Sliding Mode ControlUsing Matlab Jinkun Liu
download
https://ebookbell.com/product/sliding-mode-control-using-matlab-
jinkun-liu-33556368
Explore and download more ebooks at ebookbell.com
2.
Here are somerecommended products that we believe you will be
interested in. You can click the link to download.
Sliding Mode Control Using Matlab Jinkun Liu
https://ebookbell.com/product/sliding-mode-control-using-matlab-
jinkun-liu-36480708
Sliding Mode Control Using Novel Sliding Surfaces 1st Edition Bijnan
Bandyopadhyay
https://ebookbell.com/product/sliding-mode-control-using-novel-
sliding-surfaces-1st-edition-bijnan-bandyopadhyay-4193734
Discretetime Stochastic Sliding Mode Control Using Functional
Observation 1st Ed 2020 Satnesh Singh
https://ebookbell.com/product/discretetime-stochastic-sliding-mode-
control-using-functional-observation-1st-ed-2020-satnesh-
singh-10801034
Fault Detection And Faulttolerant Control Using Sliding Modes 1st
Edition Halim Alwi
https://ebookbell.com/product/fault-detection-and-faulttolerant-
control-using-sliding-modes-1st-edition-halim-alwi-2448624
3.
Fault Tolerant ControlSchemes Using Integral Sliding Modes 1st
Edition Mirza Tariq Hamayun
https://ebookbell.com/product/fault-tolerant-control-schemes-using-
integral-sliding-modes-1st-edition-mirza-tariq-hamayun-5484508
Sliding Mode Control In Engineering Automation And Control Engineering
1st Wilfrid Perruquetti
https://ebookbell.com/product/sliding-mode-control-in-engineering-
automation-and-control-engineering-1st-wilfrid-perruquetti-2117286
Sliding Mode Control Of Switching Power Converters Techniques And
Implementation 1st Edition Siewchong Tan
https://ebookbell.com/product/sliding-mode-control-of-switching-power-
converters-techniques-and-implementation-1st-edition-siewchong-
tan-2353772
Sliding Mode Control Andrzej Bartoszewicz
https://ebookbell.com/product/sliding-mode-control-andrzej-
bartoszewicz-2380800
Sliding Mode Control In Electromechanical Systems Second Edition
Automation And Control Engineering 2nd Vadim Utkin
https://ebookbell.com/product/sliding-mode-control-in-
electromechanical-systems-second-edition-automation-and-control-
engineering-2nd-vadim-utkin-2414632
Sliding mode controlMATLAB
simulation basic theory and
design method
In the formulation of any control problem, there will typically be discrepancies between the
actual plant and the mathematical model developed for controller design. This mismatch
may be due to unmodelled dynamics, variation in system parameters or the approximation
of complex plant behavior by a straightforward model. The engineer must ensure that the
resulting controller has the ability to produce the required performance levels in practice
despite such plant /model mismatches. This has led to intense interest in the development of
robust control methods that seek to solve this problem. One particular approach to robust
controller design is the sliding mode control methodology.
One of the most intriguing aspects of sliding mode is the discontinuous nature of the control
action, whose primary function of each of the feedback channels is to switch between two
distinctively different system structures (or components) such that a new type of system
motion, called the sliding mode, exists in a manifold. This peculiar system characteristic is
claimed to result in superb system performance, which includes insensitivity to parameter
variations, and complete rejection of disturbances.
Sliding mode control is a particular type of variable structure control. In sliding mode con-
trol, the control system is designed to drive and then constrain the system state to lie within
a neighborhood of the switching function. There are two main advantages to this approach.
Firstly, the dynamic behavior of the system may be tailored by the particular choice of
switching function. Secondly, the closed-loop response becomes totally insensitive to a par-
ticular class of uncertainty. The latter invariance property clearly makes the methodology an
appropriate candidate for robust control. In addition, the ability to specify performance
directly makes sliding mode control attractive from a design perspective.
The sliding mode design approach consists of two components. The first involves the design
of a switching function so that the sliding motion satisfies design specifications. The second
is concerned with the selection of a control law that will make the switching function attrac-
tive to the system state. Note that this control law is not necessarily discontinuous.
The chattering phenomenon is generally perceived as motion that oscillates about the sliding
manifold. There are two possible mechanisms that produce such a motion. Firstly, in the
absence of switching nonidealities such as delays, i.e., the switching device is switching ide-
ally at an infinite frequency, the presence of parasitic dynamics in series with the plant
causes a small amplitude high-frequency oscillation to appear in the neighborhood of the
xi
8.
sliding manifold. Theseparasitic dynamics represent the fast actuator and sensor dynamics.
Secondly, the switching nonidealities alone can cause such high-frequency oscillations.
In this book, we aim to accomplish these objectives:
G Provide reasonable methods of the chattering phenomenon alleviating.
G Offer a catalogue of implementable robust sliding mode control design solutions for
engineering applications.
G Provide advanced sliding mode controller design methods and their stability analysis.
G For each sliding mode control algorithm, we offer its simulation example and Matlab
program.
This book provides the reader with a thorough grounding in sliding mode controller design.
From this basis, more advanced theoretical results are developed. Typical sliding mode con-
troller design is emphasized using Matlab simulation. In this book, concrete case studies,
which present the results of sliding mode controller implementations, are used to illustrate
the successful practical application of the theory.
The book is structured as follows.
Chapter 1, Basic sliding mode control principle and design, introduces the concept of sliding
mode control and illustrates the attendant features of robustness and performance specifica-
tion using a straightforward example and graphical exposition. Several typical sliding mode
controllers for continuous system are introduced, and concrete stability analysis, simulation
examples and Matlab programs are given.
In Chapter 2, Sliding mode control with high performance, firstly an adaptive sliding mode
control is introduced for mechanical systems with tanh function; to avoid a control input
value that is too big, a projection algorithm is used. Secondly, the problem of tracking con-
trol with prescribed performance guarantees is considered, the error evolution within pre-
scribed performance bounds in both problems of regulation and tracking.
In Chapter 3, Sliding mode control based on a state observer, several kinds of state observer
such as high gain observer, K observer, high gain differentiator, robust observer and separa-
tion theorem are introduced, and based on the different observer, sliding mode controller is
designed.
In Chapter 4, Sliding mode control based on disturbance and a delayed observer, an expo-
nential disturbance observer, delayed output observer for linear system and delayed output
observer for nonlinear system are introduced, and closed system stability and convergence
are analyzed.
In Chapter 5, Sliding mode control based on LMI, several kinds of sliding mode controller
based on LMI technology are introduced, closed system stability and convergence are ana-
lyzed, and simulation examples are given.
xii Sliding mode control MATLAB simulation basic theory and design method
9.
In Chapter 6,Sliding mode control based on the RBF neural network, firstly, a simple adap-
tive sliding mode control based on RBF is introduced, then an adaptive sliding mode control
based on RBF compensation is discussed. Sliding mode control based on RBF neural net-
work with minimum parameter learning method is introduced, and finally, a sliding mode
controller based on RBF with MPL is introduced.
In Chapter 7, Sliding mode control based on a fuzzy system, firstly, sliding mode control
based on the fuzzy system approximation is introduced. Then, based on the fuzzy system
with minimum parameter learning method, a sliding mode controller based on fuzzy system
is designed.
