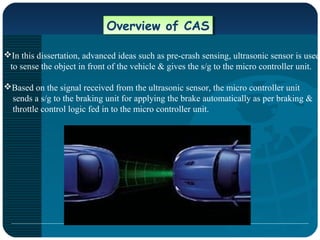
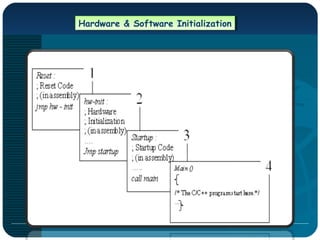
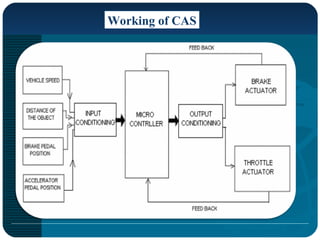
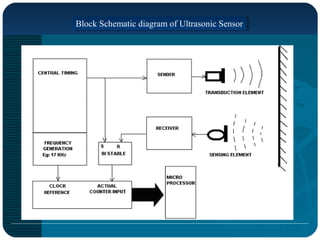
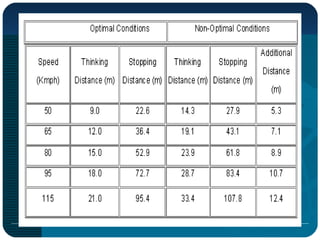
This document describes the design and implementation of a collision avoidance system for automobiles using an embedded system. It discusses the need for such a system to actively avoid accidents by using ultrasonic sensors to detect objects in front of the vehicle. When an object is detected, the microcontroller sends a signal to automatically apply the brakes based on a braking logic. It provides an overview of the embedded system components and describes the hardware initialization process. It also includes block diagrams of the ultrasonic sensor and discusses factors that affect stopping distances. The conclusion discusses the benefits of collision avoidance systems and potential future work.
![REFERENC
ES
S. M. Metev and V. P. Veiko, Laser Assisted Microtechnology, 2nd ed., R. M. Osgood,
Jr.Ed. Berlin, Germany: Springer-Verlag, 1998.
J. Breckling, Ed., The Analysis of Directional Time Series: Applications to Wind Speed
and Direction, ser. Lecture Notes in Statistics. Berlin, Germany: Springer, 1989, vol. 61.
S. Zhang, C. Zhu, J. K. O. Sin, and P. K. T. Mok, “A novel ultrathin elevated channel
low-temperature polySi TFT,” IEEE Electron Device Lett., vol. 20, pp. 569–571,
Nov. 1999. (2002) The IEEE website. [Online].
Available: http://www.ieee.org/
M. Shell. (2002) IEEEtran homepage on CTAN. [Online].
Available: http://www.ctan.org/tex-archive/macros/latex/contrib/supported/IEEEtran/
FLEXChip Signal Processor (MC68175/D), Motorola, 1996.
(2002) The IEEE website. [Online]. Available: http://www.ieee.org/
M. Shell. (2002) IEEEtran homepage on CTAN. [Online].
Available: http://www.ctan.org/tex-archive/macros/latex/contrib/supported/IEEEtran/
FLEXChip Signal Processor (MC68175/D), Motorola, 1996.
“PDCA12-70 data sheet,” Opto Speed SA, Mezzovico, Switzerland.
R. E. Sorace, V. S. Reinhardt, and S. A. Vaughn, “High-speed digital-to-RF converter,”
U.S. Patent 5 668 842, Sept. 16, 1997.](https://image.slidesharecdn.com/2f8b9a03-3428-4b24-9409-20b2fe84eb83-160407151336/85/CAS-PRESENTATION1-14-320.jpg)