи напругу), які знімаються на його виході. Розрізняють нереверсивні потенціометричні датчики, які здійснюють зміну тільки значення напруги та реверсивні, які здійснюють зміну значення і полярності вихідної напруги. Потенціометричні датчики володіють такими перевагами, як простотою конструкції, можливістю живлення як постійним так і змінним струмом та можливістю отримання залежності вихідної напруги певного вигляду. До недоліків можна віднести значні зусилля для переміщення двигунця та значну потужність живлення.
- 4. 100 2.1.3. Простіший потенціометричний датчик Основною частиною потенціометричного датчика є повзунковий реостат, у якого опір змінюється завдяки переміщення контактного повзунка Д безпосередньо по витках дроту чи шини із матеріалу з високим питомим опором (константан, манганін, ніхром). Витки (шинка) розміщується на основі із електроізоляційного матеріалу (фарфор, стеатит, гетинакс). Електрична схема та статична характеристика потенціометричного датчика приведені на рисунку 2.3. a) б) Рисунок 2.3. Електрична схема (а) та статична характеристика (б) нереверсивного потенціометричного датчика Реостат з опором RП підключено до джерела струму з напругою U0, а навантаження RН підключена до повзунка Д потенціометра та одного з виходів джерела, наприклад, точка С. При переміщенні повзунка на величину lx вихідна напруга змінюється від 0 до Uвих без зміни полярності. В колі АДСВ за законом Ома проходить однаковий струм на всіх його ділянках і виконується співвідношення П П R U I 0 . lX U0 lП A B + _ RП Uвих lХ RН Д С ІП І R3<R2 RH=∞ R2<RH Uвих R4<R3 R2 R3 R4
- 5. 101 В цьому випадку . Із рівності струмів П lx I I вихідна напруга може бути обчислена із рівності відношень: , . Відомо, що опір провідника із струмом визначається за формулою , де – питомий опір матеріалу провідника, ; – довжина провідника, м; – площа перерізу провідника, мм2 ; Для провідникового дроту незмінного перерізу і питомого опору випливає вираз: ВИХ U , де - коефіцієнт передачі потенциометра, ; Лінійна залежність Uвих від lx підтримується при Н R . На практиці потенціометричний датчик можна вважати лінійним вже при 1 , 0 / Н П R R . Передавальна функція датчика матиме вигляд: П l U0 . lx вих lx R U I П lx вих R R U U 0 0 U R R U П lx вих S l R м мм Ом 2 l S X П X l K l l U 0 П l U K 0 мм В K l p U p W x ВИХ ) ( ) (
- 6. 102 Потенціометричний датчик при 1 , 0 / Н П R R можна вважати лінійною (безінерційною) ланкою САР. Потенціометричні датчики найшли широке застосування у електричних як технологічних так і експлуатаційних регулювань (блок управління БУ-К1, електроблок виробу 1Г42, ТБО, блок управління стабілізатора 2Е36 та ін.). Потенціометр із середньою точкою або з подільником напруги У випадку, коли необхідно в залежності від напрямку переміщення повзунка виміряти не тільки величину вихідного сигналу , а і його полярність (фазу), застосовується потенціометр із середньою точкою або потенціометр з подільником напруги. На рис. 2.4, а наведена електрична схема потенціометра з середньою точкою. Навантаження RН, вмикається у ланцюг між повзунком Д та середньою точкою СПН подільника . У вихідному положенні потенціали середніх точок подільника CПН і двигунця СД рівні тому напруга на навантаженні RН дорівнює нулю. . При переміщенні двигунця угору його потенціал становиться вищим за потенціал середньої точки подільника СП, на навантаженні з’являється напруга позитивної полярності. , максимальне значення якої . Аналогічно, якщо двигунець пересувається униз, змінює полярність на від’ємну. На рис. 2.4, б наведена електрична схема, коли вхідною величиною може бути кутове переміщення двигунця. Тут подільник напруги складається. з двох однакових плечей з опорами RПН1= RПН2, які вмикається до зовнішнього джерела напруги . ВИХ U Д ПН С С 0 ВИХ С С U Д ПН П ВИХ l x U U 2 0 2 0 max U UВИХ ВИХ U 0 U
- 7. 103 Рисунок 2.4. Електрична схема потенціометричного датчика з середньою точкою (а), подільником напруги (б) При переміщенні повзунка на кут + α (ліворуч від середньої точки СД), струм проходить по колу: точка А (+), RП1, RH, точка СПН, RПН2, точка В (-). При переміщенні двигунця на кут – α (праворуч від середньої точки СД), струм проходить по колу: точка А (+), RПН1, точка СПН, RH, RП2, точка В (-). Як видно із рис.2.4, б напрям струму змінився на протилежний. Потенціометри із середньою точкою або подільником напруги використовуються у пультах управління системи управління вогнем з метою наведення зброї та слідкування за ціллю. 2.1.4. Синусно - косинусний потенціометр У випадку, коли потрібно отримати зміну вихідної величини за законом тригонометричної функції, застосовуються синусно-косінусні потенціометри. На рисунку 2.5 зображена найпростіша схема косінусного потенціометра. Він являє собою плоску пластину з ізоляційного матеріалу, на яку рівномірно намотана обмотка. Вісь повзунка закріплена у центрі RН + A B _ lП Uвих x Д CПН CД СД Подільник напруги RП2 B _ A + UВИХ RП1 Rн RПН2 СПН RПН1 Д α а) б)
- 8. 104 пластини. Повзунок пересувається по колу від приводного механізму. Вихідна напруга знімається з двигунця та середньої точки подільника напруги ПН. За вхідну величину вважається кут повороту повзунка , а за вихідну – напругу . Тоді отримуємо Рисунок 2.5. Схема (а) та статична характеристика (б) косинусного потенціометра 2.1.5. Гіроскопічні датчики автоматичних систем управління озброєнням. Основні властивості гіроскопів Гіроскопом називається матеріальне тіло, яке швидко обертається і вісь обертання якого може змінювати свій напрямок у просторі. Прикладом гіроскопа може служити дитяча іграшка „дзиґа”. Вільний гіроскоп має (рис. 2.6) шість степенів вільності: він може переміщуватись вздовж координатних осей x, y, z і повертатись відносно них відповідно на кути α, β, ψ. ВИХ U cos 2 0 U UВИХ 0 U , ° 0 9 Uвих, В а) б)
- 9. 105 Обертання ротора навколо осі симетрії zz визначає головний момент кількості руху – кінетичний момент p p J H де 2 5 , 0 mR J p — момент інерції ротора, г см с; 30 n p — кутова швидкість ротора; ) 1 ( 60 s p f n — оберти трифазного двигуна гіроскопа, хв об ; f=400 – частота перемінної напруги живлення, Гц; p=1 – число пар полюсів статора АД гіроскопа; s=0.05-0.1 – ковзання ротора двигуна відносно магнітного поля статора гіроскопа. Напрямок вектору моменту Н визначається за відомим правилом гвинта (правило буравчика). В інженерній практиці виникає необхідність мати гіроскоп з двома і трьома степенями вільності. Проте труднощі використання вільних гіроскопів у технічних системах вільних гіроскопів очевидні. Задача розв’язується установкою гіроскопів у карданові підвіси. Кінематичні β x y Y X α Ωр Ψ H z Z Рисунок 2.6. Вільний гіроскоп: Н – кінетичний момент гіроскопа; Jp – момент інерції ротора; Ωp – кутова частота обертання ротора; Z – вісь симетрії (головна вісь гіроскопа)