In Chapter 8, Sliding mode control of a class of underactuated systems, considering several
kinds of underactuated system, sliding mode controllers are designed, and the Lyapunov
function and the Hurwitz method are used to analyze closed system stability.
In Chapter 9, Sliding mode control for underactuated system with decoupling algorithm, a
general decoupling algorithm for underactuated system is introduced. With this decoupling
algorithm, sliding mode control is designed, and the Lyapunov function and the Hurwitz
method are used to analyze closed system stability.
All the control algorithms are described separately and classified by chapter name; all the
programs can be run successfully in MATLAB and can be downloaded via http://shi.buaa.
edu.cn/liujinkun.
If you have questions about algorithms and simulation programs, please contact the author
at ljk@buaa.edu.cn.
xiii
Sliding mode control MATLAB simulation basic theory and design method
by the particularchoice of switching function, and (2) the closed-loop
response becomes totally insensitive to a particular class of uncertainty.
Also, the ability to specify performance directly makes SMC attractive
from the design perspective.
Trajectory of a system can be stabilized by a sliding mode controller.
After the initial reaching phase, the system states “slides” along the line
s 5 0. The particular s 5 0 surface is chosen because it has desirable
reduced-order dynamics when constrained to it. In this case, the
s 5 cx1 1 _
x1; c . 0. Surface corresponds to the first-order LTI system
_
x1 52cx1, which has an exponentially stable origin.
There are two steps in the SMC design. The first step is designing a
sliding surface so that the plant restricted to the sliding surface has
a desired system response. This means the state variables of the plant
dynamics are constrained to satisfy another set of equations which
define the so-called switching surface. The second step is constructing
a switched feedback gains necessary to drive the plant’s state trajectory
to the sliding surface. These constructions are built on the generalized
Lyapunov stability theory.
Now we give a simple sliding mode controller design example as follows.
1.1 A SIMPLE SLIDING MODE CONTROLLER DESIGN
Consider a plant as
J€
θðtÞ 5 uðtÞ 1 dðtÞ; ð1:1Þ
where J is the inertia moment, €
θðtÞ is the angle signal, uðtÞ is the control
input, dðtÞ is the disturbance and dðtÞ
# η.
Design the sliding mode function as
sðtÞ 5 ceðtÞ 1 _
eðtÞ ð1:2Þ
where c must satisfy Hurwitz condition, c.0.
The tracking error and its derivative value is
eðtÞ 5 θðtÞ 2 θdðtÞ; _
eðtÞ 5 _
θðtÞ 2 _
θdðtÞ
where θdðtÞ is the ideal position signal.
From Eq. (1.2), we can see that if sðtÞ 5 0, then ceðtÞ 1 _
eðtÞ 5 0, and we
can get eðtÞ 5 eð0Þexpð2ctÞ. That is, when t-N, position tracking
2 CHAPTER 1 Basic sliding mode control principle and design
12.
error and speedtracking error will tend to zero exponentially with
c value.
From Eq. (1.2), we have
_
sðtÞ 5 c_
eðtÞ 1 €
eðtÞ 5 c_
eðtÞ 1 €
θðtÞ 2 €
θdðtÞ 5 c_
eðtÞ 1
1
J
ðu 1 dðtÞÞ 2 €
θdðtÞ ð1:3Þ
and
s_
s 5 s c_
e 1
1
J
ðu 1 dðtÞÞ 2 €
θd
:
To guarantee s_
s , 0, design the sliding mode controller as
uðtÞ 5 J 2c_
e 1 €
θd 2
1
J
ðks 1 ηsgnsÞ
ð1:4Þ
Define the Lyapunov function as
V 5
1
2
s2
:
We obtain
_
V 5 s_
s 5 s 2ks 2
1
J
ηsgns 1
1
J
dðtÞ
5
1
J
ð2 ks2
2 η s
j j 1 sdðtÞÞ #2
1
J
ks2
:
Then we have _
V #22
J kV. Use Lemma 1.3, choose α 5 2
J k and f 5 0; we
can obtain
VðtÞ # e22
Jkðt2t0Þ
Vðt0Þ
If k is a positive constant value, VðtÞ will tend to zero exponentially
with k value.
In control law (1.4), the switch term ηsgns is a robust term, which is used
to overcome dðtÞ. However, lager value of η may cause chattering of
control input, how to eliminate the chattering is an important problem
in SMC theory.
Now we give a simulation example to explain, consider the plant as
J€
θðtÞ 5 uðtÞ 1 dðtÞ;
where J 5 2; dðtÞ 5 sint, the initial states are θð0Þ 5 0; _
θð0Þ 5 0.
Choose the position ideal signal θd 5 1:0, use controller (1.4), choose
c 5 10, η 5 1:1, and set k 5 0 and k 5 10, respectively. The results are
shown in Figs. 1.11.6.
3
1.1 A Simple Sliding Mode Controller Design
13.
0 5 1015 20 25 30
0
0.2
0.4
0.6
0.8
1
1.2
1.4
time(s)
Step
response
■ FIGURE 1.1 Position tracking with k 5 10.
0 5 10 15 20 25 30
–20
0
20
40
60
80
100
120
time(s)
Control
input
■ FIGURE 1.2 Control input with k 5 10.
4 CHAPTER 1 Basic sliding mode control principle and design
14.
–1 –0.8 –0.6–0.4 –0.2 0 0.2 0.4
–2
0
2
4
6
8
10
e
de
■ FIGURE 1.3 Phase trajectory with k 5 10.
0 5 10 15 20 25 30
0
0.2
0.4
0.6
0.8
1
1.2
1.4
time(s)
Step
response
■ FIGURE 1.4 Position tracking with k 5 0.
5
1.1 A Simple Sliding Mode Controller Design
15.
0 5 1015 20 25 30
–1.5
–1
–0.5
0
0.5
1
1.5
time(s)
Control
input
■ FIGURE 1.5 Control input with k 5 0.
–1 –0.8 –0.6 –0.4 –0.2 0 0.2 0.4
–2
0
2
4
6
8
10
e
de
■ FIGURE 1.6 Phase trajectory with k 5 0.
6 CHAPTER 1 Basic sliding mode control principle and design
16.
From the results,we can see that the gain k plays an important part, and
the control chattering is caused by the term ηsgns.
1. Simulink main program: chap1_1sim.mdl
2. Controller: chap1_1ctrl.m
function [sys,x0,str,ts] 5 spacemodel(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
case 1,
sys 5 mdlDerivatives(t,x,u);
case 3,
sys 5 mdlOutputs(t,x,u);
case {2,4,9}
sys 5 [];
otherwise
error(['Unhandled flag 5 ',num2str(flag)]);
end
function [sys,x0,str,ts] 5 mdlInitializeSizes
sizes 5 simsizes;
sizes.NumContStates 5 0;
sizes.NumDiscStates 5 0;
sizes.NumOutputs 5 1;
sizes.NumInputs 5 3;
7
1.1 A Simple Sliding Mode Controller Design
17.
