Downloaded 67 times

![ Automation level ontology and situation assessment ontology are
designed for co-driving. [Pollard, 2013]
Use ontology and 14 SWRL rules to enable the vehicle to understand the
context information when it approaches road intersections. [Armand, 2014]
A complex intersection ontology (car, crossing, road connection, and sign
at crossing) is introduced for fast reasoning. [Hulsen, 2011]
An ontology-based traffic model that can represent typical traffic
scenarios such as intersections, multi-lane roads, opposing traffic, and bi-
directional lanes is introduced. [Regele,2008]
Related Work
4](https://image.slidesharecdn.com/swo2015-150414070104-conversion-gate01/85/Ontologies-for-Advanced-Driver-Assistance-Systems-4-320.jpg)
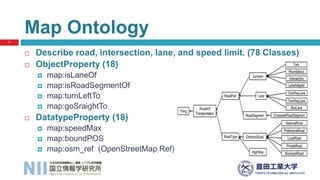
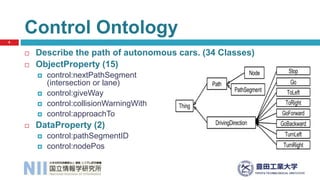
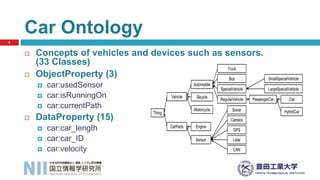
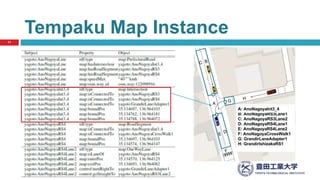
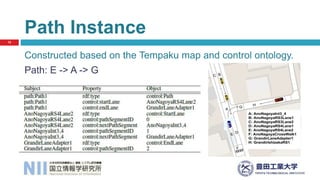
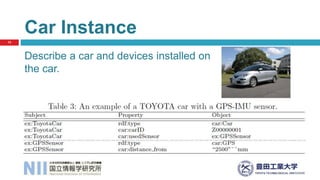
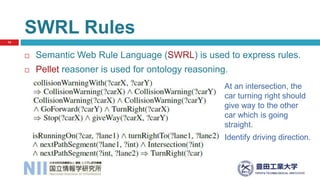
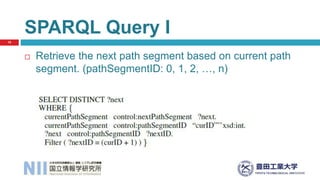
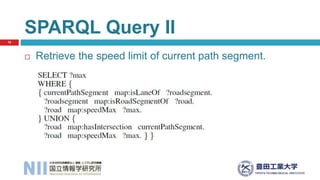
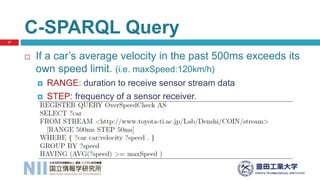
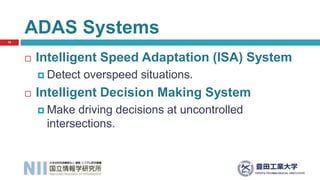
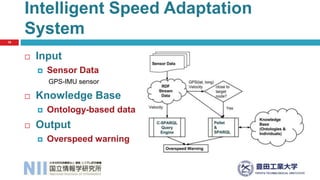
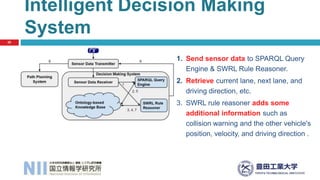
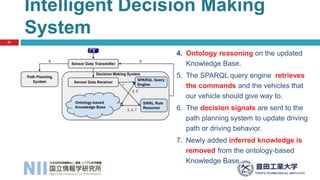
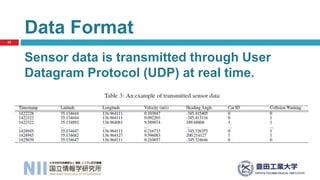
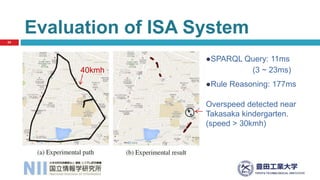
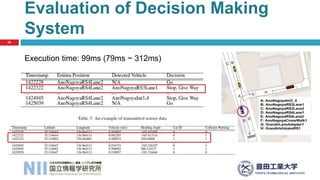

1) The document describes an ontology-based knowledge base that is used for advanced driver assistance systems. 2) Ontologies were designed for concepts like maps, vehicle control, and cars to represent the driving environment. 3) An intelligent speed adaptation system and intelligent decision making system were developed that use the knowledge base to detect overspeed situations and make decisions at intersections. 4) An experiment evaluated the systems using real sensor data and found that inferences were made within milliseconds.


















































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)
