- 10. 106 схеми таких гіроскопів з двома та трьома степенями вільності наведені на рис. 2.7. Рисунок 2.7. Кінематичні схеми гіроскопів у карданових підвісах: а – двоступеневий; б – триступеневий Триступеневий гіроскоп складається зі швидкообертового ротора Р, що обладнується у підшипниках внутрішньої рамки ВР, яка може повертатись разом з ротором відносно зовнішньої рамки ЗР; остання встановлена у підшипниках основи О. Ротором гіроскопа є ротор асинхронного трифазного електродвигуна оберненої конструкції (рис.2.8), у якій ротор знаходиться зовні статора. Обертання ротора з кутовою частотою навколо осі z є першим степенем вільності гіроскопа, поворот ротора разом з внутрішньою рамкою навколо осі у – другий степінь вільності, а поворот ротора та внутрішньої рамки разом з зовнішньою рамкою навколо осі х забезпечує гіроскопу третій степінь вільності. Три степені вільності гіроскопу по p Hp 0 x Bp P y α β Ωр z Bp P x y 0 ωx β Ωр z а) б)
- 11. 107 трьом вісям обертання забезпечує механізм, який називається карданним підвісом. Рисунок 2.8. Гіромотор ГМА-411і його електрична схема: 1−стержень обмотки ротора; 2− статор; 3− вісь гіромотора; 4− пакет електротехнічної сталі статора; 5− маховик ротора; 6− електропровідники живлення обмотки статора; 7− трифазна обмотка статора. Двоступеневий гіроскоп відрізняється від триступеневого відсутністю зовнішньої рамки: його внутрішня рамка встановлена у підшипниках основи. Якщо центр мас ротора гіроскопа та рамок карданова підвісу збігаються з початком координатних осей х, у, z, то гіроскоп вважається зрівноваженим або астатичним. З механіки відомо, що гіроскопи мають дві визначальні властивості: стійкість та прецесію. Стійкістю гіроскопа називається його здатність зберігати незмінним у просторі кутове положення головної осі при коливаннях його основи. Прецесія – це відхилення вісі обертання z-z рухомого ротора гіроскопа відносно не рухомої системи координат під дією моментів, прикладених до рамок карданного підвісу. Особливість прецесійного руху
- 12. 108 полягає в тому, що напрямок прецесії не збігається з напрямком дії збурювального моменту. Найповніше і найбільш яскраво зазначені властивості виявляються у триступеневому гіроскопі. 2.1.6. Триступеневій гіроскоп Рівняння руху Кінематична схема триступеневого гіроскопа наведена на рис. 2.9. Розглянемо процеси, що відбуваються у гіроскопі при дії на його рамки збурювальних моментів. Для спрощення аналізу при збереженні його загальних властивостей приймемо наступні допущення: – вектори збурювальних моментів Мх та Му, що діють на рамки гіроскопа, збігаються за напрямком з додатним напрямком відповідних осей гіроскопа; – тертя в опорах рамок „в’язке”, тобто моменти тертя пропорційні відносним кутовим швидкостям рамок Мтр = fω; – у початковому положенні рамки гіроскопа є взаємно перпендикулярними, а рівняння руху розглядаються для малих абсолютних кутів α та β повороту рамок. При дії на зовнішню рамку гіроскопа зовнішнього моменту Мх рамка намагається повернутись навколо своєї осі зі швидкістю ωх. Очевидно, ротор, який обертається з частотою p навколо осі z , бере участь у двох рухах – відносному навколо осі z-z та переносному разом з внутрішньою та зовнішньою рамками навколо осі x-x. З теоретичної механіки відомо, що на тіло, яке бере участь у відносному та переносному рухах, діє поворотне (коріолісове) прискорення.
- 13. 109 Рисунок 2.9. Кінематична схема триступеневого гіроскопа Поворотне прискорення ротора викликає появу сил інерції, рівнодійна яких створює момент (x) гy M , напрямок якого може бути визначений за таким правилом: повернути вектор Мх на кут π/2 у напрямку обертання ротора. Момент H M (x) гy називається гіроскопічним моментом. Згідно схеми гіроскопа (рис. 2.9), він направлений вздовж осі у та прикладений до внутрішньої рамки гіроскопа. Індекс (х) позначає, що причиною появи моменту (x) гy M був вимушений рух відносно осі х. Гіроскопічний момент (x) гy M разом з зовнішнім моментом Му сприяє повороту внутрішньої рамки навколо осі у зі швидкістю ωу. Участь ротора гіроскопа у двох рухах – відносному та переносному відносно осі y-y разом з внутрішньою та зовнішньою рамками – веде до появи гіроскопічного моменту (y) гx M , направленого по осі х та прикладеного до зовнішньої рамки гіроскопа. При цьому дія моменту (y) гx M є протилежною дії моменту y M , тобто вони намагаються повернути зовнішню рамку у різні напрямки. Mx Mтрx Mjx Mjy Mгрy My ω y ωx H x x Bp P y Ωр z y z ЗР
- 14. 110 Описані процеси, що відбуваються у триступеневому гіроскопі, можуть бути зображені логічною схемою вигляду Рисунок 2.10. Логічна схема процесів у гіроскопі Заміняючи логічні переходи (→) відповідними диференціальними рівняннями зв’язку, одержимо рівняння руху триступеневого астатичного гіроскопа. При складанні рівнянь скористаємось методом кінетостатики, згідно з яким рівняння руху будь-якої системи можна скласти як рівняння рівноваги, додаючи до діючих на систему сил (моментів) сили (моменти) інерції. Рівняння руху зовнішньої рамки Зовнішньому моменту x M , що діє на зовнішню рамку (рис.2.8), протидіють: - інерційний момент ротора та рамок підвісу де x J – момент інерції ротора та рамок відносно осі х; - момент від сил тертя у підшипниках основи (опорі зовнішньої рамки) де x f – коефіцієнт в’язкого тертя в опорах зовнішньої рамки; ω / , jx x x M J d dt тр ω , x x x M f Р
- 15. 111 - гіроскопічний момент, зумовлений відносним р та переносним y рухом ротора: Отже, рівняння моментів, що діють на зовнішню рамку, може бути подане як (2.1) або в операторному вигляді: (2.2) де x x x f J T / – стала часу зовнішньої рамки гіроскопа; x x x f J k / – статичний передавальний коефіцієнт зовнішньої рамки. На основі рівняння (2.2) визначимо передавальну функцію ЗР: та побудуємо (рис. 2.11) структурне зображення (структурну схему) її диференціального рівняння (2.2). На основі останнього робимо висновок, що за своїми статичними та динамічними властивостями ЗР еквівалентна інерційній ланці першого порядку. ( ) г p p ω ω . y x y x M H J ω / ω ω x x x x y x J d dt f H M ( 1)ω ( ω ), x x x x y T p k M H ЗР ω ( ) ω 1 x x x y x k W p M H T p