sizes.DirFeedthrough 5 1;
sizes.NumSampleTimes5 0;
sys 5 simsizes(sizes);
x0 5 [];
str 5 [];
ts 5 [];
function sys 5 mdlOutputs(t,x,u)
J 5 2;
thd 5 u(1);
th 5 u(2);
dth 5 u(3);
e 5 th 2 thd;
de 5 dth;
c 5 10;
s 5 c*e 1 de;
xite 5 1.1;
k 5 0;
%k 5 10;
ut 5 J*(2 c*dth 2 1/J*(k*s 1 xite*sign(s)));
sys(1) 5 ut;
3. Plant: chap1_1plant.m
function [sys,x0,str,ts] 5 spacemodel(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
case 1,
sys 5 mdlDerivatives(t,x,u);
case 3,
sys 5 mdlOutputs(t,x,u);
case {2,4,9}
sys 5 [];
otherwise
error(['Unhandled flag 5 ',num2str(flag)]);
end
function [sys,x0,str,ts] 5 mdlInitializeSizes
sizes 5 simsizes;
sizes.NumContStates 5 2;
sizes.NumDiscStates 5 0;
sizes.NumOutputs 5 2;
sizes.NumInputs 5 1;
sizes.DirFeedthrough 5 0;
8 CHAPTER 1 Basic sliding mode control principle and design
18.
sizes.NumSampleTimes 5 1;
sys5 simsizes(sizes);
x0 5 [0,0];
str 5 [];
ts 5 [0 0];
function sys 5 mdlDerivatives(t,x,u)
J 5 2;
dt 5 sin(t);
ut 5 u(1);
sys(1) 5 x(2);
sys(2) 5 1/J*(ut 1 dt);
function sys 5 mdlOutputs(t,x,u)
sys(1) 5 x(1);
sys(2) 5 x(2);
4. Plot program: chap1_1plot.m
close all;
figure(1);
plot(t,y(:,1),'r',t,y(:,2),'k:','linewidth',2);
xlabel(‘time(s)');ylabel(‘Step response');
figure(2);
plot(t,ut(:,1),'r','linewidth',2);
xlabel(‘time(s)');ylabel(‘Control input');
c 5 10;
figure(3);
e 5 y(:,2) 2 y(:,1);
de 5 y(:,3);
plot(e,de,'r',e, 2 c'.*e,'k','linewidth',2);
xlabel('e');ylabel('de');
1.2 PARAMETERS DESIGN OF SLIDING MODE
FUNCTION
For a nonlinear system
_
x 5 fðxÞ 1 gðxÞu 1 d; xARn
; uAR; ð1:5Þ
a sliding variable can be designed as
sðxÞ 5 CT
x 5
X
n
i51
cixi 5
X
n21
i51
cixi 1 xn; ð1:6Þ
where x is a state vector, xi 5 xn21
i ; i 5 1; . . .; n and C 5 ½c1 . . . cn21 1T
.
9
1.2 Parameters Design of Sliding Mode Function
19.
If sðxÞ-0, toguarantee xi-0, parameters c1; c2; . . .; cn21 should be
selected so that the polynomial pn21
1 cn21pn22
1 . . . c2p 1 c1 is
Hurwitz, where p is Laplace operator.
For example, n 5 2; sðxÞ 5 c1x1 1 x2, to guarantee the polynomial p 1 c1
Hurwitz, the eigenvalue of p 1 c1 5 0 should has negative real part,
i.e., c1 . 0.
For another example, n 5 3; sðxÞ 5 c1x1 1 c2x2 1 x3, to guarantee the
polynomial p2
1 c2p 1 c1 Hurwitz, the eigenvalue of p2
1 c2p 1 c1 5 0
should has negative real part. For λ . 0 in ðp1λÞ2
5 0, we can get
p2
1 2λp 1 λ2
5 0. Therefore, we have c2 5 2λ; c1 5 λ2
.
1.3 SLIDING MODE CONTROL BASED
ON REACHING LAW
Sliding mode based on reaching law include reaching phase and sliding
phase. The reaching phase drive system to stable manifold, the sliding
phase drive system slide to equilibrium. The idea of sliding mode can be
described as Fig. 1.7.
Sliding manifold
x2
x1
■ FIGURE 1.7 The idea of sliding mode.
10 CHAPTER 1 Basic sliding mode control principle and design
20.
Four kind ofclassical reaching laws are given as follows [6]:
1. Reaching law with constant rate
_
s 5 2εsgns; ε . 0; ð1:7Þ
where ε represents a constant rate.
This law forces the switching variable to reach the switching
manifold s at a constant rate ε. The merit of this reaching law is its
simplicity. But, as will be shown later, if ε is too small, the reaching
time will be too long. On the other hand, too large ε will cause severe
chattering.
2. Exponential reaching law
_
s 5 2εsgns 2ks ε . 0; k . 0; ð1:8Þ
where _
s 5 2 ks is an exponential term, and its solution is s 5 sð0Þe2kt
.
Clearly, by adding the proportional rate term 2ks, the state is
forced to approach the switching manifolds faster when s is larger.
If we use exponential reaching law to design SMC controller,
define the Lyapunov function as V 5 1
2 s2
, then we can get
_
V # 2ε s
j j 2 ks2
5 2 k
2 V 2 ε s
j j # 2 k
2 V.
Using Lemma 1.1 to solve the equation _
V # 2 k
2 V, set
α 5 k
2 ; f 5 0; we can get
VðtÞ # e2k
2ðt2t0Þ
Vðt0Þ:
If k is positive constant value, VðtÞ will tend to zero exponentially
with k value.
In the exponential reaching law, to guarantee faster convergence
speed, especially when s is near to zero, the term _
s52εsgnðsÞ is
used. Moreover, to reduce chattering, we should design a bigger value
of k and use a smaller value of ε.
3. Reaching law with power rate
_
s 5 2 kjsjα
sgns k . 0; 1 . α . 0: ð1:9Þ
This reaching law increases the reaching speed when the state is far
away from the switching manifold, but reduces the rate when the
state is near the manifold. The result is a fast reaching and low
chattering reaching mode.
4. General reaching law
_
s 5 2εsgns 2fðsÞ ε . 0; ð1:10Þ
where fð0Þ 5 0, and when s 6¼ 0; sfðsÞ . 0.
Obviously, the above four reaching laws can satisfy the sliding mode
arrived condition s_
s , 0.
11
1.3 Sliding Mode Control Based on Reaching Law
21.
1.4 ROBUST SLIDINGMODE CONTROL BASED
ON REACHING LAW
1.4.1 System description
The plant is
€
xðtÞ 5 fðx; tÞ 1 buðtÞ 1 dðtÞ; ð1:11Þ
where fðx; tÞ and b are known and b . 0; dðtÞ; dðtÞ is unknown distur-
bance, d t
ð Þ
# D.
1.4.2 Controller design
The sliding mode function is
sðtÞ 5 ceðtÞ 1 _
eðtÞ; ð1:12Þ
where c must satisfy the Hurwitz condition, c . 0.
The tracking error and its derivative value is
e 5 xd 2 x1; _
eðtÞ 5 _
xd 2 _
x1;
where x1 5 x; xd is ideal position signal.
Therefore, we have
_
s 5 c_
eðtÞ 1 €
eðtÞ 5 cð_
xd 2 _
x1Þ 1 ð€
xd 2 €
xÞ
5 cð_
xd 2 _
x1Þ 1 ð€
xd 2 f 2 bu 2 dÞ
: ð1:13Þ
Adopting the exponential reaching law, we have
_
s 5 2 εsgns 2 ks ε . 0; k . 0: ð1:14Þ
From Eqs. (1.13) and (1.14), we have
cð_
xd 2 _
x1Þ 1 ð€
xd 2 f 2 bu 2 dÞ 5 2 εsgns 2 ks:
If we design the sliding mode controller as
uðtÞ 5
1
b
ðεsgns 1 ks 1 cð_
xd 2 _
x1Þ 1 €
xd 2 f 2 dÞ: ð1:15Þ
Obviously, all quantities on the right-hand side of (1.15) are known
except the disturbance d, which is unknown. Thus control law (1.15) can-
not be realized.
