Lane Detection ForADAS
Applications
ECE 551 – IMAGE PROCESSING
Surya Teja Swamy
California State University Northridge
2.
Objective
Automotive industryis one of the growing industries and most of the
automotive companies are working on Autonomous Vehicle.
Lane detection is one of the important aspects of Advanced Driver Assistance
Systems (ADAS), which increases the scope of autonomous driving.
In ADAS applications, Lane detection can be achieved from various sensor
inputs, one such sensor that can be used is camera sensor.
When we use the camera output for the Lane Detection, then most of the
image processing techniques that we covered in class can be used.
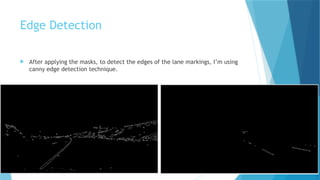
Edge Detection
Afterapplying the masks, to detect the edges of the lane markings, I’m using
canny edge detection technique.
6.
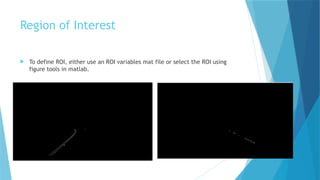
Region of Interest
To define ROI, either use an ROI variables mat file or select the ROI using
figure tools in matlab.
7.
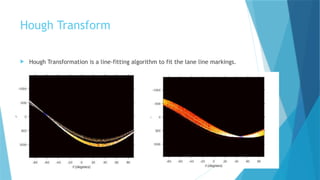
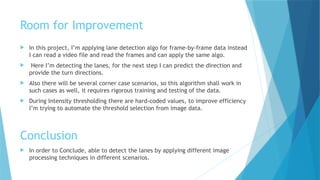
Hough Transform
HoughTransformation is a line-fitting algorithm to fit the lane line markings.
9.
Room for Improvement
In this project, I’m applying lane detection algo for frame-by-frame data instead
I can read a video file and read the frames and can apply the same algo.
Here I’m detecting the lanes, for the next step I can predict the direction and
provide the turn directions.
Also there will be several corner case scenarios, so this algorithm shall work in
such cases as well, it requires rigorous training and testing of the data.
During Intensity thresholding there are hard-coded values, to improve efficiency
I’m trying to automate the threshold selection from image data.
Conclusion
In order to Conclude, able to detect the lanes by applying different image
processing techniques in different scenarios.