- 16. 112 Рисунок 2.11. Структурна схема зовнішньої рамки триступеневого гіроскопа Рівняння руху внутрішньої рамки Внутрішня рамка зазнає дії таких моментів: - збурювального моменту y M ; - інерційного моменту ротора та внутрішньої рамки dt d J M y jy / де y J – момент інерції ротора та внутрішньої рамки відносно осі у; - моменту від сил тертя в опорі внутрішньої рамки y y y f M тр , де y f – коефіцієнт в’язкого тертя в опорі внутрішньої рамки; - гіроскопічного моменту, що зумовлений відносним р та переносним x рухом ротора: ( ) г p p ω ω . x y y x M H J Mx H Mx H
- 17. 113 Рівняння моментів, що діють на внутрішню рамку, з урахуванням зроблених зауважень має вигляд Переходячи до операторної форми запису, одержуємо передавальну функцію: 1 ) ( p T k H М р W y y x y у ВР де y y f k / 1 , y y y f J T / ‒ відповідно статичний передавальний коефіцієнт та стала часу ЗР. З останнього виходить, що і внутрішня рамка гіроскопа за своїми динамічними властивостями еквівалентна інерційній ланці першого порядку та має наступну структурну схему (рис. 2.12): Рисунок 2.12. Структурна схема внутрішньої рамки триступеневого гіроскопа Рівняння руху гіроскопа Аналіз рівнянь руху зовнішньої та внутрішньої рамок, їх структурних зображень свідчить, що рухи рамок взаємопов’язані, тобто ω / ω ω . y y y y x y J d dt f H M My H
- 18. 114 поворот внутрішньої рамки ωу впливає на швидкість повороту ωх зовнішньої і навпаки. Отже, для визначення законів руху гіроскопа необхідно розглядати систему рівнянь: (2.3) Об’єднуючи структурні схеми (рис. 2.11, 2.12) рамок гіроскопа, одержуємо структурне зображення системи диференціальних рівнянь (2.3) – структурну схему триступеневого гіроскопа, яка наведена наведену на рис. 2.13. Рисунок 2.13. Структурна схема триступеневого гіроскопа Знання структурної схеми дозволяє провести аналіз динаміки та статики триступеневого гіроскопа без розв’язання диференціальних рівнянь руху його рамок. My H Mx H ω ω ω ; ω ω ω . x x x x y x y y y y x y d J f H M dt d J f H M dt
- 19. 115 2.1.5. Структурний аналіз триступеневого гіроскопа Структурний аналіз будь-якої технічної системи передбачає визначення її передавальних функцій за вхідними діями, складання рівнянь зв’язку регульованої (вхідної) величини з діями на вході, дослідження статики та динаміки. Розвиваючи етапи структурного аналізу на триступеневий гіроскоп, визначимо його передавальні функції за збуреннями Мх, Му. Як вихідний сигнал розглядатимемо швидкість повороту зовнішньої рамки ωх. Відповідно до структурної схеми (рис. 2.13) маємо: ) ( 1 . 1 1 1 ) ( H p T k H p T k p T k М р W x x x y x x x х x (2.4) 2 2 2 1 ) ( ) 1 ( H f H k k p T T p T T p T k y y x y x y x y x Н H p T k H p T k p T k Н p T k М р W x x x y x x у y y х y 1 ) ( 1 . 1 1 1 ) ( 1 ) ( (2.5) Згідно з передавальними функціями (2.4), (2.5) одержуємо рівняння зв’язку вихідної величини зі збурювальними моментами: (2.6) Інтегруючи рівняння (2.6), визначаємо складові кута α повороту зовнішньої рамки гіроскопа: 2 1 ω / ; x y x f M H H M y x / 2
- 20. 116 Тоді при отримаємо перехідні характеристики, наведені на рис. 2.14. Рисунок 2.14. Перехідні характеристики триступеневого гіроскопа Таким чином, при дії на зовнішню рамку тристепеневого гіроскопа моменту Мх швидкість її вимушеного руху ωх1 надзвичайно мала, а кут α1 повороту рамки може вважатись нульовим – властивість стійкості. Разом з тим момент Мх, прикладений до внутрішньої рамки, викликає рух рамки зовнішньої зі швидкістю ωх2, що у багато разів перевищує швидкість вимушеного руху. При цьому напрямок руху зовнішньої рамки (навколо осі х) не збігається з напрямком дії моменту Мх (навколо осі у) – властивість прецесії. Аналогічним чином за структурною схемою можуть бути одержані передавальні функції за вихідним сигналом ωу при дії на гіроскоп моментів Мх, Мн. Тоді – прецесійний рух; – вимушений рух. 2 1 α / ; y x f M t H H t M y / 2 ( ) ( ) 1( ) x y M t M t t H Mx y / 1 2 2 ω / y x y f M H M α1 α2 Mx= My=1(t) t
- 21. 117 Саме тут прослідковуються властивості стійкості та прецесії. В усіх випадках прецесійний рух інтенсивніший за вимушений. Властивості стійкості та прецесії, які має триступеневий гіроскоп, дозволяють використовувати його як вимірювальний пристрій кутових відхилень гармати (башти) від заданого наводкою напряму. Структурна схема та передавальні функції дозволяють зробити висновки про те, що триступеневий гіроскоп являє собою автоматичну систему з регулюванням за відхиленням вихідної величини. Наявність у гіроскопа замкненого контуру регулювання зумовлене внутрішніми жорсткими від’ємними зворотними зв’язками. Триступеневий гіроскоп є інерційною ланкою другого порядку. Проте внаслідок мализни сталих часу, Tx, Ty зовнішньої та внутрішньої рамок з достатньою для інженерних розрахунків точністю його можна вважати безінерційною ланкою. 2.1.6. Гіроскопічний датчик кута та його системи Якщо триступеневий гіроскоп установити на гарматі та зорієнтувати, як показано на рис. 2.15, тобто вісь у внутрішньої рамки направити паралельно осі уГ каналу ствола, а вісь х зовнішньої рамки – паралельно осі хГ цапф, то його можна вважати задавачем кутового положення озброєння у вертикальній площині (ВН). Справді, напрямок вісі внутрішньої рамки – це напрямок лінії пострілу. При коливаннях гармати у вертикальній площині зі швидкостями ω0 на зовнішню рамку гіроскопа діятиме збурювальний момент Г x x f M , який визначається тертям у її опорах. Однак внаслідок властивості стійкості зовнішня рамка залишається практично нерухомою, а це значить, що вісь у збереже заданий їй напрямок – напрямок лінії пострілу. Відхилення ж гармати від заданого напрямку можуть визначатись за кутом її непогодження з нерухомою зовнішньою рамкою гіроскопа.
- 22. 118 Рисунок 2.15. Гіроскопічний датчик кута стабілізатора гармати РК – реле корекції; ЕМК – електромагніт корекції; ПК – потенціометр керування; ЕМН – електромагніт наведення; ОТ – обертовий трансформатор. Для вимірювання кутових відхилень башти у горизонтальній площині від заданого напрямку необхідно встановити гіроскоп так, щоб його вимірювальна вісь – вісь зовнішньої рамки – була паралельною осі обертання башти. З метою перетворень кутових відхилень гармати (башти) від заданого наводкою напрямку у пропорційні електричні сигнали з зовнішньою рамкою гіроскопа з’єднують ротор Р обертового трансформатора, а його статор С– з основою (гарматою), на якій обладнано гіроскоп. Конструктивна схема гіродатчика кута стабілізатора башти стабілізатора 2Е-28М танка Т-72 подана на рис.2.16. Основні елементи: тристепеневий гіроскоп 5,6,7, обертовий трансформатор 3, електромагніт системи наведення, система корекції 12,13, та аретир 1. [2].