Design the sliding mode controller as
uðtÞ 5
1
b
ðεsgns 1 ks 1 cð_
xd 2 _
x1Þ 1 €
xd 2 f 1 DsgnsÞ: ð1:16Þ
Substituting Eq. (1.16) into Eq. (1.13) and simplifying the result, we have
_
sðtÞ 5 2 εsgns 2 ks 2 Dsgns 2 d: ð1:17Þ
12 CHAPTER 1 Basic sliding mode control principle and design
22.
We then get
s_
sðtÞ5 sð2εsgns 2 ks 2 Dsgns 2 dÞ 5 2 ks2
2 ε s
j j 2 D s
j j 2 ds:
Define the Lyapunov function as V 5 1
2 s2
, then we can get
_
V 5 s_
sðtÞ 5 2 ks2
2 ε s
j j 2 D s
j j 2 ds # 2 2kV:
Using Lemma 1.3, we have
VðtÞ # e22kt
Vð0Þ:
We can see that the sliding mode function sðtÞ will tend to zero exponen-
tially with k value.
1.4.3 Simulation example
Consider the plant as
€
xðtÞ 5 fðx; tÞ 1 buðtÞ 1 dðtÞ;
where f 5 225_
x; b 5 133 and dðtÞ 5 10sinðπtÞ.
Choose the ideal position signal xd 5 sint, set the initial states as
20:15 20:15
, use controller (1.16), set c 5 15; ε 5 0:5; k 5 10;
D 5 10:1, the results can be seen in Figs 1.81.10.
0 5 10 15
–1
0
1
2
time(s)
Position
tracking
Ideal position signal
Position tracking
0 5 10 15
–2
0
2
4
time(s)
Speed
tracking
Ideal speed signal
Speed tracking
■ FIGURE 1.8 Position and Speed tracking.
13
1.4 Robust Sliding Mode Control Based on Reaching Law
23.
0 5 1015
–0.3
–0.2
–0.1
0
0.1
0.2
0.3
0.4
0.5
time(s)
Control
input
■ FIGURE 1.9 Control input.
–0.02 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18
–2.5
–2
–1.5
–1
–0.5
0
0.5
1
1.5
e
de
■ FIGURE 1.10 Phase trajectory.
14 CHAPTER 1 Basic sliding mode control principle and design
24.
1. Simulink mainprogram: chap1_2sim.mdl
2. Controller: chap1_2ctrl.m
function [sys,x0,str,ts] 5 spacemodel(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
case 3,
sys 5 mdlOutputs(t,x,u);
case {2,4,9}
sys 5 [];
otherwise
error(['Unhandled flag 5 ',num2str(flag)]);
end
function [sys,x0,str,ts] 5 mdlInitializeSizes
sizes 5 simsizes;
sizes.NumContStates 5 0;
sizes.NumDiscStates 5 0;
sizes.NumOutputs 5 3;
sizes.NumInputs 5 3;
sizes.DirFeedthrough 5 1;
sizes.NumSampleTimes 5 0;
sys 5 simsizes(sizes);
15
1.4 Robust Sliding Mode Control Based on Reaching Law
25.
x0 5 [];
str5 [];
ts 5 [];
function sys 5 mdlOutputs(t,x,u)
xd 5 u(1);
dxd 5 cos(t);
ddxd 5 2 sin(t);
x1 5 u(2);
dx1 5 u(3);
c 5 15;
e 5 xd 2 x1;
de 5 dxd 2 dx1;
s 5 c*e 1 de;
fx 5 2 25*dx1;b 5 133;
D 5 10.1;
epc 5 0.5;k 5 10;
ut 5 1/b*(epc*sign(s) 1 k*s 1 c*de 1 ddxd 2 fx 1 D*sign(s));
sys(1) 5 ut;
sys(2) 5 e;
sys(3) 5 de;
3. Plant: chap1_2plant.m
function [sys,x0,str,ts] 5 s_function(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
case 1,
sys 5 mdlDerivatives(t,x,u);
case 3,
sys 5 mdlOutputs(t,x,u);
case {2, 4, 9}
sys 5 [];
otherwise
error(['Unhandled flag 5 ',num2str(flag)]);
end
function [sys,x0,str,ts] 5 mdlInitializeSizes
sizes 5 simsizes;
sizes.NumContStates 5 2;
sizes.NumDiscStates 5 0;
sizes.NumOutputs 5 2;
sizes.NumInputs 5 1;
16 CHAPTER 1 Basic sliding mode control principle and design
26.
sizes.DirFeedthrough 5 0;
sizes.NumSampleTimes5 0;
sys 5 simsizes(sizes);
x0 5 [
2 0.15 2 0.15];
str 5 [];
ts 5 [];
function sys 5 mdlDerivatives(t,x,u)
sys(1) 5 x(2);
sys(2) 5 2 25*x(2) 1 133*u 1 10*sin(pi*t);
function sys 5 mdlOutputs(t,x,u)
sys(1) 5 x(1);
sys(2) 5 x(2);
4. Plot: chap1_2plot.m
close all;
figure(1);
subplot(211);
plot(t,y(:,1),'k',t,y(:,2),'r:','linewidth',2);
legend('Ideal position signal','Position tracking');
xlabel('time(s)');ylabel('Position tracking');
subplot(212);
plot(t,cos(t),'k',t,y(:,3),'r:','linewidth',2);
legend('Ideal speed signal','Speed tracking');
xlabel('time(s)');ylabel('Speed tracking');
figure(2);
plot(t,u(:,1),'k','linewidth',2);
xlabel('time(s)');ylabel('Control input');
c 5 15;
figure(3);
plot(e,de,'k',e, 2 c'.*e,'r','linewidth',2);
xlabel('e');ylabel('de');
1.5 SLIDING MODE CONTROL BASED
ON A QUASI-SLIDING MODE
Consider the plant as
€
xðtÞ 5 fðx; tÞ 1 buðtÞ 1 dðtÞ: ð1:18Þ
Use controller (1.16) in Section 1.4 as follows:
uðtÞ 5
1
b
ðεsgns 1 ks 1 cð_
xd 2 _
x1Þ 1 €
xd 2 f 1 DsgnsÞ; ð1:19Þ
17
1.5 Sliding Mode Control Based on a Quasi-sliding Mode
27.
where fðx; tÞand b are known and b . 0; dðtÞ is unknown disturbance,
dðtÞ
# D.
In sliding mode controller, due to the switch term εsgns, the chattering
can be caused, especially for a large disturbance, which will damage to
system components such as actuators.
One way to alleviate the chattering is to use quasi-sliding mode method,
which can make the state stay in a certain range at W neighborhood.
Often we name W as the boundary layer.
Instead of the sign function, in continuous system, there are commonly
two methods for quasi-sliding mode design.
1. Saturation function
satðsÞ 5
1 s . Δ
ks s
j j # Δ
21 s ,2Δ
k 5
1
Δ
;
8
:
ð1:20Þ
where Δ is called “the boundary layer”, which is shown in Fig. 1.11.
