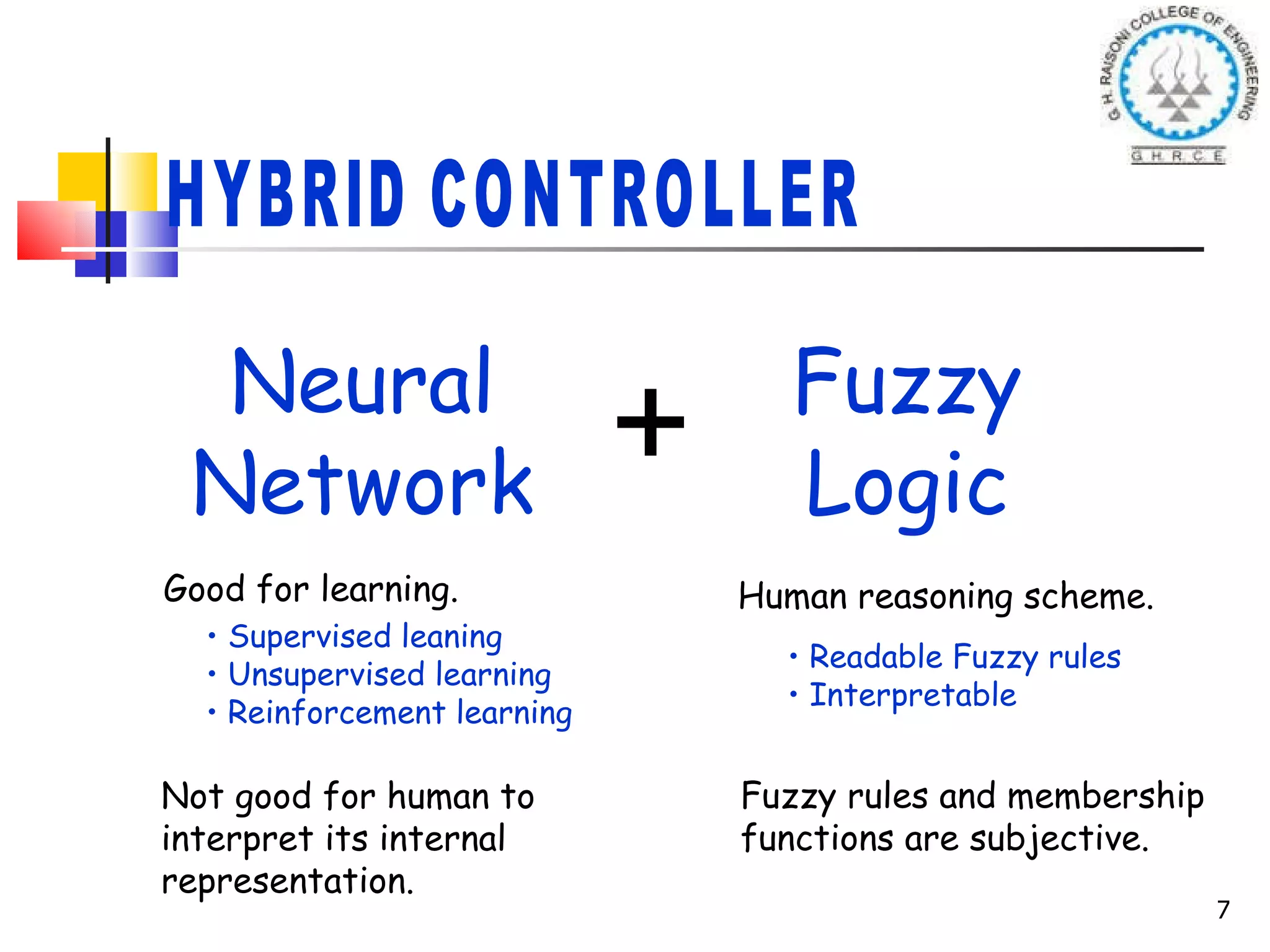
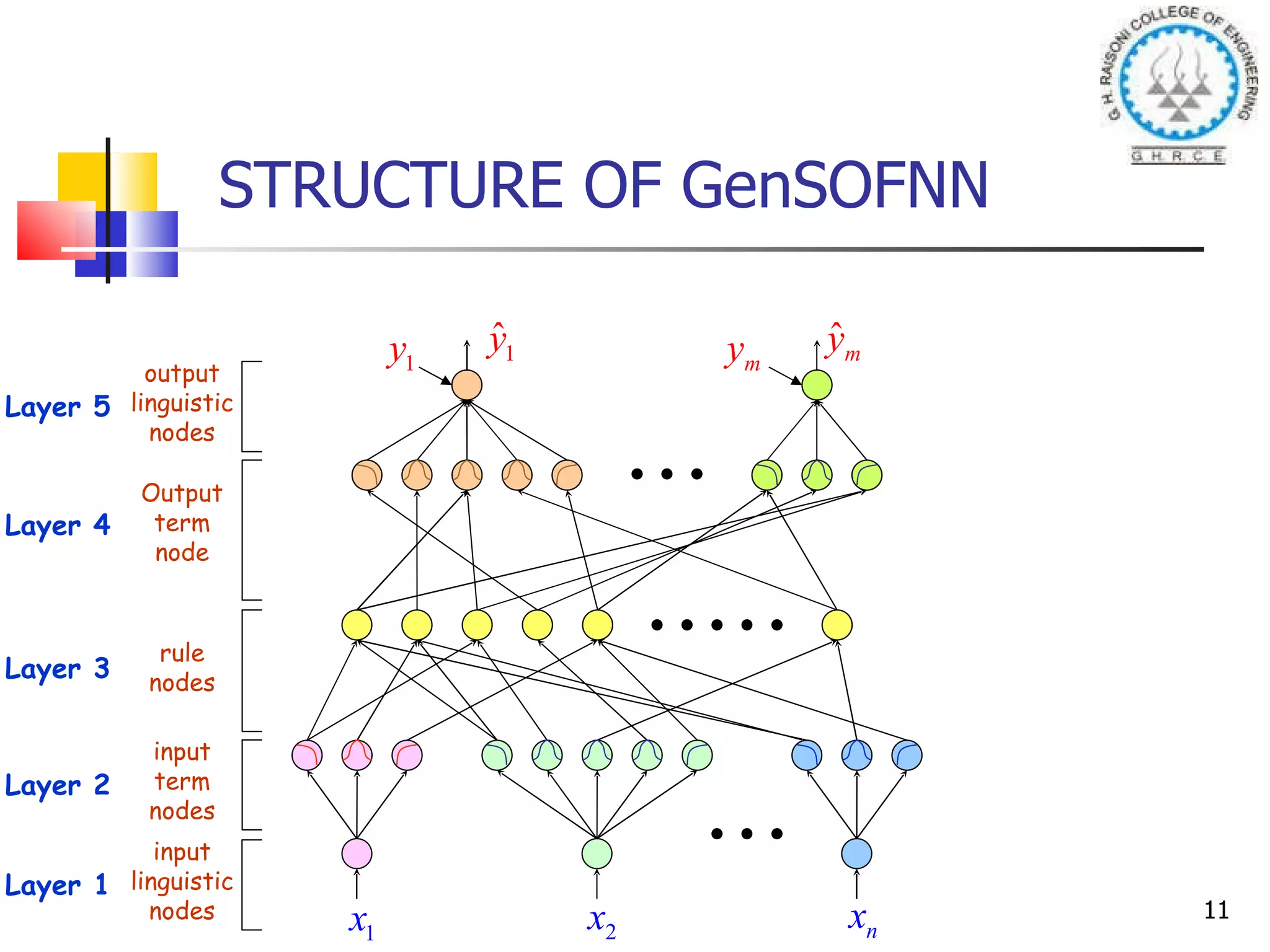
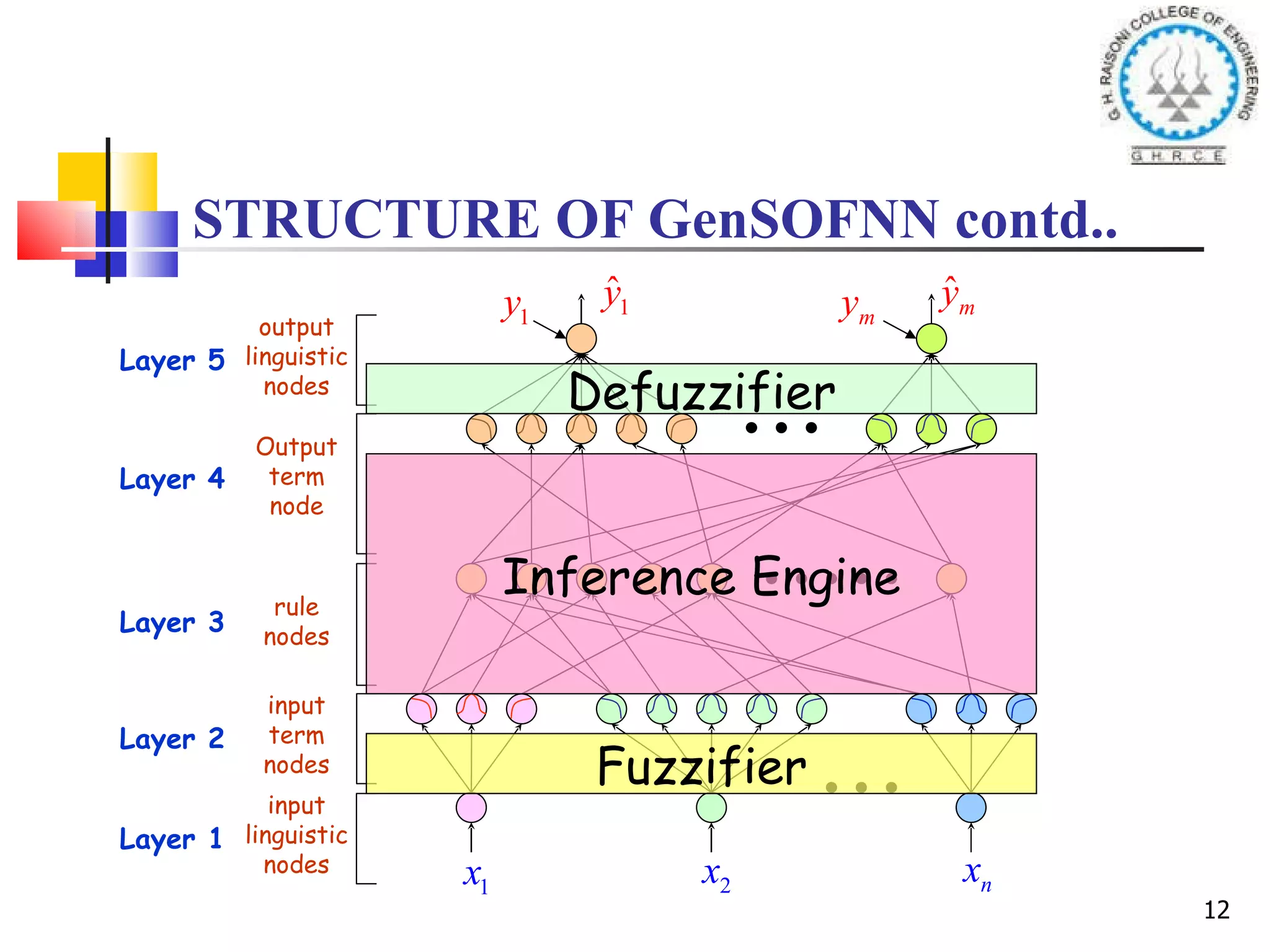
