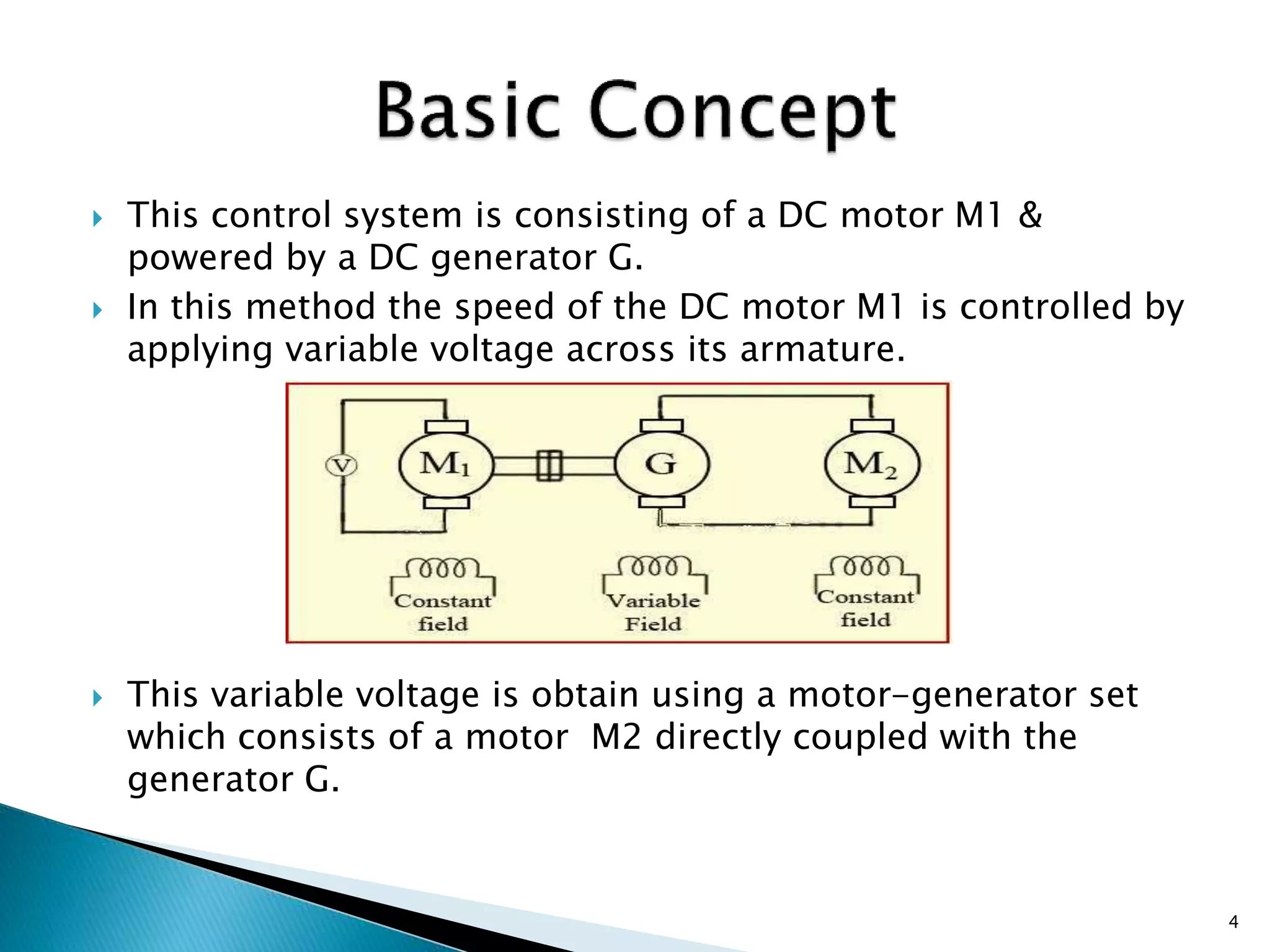
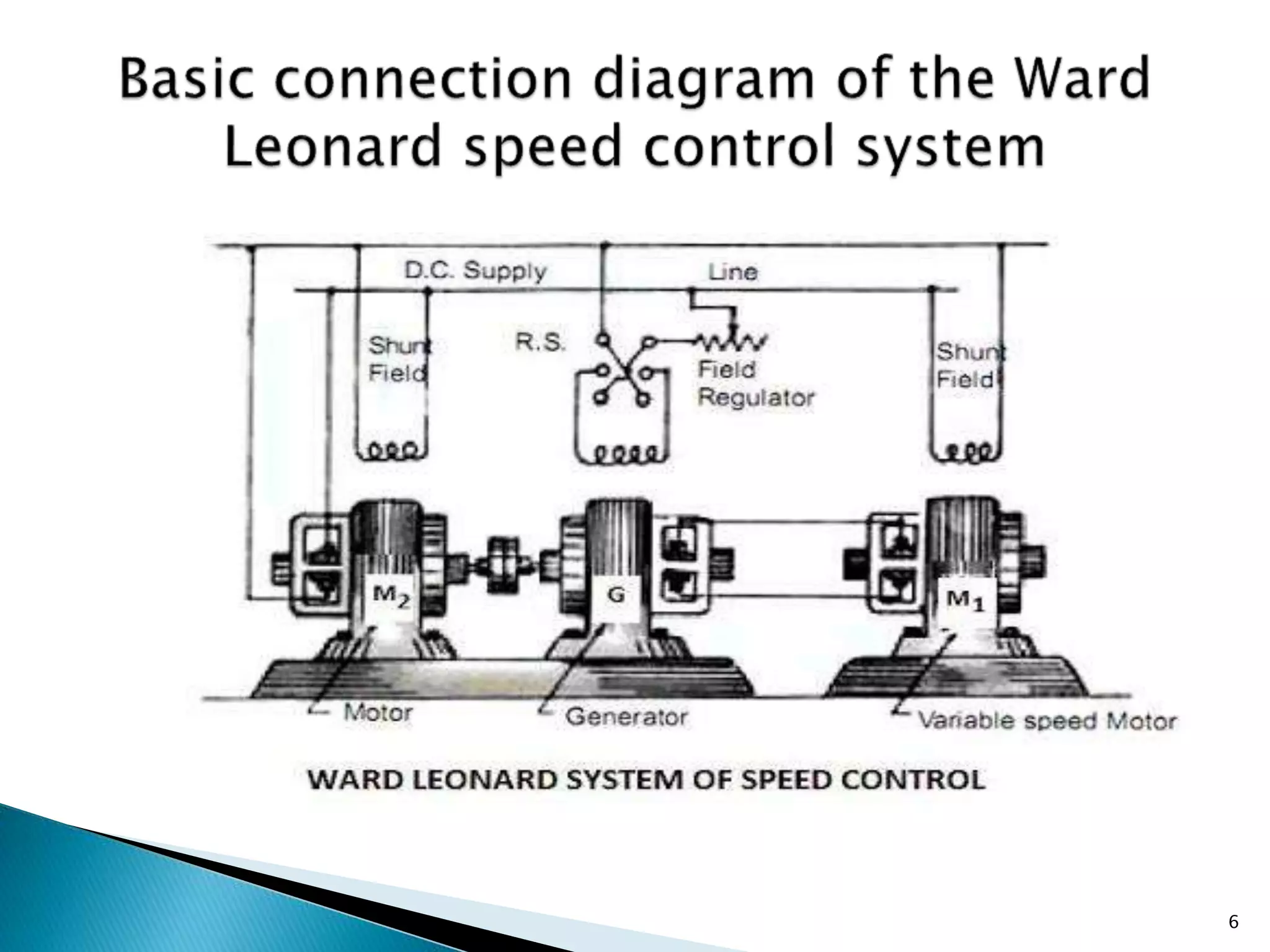
The document discusses the Ward Leonard method for controlling the speed of a DC motor, introduced by Harry Ward Leonard in 1891. It describes the system's operation involving a motor-generator set, its advantages such as smooth speed control and regenerative braking, and disadvantages including high cost and maintenance needs. Applications of this method include colliery winders, cranes, and elevators.