Outside the boundary layer, we use switch control, inside the bound-
ary layer, we use linear feedback control, then chattering can be
eliminated.
2. Relay function
θðsÞ 5
s
s
j j 1 δ
; ð1:21Þ
where δ is a very small positive constant.
■ FIGURE 1.11 Saturation function.
18 CHAPTER 1 Basic sliding mode control principle and design
28.
Several examples withquasi-sliding mode are given in [1,2]. Recently,
there is a new quasi-sliding mode function, i.e., tanh function, which is
given as follows.
1.6 SLIDING MODE CONTROL BASED
ON CONTINUOUS TANH FUNCTION
1.6.1 Characteristics of tanh function
The discontinuity of the sign function in the SMC law can cause the
chattering. Therefore, in order to avoid the chattering, the discontinuous
sign function can be replaced by the continuous tanh function [7].
In other word, the function is used as an approximator of the sign
function. The steepness of the tanh function determines that how the tanh
can approximate the sign function.
The hyperbolic tangent function is
tanh
x
ε
5
e
x
ε 2 e2x
ε
e
x
ε 1 e2x
ε
; ð1:22Þ
where ε . 0, the steepness of the tanh function is determined by ε value.
1.6.2 Simulation example
Choose ε 5 0:50, the comparison of the tanh function and switch function
are given in Fig. 1.12.
Simulation example: tanh_test.m
clearall;
closeall;
xite 5 5.0;
ts 5 0.01;
for k 5 1:1:4000;
s(k) 5 k*ts 2 20;
y1(k) 5 xite*sign(s(k));
epc 5 0.5;
y2(k) 5 xite*tanh(s(k)/epc);
end
figure(1);
plot(s,y1,'r',s,y2,'k','linewidth',2);
xlabel('s');ylabel('y');
legend('Switch function','Tanh function');
19
1.6 Sliding Mode Control Based on Continuous Tanh Function
29.
1.6.3 Sliding modecontrol based on tanh function
Consider the following plant as
J€
θðtÞ 5 uðtÞ 1 dðtÞ; ð1:23Þ
where J is the moment of inertia, θðtÞ is the angle signal, uðtÞ is the con-
trol input, dðtÞ is disturbance and dt
j j # D.
Then the sliding mode function is:
sðtÞ 5 ceðtÞ 1 _
eðtÞ;
where c must satisfy Hurwitz condition, c . 0.
Tracking error and its derivatives value is
eðtÞ 5 θðtÞ 2 θdðtÞ; _
eðtÞ 5 _
θðtÞ 2 _
θdðtÞ;
where θdðtÞ is ideal angle signal.
Define the Lyapunov function as
V 5
1
2
s2
;
then
_
sðtÞ 5 c_
eðtÞ 1 €
eðtÞ 5 c_
eðtÞ 1 €
θðtÞ 2 €
θdðtÞ 5 c_
eðtÞ 1
1
J
ðu 1 dðtÞÞ 2 €
θdðtÞ
–20 –15 –10 –5 0 5 10 15 20
–5
–4
–3
–2
–1
0
1
2
3
4
5
s
y
Switch function
Tanh function
■ FIGURE 1.12 Tanh function and switch function.
20 CHAPTER 1 Basic sliding mode control principle and design
30.
and
s_
s 5 s
c_
e1
1
J
ðu 1 dðtÞÞ 2 €
θd
To guarantee s_
s , 0, we consider two controllers as follows.
1. SMC based on switch function
uðtÞ 5 Jð2c_
e 1 €
θd 2 ηsÞ 2 DsgnðsÞ; ð1:24Þ
then
s_
s 5 s
c_
e 1 ð2 c_
e 1 €
θd 2 ηsÞ 2
1
J
DsgnðsÞ 1
1
J
dðtÞ 2 €
θd
5 s
2ηs 2
1
J
DsgnðsÞ 1
1
J
dðtÞ
5 2ηs2
2
1
J
D s
j j 1
1
J
sdðtÞ # 2 ηs2
5 22ηV
Then we have _
V # 22ηV; using Lemma.1.3, we get the solution as
VðtÞ # e22ηðt2t0Þ
Vðt0Þ:
According to the above inequality, we can conclude that the tracking
error are exponential convergence, and the convergent precision is
determined by η.
2. SMC based on tanh function
uðtÞ 5 Jð2c_
e 1 €
θd 2 ηsÞ 2 Dtanh
s
ε
: ð1:25Þ
According to Lemma 1.2, we have
s
j j 2 stanh
s
ε
# με: ð1:26Þ
Then D s
j j 2 Dstanh s
ε
# Dμε, that is
2Dstanh
s
ε
# 2 D s
j j 1 Dμε;
therefore
s_
s 5 s c_
e 1
1
J
ðu 1 dðtÞÞ 2 €
θd
5 s c_
e 1 ð2 c_
e 1 €
θd 2 ηsÞ 2
1
J
Dtanh
s
ε
1
1
J
dðtÞ 2 €
θd
5 s 2ηs 2
1
J
D tanh
s
ε
1
1
J
dðtÞ
5 2 ηs2
1
1
J
2Ds tanh
s
ε
1 sdðtÞ
# 2 ηs2
1
1
J
ð2 D s
j j 1 Dμε 1 sdðtÞÞ
# 2 ηs2
1
1
J
D με 5 22ηV 1 b
;
where b 5 1
J Dμε.
21
1.6 Sliding Mode Control Based on Continuous Tanh Function
31.
Then we have_
V # 2 2ηV 1 b, use Lemma 1.3, we get the
solution as
VðtÞ#e22ηðt2t0Þ
Vðt0Þ1be22ηt
ðt
t0
e2ητ
dτ 5e22ηðt2t0Þ
Vðt0Þ1
be22ηt
2η
e2ηt
2e2ηt0
5e22ηðt2t0Þ
Vðt0Þ1
b
2η
12e22ηðt2t0Þ
5e22ηðt2t0Þ
Vðt0Þ1
Dμε
2ηJ
12e22ηðt2t0Þ
;
then
lim
t-N
VðtÞ #
Dμε
2ηJ
: ð1:27Þ
According to inequality (1.27), we can conclude that the tracking
error are asymptotically convergence, and the convergent precision
is determined by D, η and ε.
1.6.4 Simulation example
Consider the plant as
J€
θðtÞ 5 uðtÞ 1 dðtÞ:
We choose J 5 10, ideal angle signals θdðtÞ 5 sint and dðtÞ 5 50sint, and
we choose the initial states of the plant as ½0:5; 1:0. We set
c 5 0:50; η 5 0:50; D 5 50 and ε 5 0:02, and use control laws (1.24) and
(1.25), respectively. The simulation results are shown in Figs. 1.131.16.
Simulation programs:
1. Simulink program: chap1_3sim.mdl
22 CHAPTER 1 Basic sliding mode control principle and design
32.
0 5 1015
–80
–60
–40
–20
0
20
40
60
80
time(s)
Control
input
■ FIGURE 1.14 Control input with switch function.
0 5 10 15
–2
–1
0
1
2
time(s)
Angle
response
Ideal position signal
Position tracking
0 5 10 15
–2
–1
0
1
2
time(s)
Angle
speed
response
Ideal speed signal
Speed tracking
■ FIGURE 1.13 Position and speed tracking with switch function.
