
Recommended
More Related Content
Similar to 17__Osoblivosti_stabilizatora_2E42.pdf
Similar to 17__Osoblivosti_stabilizatora_2E42.pdf (20)
More from ssuser5136e4
More from ssuser5136e4 (20)
Recently uploaded
Recently uploaded (15)
17__Osoblivosti_stabilizatora_2E42.pdf
- 1. 384 3.3. ОСОБЛИВОСТІ ФУНКЦІОНАЛЬНОЇ СХЕМИ, СКЛАДУ, РОЗТАШУВАННЯ І ПРИНЦИП ДІЇ СТАБІЛІЗАТОРА 2Е42-2 3.3.1. Особливості функціональної схеми, складу і розташування стабілізатора 2Е42-2 Особливістю стабілізатора лінії прицілювання в ПДПС, що формує незалежну силову стабілізацію лінії прицілювання у вертикальній площині (додаток 3), є те що він складається із трьохступеневого гіроскопу (Гр) із системою корекції (СК), електромагніту наведення (ЕМн), головного дзеркала (ГДз) прицілу та стрічково-важільної передачі(СВП) з коефіцієнтом передачі і=2:1. Остання зв’язує ГДз із зовнішню рамкою гіроскопу з ГДз, яка може обертатися навколо вісі, що закріплена на підшипниках головки корпусу прицілу, паралельно вісі цапф гармати. При русі танка коливання його корпусу передаються через башту до корпусу прицілу. Встановлений в корпусі трьохступеневий гіроскоп, завдяки властивості стійкості, зберігає положення своєї внутрішньої рами незмінним. Внаслідок цього при повороті корпуса прицілу разом із танком у вертикальній площині на кути к ,головне дзеркало синхронно повертається відносно корпусу прицілу в протилежний бік на кут в двічі менший закорпус прицілу. При цьому коливання поля зору у вертикальній площині практично не відчуваються, оскільки лінія прицілу стабілізується з великою точністю. При необхідності навідник може змінити напрямок лінії прицілювання, що стабілізується. Провертаючи рукоятки пульта управління ПУ навідник за допомогою реостата наведення РНвн змінює величину напруги і відповідно струм Ін в обмотці електромагніта наведення ЕМн. При цьому виникає обертаючий момент наведення Мн відносно внутрішньої рамки, який спричиняє прецесію зовнішньої рамки гіроскопу та зміну величини заданого кута з . Через СВП повертається головне дзеркало, забезпечуючи тим самим
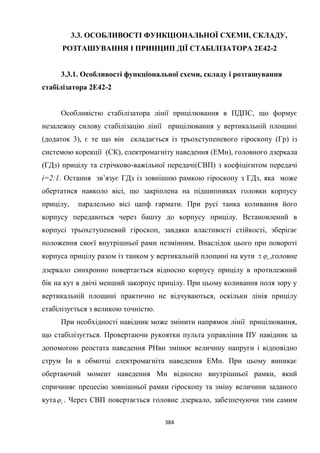
- 2. 385 зміну напрямку лінії прицілювання у вертикальній площини.Розташування складових стабілізатора подається на рис. 3.9. Рис 3.9. Розміщення вузлів стабілізатора 2Е42-2 в башті 1 – датчик кута вертикального наведення ДК-ВН; 2 – стрічково- важільна передача приводу головного дзеркала; 3- головне верхнє дзеркало; 4 –установка живлення; 5 – циліндр виконавчий; 6 – обмежувач кутів; 7 – прилад приведення; 8 – електромашинний підсилювач ЕЕМП 9 – коробка розподільча друга К2; 10- виконавчий двигун з вентилятором обдуву; 11 - датчик лінійних прискорень; 12 – пуль управління; 13 – блок управління БУ- К1;14 – гіроблок;15 – ПТ-800; 16 – стабілізатор частоти і напруги; 17- прилади цілевказання;18 – механізм повороту башти; 19 – контакт стопору башти; 20 – контакти під’ємного механізму гармати; 21 – контакти відкату;
- 3. 386 Стабілізатор башти До складу стабілізатора башти входять: - гіроскопічні датчики кута ГДК-ГН, який знаходятьсяу гіроблоці (14); - канал ЕП ГН, який знаходиться у БУ-К1(13) та складається з наступних елементів: - підсилювач горизонтального наведення П-ГН (плата А11 БУ-К1); - фільтр Ф (плата А9) для корекції динамічних властивостей приводу башти; - імпульсний підсилювач Пімп. (платаА10); - електромашинний підсилювач ЕМП (8); - релейна коробка К2 (9); - виконавчий двигун з вентилятором обдуву ВД (10); - інтегратор напівавтоматичного наведення Інт. НА та сигналу цілевказання ПЦ (плата А8); - датчик лінійних прискорень ДЛП (11). Відмінними особливостями стабілізатора башти у порівнянні зі стабілізатором гармати є наступні: - застосування електромашинного виконавчого приводу замість електрогідравлічного; - відсутність датчика швидкості. Сигнал кутової швидкості переміщення башти отримується шляхом дифференцірування сигналу датчика кута диференціатором в платі Інт. ПА і ПЦ та подається до суматора підсилювача П; - введення додаткового сигнала управління з датчика лінійних прискорень ДЛП в ФЧВ плати А11. Це викликано необхідністю компенсувати зовнішні збурення, обумовлені неврівноваженістю башти танка. Об’єктом регулювання є башта Б танка з встановленим в неї озброєнням, обладнанням та екіпажем. Величини, що регулюються – кут горизонтального наведення Ψб та кутова швидкість башти – Ωб. Принцип дії стабілізатора башти аналогічний описаному нижче принципу дії стабілізатора
