
Recommended
More Related Content
More from ssuser5136e4
More from ssuser5136e4 (20)
Recently uploaded
Recently uploaded (7)
5 Загальні відомості про комплекси.pdf
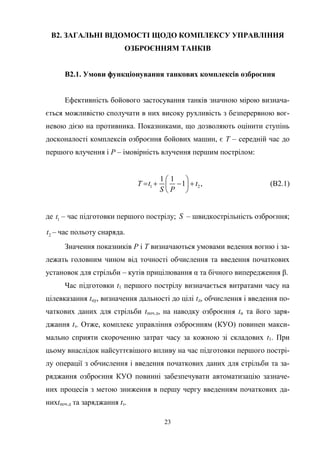
- 1. 23 В2. ЗАГАЛЬНІ ВІДОМОСТІ ЩОДО КОМПЛЕКСУ УПРАВЛІННЯ ОЗБРОЄННЯМ ТАНКІВ В2.1. Умови функціонування танкових комплексів озброєння Ефективність бойового застосування танків значною мірою визнача- ється можливістю сполучати в них високу рухливість з безперервною вог- невою дією на противника. Показниками, що дозволяють оцінити ступінь досконалості комплексів озброєння бойових машин, є Т – середній час до першого влучення і Р – імовірність влучення першим пострілом: 1 2 1 1 1 , T t t S P (В2.1) де 1 t – час підготовки першого пострілу; S – швидкострільність озброєння; 2 t – час польоту снаряда. Значення показників Р і Т визначаються умовами ведення вогню і за- лежать головним чином від точності обчислення та введення початкових установок для стрільби – кутів прицілювання α та бічного випередження β. Час підготовки t1 першого пострілу визначається витратами часу на цілевказання tцу, визначення дальності до цілі tд, обчислення і введення по- чаткових даних для стрільби tпоч.д, на наводку озброєння tн та його заря- джання tз. Отже, комплекс управління озброєнням (КУО) повинен макси- мально сприяти скороченню затрат часу за кожною зі складових t1. При цьому внаслідок найсуттєвішого впливу на час підготовки першого пострі- лу операції з обчислення і введення початкових даних для стрільби та за- ряджання озброєння КУО повинні забезпечувати автоматизацію зазначе- них процесів з метою зниження в першу чергу введенням початкових да- нихtпоч.д та заряджання tз.
- 2. 24 Час першого влучення Т суттєво залежить і від точності стрільби – імовірності влучення Р – і від швидкострільностіS озброєння. Остання ба- гато в чому визначається часом заряджання tз. Забезпечення потрібної швидкострільності – одна з найважливіших вимог до комплексів управлін- ня танковим озброєнням. Значення імовірності влучення Р визначається, в першу чергу, точні- стю обчислення кутів прицілювання α та бічного випередження β. Основ- ний вплив на їх обчислення чинить похибка вимірювання дальності до ці- лі. Отже, КУО танків мають забезпечувати максимальну точність вимірю- вання дальності, а з метою скорочення часу підготовки пострілу – автома- тизацію процесів введення виміряної дальності в установки прицілів. Умови стрільби звичайно поділяють на балістичні (спрацювання ка- налу ствола, температура заряду, форма і маса снаряда, його початкова швидкість, тощо), метеорологічні (температура повітря, атмосферний тиск, швидкість вітру), топографічні (крен танка, розташування цілей). При цьо- му враховуються і тактичні умови: ведеться стрільба з місця чи з ходу, не- рухома чи переміщується ціль на полі бою. Спрацювання каналу ствола, відхилення маси снаряда від розрахункової, зміна температури заряду при- водять до зміни початкової швидкості снаряда, а отже, і розрахункової да- льності стрільби. Зміна розрахункової траєкторії польоту снаряда визнача- ється температурою повітря та барометричним тиском. Крен і поперечні коливання цапф озброєння, вітер на ділянці польоту снаряда ведуть до йо- го відхилення як за напрямком, так і за висотою. Разом з тим, як свідчить досвід, найсильніше на точність стрільби впливають кутові та лінійні пе- реміщення озброєння при рухові танка по місцевості.На імовірність влу- чення Рвпливаєяк дальність Д так і досконалість комплексу озброєння (рис.В2.1).