23
1.6 Sliding Mode Control Based on Continuous Tanh Function
33.
2. Control lawS function: chap1_3ctrl.m
function [sys,x0,str,ts] 5 spacemodel(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
0 5 10 15
–2
–1
0
1
2
time(s)
Angle
response
Ideal position signal
Position tracking
0 5 10 15
–2
–1
0
1
2
time(s)
Angle
speed
response Ideal speed signal
Speed tracking
■ FIGURE 1.15 Position and Speed tracking with hyperbolic tangent function.
0 5 10 15
–80
–60
–40
–20
0
20
40
60
time(s)
Control
input
■ FIGURE 1.16 Control input with hyperbolic tangent function.
24 CHAPTER 1 Basic sliding mode control principle and design
34.
case 3,
sys 5mdlOutputs(t,x,u);
case {2,4,9}
sys 5 [];
otherwise
error(['Unhandled flag 5 ',num2str(flag)]);
end
function [sys,x0,str,ts] 5 mdlInitializeSizes
sizes 5 simsizes;
sizes.NumContStates 5 0;
sizes.NumDiscStates 5 0;
sizes.NumOutputs 5 1;
sizes.NumInputs 5 3;
sizes.DirFeedthrough 5 1;
sizes.NumSampleTimes 5 0;
sys 5 simsizes(sizes);
x0 5 [];
str 5 [];
ts 5 [];
function sys 5 mdlOutputs(t,x,u)
thd 5 u(1);
dthd 5 cos(t);
ddthd 5 2 sin(t);
th 5 u(2);
dth 5 u(3);
c 5 0.5;
e 5 th 2 thd;
de 5 dth 2 dthd;
s 5 c*e 1 de;
J 5 10;
xite 5 10;
D 5 50;
epc 5 0.02;
M 5 2;
if M 55 1
ut 5 J*( 2 c*de 1 ddthd 2 xite*s) 2 D*sign(s);
elseif M 55 2
ut 5 J*( 2 c*de 1 ddthd 2 xite*s) 2 D*tanh(s/epc);
end
sys(1) 5 ut;
25
1.6 Sliding Mode Control Based on Continuous Tanh Function
35.
3. Plant Sfunction: chap1_3plant.m
function [sys,x0,str,ts] 5 s_function(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
case 1,
sys 5 mdlDerivatives(t,x,u);
case 3,
sys 5 mdlOutputs(t,x,u);
case {2, 4, 9}
sys 5 [];
otherwise
error(['Unhandled flag 5 ',num2str(flag)]);
end
function [sys,x0,str,ts] 5 mdlInitializeSizes
sizes 5 simsizes;
sizes.NumContStates 5 2;
sizes.NumDiscStates 5 0;
sizes.NumOutputs 5 2;
sizes.NumInputs 5 1;
sizes.DirFeedthrough 5 0;
sizes.NumSampleTimes 5 0;
sys 5 simsizes(sizes);
x0 5 [0.5 1.0];
str 5 [];
ts 5 [];
function sys 5 mdlDerivatives(t,x,u)
J 5 10;
dt 5 50*sin(t);
sys(1) 5 x(2);
sys(2) 5 1/J*(u 1 dt);
function sys 5 mdlOutputs(t,x,u)
sys(1) 5 x(1);
sys(2) 5 x(2);
4. Plot program: chap1_3plot.m
close all;
figure(1);
subplot(211);
plot(t,y(:,1),'k',t,y(:,2),'r:','linewidth',2);
legend('Ideal position signal','Position tracking');
26 CHAPTER 1 Basic sliding mode control principle and design
36.
xlabel('time(s)');ylabel('Angle response');
subplot(212);
plot(t,cos(t),'k',t,y(:,3),'r:','linewidth',2);
legend('Ideal speedsignal','Speed tracking');
xlabel('time(s)');ylabel('Angle speed response');
figure(2);
plot(t,ut(:,1),'k','linewidth',0.01);
xlabel('time(s)');ylabel('Control input');
REFERENCES
[1] J. Liu, Matlab Simulation for Sliding Mode Control, third edition, Tsinghua
Springer Press, Beijing, 2015, in Chinese.
[2] J. Liu, X. Wang, Advanced Sliding Mode Control for Mechanical Systems_Design,
Analysis and Matlab Simulation, Tsinghua Springer Press, Beijing, 2011.
[3] U. Itkis, Control System of Variable Structure, Wiley, New York, 1976.
[4] J.Y. Hung, W. Gao, J.C. Hung, Variable structure control: a survey, IEEE Trans.
Ind. Electronics 40 (1) (1993) 222.
[5] C. Edwards, S. Spurgeon, Sliding Mode Control: Theory and Applications, Taylor
and Francis, London, 1998.
[6] W. Gao, J.C. Hung, Variable structure control of nonlinear systems: a new
approach, IEEE Trans. Ind. Electronics 40 (1) (1993) 4555.
[7] M.P. Aghababa, M.E. Akbari, A chattering-free robust adaptive sliding mode
controller for synchronization of two different chaotic systems with unknown uncer-
tainties and external disturbances, Appl. Math. Computat. 218 (2012) 57575768.
[8] M.M. Polycarpou, P.A. Ioannou, A robust adaptive nonlinear control design, IEEE
Am. Control Conf. (1993) 13651369.
[9] P.A. Ioannou, J. Sun, Robust Adaptive Control, PTR Prentice-Hall, Upper Saddle
River, 1996, pp. 7576.
APPENDIX
Lemma 1.1: [7] For every given scalar x and positive scalar ε, the fol-
lowing inequality holds:
xtanh
x
ε
5 xtanh
x
ε
5 x
j j tanh
x
ε
$ 0: ðA1Þ
Lemma 1.1 can be proved as follows: according to the definition of tanh
function, we have
xtanh
x
ε
5 x
e
x
ε 2 e2x
ε
e
x
ε 1 e2x
ε
5
1
e2x
ε 1 1
x e2x
ε 2 1
:
27
Appendix
37.
Since
e2x
ε 2 1$ 0 ifx $ 0
e2x
ε 2 1 , 0 ifx , 0
;
then
x e2x
ε 2 1
$ 0;
therefore
xtanh
x
ε
5
1
e2x
ε 1 1
x e2x
ε 2 1
$ 0;
and
xtanh
x
ε
5 xtanh
x
ε
5 x
j j tanh
x
ε
$ 0:
Lemma 1.2: [8] For every given scalar χAR and positive scalar ε, the
following inequality holds:
0 # χ
2 χtanh
χ
ε
# με; μ 5 0:2785: ðA2Þ
Lemma 1.3: [9] Let f; V: 0; N
½ ÞAR, then _
V # 2 αV 1 f; ’t $ t0 $ 0
implies that
VðtÞ # e2αðt2t0Þ
Vðt0Þ 1
ðt
t0
e2αðt2τÞ
fðτÞdτ
For any finite constant α.
According to [9], we have the proof as follows:
Let ωðtÞ9 _
V 1 αV 2 f , we have ωðtÞ # 0, and
_
V 5 2 αV 1 f 1 ω
implies that
VðtÞ 5 e2αðt2t0Þ
Vðt0Þ 1
ðt
t0
e2αðt2τÞ
fðτÞdτ 1
ðt
t0
e2αðt2τÞ
ωðτÞdτ:
Because ωðtÞ , 0 and ’t $ t0 $ 0, we have
VðtÞ # e2αðt2t0Þ
Vðt0Þ 1
ðt
t0
e2αðt2τÞ
fðτÞdτ:
28 CHAPTER 1 Basic sliding mode control principle and design
38.
