Download to read offline
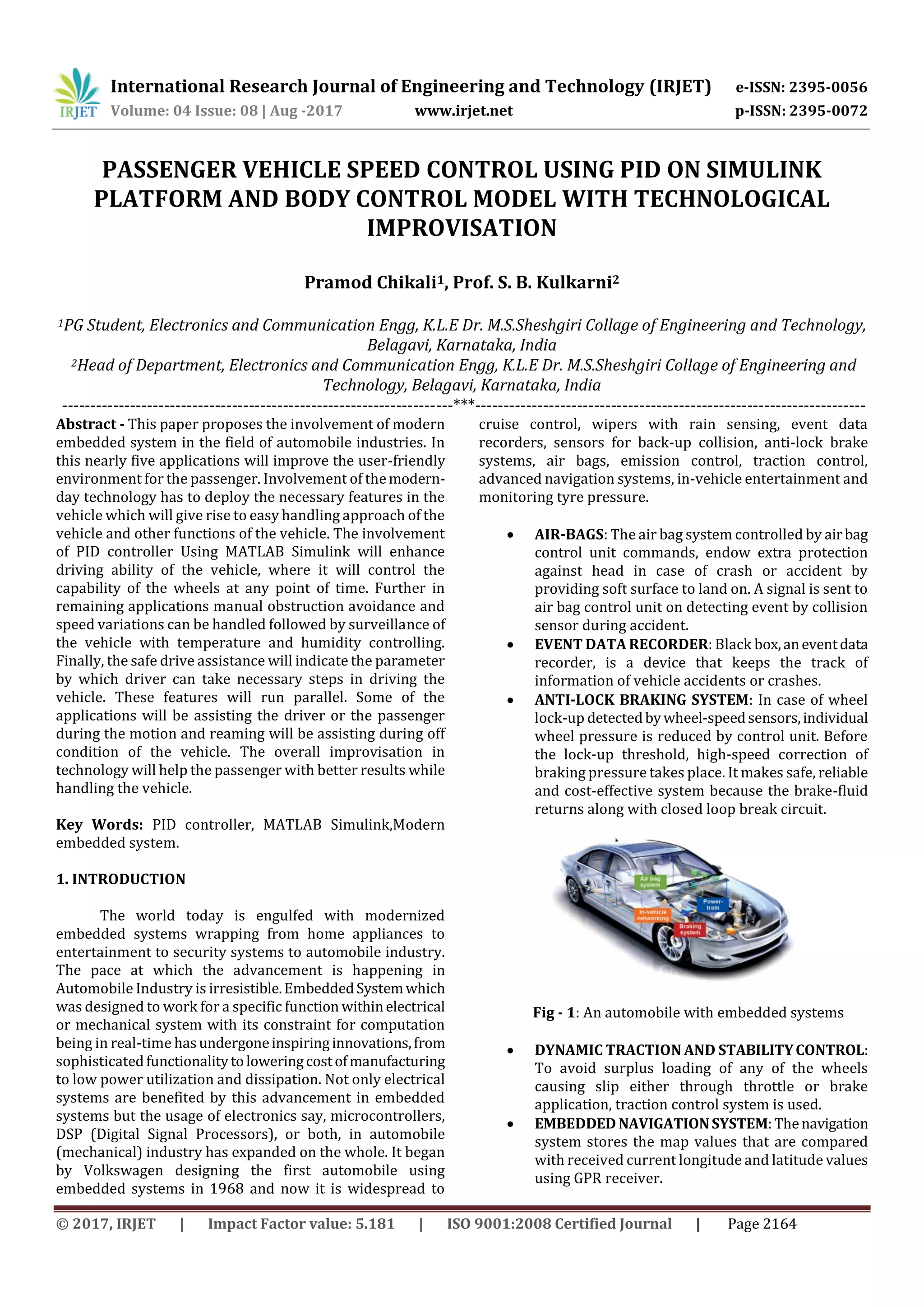
![International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 04 Issue: 08 | Aug -2017 www.irjet.net p-ISSN: 2395-0072
© 2017, IRJET | Impact Factor value: 5.181 | ISO 9001:2008 Certified Journal | Page 2167
Consider the fourth application.
Fig- 7: Graphical representations of Humidity and
Temperature on Thinspeack platform
The above representation is for the Passengervehicle
interior humidity and temperature monitoring withIOTand
to maintain onboard temperature with air coolant system.