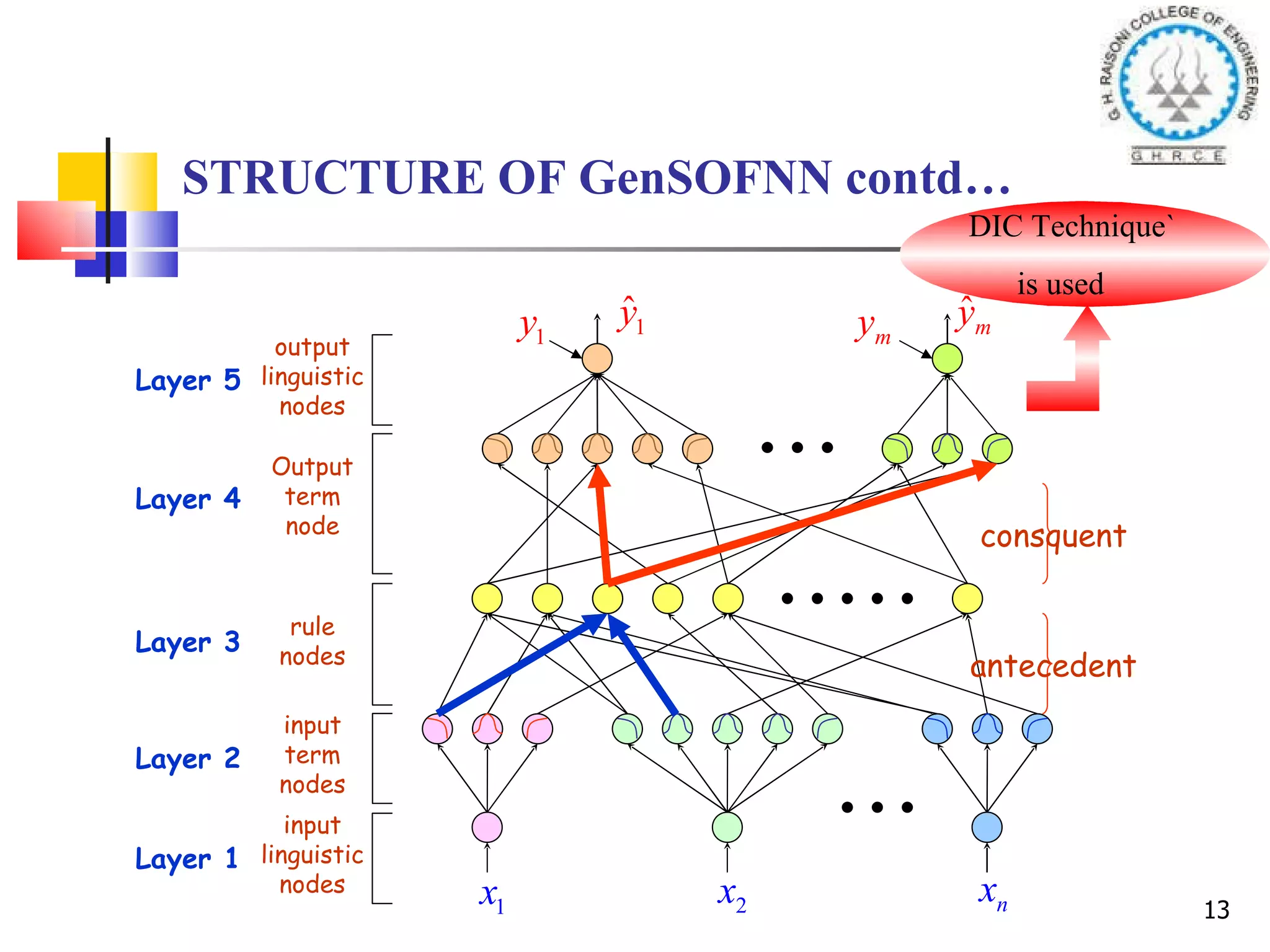
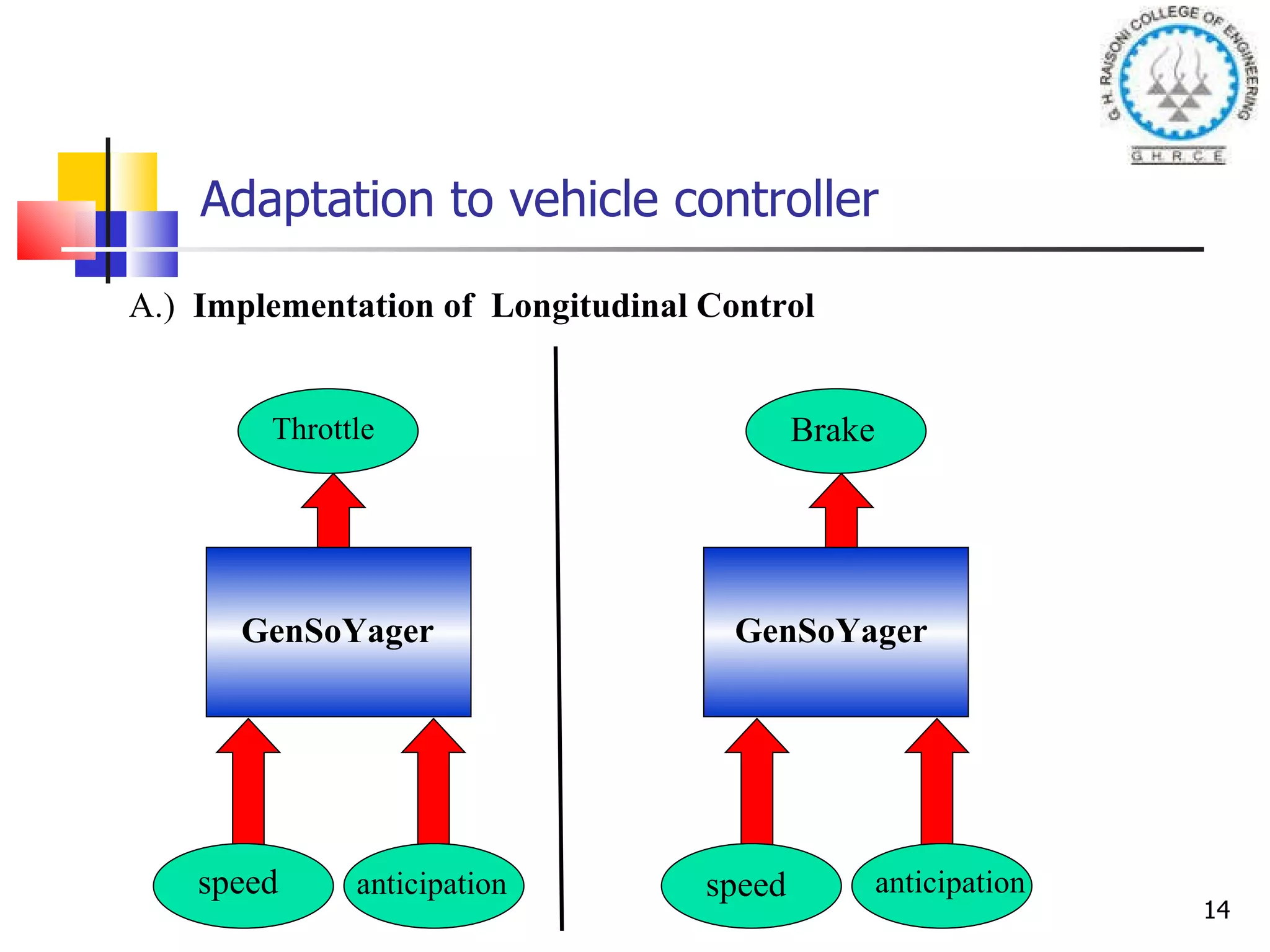
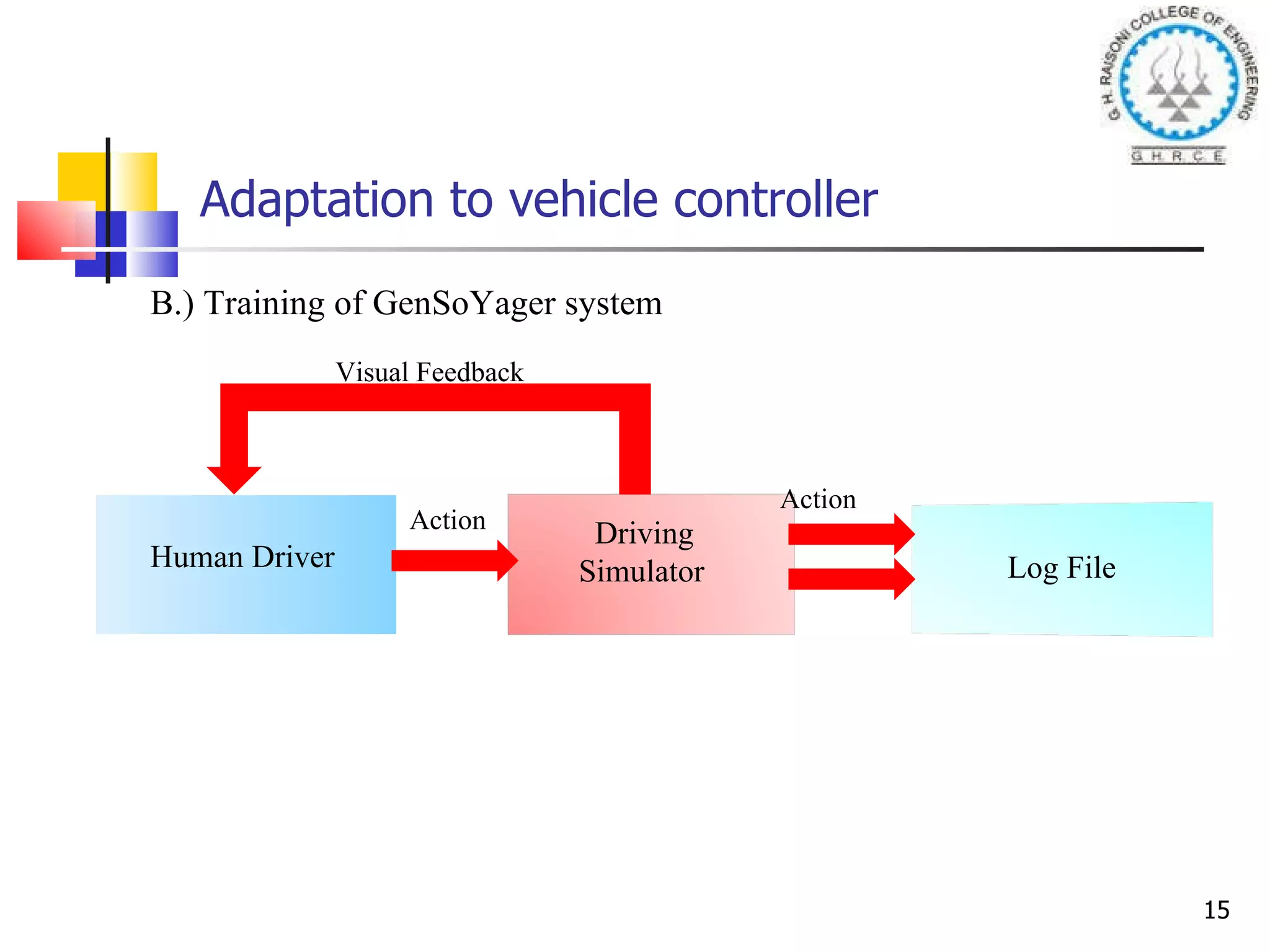