Moreover, if wechoose f 5 0, then we have _
V # 2αV, implies that
VðtÞ # e2αðt2t0Þ
Vðt0Þ:
If α is a positive constant value, VðtÞ will tend to zero exponentially with
α value.
29
Appendix
2.1.2 Adaptive slidingmode controller design
We select sliding variable as
s 5 _
e 1 ce 5 x2 2 q
q 5 _
xd 2 ce
; ð2:6Þ
where e 5 x1 2 xd is the position tracking error, and c . 0 is a constant.
Therefore, we have _
s 5 _
x2 2 _
q, the controller is selected as
u 5 ua 1 us1 1 us2; ð2:7Þ
where
ua 5 ^
θ_
q; ð2:8Þ
us1 5 2kss; ð2:9Þ
us2 5 2η tanh
s
ε
; ð2:10Þ
and ua is the adaptive compensation, us1 is the feedback item, us2 is the
robustness item and ks . 0; η . D; ε . 0.
To decrease chattering, in the controller robust term, we use the tanh
function instead of the switch function, i.e., use us2 5 2η tanh s
ε
instead
of us2 5 2ηsignðsÞ.
Therefore, controller (2.7) can be rewritten as
u 5 ^
θ_
q 2 kss 2 η tanh
s
ε
:
Select the Lyapunov function as
V 5
1
2
θs2
1
1
2γ
~
θ
2
; ð2:11Þ
where ~
θ 5 ^
θ 2 θ, γ . 0.
We then get
_
V 5 θs_
s 1
1
γ
~
θ_
~
θ 5 sðθ_
x2 2 θ_
qÞ 1
1
γ
~
θ
_
^
θ:
Design the adaptive law as
_
^
θ 5 2γ _
qs: ð2:12Þ
32 CHAPTER 2 Sliding mode control with high performance
41.
Therefore,
_
V 5 sðu1 Δ 2 θ_
qÞ 1
1
γ
~
θ
_
^
θ
5 s ^
θ_
q 2 kss 2 η tanh
s
ε
1 Δ 2 θ_
q
1
1
γ
~
θð2 γ _
qsÞ
5 s ~
θ_
q 2 kss 2 η tanh
s
ε
1 Δ
2 ~
θð_
qsÞ
:
According to Eq. (1.26), we have
2ηs tanh
s
ε
# 2 η s
j j 1 ημε:
Then
_
V 5 2 kss2
2 η s
j j 1 ημε 1 ΔUs # 2 kss2
1 ημε:
If kss2
$ ημε, i.e., s
j j $
ffiffiffiffiffiffi
ημε
ks
q
, we have 2kss2
1 ημε # 0, i.e., _
V # 0, then
the convergence value is s
j j #
ffiffiffiffiffiffi
ημε
ks
q
, if ks is bigger enough, η and ε is
smaller enough, the convergence value will tend to be very smaller.
Since if V $ 0 and _
V # 0, we can get that if t-N, V is limited, and ^
θ is
limited.
In order to avoid ^
θ is too far from θ, and avoid control input value too
big, we use projection algorithm [1] instead of Eq. (2.12) as follows:
_
^
θ 5 Proj^
θð2γ _
qsÞ; ð2:13Þ
Proj^
θðUÞ 5
0 if ^
θ 5 θmax and U . 0
0 if ^
θ 5 θmin and U , 0
U otherwise
:
8
:
For adaptive law (2.13) and use switch function for (2.10), we have
1. if ^
θ 5 θmax and 2 γ _
qs . 0, set
_
^
θ 5 0, then ~
θ 5 ^
θ 2 θ . 0, γ _
qs , 0, we
have s~
θ_
q , 0, and
_
V 5 sð~
θ_
q 2 kss 2 ηsignðsÞ 1 ΔÞ
5 s~
θ_
q 2 kss2
2 η s
j j 1 ΔUs ,2 kss2
# 0
2. if ^
θ 5 θmin and 2γ _
qs , 0, set
_
^
θ 5 0, then ~
θ 5 ^
θ 2 θ , 0, γ _
qs . 0, we
have s~
θ_
q , 0, and
_
V 5 sð~
θ_
q 2 kss 2 ηsignðsÞ 1 ΔÞ
5 s~
θ_
q 2 kss2
2 η s
j j 1 ΔUs ,2 kss2
# 0
33
2.1 Adaptive Sliding Mode Control for Mechanical Systems With tanh Function
42.
3. if
_
^
θ 52γ _
qs, then Eq. (2.13) is the same as Eq. (2.12), and we have
_
V # 2 kss2
# 0.
From _
V # 2 kss2
# 0, using LaSalle-Yoshizawa theorem [5], we have
lim
t-N
kss2
5 0
This is, when t-N; s-0.
From the above analysis, we can get _
V # 0 with adaptive law
(2.13), and ^
θ will be limited within θmin θmax
.
2.1.3 Simulation example
Consider a linear plant is
dx1
dt
5 x2
m
dx2
dt
5 uðtÞ 1 Δ
;
where m 5 1:0, Δ is the friction model and denoted as
Δ 5 0:5_
θ 1 1:5signð_
θÞ.
The desired trajectory is selected as sint, and the limit range of the parameter
θ is assumed as θmin 5 0:5 and θmax 5 1:5. Choose c 5 15, ks 5 150,
ε 5 0:05, γ 5 500 and η 5 D 1 0:01 5 2:01. Use adaptive sliding mode con-
troller (2.7). If the adaptive law is selected as Eq. (2.12) (M5 1), then the
simulation results are shown in Figs. 2.12.3. If the adaptive law is selected
as Eq. (2.13) (M5 2), then the simulation results are shown in Figs. 2.42.6.
0 5 10 15 20 25 30
–2
–1
0
1
2
time(s)
Position
tracking
Ideal position signal
Position signal tracking
0 5 10 15 20 25 30
–0.6
–0.4
–0.2
0
0.2
time(s)
Position
tracking
error
■ FIGURE 2.1 Position tracking based on adaptive law (2.12) (M 5 1).
34 CHAPTER 2 Sliding mode control with high performance
43.
0 5 1015 20 25 30
–2
–1.5
–1
–0.5
0
0.5
1
1.5
2
2.5
3
x 104
time(s)
Control
input
■ FIGURE 2.2 Control input based on adaptive law (2.12) (M 5 1).
0 5 10 15 20 25 30
–150
–100
–50
0
50
100
150
200
time(s)
J
and
its
estimate
Practical J
Estimated J
■ FIGURE 2.3 The parameter range based on adaptive law (2.12) (M 5 1).
35
2.1 Adaptive Sliding Mode Control for Mechanical Systems With tanh Function
44.
0 5 1015 20 25 30
–1
–0.5
0
0.5
1
time(s)
Position
tracking
Ideal position signal
Position signal tracking
0 5 10 15 20 25 30
–0.6
–0.4
–0.2
0
0.2
time(s)
Position
tracking
error
■ FIGURE 2.4 Position tracking based on adaptive law (2.13) (M 5 2).