- 23. 119 Рисунок 2.16. Гіродатчик кута стабілізатора башти 1- електромагніт аретиру; 2- обертовий трансформатор; 3- важіль аретиру; 4- реле корекції; 5- внутрішня рамка гіроскопа; 6- ротор гіроскопу; 7- статор електромагніта корекції; 8- ротор електромагніта корекції; 9- зовнішня рамка гіроскопа з електромагнітом наведення; 10- ножова букса; 11- ротор електромагніта наведення; 12- двигун системи корекції; 13- контакти системи корекції; 14- основа; 15- устаночна шпилька. Обертовий трансформатор Обертові трансформатори (ОТ) являють собою малогабаритні електричні машини змінного струму. Значне поширення отримали безконтактні ОТ (магнесини). Основи їх улаштування та принципи дії проілюстровані рис. 2.17. На двох полюсах статора чотириполюсного ОТ (рис. 2.17, а) розміщена обмотка збудження ОЗ, яка охоплює зразу обидва полюси. На 4 5 15 14 13 12 11 10 9 8
- 24. 120 кожному з двох інших полюсів є сигнальні обмотки О1 і О2, з числом витків які намотані зустрічно одна одній. Ротор Р не має обмоток і виконує функції магнітного комутатора. При нейтральному положенні ротора магнітний потік обмотки збудження ОЗ розподіляється рівномірно та індукує в обмотках О1 та О2 ЕРС, однакові за значенням, але протилежні за фазою (рис. 2.17, в). При цьому ЕРС на виході ОТ дорівнює нулю (е = 0). При повороті ротора на кут α, наприклад, по ходу годинникової стрілки магнітний потік, зв’язаний з обмоткою О1, збільшується, а магнітний потік, зв’язаний з обмоткою О2, зменшується. Як наслідок, (рис. 2.17, г) і на виході ОТ з’явиться різницева ЕРС. При повороті ротора на кут α проти ходу годинникової стрілки зміниться фаза вихідного сигналу (рис. 2.17, д). На рис. 2.17, б показано аналогічний за принципом дії фрагмент багатополюсний ОТ, який використовується в прицілах 1Г42 та 1Г46. Кожні три полюси статора та відповідний їм один полюс ротора утворюють самостійний елементарний ОТ. Число таких елементарних датчиків дорівнює числу полюсів ротора. Їх з’єднують послідовно. На полюсах статора 3 6, 9… статора розташовують обмотки збудження, а на інших полюсах – сигнальні котушки, це дозволяє одержати високий сумарний передавальний коефіцієнт. Діюче значення ЕРС на виході ОТ визначається згідно з рис. 2.17, е. Тут wОЗ – число витків обмотки збудження; wОС– кількість витків сигнальної обмотки; U0 – опорна напруга; kОТ – передавальний коефіцієнт. Статична характеристика ОТ наведена на рис. 2.17, ж. Діюче значення на виході багатополюсного ОТ визначається виразом e n e от . (n – кількість елементарних ОТ).
- 25. 121 OЗ 0 OT OC w e u K w Рисунок 2.17. Основи будови та принципи дії безконтактного ОТ: а, б – відповідно чотириполюсний та багатополюсний ОТ; в, г, д – часові діаграми ЕРС; е – рівняння руху та його структурне зображення; ж – статична характеристика. Система наведення За необхідності зміни того напрямку лінії пострілу, який задається, достатньо змінити просторове положення осі у внутрішньої рамки ~U0 OЗ P Ф1 C Ф2 O1 O1 O2 O2 ~U0 e OЗ P α а) б) e ж) г д) e α α в) e e e t t t e=0 = e1 e2 e1 e2 e2 e1 e e С е) KОТ е α г)
- 26. 122 гіроскопа, тобто повернути внутрішню рамку разом із зовнішньою навколо осі х. Для реалізації цієї мети використовується друга властивість гіроскопа – властивість прецесії. Момент управління створюється спеціальним електромагнітом наведення ЕМН (див. рис. 2.15, 2.16), ротор якого встановлюється на осі внутрішньої рамки, а статор – на зовнішній рамці. Керування електромагнітом здійснюється від потенціометра пульта управління (ПУ) прицілу. Значення моменту, що створюється ЕМН, пропорційне куту повороту пульта: Оскільки момент Мн прикладений до внутрішньої рамки, то вона залишиться нерухомою, а зовнішня почне прецесувати навколо своєї осі зі швидкістю, пропорційною куту повороту пульта H k H Mн x / / пк пк . Тут H ‒ кінематичний момент гіроскопа. Після повернення ПУ у початкове положення дія моменту наведення припиняється, рамка зупиняється – лінії пострілу задано нове просторове положення. Разом із зовнішньою рамкою повертається і ротор ОТ. Оскільки статор з’єднаний з основою гіроскопа (гарматою), то він деяку мить часу залишився нерухомим. Отже, на виході ОТ виникає електричний сигнал, пропорційний зміні положення ротору ОТ лінії пострілу. Якщо цей сигнал подати на виконавчі приводи управління гарматою (баштою), то вона прийде в узгоджене положення з тією лінією пострілу, що задається наводкою: статор ОТ разом з гарматою повернеться навколо осі х і займе таке положення відносно ротора, коли сигнал на виході ОТ стане дорівнювати нулю. н ПК ПК α . M k
- 27. 123 Система корекції При аналізі роботи триступеневого гіроскопа його рамки вважались ідеально зрівноваженими. Насправді на них завжди діють зовнішні та внутрішні моменти, спричинені коливаннями корпусу танка, неврівноваженістю рамок. Наявність зазначених моментів викликає уведення (відхилення) рамок гіроскопа від заданого напрямку. Так, внаслідок прецесії ВР порушується її взаємна перпендикулярність із ЗР, що приводить до зменшення гіроскопічних моментів і, отже, до зниження точності гіроскопа. Для забезпечення взаємної перпендикулярності рамок застосовуються спеціальні пристрої, так звані системи корекції. Система корекції являє собою контактно-релейну схему, яка забезпечує періодичне відновлення взаємної перпендикулярності рамок. Вона має у своєму складі контактний датчик КД, реле корекції РК та електромагніт корекції ЕМК (див. рис. 2.15, 2.16). Рухливий контакт КД розміщений на осі внутрішньої рамки гіроскопа, нерухомі кріпляться до зовнішньої рамки. Тому при „завалюванні” під дією зовнішнього моменту Мх внутрішньої рамки відносно зовнішньої на кут 3 ... 2 / К x H t M рухливий контакт КД замикає через нерухомі ланцюг реле корекції РК. Останнє активізує (вмикає) електромагніт ЕМК корекції, ротор Р якого розташований на осі зовнішньої рамки, а статор обладнаний на основі гіроскопа. Момент електромагніту викличе прецесію внутрішньої рамки на кут H t M M К x / ) ( до повного відновлення її перпендикулярності щодо зовнішньої рамки. Робочий процес системи корекції показано на рис. 2.18.