- 3. 25 Рисунок В2.1. Зміна імовірностей влучення при стрільбі з танків з рі- зними комплексами озброєння: 1 – при стрільбі з місця з сучасним комплексом озброєння; 2 – при стрільбі на ходу з сучасним комплексом озброєння; 3 – при стрільбі на ходу з дещо простішим комплексом озброєння Дляаналізу просторових коливань танка використовується інерцій- на система координат X, Y, Z, нерухома щодо Землі (рис.В2.2). Координат- ні системи корпусу, башти та озброєння (гармати) позначимо відповідно індексами к, б, о. У першому наближенні складний просторовий рух корпусу танка прийнято розглядати як поступальний разом з його центром мас Ок та обе- ртальний навколо точки Ок. Положення центра мас в інерційній системі координат характеризується радіусом-вектором R , , x y z . Змінні складові радіуса-вектора називаються відповідно поперечними X, поздовжніми Yта вертикальнимиZ лінійними коливаннями. Обертання корпусу характеризу- ється трьома незалежними координатами, за які прийнято три кута Ейлера (φ, γ, ψ). У першому наближенні дані кути визначають кутові коливання корпусу: φ – поздовжні кутові коливання (навколо осі ОкХк), γ – поперечні кутові коливання (навколо осі ОкYк), ψ – горизонтальні кутові коливання (навколо осі ОкZк). Д P P3 0 P2 0 P1 0 2 3 1
- 4. 26 Рисунок В2.2. Координатні системи танка Параметри лінійних та кутових коливань кожного типу машин ви- значаються експериментально для найбільш імовірних умов руху. У табл.1 наведені середні значення параметрів коливань корпусу основних танків. Виняток становлять швидкості лінійних переміщень. Це пояснюється тим, що швидкості усіх видів лінійних коливань є незначними (2–4 м/с) і вони практично не впливають на ефективність стрільби з ходу. При веденні бойових дій гармата завжди має кут підняття φГКвіднос- но корпусу, а башта може бути повернута на кут ψБК. Кутові коливання озброєння визначають на підставі даних про кутові коливання корпусу та матриці переходу від координатної системи ХК, YК, ZК до координатних си- стем гармати (озброєння) ХГ, YГ, ZГ або башти ХБ, YБ, ZБ [1]. X0 Zг XК Z1 Zк Y1 Yк X1 Y О X Z Zi Оi Xi Yi О0 Yг R ОБ ОК ΨБК ZБ Z1 YБ X1 Xк XБ Zк ΦГК
- 5. 27 Аналіз даних табл.В2.1, їх перерахунок у кутові та лінійні коливання гармати і башти показує, що суттєвий вплив на роботу комплексів озбро- єння танків чинять лінійні прискорення внаслідок великих незрівноваже- ностей як гармат, так і башт танків: Таблиця В2. 1. Середніпараметриколивань корпусу основнихтанків Види і параметри коли- вань Поздовжні Поперечні Горизонтальні позна- чення зна- чення позна- чення зна- чення позна- чення зна- чення Лінійні Амплітуда, мм Yк 150 Хк 100 Zк 150 Прискорення, м/с2 ay 1,4 ax 0,4 az 0,82 Кутові Амплітуда, град φк 2,5 γк 1,8 ψк 1,2 Швидкість, град Ωφк 8,25 Ωγк 6,3 Ωψк 1,6 MН + malH, (В2.2) де MН – момент збурення, що відхиляє гармату (башту) від напрямку на ціль; m– маса гармати (башти); lH– плече неврівноваженості. Відхилення озброєння від напрямку цілі під дією моментів збурення, зумовлених лінійними прискореннями, приводять до зниження ефективно- сті стрільби з ходу. Поздовжні кутові коливання озброєння безперервно змінюють кут підняття гармати (рис. В2.3б) і викликають розсіювання снарядів і куль по висоті (дальності). Так, при стрільбі на дальність Д = 1000 м та куті φо= 2,5º розсіювання по висоті становитиме 41,7-42 м. Горизонтальні коливання (рис. В2.3а), зумовлені у першу чергу ма- невром танка і неминучими при водінні змінами напрямків руху та внаслі-
- 6. 28 док нерівномірного натягу гусеничних стрічок, збільшують бічне розсію- вання снарядів до 20-21м при Д-1000м і ψк = 1,2 º. Рисунок В2.3. Вплив кутових (а), поздовжніх (б) та поперечних (в) коливань озброєння на точність стрільби Поперечні кутові коливання викликають нахили осі цапф гармати, зміщуючи дульний зріз (рис.В2.3, в) як у вертикальній площині ΔZ, так і в горизонтальній ΔX. Точність стрільби падає. При цьому чим більшим буде кут підняття гармати, тим суттєвішими є відхилення озброєння від задано- го наводкою напрямку. Стрільба з ходу без стабілізатора не ефективна, так як при дальності стрільби на Д=500м зі штатної гармати, яка установлена на шасі танка, що рухається зі швидкістю до 25 км/год, імовірність влучення в прямокутник зі сторонами 6540 х 2170мм знижується з 97,3% до 5,3%, тобто в 18,5 раз. Кутові та лінійні коливання танка, що рухається, є не лише причи- ною зниження імовірності влучення у ціль. Вони також суттєво погіршу- ють умови видимості через прилади спостереження і прицілювання та ви- явлення цілей, що призводять до збільшення помилок наведення і часу під- готовки пострілу.