- 4. 387 гармати.В режимі напівавтоматичного наведення навідник повертає основу ПУ. Сигнал з потенціометра наведення ПНгн ПУ поступає на інтегратор ПА та ПЦ (плата А8), де формується сигнал управління режиму НАПІВАВТОМАТ. Після цього сигнал проходить відповідні підсилення в підсилювачах ПƩ, Пімп (А10) та надходить в обмотки управління ОУ1, ОУ2 ЕМП. ЕМП виробляє робочу напругу в межах 0...110В та подає її на якір виконавчого двигуна. Для забезпечення пропорційності між вихідною величиною (частотою обертання) та вхідною (кут повороту) в електричній схемі передбачений жорсткий зворотній зв'язок за частотою обертання ВД (ЖЗЗ за Ωвд. ) Для підвищення стійкості та усунення автоколивань приводу башти (підвищення жорсткості механічних характеристик) у приводі реалізований жорсткий зворотній зв'язок за струмом якоря ВД (ЖЗЗ за Ія ВД). СЛП в горизонтальній площині залежна від положення гармати, а кут неузгодження в горизонтальній площині θгп=ψз-ψБ утворюється в ОТ ГДК-ГН, який знаходиться в гіроблоці, котрий встановлений на гарматі. Стабілізатор гармати До складу індикаторного стабілізатора гармати входять: - обертовий трансформатор (ОТ)гіроскопічногодатчикакута ГДК-ВН (1). Вісь зовнішньої рами ГДК-ВН зв’язана з ротором ОТ через стрічкову передачу СП (2) (і=1:1).Основа (статор)ОТ ГДК-ВН через паралелограмний механізм (ПМ) (і=1:1) кінематичнозв’язаназ рухомою частиною гармати. ПМ утворює ЖЗЗ за кутом φг; - гіроскопічний датчик абсолютної швидкості гармати у вертикальній площині ГТ-ВН; - канал електронного підсилювача гармати, який знаходиться в БУ-К1, утворений наступними каскадами; -попередній підсилювач вертикального наведення П-ВН (плата А5);
- 5. 388 - перетворювач напруги ПН (плата А6); - імпульсний підсилювач П Імп (плата А4); - інтегратор компенсатора статичної помилки Інт. КСП (плата А1); Електрогідравлічний привод гармати у вертикальній площині, до складу якого входять: - установка живлення (УЖ). Вона включає в себе насос гідравлічний НГ постійної потужності з приводним електро двигуномнасоса ПДНта компенсатором Ком. зміни об’єму гідрорідини; - виконавчий циліндр ЦВ. До складу ЦВ входить золотниковий регулятор РЗ з електромагнітом управління ЕМУ, гідродвигун зворотно-поступальної дії ЦВ та два електромагніти клапанів гідростопоріння ЕМгс; 3.3.2. Особливості роботи стабілізатора 2Е42-2 в основних режимах Об’єктом регулювання ОР в цій системі (додаток 3) є гармата Г, а величинами, що регулюються – кут підвищення гармати та її кутова швидкість Ωг. Вимірювачем відхилення гармати від заданого наводкою значення з є триступеневий гіроскоп Гр ДК-ВН СЛП. Принцип дії стабілізатора в режимі стабілізації полягає в наступному. При русі танка по пересіченій місцевості гармата відхиляється від заданого напрямку. В статорній обмотці ОТ ГДК-ВН з’являється ЕРС, величина якої пропорційна куту відхилення гармати, а її фаза визначається напрямком відхилення. З ОТ ГТ-ВН знімається сигнал, який пропорційний швидкості відхилення гармати, а фаза визначається напрямом швидкості відхилення гармати. Сигнали з ОТ ДК-ВН та ГН-ВН поступають на вхід П-ВН (А5), де відбувається їх фазочутливе виправлення, підсилення та підсумовування в електронному суматорі з сигналами від інтегратора-компенсатора статичної
