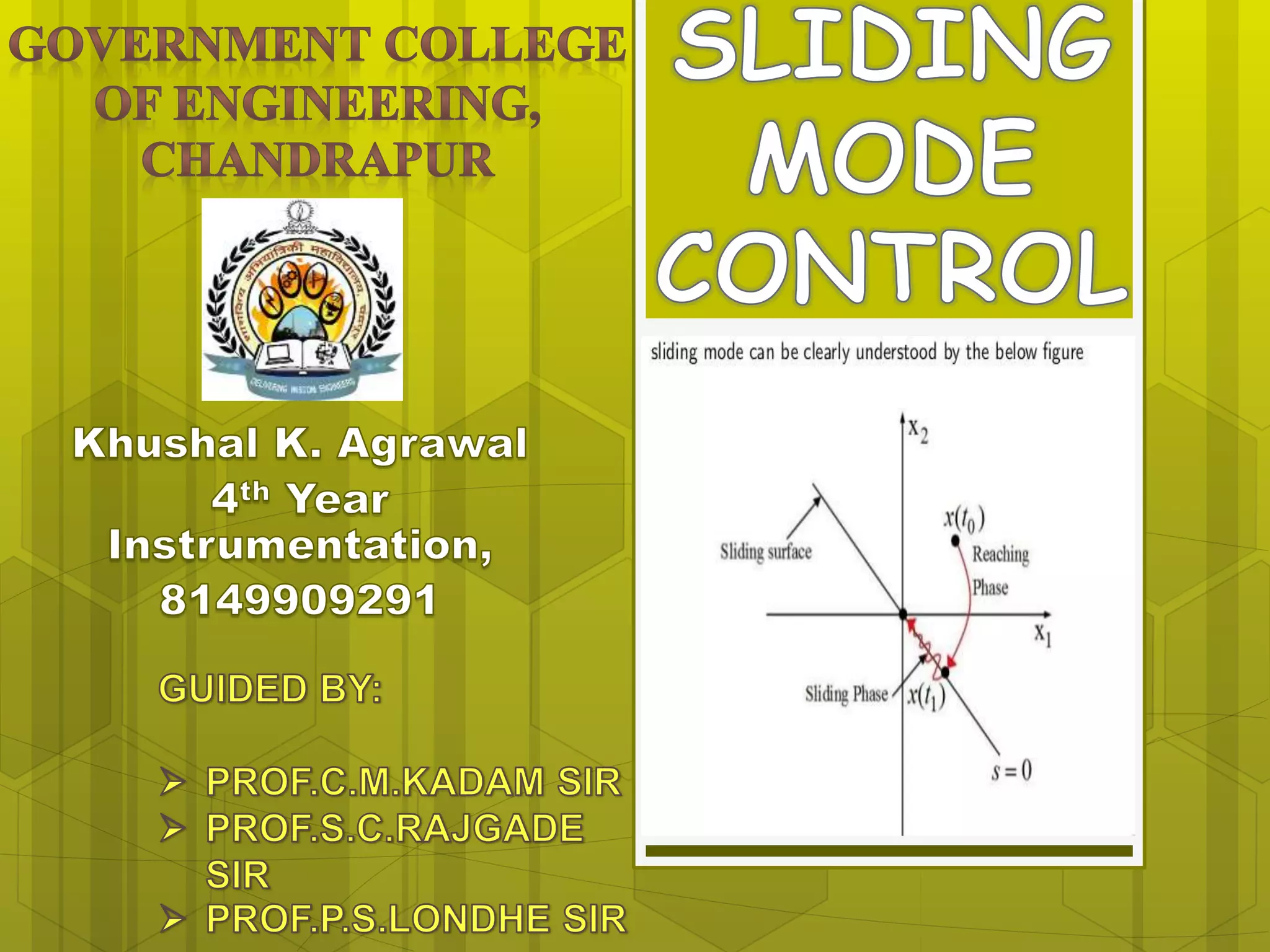
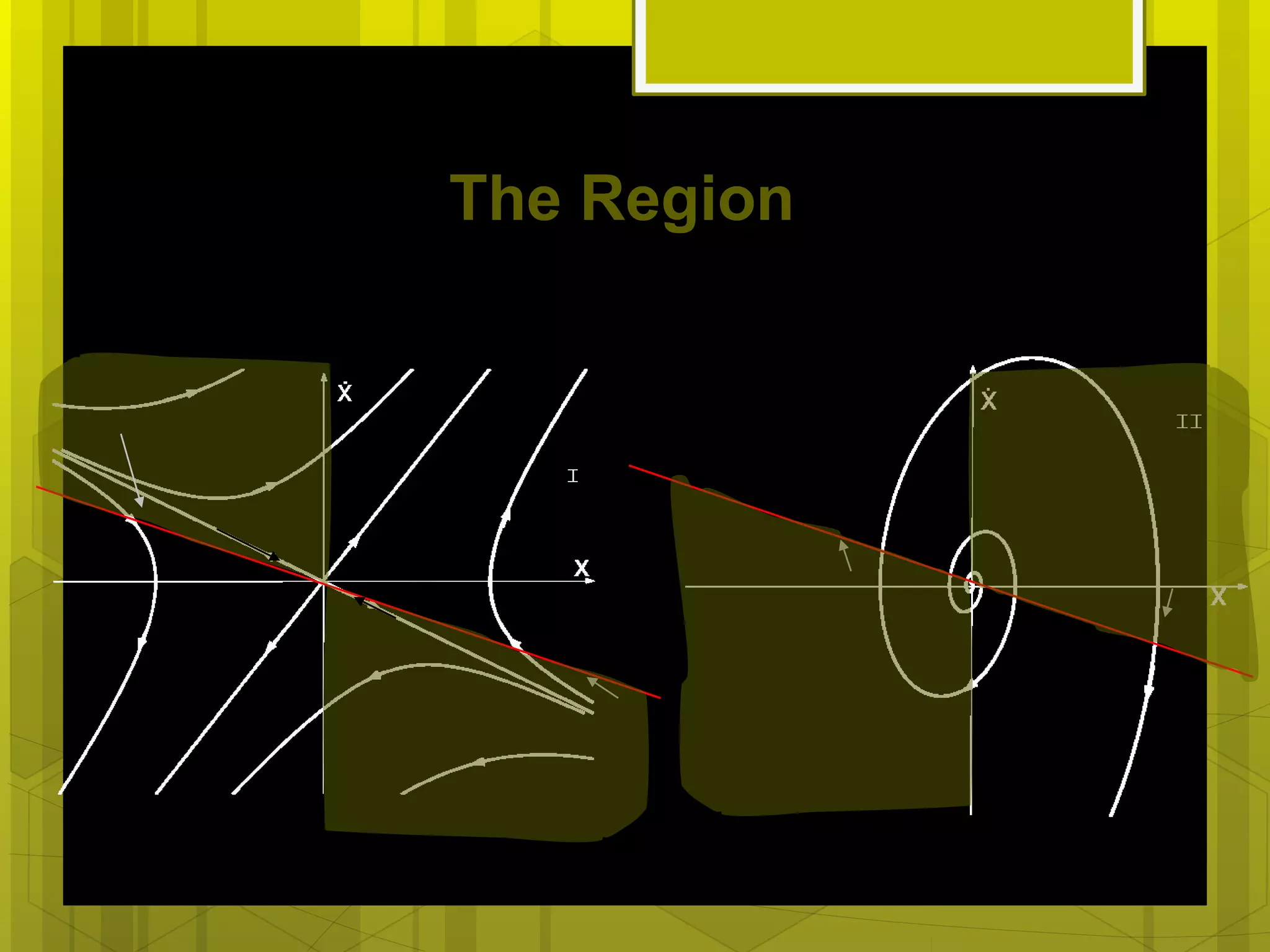
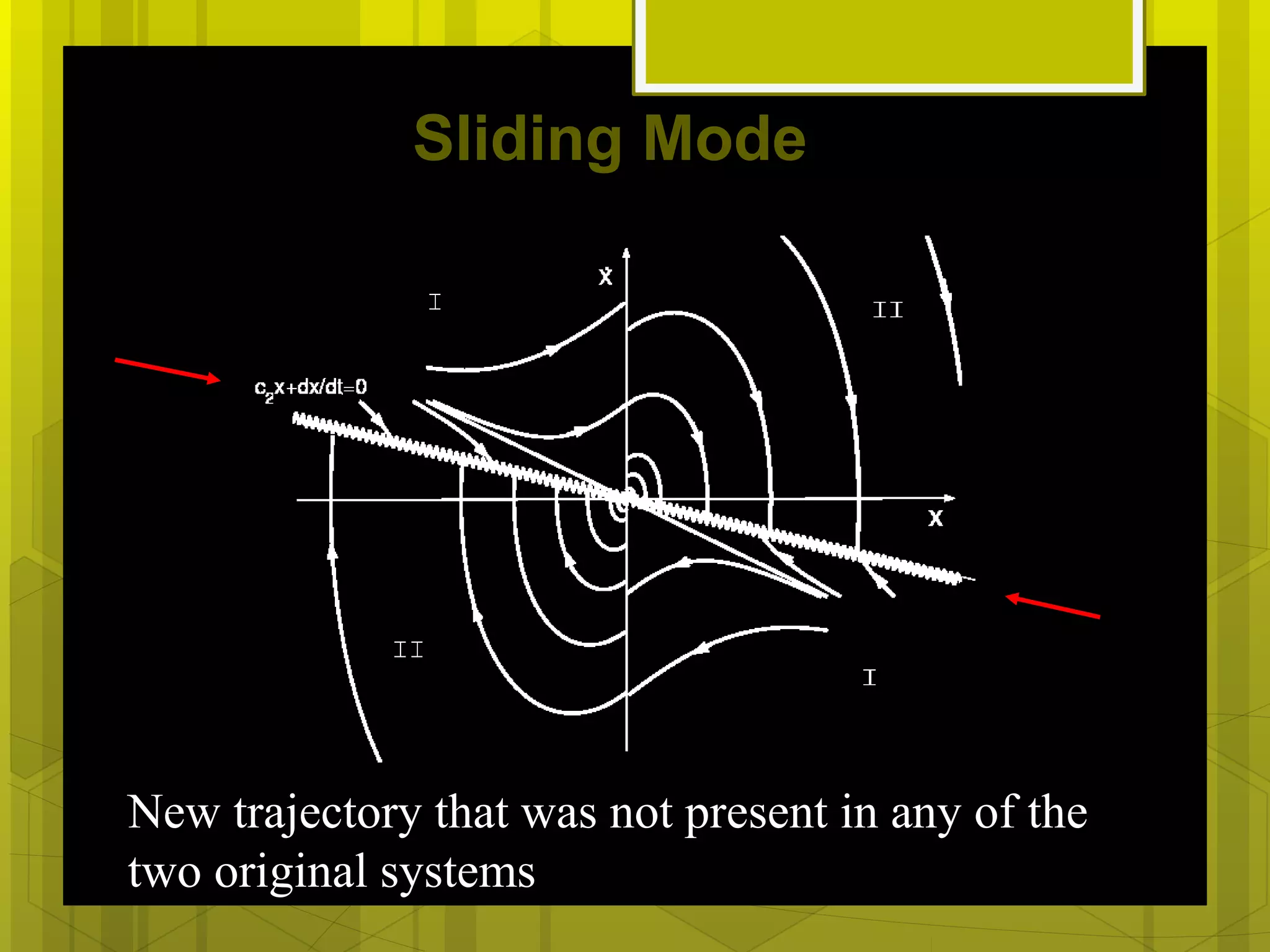
Variable structure control is a form of discontinuous nonlinear control that alters system dynamics through high-frequency switching. It achieves asymptotically stable behavior not present in unstable constituent systems. Sliding mode control is a type of variable structure control that drives the system state along a chosen sliding surface. While providing robustness, sliding mode induces undesirable chattering that actuates unmodeled dynamics. Chattering is reduced by smoothing the discontinuous control law, though this risks losing the sliding mode.