- 28. 124 Рисунок 2.18. Діаграма робочого процесу системи корекції Таким чином, система корекції утримує рамки у взаємно перпендикулярному положенні з точністю, що визначається шириною зони ±β нечутливості контактного датчика. Триступеневий гіроскоп, споряджений системою корекції, системою наведення та датчиком кутових переміщень (ОТ) являє собою гіроскопічний датчик кута (ГДК), що застосовується у стабілізаторах 2Е28, 2Е42-2 танків Т-72. ГДК стабілізаторів гармати (СГ) та башти СБ працюють однаково й відрізняються лише орієнтацією осей відносно гармати і башти. Структурні схеми ГДКСГ і ГДКСБ ідентичні (рис. 2.19) і можуть бути побудовані на основі структурної схеми триступеневого гіроскопа шляхом введення у неї передавальних функцій обертового трансформатора kОТ, систем наведення kПУ та корекції WСК(p). Cпрощуючи схему відповідно до рівнянь (2.4), (2.5), у першому наближенні одержуємо структурне зображення гіроскопічного датчика кута, яке подане на рис. 2.20. У гіроскопічних датчиках кутового положення гармати (башти), поряд з використанням триступеневих гіроскопів, може бути застосована і
- 29. 125 двохосьова гіроскопічна рама. Можливий варіант такої рами наведено на рис. 2.21. Рисунок 2.19. Структурна схема гіроскопічного датчика кута Рисунок 2.20. Приведена структурна схема гіроскопічного датчика кута My H Mx H MСК MТР p p H f 2 y ОТ K My Hp 1 ПУ Mx 0 Hp 1 КПУ ПУ
- 30. 126 2.1.7. Двохосьова гіроскопічна рама Рисунок 2.21. Кінематична схема двохосьової гіроскопічної рами: а – площина ВН; б – площина ГН y x z P П Н ГГ O ГВ Н Н y x z ωy1 Mx a б
- 31. 127 В стабілізаторах поля зору прицілів 1Г42, 1Г46 в якості гіроскопічних датчиків кутового положення гармати (башти) застосовується двохосьова гіроскопічна рама. Один з можливих варіантів такої рами наведено на рис. 2.21. Двохосьова гіроскопічна рама складається з платформи П, на якій обладнано два двоступеневих поплавкових гіроскопи ГВ та ГГ, рамки яких розвернуті одна щодо іншої на 90º. Гіроскопи, як правило, конструктивно є однаковими, тобто їх кінетичні моменти та моменти тертя в опорах рамок рівні між собою. Платформа П розміщена у рамі Р, змонтованій на основі О і може повертатися відносно вісі Z, яка паралельна вісі обертання башти, а разом з рамою – відносно вісі Х, яка паралельна вісі цапф гармати. Зазначена кінематика гірорами забезпечує кожному гіроскопу три степені вільності. За конструктивним виконанням двохосьова гіроскопічна рама еквівалентна двом триступеневим гіроскопам. Розглянемо процеси, що відбуваються у гірорамі при дії на неї зовнішніх збурень. Площина ВН Вважатиме, що на раму Р діє збурювальний момент x М , (рис. 2.21, а) який визначається поздовжніми кутовими коливаннями корпусу танка і викликає її повертання танка навколо осі х зі швидкістю x . Разом з рамою навколо осі х буде повертатися платформа П з гіроскопом ГВ. Швидкість ωх, не впливаючи на гіроскоп ГГ, викличе на рамці гіроскопа ГВ гіроскопічний момент 1 x y H M 1 ) ( г . Почнеться прецесійний рух рамки гіроскопа ГВ з деякою швидкістю 1 y . Моменту ) ( г x y1 M протидіють моменти тертя 1 y Mтр та інерції 1 y j M рамки та ротора гіроскопа ГВ:
- 32. 128 dt d J M 1 1 y jy / гв ; 1 1 y y fd M тр Участь ротора гіроскопа ГВ у двох рухах – відносному р та переносному 1 y – приводить до появи гіроскопічного моменту 1 y H M гв , який через опори рамки та платформи передається на раму Р, протидіючи збурювальному моменту Мх. Зовнішня рама залишиться практично нерухомою, а рамка гіроскопа ГВ буде прецесувати. Рівняння моментів, що діють на раму гірорами та рамку гіроскопа ГВ, можуть бути одержані на основі методу кінетостатики: де , – моменти інерції та тертя рами відповідно. Розкриємо значення моментів у системі (2.4), вважаючи, що: де – приведений момент інерції гірорами щодо осі х; – коефіцієнт в’язкого тертя в опорах рами. Подаючи кожне з рівнянь у вигляді структурної схеми, а потім об’єднуючи їх, одержимо структурну схему гірорами для вертикальної площини (рис. 2.22). Верхній ланцюжок структурної схеми відповідає рамі, нижній – гіроскопу з рамкою, вертикальні – гіроскопічним зв’язкам. Для отримання тр ГВ ; j x x x M M M M 1 1 1 1 ( ) тр г , x j y y y y M M M M 1 ω / ω ω ; x x x x x y J d dt f M H 1 1 ω ω , y y x f M H (2.4) j x M тр x M x J J ГВ x J x f
- 33. 129 значень кутів α та β повороту рами і рамки у схему включено дві інтегрувальні ланки. Рисунок 2.22. Структурна схема двохосьової гірорами для площини ВН При цьому прийнято такі позначення: – статичний передавальний коефіцієнт рами; – стала часу рами; – статичний передавальний коефіцієнт гіроскопа ГВ і рамки. Таким чином, для площини ВН двохосьова гіроскопічна рама за своїми властивостями є еквівалентною триступеневому гіроскопу і дозволяє виміряти за кутом непогодження з нерухомою (стійкою) рамою Р кутові відхилення своєї основи (гармати) у вертикальній площині. Площина ГН Нехай на платформу (див. рис. 2.21, б) діє збурювальний момент Мz, що визначається горизонтальними кутовими коливаннями корпусу танка і викликає її повертання відносно осі z зі швидкістю ωz. Mx H H p / x x T J f p 1/ k f ГВ 1/ x k f
- 34. 130 Швидкість ωz, не впливаючи на гіроскоп ГГ, викличе на рамці гіроскопа ГГ гіроскопічний момент , під дією якого почнеться прецесійний рух рамки гіроскопа ГГ з деякою швидкістю . Моменту протидіють моменти тертя та інерції рамки та ротора гіроскопа ГГ: Прецесійний рух рамки гіроскопа ГГ, у свою чергу, приводить до виникнення гіроскопічного моменту , який через опори передається на платформу, протидіючи збурювальному моменту Мz. При цьому платформа залишиться практично нерухомою, а рамка гіроскопа ГГ буде прецесувати. Рівняння моментів, що діють на платформу та рамку гіроскопа ГГ: (x) гy2 y ТРy jy z ГГ ТРz jz M M M M M M M M 2 2 2 (2.5) Після розкриття виразів моментів та враховуючи те, що Z ГГ J J система рівнянь (2.5) прийме вигляд z y y y z Z z Z Z H M f H M f dt d J 2 2 2 / (2.6) На основі (2.6) одержуємо структурну схему гірорами для горизонтальної площини, яка наведена на рис. 2.23. На схемі прийнято такі позначення: 2 ( ) г ω j y z M H 2 ωy 2 ( ) г x y M 2 тр y M 2 j y M 2 2 ГГ ω / ; j y y M J d dt 2 2 тр ω . y y M f 2 ГГ ωy M H
- 35. 131 Рисунок 2.23. Структурна схема двохосьової гірорами для площини ГН – статичний передавальний коефіцієнт платформи; – стала часу платформи; – статичний передавальний коефіцієнт гіроскопа ГГ та рамки. Таким чином, для площини ГН двохосьова гірорама за своїми властивостями є еквівалентною гіроскопу з трьома степенями вільності; вона дозволяє виміряти за кутом непогодження з нерухомою (стійкою) платформою П кутові відхилення своєї основи (башти) у горизонтальній площині. Об’єднуючи структурні схеми рис. 2.22, 2.23 в одну, отримаємо повну структурну схему двохосьової гіроскопічної рами (рис. 2.24). Тертя в опорах рамок гіроскопів ГГ, ГВ визначаємо як . Пунктирними лініями тут позначено канали взаємовпливу між елементами гірорами. Аналіз рівнянь руху гірорами та їх структурного зображення дозволяє дійти таких висновків: - гіроскопічна рама здійснює стабілізацію за напрямком у двох площинах ВН та ГН; Mz Н H ГГ ГВ f f f п 1/ z k f п / z z T J f ГГ 1/ k f
