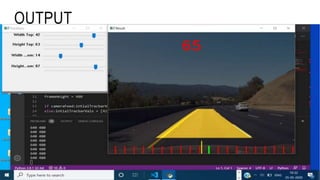
This document describes a lane detection software project using image processing to help drivers see lane lines in foggy conditions. The software uses the Hough transform algorithm to detect lanes by identifying lines of consistent color. It provides a real-time display of the lane boundaries and direction indicators to assist drivers. The project aims to decrease accidents caused by low visibility by enabling drivers to easily detect lanes even in foggy environments.