Downloaded 64 times














![7/24/2016 M Tech EXTC - Final Stage Seminar 76
References
[1] G. Meshram, Shubhangi Borkar, “Design and implementation of Robot
motion with IR wireless camera”, in International Journal on Recent and
Innovation Trends in Computing and Communication, Volume 3, Issue 2,
February 2015.
[2] Donato Di Paola, Annalisa Milella, Grazia Cicirelli and Arcangelo Distante,
“An autonomous mobile Robotic system for surveillance of indoor
environments”, International Journal of Advanced Robotic Systems, Vol. 7, No. 1
(2010).
[3] P. Vanitha Sri, S. Sharmila, K. Karthik, “A surveillance Robot for home
security with docking system”, in International Journal of Science, Engineering
and Technology Research (IJSETR) on, Volume 4, Issue 11, November 2015.](https://image.slidesharecdn.com/surveillanceandrescuerobotusingandroidsmartphoneand-160724073509/85/Surveillance-and-Rescue-Robot-using-Android-Smartphone-and-the-Internet-76-320.jpg)
![7/24/2016 M Tech EXTC - Final Stage Seminar 77
[4] Trupti B. Bhondve, Prof. R. Satyanarayan, Prof. Moresh Mukhedkar, “Mobile
rescue Robot for Human body detection in rescue operation of disaster”, in
International Journal of Advanced Research in Electrical, Electronics and
Instrumentation Engineering on, Vol. 3, Issue 6, June 2014.
[5] Maki K. Habib, Yvan Baudoin, “Robot-Assisted risky intervention search,
rescue and environmental surveillance”, in International Journal of Advanced
Robotic Systems on, Vol. 7, No.1, ISSN 1729-8806, pp. 098, March 2010.
[6] M.Balakrishnan, S.P.Jaya kumaran, S.Gowthaman, G.Rathana sabhapathy, “A
smart spy Robot charged and controlled by wireless systems”, in Innovations in
Information, Embedded and Communication Systems (ICIIECS), 2015
International Conference on, vol., no., pp.1-4, 19-20 March 2015.
[7] A.Sivasoundari, S.Kalaimani, M.Balamurugan, “Wireless surveillance Robot