- 36. 132 Рисунок 2.24. Структурна схема двохосьової гірорами - у кожній площині стабілізації вона є еквівалентною триступеневому гіроскопу; - точність стабілізації рами тим вища, чим більшими є кінетичні моменти H роторів гіроскопів і меншим – тертя кг f , гв f у їх опорах. Mx H H Mz H H -1 -1
- 37. 133 2.1.8. Гіроскопічна платформа та її системи В сучасних стабілізаторах поля зору прицілів у якості гіроскопічних датчиків кута широко використовують гіроплатформи (рис.2.25). Гіроплатформа – це двохкомпонентний гіроскопічний датчик кута, який складається із платформи гірорами (ПГР), рами (РГР) і основи О. При використанні двохосьової гірорами як задавача кутового положення озброєння її доцільно встановлювати в прицілі таким чином, щоб осі обертання роторів гіроскопів були паралельними осі каналу ствола гармати у, а вісь обертання рами – паралельна осі цапф х. Така орієнтація при направленні векторів кінетичних моментів гіромоторів у протилежні боки забезпечує стабілізацію рами і платформи при поздовжньо-кутових та горизонтальних кутових коливаннях корпусу танка. Гірорама є нечутливою до поперечно-кутових коливань, тому для врахування цих коливань в СУВ встановлюють датчик крену. З метою перетворення кутових відхилень гармати і башти у пропорційні електричні сигнали на осях рами і платформи встановлюють ротори індукційних датчиків, наприклад, обертових трансформаторів ОТв, ОТг, статори яких з’єднуються відповідно з основою та рамою гірорами. Сигнали з цих датчиків (ОТг, ОТв) через попередні електронні підсилювачі (блок управління БУ-К1) поступають в силові підсилювачі виконавчих приводів. Останні повертають гармату і башту в стабілізоване положення. Підвищення точності стабілізації гіроскопічної рами досягається введенням до її конструкції системи розвантаження. Для зміни просторового положення платформи гірорама споряджається системою наведення. До складу системи наведення входять електромагніти (електродвигуни) наведення ЕМНв та ЕМНг,
- 38. 134 ротори яких розташовані на піввісях рамок гіроскопів ГВ і ГГ, а статори закріплені на платформі. Рисунок 2.25. Кінематична схема гіроскопічної платформи Робота системи наведення основана на властивості прецесії. При дії моменту наведення Мнв на рамку гіроскопа ГВ платформа разом з рамою прецесіює навколо осі х, тобто повертається у вертикальній площині. При
- 39. 135 подачі сигналу управління електромагніт ЕМНг момент наведення Мнг, прикладений до рамки гіроскопа ГГ, викликає прецесування платформи навколо осі z – повертання у горизонтальній площині. Система розвантаження забезпечує усунення „завалювань” рамок гіроскопів ГВ, ГГ відносно платформи, збереження взаємної перпендикулярності усіх трьох осей кожного гіроскопа, створення моментів розвантаження, які протидіють зовнішнім збуренням. Система розвантаження двохосьової гірорами складається з датчиків розвантаження ДРв, ДРг, електронних підсилювачів та електродвигунів розвантаження ЕРв, ЕРг. Підсилювачі сигналів датчиків розвантаження ДРв, ДРг, на рис. 2.25 не показані (розташовуються в електроблоках П2 виробів 1Г42, 1Г46). Датчики розвантаження вимірюють кути β1, β2 повороту рамок гіроскопів ГВ, ГГ відносно платформи і перетворюють їх в електричні сигнали, які підсилюються підсилювачами, котрі знаходяться в окремому електроблоці і подаються на електродвигуни розвантаження. Електродвигуни розвантаження ЕРв, ЕРг формують на рамі та платформі моменти розвантаження Мрв, Мрг, які за знаками протилежні зовнішнім моментам Мх та Мz. Таким чином, система розвантаження зменшує сумарні моменти, що діють на гірораму, тобто розвантажують її. Для того щоб якнайповніше компенсувати дію зовнішніх збурювальних моментів, намагаються максимально зменшити інерційність системи розвантаження і по можливості збільшити її передавальний коефіцієнт. 2.1.9. Гіроскопічний датчик кутової швидкості На відміну від триступеневого двохступеневий (рис. 2.26) гіроскоп має тільки одну рухливу рамку. Якщо основа, на якій установлено гіроскоп, рухається у просторі з кутовою швидкістю ω0, то гіроскопічний
- 40. 136 момент (x) Гу М викликає прецесійний поворот рамки разом з ротором гіроскопа навколо осі у із кутовою швидкістю ωу доки кут повороту рамки не стане дорівнювати 90º. Рисунок 2.26. Кінематична схема гіроскопічного датчика кута швидкості. У реальних системах стабілізації не можна допустити великих кутів повороту рамки двоступеневого гіроскопа. Тому її у початковому положенні центрують пружиною (торсіоном) Т. Прецесійне повертання рамки припиниться, коли гіроскопічний момент буде зрівноважений центрувальним моментом торсіона. Двоступеневий гіроскоп, споряджений центрувальним торсіоном, електромагнітним демпфером, який на рис. 2.26 не показаний та індукційним датчиком ОТ, далі називатимемо гіроскопічним датчиком швидкості (ГДШ). Складемо рівняння датчика швидкості: ( ) тр т г , x j y y y M M M M x x z z y T x0 y0 z0 ω0 ω0 ωy ОT ΩP H Mторс MTPy Mjy β
- 41. 137 де , , – інерційний момент рамки і ротора, момент тертя в опорах рамки і момент торсіона відповідно; – гіроскопічний момент, зумовлений поворотом основи навколо осі х. Розкриваючи значення моментів, маємо: де – момент інерції ротора і рамки; β ‒ кут повороту рамки; y f – коефіцієнт в’язкого тертя в опорах; Ст – жорсткість торсіона; Н – кінетичний момент гіроскопа; β – кут повороту рамки; ω0 – швидкість повороту основи. Переходячи до операторної форми запису і вводячи позначення сталих часу визначаємо передавальну функцію датчика швидкості і будуємо його структурну схему (рис.2.27), вважаючи вихідним сигналом ту ЕРС, що знімається з обертового трансформатора. Таким чином, за своїми динамічними властивостями гіроскопічний датчик швидкості є інерційною ланкою другого порядку. 2 2 т 0 β/ β/ β ω , y y J d dt f d dt C H т 2 2 0 4 3 β / ( ) ω 1 H C W p T p T p ( ) г x y M j y M тр y M т M y J 4 т , y J T C 3 т , y f T C
- 42. 138 Рисунок 2.27. Структурна схема гіроскопічного датчика кутової швидкості За умови постійної кутової швидкості повороту основи рамка гіроскопа відхиляється на постійний кут, а сигнал на виході ОТ залишається без змін: Статична характеристика ГДШ наведена на рис. 2.28, а. Характер перехідного процесу (рис. 2.28, б) визначається співвідношенням конструктивних параметрів датчика швидкості: Рисунок 2.28. Характеристики гіроскопічного датчика швидкості: а – статична; б – динамічна уст ОТ 0 т ω / . e k H C 1 0 т . 2 2 y y f T d T J C ω0=1(t ) ω 0 ε 1 1 ε t без демпфера з демпфером а) б)
