Downloaded 14 times

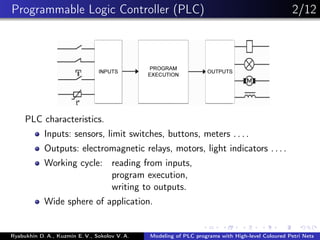
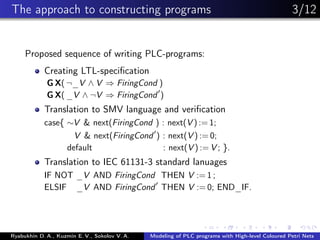
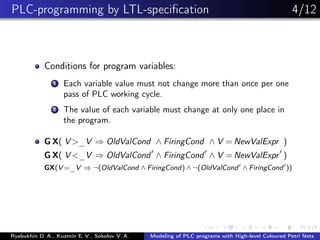
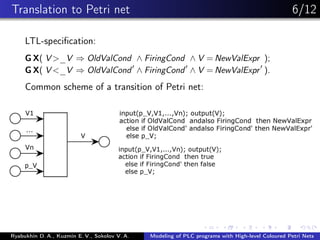
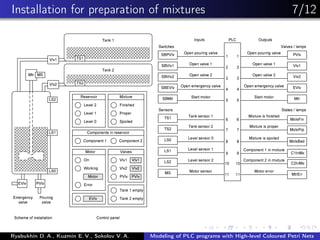
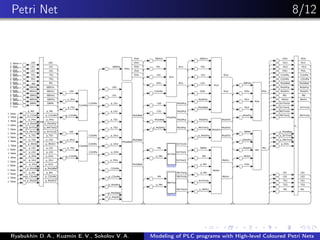


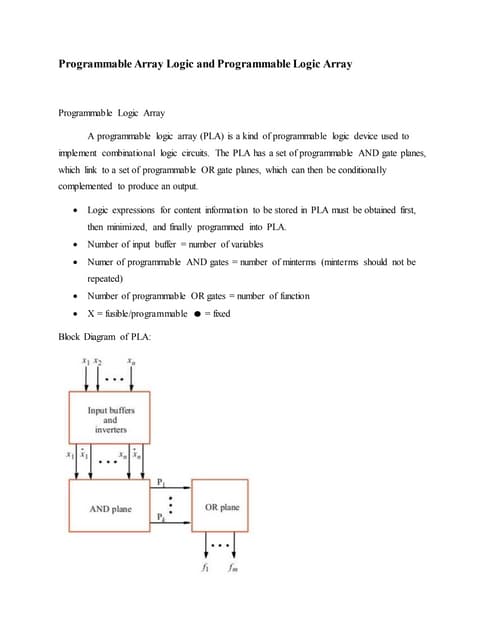
The document discusses the modeling of programmable logic controller (PLC) programs using high-level colored Petri nets, outlining input/output characteristics and program execution cycles. It presents a structured approach to writing PLC programs with LTL specifications, translation to SMV language, and verification processes. The authors emphasize the applicability of their approach to discrete logical control tasks, along with the ability to analyze behaviors and properties of PLC programs using CPN tools.