with motion detection and live video transmission”, in International Journal of
Emerging Science and Engineering (IJESE), on Volume-I, Issue-6 April 2013.](https://image.slidesharecdn.com/surveillanceandrescuerobotusingandroidsmartphoneand-160724073509/85/Surveillance-and-Rescue-Robot-using-Android-Smartphone-and-the-Internet-77-320.jpg)


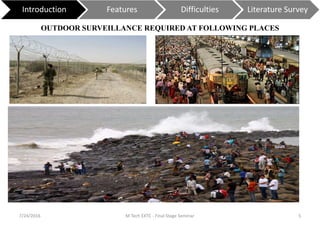
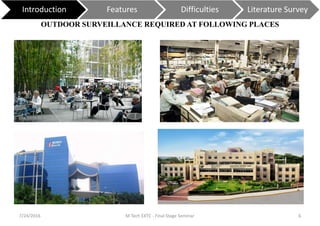
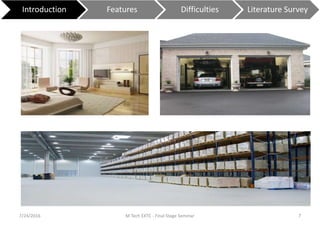
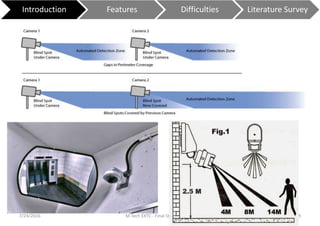
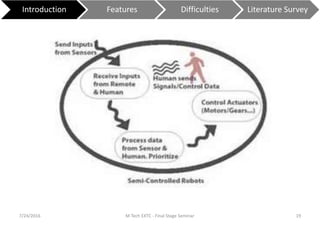
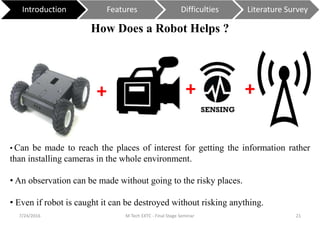
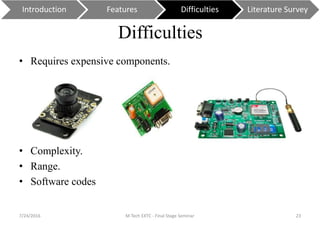
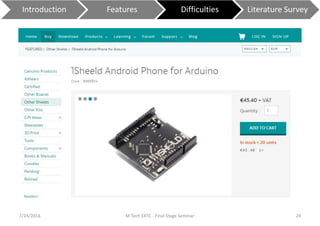
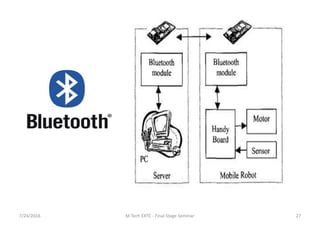
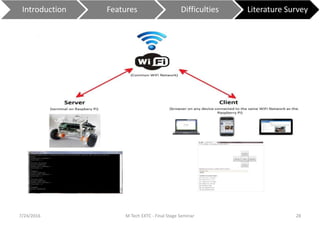
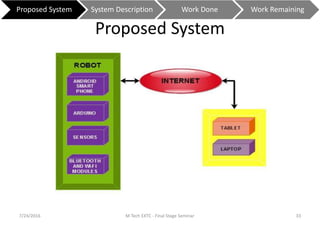
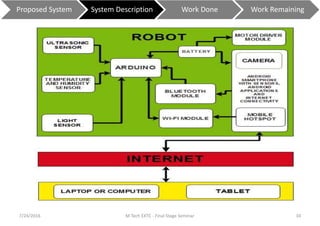
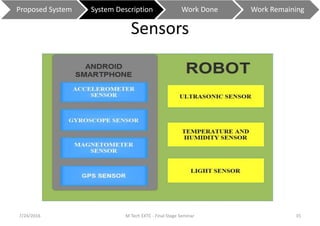
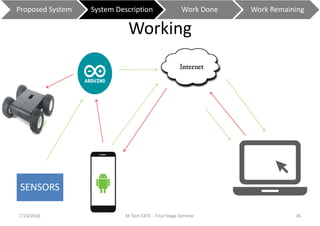
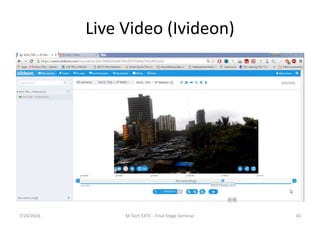
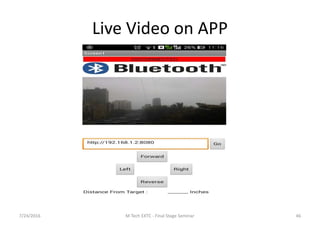
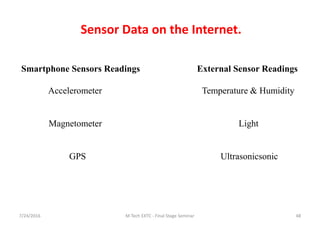
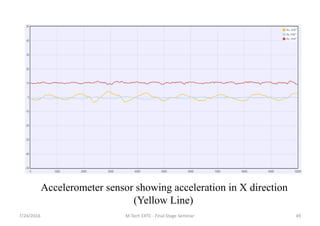
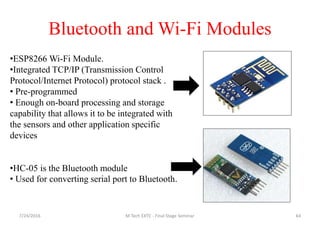
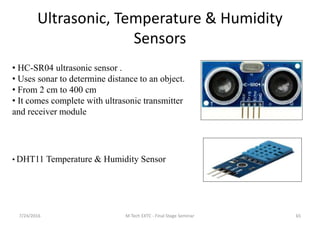
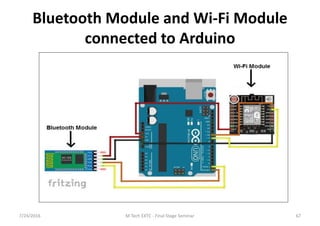
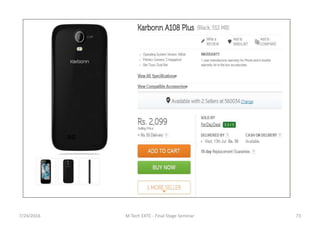
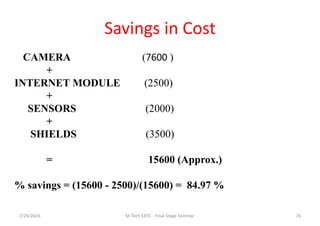
The document describes a proposed surveillance and rescue robot system using an Android smartphone and the internet. The system would allow a user to remotely control a robot equipped with sensors from a smartphone over WiFi or Bluetooth. This would provide live video streaming, environmental data from sensors, and control of the robot. The proposed system aims to make surveillance and rescue robots more affordable and accessible by using a smartphone instead of specialized expensive components. It could help with search and rescue operations in disasters and allow remote surveillance of areas that may be dangerous for humans to access.