- 43. 139 Внаслідок мализни тертя в опорах рамки ГДШ показник коливальності становить . Отже, коливання рамки затухатимуть у часі дуже повільно. Це утруднює практичне використання ГДШ. Для гасіння коливань у реальних конструкціях застосовують демпфери – електромагнітні, повітряні. За наявності демпфера маємо: де fД – передавальний коефіцієнт демпфера. Слід відзначити, що чутливість ГДШ збільшується пропорційно кінетичному моменту ротора гіроскопа і зменшується при підвищенні жорсткості торсіонна. Для вимірювання швидкостей кутових відхилень башти датчик швидкості необхідно встановити таким чином, щоб його вимірювальна вісь х була паралельною осі обертання башти. Конструктивна схема гіроскопічного датчика швидкості стабілізаторів танків Т-72, Т-64Б, Т-80У, Т-84 подається на рис 2.29. Датчик швидкості призначається для виміру абсолютної кутової швидкості відхилення гармати в вертикальній площині (башти в горизонтальній площині) і перетворення цієї швидкості в обертовому трансформаторі 10,11 в електричний сигнал, амплітуда якого пропорційна величині швидкості гармати (башти), а фаза при зміні напрямку швидкості змінюється на 1800 . Введення сигналу від датчика швидкості в сумарний сигнал управління стабілізатором зброї підвищує його швидкодію забезпечує гасіння коливань стабілізованого озброєння і підвищує точність роботи системи. Основними елементами ГДШ являються двоступеневий гіроскоп 5,7, обертовий трансформатор 10,11, електричний демпфер 1,2, торсіон 12. д 0 т 2 y y f f d J C 1 0 d
- 44. 140 Рамка 5 разом з гіромотором 7 може обертатись навколо своєї вісі підшипниках, які встановлені в корпусі 3 датчика. а) б) Рисунок 2.29. Типовий датчик швидкості стабілізатора гармати. а- загальний вигляд; б- поперечний переріз. 1– корпус з магнітопроводом демпфера; 2– котушка електромагніта демпфера; 3– корпус ГДШ; 4– склянка; 5– рамка гіроскопа; 6,9– колодки з’єднання; 7– ротор; 8– контакти ГДШ; 10– статор ОТ; 11– ротор ОТ; 12– торсіон; 13– контактна букса; 15– амортизатор На вісі рамки 5 закріплений ротор 11 ОТ, а його статор 10 жорстко зв’язаний з корпусом ГДШ. ОТ - безконтактний багатополюсний перетворювач, кутової швидкості в напругу вихідного сигналу. Основні технічні характеристики ОТ, рід струму живлення – змінний, двофазний, напругою 36В, частотою 400Гц; крутизна характеристики при навантаженні 10 кОм, 50 В/рад (0,9 В/град); зона лінійності ± 200 . 4 5 3 4 13 8
- 45. 141 Торсіон 12 виконаний у вигляді пластичної пружини, яка одним кінцем закріплена в рамці гіроскопа, а другим – в корпусі ГДШ. Жорсткість торсіона дорівнює 19 кгсм/рад. Електричний демпфер складається із корпуса 1 мгнітопровода, котушки 2 збудження і циліндричної склянки 4, закріпленої на рамці 5 гіроскопа. При коливаннях рамки гіроскопа склянки 4 буде переміщуватись в кільцевому зазорі магнітопроводу і в ньому будуть індукціюватися вихрові струми. Взаємодія магнітного потоку магнітопроводу з вихровим струмом утворює гальмуючий момент для рамки Рисунок 2.30. Електрична схема гіротахометрів стабілізатора башти та стабілізатора гармати
- 46. 142 Зазвичай в танках Т-64Б, Т-80, Т-84 гіротахометри стабілізатора башти та стабілізатора гармати об’єднуються в один блок, який монтується внизу казенної частини гармати та має наступну електричну схему, яка приведена на рис. 2.30. Згідно з електричної схеми блоку гіротахометрів, видно, що ГТ-ВН за конструктивною будовою та електричною схемою відрізняється від ГТ- ГН наявністю інерційного контакту ПК1. Цей контакт спрацьовує при швидкостях відскоку гармати у 7,5-8,5 град/с від верхнього чи нижнього упорів та замикає електричне коло електромагнітів ЦВ-ЕМ1, ЦВ-ЕМ2 гідростопоріння гармати. 2.1.10. Волоконно-оптичний гіроскоп та його переваги Волоконно-оптичний гіроскоп (ВОГ) — це волоконно-оптичний інтерферометр, в якому розповсюджуються зустрічні електромагнітні хвилі з наступним їх об’єднанням Найбільш поширений варіант ВОГ — багатовиткова котушка оптичного волокна. ВОГ відноситься до оптично-електронних приладів-гіроскопів і у ряді випадків може повністю замінити складні і дорогі електромеханічні (роторні) гіроскопи і двовісьові гіроскопічні платформи і рами завдяки простоті його конструкції, підвищеній точності, дешевизні та достатньої точності виміру швидкості обертального руху об’єкту. Високочутливий ВОГ з'явився лише з промисловою розробкою одномодового діелектричного світловода з малим загасанням променя. ВОГ мають ряд переваг перед класичними (електромеханічними) гіроскопами, основними з яких є практично миттєва готовність до роботи, оскільки не витрачається час на розкручування ротора; малі габарити і маса конструкції, завдяки можливості створення ВОГ повністю на інтегральних оптичних схемах; незначне споживання енергії при стандартному низьковольтному
- 47. 143 електроживленні; великий динамічний діапазон вимірювання кутових швидкостей одним і тим же приладом; здатність працювати в інерціальній системі управління і стабілізації об'єкту без гіромеханічних похибок. Принцип дії волоконно-оптичного гіроскопа ВОГ носить назву «гіроскопічний» тому, що може бути покажчиком обертання об’єкту, хоча ротор у ВОГ відсутній. Основним елементом оптичного гіроскопа є замкнутий оптичний контур із багатовиткової котушки з оптичного волокна, по якому розповсюджуються зустрічно прямуючі світлові промені. Принцип дії оптичних гіроскопів заснований на «вихровому» ефекті Сан’яка [7,15]. Якщо в замкнутому оптичному контурі в протилежних напрямах розповсюджуються два світлових промені, то при нерухомому контурі фазові набіги обидвох променів, що пройшли весь контур, будуть однаковими. Під час обертання контуру навколо вісі, перпендикулярної до площини контуру, фазові набіги променів неоднакові, а різниця фаз променів пропорційна кутовій швидкості обертання Ω контуру Q. На рис. 2.31 зображений ідеальний кільцевий оптичний контур радіусу RK . Промінь світла приходить у точку А і за допомогою дзеркал 31 і 32 розщеплюється на два променя, один з яких розповсюджується у контурі за годинниковою стрілкою, а інший проти годинникової стрілки. За допомогою цих же дзеркал, після розповсюдження в контурі, промені об'єднуються і прямують одним шляхом. При нерухомому контурі шляхи проходження променів однакові і рівні: (2.7) де с- швидкість світла; - час проходження периметра контуру променем. , 2 c Rk