- 7. 29 Удосконалення КУО і підвищення їх ефективності КУО передбачає врахування і компенсацію впливу на роботу озброєння та екіпажу як ліній- них так і кутових коливань. В2.2. Структура і функціональні можливості КУО Сучасні КУО являють собою (рис.В2.4) сукупність пристроїв, меха- нізмів, приладів і систем, що забезпечують автоматизацію процесів управ- ління озброєнням танків з метою підвищення точності прицільного вогню за рахунок зменшення помилок наведення під час стрільби з ходу та поми- лок підготовки початкових даних для стрільби. Різноманітність тактичних умов спостереження та розвідки цілей бо- йової машини вимагає оснащення робочих місць членів екіпажу прилада- ми спостереження і вимірювання дальності. На цей час на вітчизняних і зарубіжних танках застосовуються автономні приціли Пр та далекоміри Д-р або конструктивно об’єднані приціли-далекоміри, наприклад 1Г42. Дальність, виміряна навідником, може автоматично вводитись в установки прицілу, що скорочує час підготовки пострілу. Найбільш досконалі приці- ли-далекоміри можуть мати вбудовані пристрої, які забезпечують їх нала- годження, діагностику, вивірення положення оптичних каналів прицілу та далекоміру. Специфічною особливістю стрільби з ходу є наявність зовнішніх збурень, зумовлених коливаннями корпусу танка, що рухається. Коливання корпусу танка негативно позначаються як безпосередньо на результатах стрільби, так і на працездатності членів екіпажу у процесі їх дій при озбро- єнні. Внаслідок цього імовірність влучення у ціль під час стрільби з ходу різко знижується, а час до першого влучення зростає.
- 8. 30 Рисунок В2.4. Структура комплексу управління озброєнням Похибки наведення досить значні навіть у тих випадках, коли коли- вання корпусу відбуваються з відносно невеликими амплітудами і часто- тами, оскільки кутові частоти коливань озброєння (4–8 рад/с) перевищу- ють можливість людини з обробки непогоджень (3 рад/с). Як результат мають місце суттєве зростання відхилень прицільної лінії від напрямку на ціль та безперервне коливання прицільної марки відносно цієї лінії. Кутові коливання озброєння спричинюють зміну напрямку вектора початкової швидкості снаряда при вильоті його зі ствола, що, у свою чергу, збільшує розсіювання, а отже, зменшує імовірність влучення. Для забезпечення високої імовірності влучення необхідно суттєво зменшити амплітуди і швидкості кутових коливань як озброєння (знижен- ня впливу запізнювання пострілу та зміна напрямку вектора початкової швидкості снаряду), так і поля зору прицілу Пр (зменшення помилок наве- дення). Це досягається шляхом введення до складу КУО стабілізаторів озброєння (гармати) (СГ), башти (СБ) і лінії прицілювання (СЛП).
- 9. 31 При обладнанні на танку систем стабілізації СГ та СБ амплітуди поз- довжніх кутових коливань основного озброєння φГ (ОО) під час руху танка зменшуються у 30–40 разів, горизонтальних кутових ψБ коливань – у 10–12 разів, а їх кутові швидкості відповідно у 8–10 та 3–5 разів. Системи стабі- лізації озброєння є невід’ємною частиною автоматизованих КУО сучасних танків. Введення до складу КУО незалежної системиСЛП забезпечує, крім того, можливість наводчикові безперервно спостерігати за полем бою, оскільки φЛП ˂ φК, оцінювати результати стрільби після виконання пострі- лу, не втрачаючи ціль з поля зору, і приймати рішення щодо введення пот- рібних корегувань. СЛП, як правило, є складовою прицілів-далекомірів. Збільшення калібрів танкових гармат дозволяє успішно вирішувати вогневі задачі не лише на малих, але і на середніх дальностях. Це зумовило необхідність додаткового урахування чинників, які на малих дальностях значного впливу на стрільбу не чинять. (поперечні коливання озброєння, бічний вітер на траєкторії польоту снаряду, спрацювання каналу ствола та ін.). Задача вирішується введенням до складу КУО ТБО та датчиків вхід- ної інформації ДВІ. Зовнішні чинники yi, вплив яких на стрільбу необхідно врахувати, вимірюються і перетворюються у пропорційні електричні сигнали Ui цими датчиками Дi. Утворені в них сигнали подаються на вхід ТБО, куди одно- часно вводиться виміряна далекоміром дальність до цілі. Потрібна програ- ма може задаватися вручну оператором за допомогою перемикача баліс- тик (ПБ) на прицілі та відпрацьовуватися відповідною програмою у ТБО чи автоматично за сигналом з механізму заряджання (МЗ). Логіко- обчислювальна система ТБО виробляє сигнали Uα, Uβ, пропорційні кутам прицілювання α та бічного випередження β. Виконавча підсистема забез- печує введення обчислених сигналів кутів прицілювання та бічного випе- редження у приціл Пр, блок дозволу пострілу БДП та їх відпрацювання че- рез системи стабілізаціїСГ і СБ безпосередньо гарматою Δφг і баштою Δψб.
