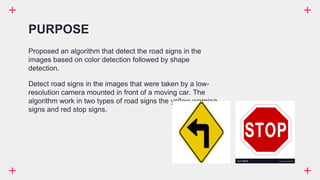
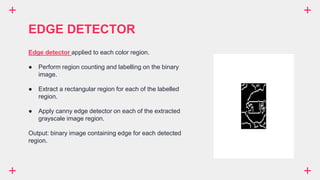
The document outlines an algorithm for traffic sign detection in images captured by a low-resolution camera on moving vehicles, focusing on color and shape detection for yellow warning and red stop signs. It describes the steps of color enhancement, color segmentation, edge detection, and Hough transform, along with experimental results that highlight the algorithm's accuracy and limitations, such as its sensitivity to background complexity and illumination conditions. Future work suggests employing machine-learning techniques to improve detection accuracy.




















![[G4]image deblurring, seeing the invisible](https://cdn.slidesharecdn.com/ss_thumbnails/g4imagedeblurringseeingtheinvisible-120919212040-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)































