- 48. 144 Рисунок.2.31. Ефект Сан’яка в кільцевому оптичному контурі. Обидва променя приходять у точку А на розчіплювач у фазі. Якщо контур (основа) обертається з постійною кутовою швидкістю Ω, то промінь, який розповсюджується за годинниковою стрілкою, перш ніж потрапляє на розчіплювач, що переміщається, пройде шлях: (2.8) Це викликано тим, що за час проходження променем по замкнутому контуру розщеплювач, який знаходився раніше в точці А, піде в точку В. Для променя, що розповсюджується проти годинникової стрілки, шлях буде: . (2.9) Як видно, шляхи проходження променів, що рухаються протилежно, різні. Оскільки швидкість світла величина постійна, то це еквівалентно різному часу τ+ і τ-. проходження променів, що розповсюджуються у протилежних напрямах замкнутого контуру. Різниця часу розповсюдження променів, або відносне запізнювання зустрічних хвиль визначається із виразу: Промінь Контур Q . 2 c R R k k . 2 c R R k k
- 49. 145 (2.10) Тут в наближенні першого порядку (добутком відносно швидкості с нехтуємо), а площа всього контуру . Якщо відносне запізнювання зустрічних хвиль, яке з’явилось під час обертання, виразити через різницю фаз зустрічних хвиль, то вона складе: (2.11) де — кутова швидкість хвиль випромінювання; , v — довжина та частота хвиль випромінювання; Різниця фаз називається фазою Саньяка, та як видно із формули, вона пропорційна кутової швидкості обертання Ω оптичного контуру. Для багатовиткового контуру з числом витків N та довжиною нитки оптичного волокна N R 2 L K , що намотана на циліндр радіуса RК, фаза Саньяка для ВОГ складає: , c RL 4 с NS 8 с (2.11) де Ω — кутова швидкість основи з розташованим на ній контуром. Вимірюючи електронним пристроєм різницю фаз, можна отримати інформацію про кутову швидкість обертання об'єкту, на якій закріплений оптичний контур. Інтегруючи виміряний сигнал, отримують кут повороту основи (об'єкту). Ця інформація потім використовується для управління і стабілізації об'єктів (дзеркал). 2 2 k R 2 k R S 2 с с , 4 4 ) ( 4 2 2 2 2 2 2 2 c S c R R c R k k k , 8 8 4 2 2 с S c S c S с
- 50. 146 Основні елементи волоконно-оптичного гіроскопа На рис. 2.32 представлена схема пристрою ВОГ. Випромінювання лазерного діода (світловий випромінювач 1) подається на світлоподільник 2 та поділяються на два промені. Два промені, що обійшли контур в протилежних напрямах, рекомбінують на світлоподільнику 2 і змішуються у фотодетекторі 3. Як відомо основними елементами ВОГ є волоконний контур, світловий випромінювач 1 і фотодетектор 3. Наявність цих елементів необхідна, але недостатня для конструкції даного гіроскопа. Залежно від конструктивних особливостей конкретного типу ВОГ використовуються самі різні типи оптичних елементів і електронних систем обробки сигналу. Окрім названих оптичних елементів в конструкціях ВОГ застосовують поляризатори, фазові пластинки, ротатори (обертаючі площини поляризації), фазові і частотні модулятори, з'єднувачі і світлоподільники променів, просторові фільтри, дзеркала, інтегральні оптичні схеми тощо. Рисунок 2.32. Принципова схема ВОГ. 1 — світловий випромінювач, 2 — світлоподільник, 3 — фотодетектор, 4 — електроний пристрій обробки. Ω Волоконний контур Ω R i0 I0
- 51. 147 В останні роки для виготовлення ВОГ розробники все частіше використовують так зване одномодове волокно (відношення (мода) a/λ=5…10, де а — радіус світловедучого осердя волокна, λ — довжина хвилі світла із стійкою поляризацією), що дозволяє зменшити втрати, зберегти сталу поляризацію моди на великих довжинах світловода, позбавитись причин відсутність дисперсії і розсіювання мод та зменшення дисперсії матеріалу. ВОГ, побудований безпосередньо на одномодовому оптичному волокні, вимагає розробки прецизійних з'єднувачів, поляризаторів, фільтрів, фазових модуляторів та інших елементів, Збереження поляризації досягають спеціальними методами виготовлення одномодового волокна [ ]. В якості світлового випромінювача 1 в конструкціях ВОГ використовують, як правило, напівпровідникові лазери (лазерні діоди — ЛД), світлодіоди (СД) і суперлюмінісцентні діоди (СЛД). Так як ширина спектру випромінювання складає 20... 50нм, то СЛД використовуються в багатьох конструкціях ВОГ завдяки достатньо гарної сполученості зі світловодом — майже такої, яка досягається у ЛД із застосуванням додаткових лінз для належного фокусування світла. Це необхідно для того, щоб випромінювач інжектував в одномодовий волоконний світловод достатню оптичну потужність, близько 100 і більше мікроват. Фотодетектор 3 з ВОГ перетворює оптичну інтерференційну картину на його вході у вихідний електричний сигнал. Оскільки інтенсивність інтерференційного оптичного сигналу залежить від співвідношення фаз двох променів, що інтерферують, амплітуда електричного сигналу, лінійно пов'язана з інтенсивністю оптичного сигналу та відображає згадані фазові співвідношення. У свою чергу, відповідно до ефекту Саньяка, різниця фаз двох променів пропорційна кутовій швидкості обертання ВОГ. Ця специфіка застосування фотодетектора у ВОГ накладає певні вимоги на
- 52. 148 параметри і характеристики фотодетектора. Перш за все фотодетектор повинен володіти дуже високою чутливістю з тим, щоб «відчувати» такі градаціїні зміни інтенсивності випромінювання, які відповідають різниці оптичних коливань порядку 10-7 рад, що еквівалентно кутовій швидкості обертання ВОГ приблизно 10-2 ... 10-3 град/год = 10-2 …10-3 дуг·с/с. Окрім того, ФД повинен забезпечуватися необхідним діапазоном динамічної зміну сигналу, швидкодію, відповідати вимогам сумісності зі світловодом і електропристроїм, споживати малу енергію, мати малі габарити і мати якомога меншу залежність від зовнішніх умов. Вказаним вимогам найбільш повно відповідають твердотільні напівпровідникові фотодіоди (ФД), р- і-n фотодіоди та лавинні фотодіоди. ФД має один р-n- перехід, в якому відбувається перетворення світлової енергії в електричну. Корпус ФД обладнаний додатковою линзою, яка спрямовує перпендикулярно р-n –переходу зовнішній світловий потік. Принцип роботи ФД заснований на фотовольтовому ефекті, який полягає в тому, що під час опромінювання неоднорідного напівпровідника світлом виникає фотострум (або фото – ЕРС). ФД сконструйовані на основі р-n переходів, а фотозбуджені електрони і дірки, області переходу, що утворюються усередині, і в об'ємі напівпровідника дифундують до переходу, утворюючи фотострум. Фотодіод з р-i-n-структурою (p-i-n-фотодіод) має досить широку область власної провідності (i-область), яка розташована між двома областями напівпровідника протилежного знаку провідності (р-n). У i- области розподілено сильне однорідне електричне поле, що сприяє збільшенню чутливості фотодіода. Лавинний фотодіод (ЛФД) є твердотільним аналогом фотоелектронного помножувача. У ньому використовується механізм ударної іонізації в області сильного поля зворотньозміщеного переходу.