- 10. 32 Технічна досконалість МЗ визначається їх швидкодією, кількістю пострілів у конвеєрі, ергономічністю та надійністю функціонування як електрогідромеханічного комплексу (ЕГМК) МЗ так і пультів управління (блоку управління МЗ, пультів: оператора ПО, завантаження ПЗ і дублю- вання ПД). У сучасних умовах танкові війська мають вирішувати бойові задачі з широким використанням маневру по фронту і в глибину. Їх частини і під- розділі можуть виконувати пересування в умовах обмеженої видимості, на незнайомій місцевості. Отже, для ефективного керування вогнем і манев- ром танків, організації їх взаємодії виникає необхідність у наявності інфо- рмації про місце розташування на місцевості частин і підрозділів, окремих машин, координат цілей Xц, Yц, вогневих позицій. Отримання потрібної навігаційної інформації може бути забезпечене введенням до складу КУО систем навігаційного забезпечення (СНЗ). У су- часних СНЗ знаходять застосування електромеханічні та електронні еле- менти супутникової системи навігації. Можлива висока насиченість поля бою протитанковими засобами пі- двищує вимоги і до КУО танків щодо швидкості виконання операцій з під- готовки до відкриття вогню по виявленій цілі. У зв’язку з цим доцільне введення до складу КУО систем дубльованого керування озброєнням ко- мандиром(ПКок.) Дубльоване керування системами стабілізації СГ, СБ, СЛП підвищує живучість і надійність комплексу в цілому. Ефективне застосування основного озброєння (ОО) танка практично обмежується дальностями 2000–2500 м. Проте в умовах сучасного бою особливо важливі цілі повинні бути надійно та швидко уражатись і на ве- ликих дальностях. Ця задача може бути вирішена введенням у КУО систе- ми наведення і управління ракетою СНУР. Управління ракетним озброєн- ням РО може бути здійснене спільною взаємодією СНУР з рештою елеме- нтів комплексів.
- 11. 33 Таким чином, КУО сучасних танків являють собою складну компо- зицію автоматичних пристроїв і систем, які взаємодіють між собою і до- зволяють успішно вирішувати задачі з забезпечення ефективного вогню з ходу. Комплекси управління озброєнням конкретних зразків БТОТ мо- жуть містити ті чи інші складові з наведених систем. Проведений аналіз свідчить, що найбільший вплив на зростання яко- сті КУО чинить стабілізатор гармати СГ (рис.В2.5); за ним у порядку зме- ншення вагомості йдуть: стабілізатор башти СБ, стабілізатор лінії приці- лювання СЛП, далекомір Д-р, балістичний обчислювач ТБО. Рисунок В2.5. Вплив окремих пристроїв на якість найпростішого КУО. ΔР,ΔТ – зміна імовірності влучення (середнього часу) Таким чином, системи стабілізації є основою сучасних комплексів управління озброєнням і лише після установки на танки систем СГ та СБ доцільно вводити до складу КУО інші підсистеми.