Consider the final application.
Fig-8: Safe drive assistance Indications on LCD
Fig-9: Safe drive assistance Indications on LCD
The above representation is for the Safe drive
assistance, where the results are displayed on the 16*2 LCD
display.
4. CONCLUSION AND FUTURE SCOPE
In accordance with the objectives of this project as
mentioned earlier in this report asapplications,therequired
results are obtained.
First application i.e. Drive with PID control with
simulation result obtained and real-time
implementation is done.
Second application is related to Mechanized speed
control of passenger vehicle, the speed variation
and controlling acquired with ideal results.
Third application is related to Vehicle surveillance
camera for object detection using raspicam and
Android application, in which video and images
have the clear visibility to recognize the objects
using IOT application.
Fourth application is related to Passenger vehicle
interior humidity and temperaturemonitoring with
IOT and to maintain onboard temperature with air
coolant system, in this application parameters
involving with IOT are acquired with the ideal
results and represented them on the graphical
platform using Thingspeack.
Fifth application is related Safe drive assistance in
which using moisture content reader, the alert
messages are obtained based on the parameter
variations. Finally, to alert the driver.
The involvement of embedded systems in the field of
automobile systems will create a great impact in future
technology improvisations. As the electronic control unit
moderates, number sensors and actuators will be increased.
So that Automatic and smart way approach of the system
will have great reliability and accuracy.
REFERENCES
[1].https://en.wikipedia.org/wiki/PID_controller.
[2].Nawi Berahim, Sulaini Besar, Mohd Zain Abdul Rahim,
Shamsul Aizam Zulkifli, Zairi Ismael Rizman,” PID Voltage
Control For DC Motor Using MATLAB Simulink and Arduino
Microcontroller ”. ISSN: 2090-4274 Journal of Applied
Environmental and Biological Sciences.
[3].Ashish U. Bokade and V. R. Ratnaparkhe ,” Video
SurveillanceRobotControl usingSmartphoneandRaspberry
Pi ”. International Conference on Communication and Signal
Processing, April 6-8, 2016, India.
[4].Ravi Kishore Kodali and Archana Sahu,” An IoT based
Weather Information Prototype Using WeMos ”. 2016 2nd
International Conference on Contemporary Computing and
Informatics.
[5].https://www.raspberrypi.org/.](https://image.slidesharecdn.com/irjet-v4i8389-170926091533/75/Passenger-Vehicle-Speed-Control-using-PID-on-Simulink-Platform-and-Body-Control-Model-with-Technological-Improvisation-4-2048.jpg)
![International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 04 Issue: 08 | Aug -2017 www.irjet.net p-ISSN: 2395-0072
© 2017, IRJET | Impact Factor value: 5.181 | ISO 9001:2008 Certified Journal | Page 2168
[6].https://www.arduino.cc/.
[7].https://thingspeak.com/.
[8].https://in.mathworks.com/help/supportpkg/arduino/ex
amples/drive-with-pid-
control.html?prodcode=SL&requestedDomain=www.mathw
orks.com.
[9].https://electronicsforu.com/electronics-
projects/surveillance-camera-using-raspicam-android-app.
[10].https://electronicsforu.com/electronics-
projects/humidity-temperature-monitoring-using-arduino-
iot.
[11].https://electronicsforu.com/electronics-
projects/hardware-diy/diy-digital-soil-moisture-meter.](https://image.slidesharecdn.com/irjet-v4i8389-170926091533/75/Passenger-Vehicle-Speed-Control-using-PID-on-Simulink-Platform-and-Body-Control-Model-with-Technological-Improvisation-5-2048.jpg)

This document summarizes a research paper that proposes improvements to passenger vehicle technology using modern embedded systems. It describes five applications: 1) Using a PID controller in MATLAB Simulink to control vehicle speed, 2) Adding obstacle detection and automated speed variation, 3) Adding vehicle surveillance using a Raspberry Pi camera, 4) Monitoring interior temperature and humidity using IoT, and 5) Adding a moisture sensor for safe driving assistance. The results of each application are discussed and figures are provided to illustrate simulations and setups. In conclusion, incorporating embedded systems can significantly enhance vehicle functionality, automation, safety, and driving ability.