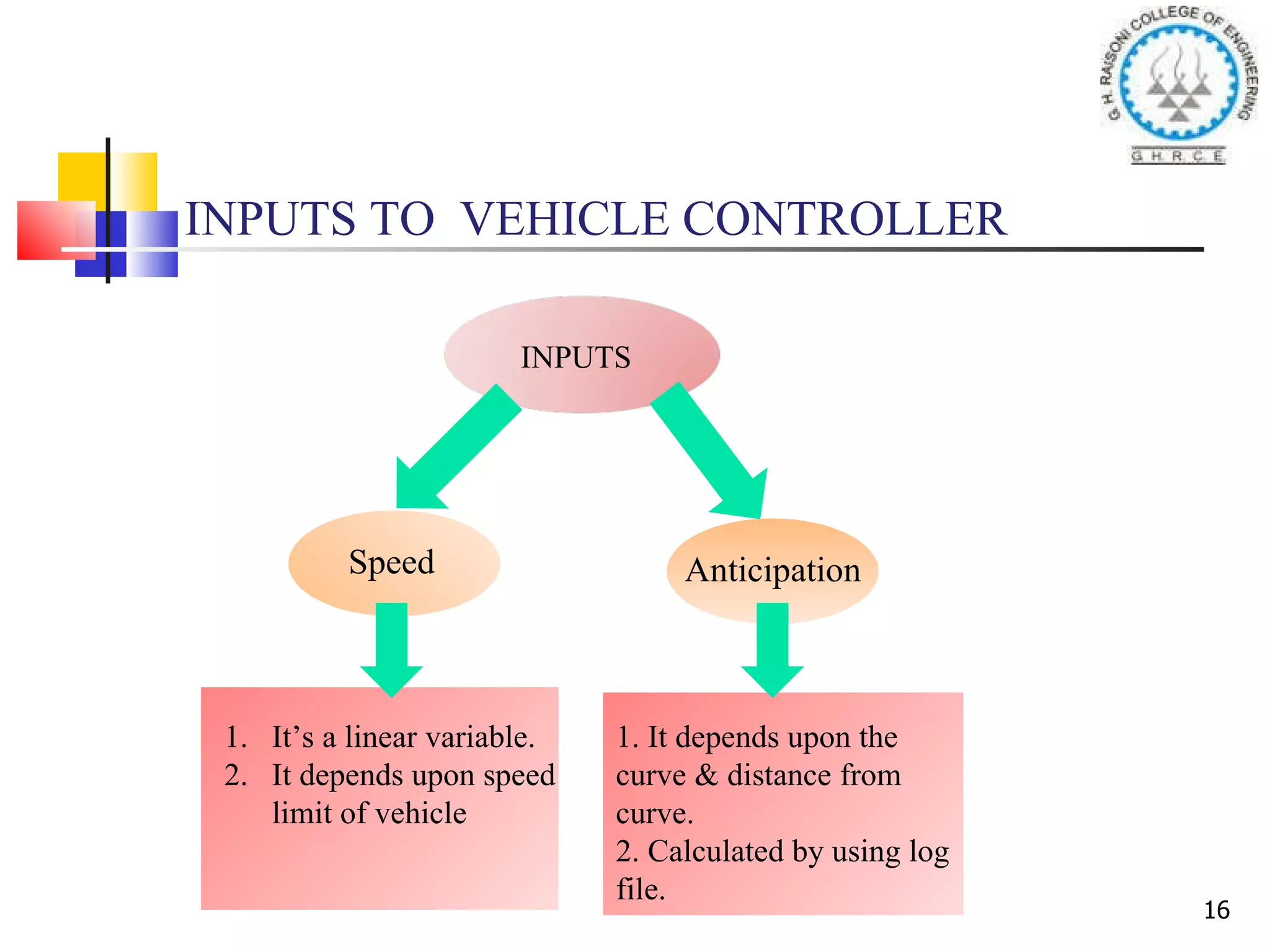
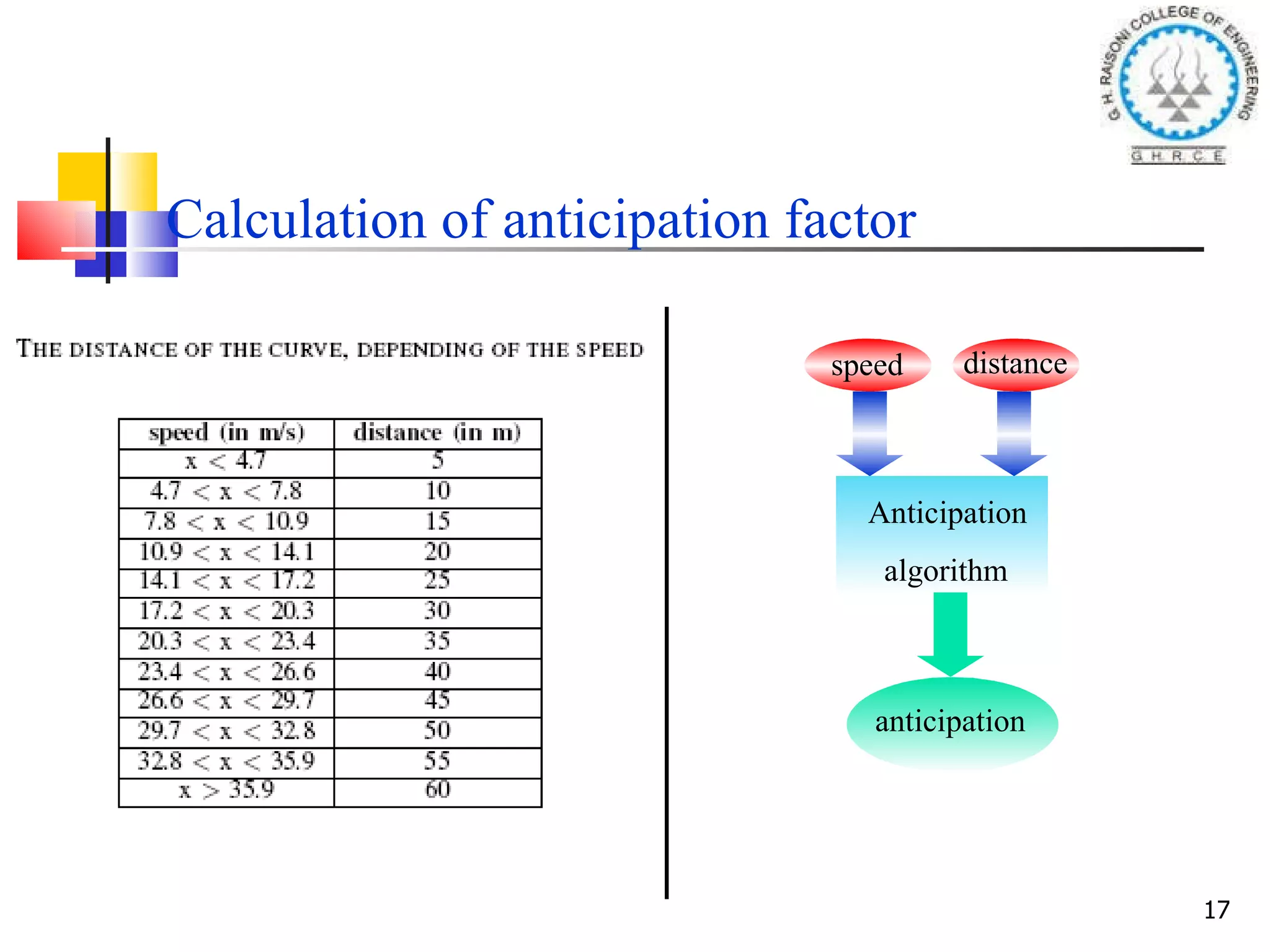
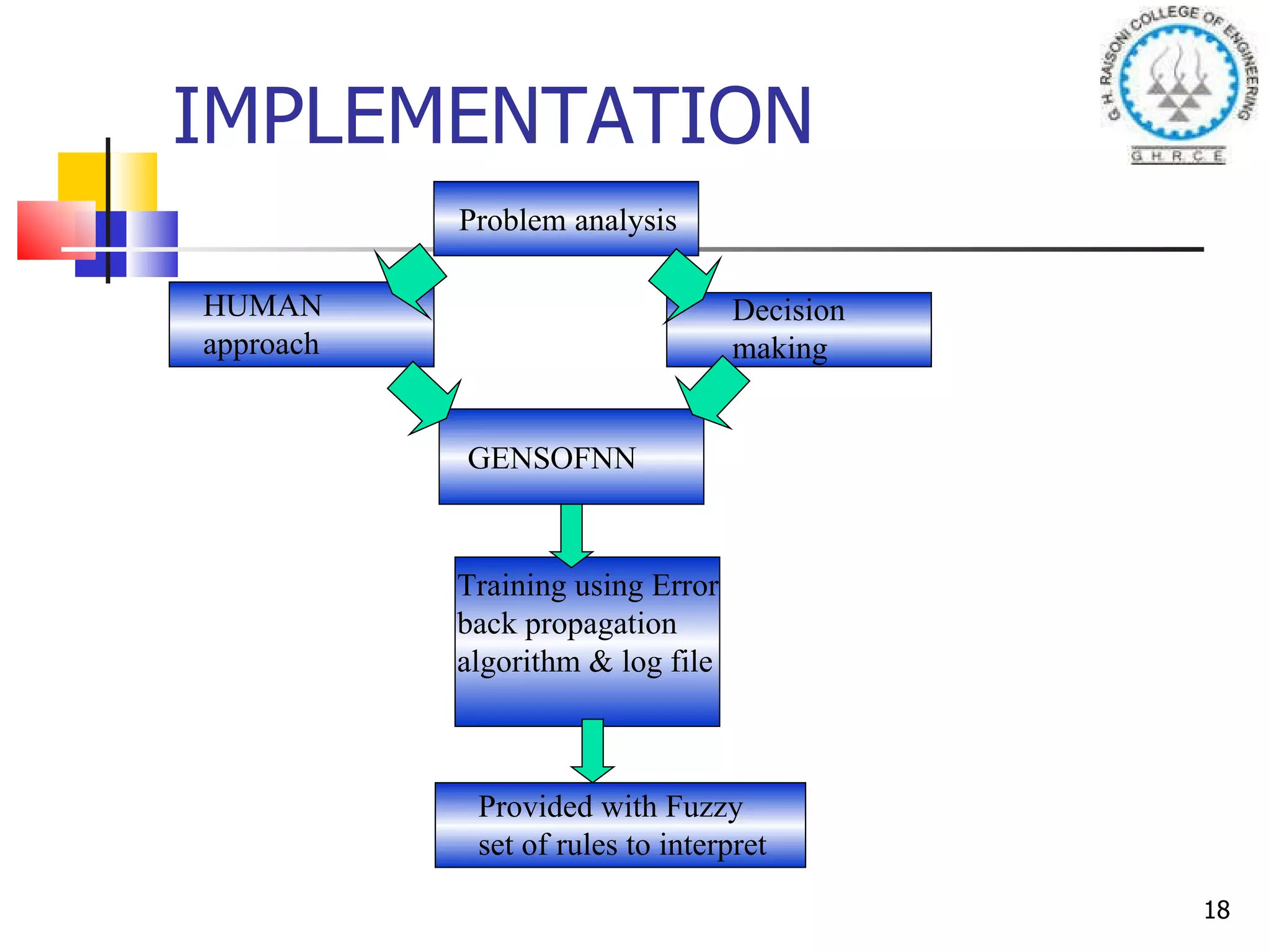
This project aims to design a hybrid neuro-fuzzy controller for longitudinal control of an automotive system to reduce road accidents caused by human error. The controller uses a generic self-organizing fuzzy-neural network (GenSOFNN) with Yager's inference scheme. It takes speed and anticipation as inputs and controls throttle and brake outputs. The system was trained using a driving simulator log file and aims to anticipate road conditions to improve safety.








































































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)