- 6. 389 помилки. Частина сигналу з ДК-ВН після ФЧВ проходить через диференціатор ДИФ у П-ВН для покращення якості регулювання. У перетворювачі напруги ПН відбувається підсумування основного сигналу управління вертикального наведення із сигналом зворотного зв’язку Демпф ВН. Після цього підсилений та скоректований сигнал подається на вхід імпульсного підсилювача Пімп (А4), де відбувається широтно-імпульсне перетворення сигнала та підсилення його по потужності з подальшим поданням його у вигляді різниці струмів ∆І= І1-І2 в обмотки електромагніту управління ЕМУ циліндра виконавчого ЦВ. У відповідності до полярності сигналу управління ЕМУ оказує дію на регулятор золотниковий (РЗ) ЦВ. Потік робочої рідини від НГ перерозподіляється РЗ між порожниною злива та порожнинами ЦВ. Внаслідок цього в порожнинах ЦВ утворюється різниця тисків ∆P, що спричиняє переміщення штоку ЦВ та отримання стабілізуючого моменту Мст, останній на вісі цапф гармати. Мст протидіє зовнішньому моментузбурення Мзб і, таким чином, значно знижує результуючий момент Мг=Мзб-Мстякий діє на гармату при русі танку. Внаслідок цього величина відхилення гармати ∆φг від заданого кута підвищення φз також значно зменшується. При повертанні гармати у вихідне положення напруга в статерній обмотці ОТ ДК-ВН зменшується. Відповідно зменшиться і різниця струмів ∆І в обмотках ЕМП і, як наслідок, зменшиться момент Мст, що діє на ОР. Обмежувач кутів переміщення гармати складається із чотирьох контактів ОГ-КН1, ОГ-КН2 і ОГ-КН3, ОГ-КН4. ОГ-КН3, ОГ-КН4 забезпечує часткове розвантаження електродвигуна УЖ, коли ГТ знаходиться на упорі, а лінія візірування – за упором. ОГ-КН1, ОГ-КН2 сумісно з ГТ-ВН забезпечують спрацюванння електричного кола електромагнитів гідростопоіння гармати при її відскокох від упора зі швидкістю 7,5-8,5º Для наведення гармати на ціль навідник повертає рукоятки ПУ. Робота схеми стабілізації в цьому режимі аналогічна. При наведенні гармати за допомогою ПУ на ціль одночасно з прецесією зовнішньої рамки гіроскопа
- 7. 390 обертається як шків стрічково-важільної передачі (СВП) так і ротор ОТ, які закріплені на піввісях ЗРГ. Внаслідок цього в статерній обмотці ОТ з’являється сигнал, еквівалентний куту непогодження між положенням лінії візірування у вертикальній площині та віссю гармати. Після перетворення та підсилення в блоці БУ-К1 цей сигнал надходить на гідропривод гармати, який, відпрацьовуючи його, повертає гармату в узгоджене положення з лінією візірування з точністю ∆φг. Приведення гармати до кута заряджання При роботі автомата заряджання (АЗ) гармату необхідно із стабілізованого положення приводити до кута заряджання. Сигнал управління для стабілізатора гармати про переміщення її на кут заряджання надходить з приладу приведення ПП, який через сектор гармати і шестерню механічно зв’язаний з гарматою та отримує мінусовий потенціал з БУ А3 після натискання кнопки МЗ на пульті прицілу. Сигнал надходить через контакти БР2-К1 до електромагніту управління ЕМУ виконавчого циліндра ЦВ після відключення виходу з підсилювачаімпульсного. При підході гармати до зони кута заряджання з приладу приведення надходить сигнал на електромагніти клапанів гідростопоріння ЕМгс для постановки гармати на гідро стопор. Компенсатор статичної помилки За узгодженням вісі каналу ствола та лінії прицілювання «слідкують» контакти компенсатора КК в ДК-ВН. При виникненні статичної помилки між лінією прицілювання та віссю каналу ствола гармати КК видають про це інформацію до інтегратора статичної помилки Інт. КСП (А1). В інтеграторі автоматично виробляється сигнал на компенсацію отриманої статичної помилки. Для контролю режиму роботи інтегратора в блоці управління є світлодіод СТОП. При блокіровках КСП відключається, а світлодіод світиться.
- 8. 391 Цілевказання від командира танку При управління приводом башти командир працює на приладах цілевказання, які подають електричний сигнал на електромагніт кардана ЕМК для стопоріння башенки командира на корпус танка та на інтеграторрежиму НАПІВАВТОМАТ НА та ПЦ. В подальшому використовуються електричні ланцюги НА та ПЦ, електронних ПГН і Пімп, в яких сигнал підсилюється та надходить до ЕМПр. Башта з перекидочною швидкістю починає обертатися у напрямку, який визначено приладом цілевказання. Аварійний поворот башти від механіка-водія При аварійному повороті башти механік-водій натискає вимикач МВ-Т на розподільчому щитку у відділені управління. При цьому спрацьовує група реле механіка-водія РМВ і сигнал управління через транзисторний підсилювач потужності подається на обмотку ЕМП-ОУ1. ЕМП видає робочу напругу такої потужності, що ВД обертає башту тільки ліворуч з перекидочною швидкістю.