- 12. 34 В2.3. Системи стабілізації – основа комплексів керування озбро- єнням Системи стабілізації основного озброєння являють собою спеціальні системи автоматичного регулювання, призначені для наведення озброєння у ціль і збереження (стабілізації) заданого наводкою напрямку осі каналу ствола гармати при коливаннях корпусу танка, що веде вогонь. Незважаючи на те що стабілізатори гармат і башт суттєво відрізня- ються за конструкцією, однак вони виконуються за однією і тією ж функ- ціональною схемою (рис.В2.6). Основними елементами стабілізатора озброєння є: об’єкт регулю- вання (гармата або башта), датчики кутового положення, швидкості та збурень, що встановлюються безпосередньо на об’єкті регулювання, під- силювально-перетворювальний пристрій (електронний підсилювач), вико- навчий електромеханічний (електрогідравлічний) привод, пульт управлін- ня ГДПС. Стабілізатор гармати, так і стабілізатор башти являють собою за- мкнені автоматичні системи з регулюванням за відхиленням об’єкта стабі- лізації (гармати або башти) від заданого наводкою напрямку. Рисунок В2.6. Функціональна схема стабілізатора ψг(ψБ) UЕДН (ΩБ) Ωг Мст Мy UВП UΣ Uy Датчик швидкості Гіродатчиккуто- вогоположення Виконавчий привод Датчик збурювань Гармата або башта Uзб UДШСДШ UДКСДК φК(ψК) φг(ψБ); Ωг(ΩБ) Пульт Мy UЕП Підсилювач електронний
- 13. 35 Потрібний напрямок пострілу φг(ψб) під час стрільби на певну даль- ність задається навідником. Якщо під дією моменту Мy, зумовленого коли- ваннями корпусу танка, об’єкт регулювання (гармата башта) відхилиться від заданого напрямку, то датчик кутового положення виміряє відхилення, що виникло, і перетворить його у пропорційний електричний сигнал Uy. Цей сигнал посилюється і перетворюється в електронному ПП та подаєть- ся на вхід виконавчого привода системи. Останній створює момент стабілі- зації Мст, який протидіє моменту Мy та зменшує непогодження об’єкта ре- гулювання з заданим наводкою напрямком.Чим повніше момент стабіліза- ції буде компенсувати момент збурення, тим точніше буде здійснюватись стабілізація озброєння. Для підвищення точності стабілізації об’єкта регулювання до складу стабілізатора введено датчик швидкості, який вимірює абсолютну швид- кість відхилень об’єкта регулювання Ωг(Ωб) від заданого наведенням на- прямку та перетворює її у пропорційний електричний сигнал Uш. Сигнали датчиків кутового положення Uдк та швидкості Uдшскладається на спеціа- льному контурі підсумовування. Сумарна напруга UΣ являє собою сигнал управління виконавчого привода. Формування сумарного керуючого сигналу UΣ може бути реалізоване у системах стабілізації й іншими способами. На рис.10 подано два шляхи одержання сигналу UΣ. У першому варіанті сигнал Uк, пропорційний куто- вому відхиленню об’єкта регулювання, формується датчиком кутового по- ложення, а сигнал Uш, пропорційний абсолютній швидкості відхилення, – диференціюванням сигналу Uк. У другому сигнал Uш знімається з датчика швидкості, а сигнал Uк, пропорційний кутовому відхиленню, одержують інтегруванням сигналу Uш. Отже, у складі стабілізаторів СГ та СБ може бути не два, а один датчик відхилення об’єкта регулювання – датчик куто- вого положення або датчик швидкості, що працюють спільно з диференці- атором або інтегратором відповідно.
- 14. 36 а) б) Рисунок В2.7. Схеми формування сумарного керуючого сигналу ста- білізатора:а) стабілізатор башти танка Т-72; б) стабілізатор БМП-2, БТР-3, БТР-4. Для компенсації впливу найбільш суттєвої складовоїзовнішнього збуренняМy у системах стабілізації може створюватись спеціальні канали регулювання: з датчиком збурень, який вимірює найбільш суттєву складо- ву зовнішнього збурення Мy та перетворює її у пропорційний електричний сигнал UЗБ. Підсилений сигнал датчика збурень надходить на вхід підси- лювача виконавчого привода у вигляді додаткового керуючого сигналу, під дією якого привод створює додаткову складову моменту стабілізації, котра компенсує зовнішній момент Мy. Системи стабілізації, в яких реалізуються одночасно принципи регу- лювання за відхиленням і зовнішнім збуренням, є автоматичними систе- мами комбінованого регулювання. Відповідність показників якості систем стабілізації вимогам техніч- них умов забезпечується експлуатаційними регулюваннями, показаними на рис.В2.6 у вигляді точок потенціометріврегулюванняСДК, СДШ (двигунців потенціометрів). Датчик кутового положення Диферен- ціатор UΣ Uш Uк φг (ψБ) Датчик швидкості Інтегратор Uш Uк UΣ ΩГ Г (ΩБ)