0 5 10 15 20 25 30
–1200
–1000
–800
–600
–400
–200
0
200
time(s)
Control
input
■ FIGURE 2.5 Control input based on adaptive law (2.13) (M 5 2).
36 CHAPTER 2 Sliding mode control with high performance
45.
Simulation programs:
1. MainSimulink program: chap2_1sim.mdl
0 5 10 15 20 25 30
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
time(s)
J
and
its
estimate
Practical J
Estimated J
■ FIGURE 2.6 The parameter range based on adaptive law (2.13) (M 5 2).
37
2.1 Adaptive Sliding Mode Control for Mechanical Systems With tanh Function
46.
2. Control lawprogram: chap2_1ctrl..m
function [sys,x0,str,ts] 5 s_function(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
case 3,
sys 5 mdlOutputs(t,x,u);
case {1,2, 4, 9}
sys 5 [];
otherwise
error(['Unhandled flag 5 ',num2str(flag)]);
end
function [sys,x0,str,ts] 5 mdlInitializeSizes
sizes 5 simsizes;
sizes.NumContStates 5 0;
sizes.NumDiscStates 5 0;
sizes.NumOutputs 5 1;
sizes.NumInputs 5 3;
sizes.DirFeedthrough 5 1;
sizes.NumSampleTimes 5 1;
sys 5 simsizes(sizes);
x0 5 [];
str 5 [];
ts 5 [0 0];
function sys 5 mdlOutputs(t,x,u)
e 5 u(1);
de 5 u(2);
dxd 5 cos(t);
ddxd 5 2sin(t);
thp 5 u(3);
c 5 15;
s 5 de 1 c*e; %Sliding Mode
x2 5 dxd 1 de;
dq 5 ddxd 2c*de;
ks 5 150;
xite 5 2.01;
epc 5 0.05;
ua 5 thp*dq;
us1 5 2ks*s;
us2 5 2xite*tanh(s/epc);
ut 5 ua 1 us1 1 us2;
sys(1) 5 ut;
38 CHAPTER 2 Sliding mode control with high performance
47.
3. Plant Sfunction: chap2_1plant.m
function [sys,x0,str,ts] 5 s_function(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
case 1,
sys 5 mdlDerivatives(t,x,u);
case 3,
sys 5 mdlOutputs(t,x,u);
case {2, 4, 9}
sys 5 [];
otherwise
error(['Unhandled flag 5 ',num2str(flag)]);
end
function [sys,x0,str,ts] 5 mdlInitializeSizes
sizes 5 simsizes;
sizes.NumContStates 5 2;
sizes.NumDiscStates 5 0;
sizes.NumOutputs 5 2;
sizes.NumInputs 5 1;
sizes.DirFeedthrough 5 1;
sizes.NumSampleTimes 5 0;
sys 5 simsizes(sizes);
x0 5 [0.5;0];
str 5 [];
ts 5 [];
function sys 5 mdlDerivatives(t,x,u)
m 5 1.0;
ut 5 u(1);
F 5 0.5*x(2) 1 1.5*sign(x(2));
sys(1) 5 x(2);
sys(2) 5 1/m*(ut 2 F);
function sys 5 mdlOutputs(t,x,u)
m 5 1.0;
sys(1) 5 x(1);
sys(2) 5 m;
4. Adaptive law function: chap2_1adapt.m
function [sys,x0,str,ts] 5 s_function(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
39
2.1 Adaptive Sliding Mode Control for Mechanical Systems With tanh Function
48.
case 1,
sys 5mdlDerivatives(t,x,u);
case 3,
sys 5 mdlOutputs(t,x,u);
case {2, 4, 9}
sys 5 [];
otherwise
error(['Unhandled flag 5 ',num2str(flag)]);
end
function [sys,x0,str,ts] 5 mdlInitializeSizes
sizes 5 simsizes;
sizes.NumContStates 5 1;
sizes.NumDiscStates 5 0;
sizes.NumOutputs 5 1;
sizes.NumInputs 5 2;
sizes.DirFeedthrough 5 1;
sizes.NumSampleTimes 5 0;
sys 5 simsizes(sizes);
x0 5 [0];
str 5 [];
ts 5 [];
function sys 5 mdlDerivatives(t,x,u)
e 5 u(1);
de 5 u(2);
dxd 5 cos(t);
ddxd 5 2sin(t);
x2 5 dxd 1 de;
c 5 15;
gama 5 500;
s 5 de 1 c*e;
thp 5 x(1);
dq 5 ddxd 2 c*de;
th_min 5 0.5;
th_max 5 1.5;
alaw 5 2gama*dq*s; %Adaptive law
M 5 1;
if M 55 1 %Adaptive law
sys(1) 5 alaw;
elseif M 55 2 %Adaptive law with Proj
40 CHAPTER 2 Sliding mode control with high performance
49.
if thp .5 th_maxalaw . 0
sys(1) 5 0;
elseif thp , 5 th_minalaw , 0
sys(1) 5 0;
else
sys(1) 5 alaw;
end
end
function sys 5 mdlOutputs(t,x,u)
sys(1) 5 x(1); %m estimate
5. Plot program: chap2_1plot.m
close all;
figure(1);
subplot(211);
plot(t,y(:,1),'k',t,y(:,2),'r:','linewidth',2);
xlabel('time(s)');ylabel('Position tracking');
legend('Ideal position signal','Position signal
tracking');
subplot(212);
plot(t,y(:,1)-y(:,2),'r','linewidth',2);
xlabel('time(s)');ylabel('Position tracking error');
figure(2);
plot(t,ut(:,1),'r','linewidth',2);
xlabel('time(s)');ylabel('Control input');
figure(3);
plot(t,y(:,3),'k',t,p(:,1),'r:','linewidth',2);
xlabel('time(s)');ylabel('J and its estimate');
legend('Practical J','Estimated J');
2.2 SLIDING MODE CONTROL WITH PRESCRIBED
PERFORMANCE
2.2.1 Problem description
Consider a plant as
_
x1 5 x2
_
x2 5 fðxÞ 1 gðxÞðu 1 dðtÞÞ
; ð2:14Þ
where x1 is the position signal, u is the control input, fðxÞ and gðxÞ are
known functions, gðxÞ 6¼ 0, dðtÞ is disturbance and dðtÞ
# D.
Define the ideal signal of x1 as xd, and tracking error as e 5 x1 2 xd, then
_
e 5 x2 2 _
xd, e
€ 5 _
x2 2 €
xd 5 fðxÞ 1 gðxÞðu 1 dðtÞÞ 2 €
xd.
41
2.2 Sliding Mode Control With Prescribed Performance
50.
Define the errorperformance function as
λðtÞ 5 ðλð0ÞÞ 2 λNexpð2 ltÞ 1 λN; ð2:15Þ
where l . 0; 0 , eð0Þ
, λð0Þ; λN . 0; λN , λð0Þ.
Then λðtÞ . 0 and λðtÞ tend to λN exponentially.
2.2.2 Prescribed error performance design
Theorem 2.1: [24]: In order to ensure fast convergence of tracking
error, and achieve a certain convergence accuracy, tracking error is set as
eðtÞ 5 λðtÞSðεÞ: ð2:16Þ
Then the prescribed error performance function can be defined as
SðεÞ 5
eðtÞ
λðtÞ
: ð2:17Þ
The function SðεÞ must satisfied as
1. SðεÞ is smooth continuous and monotone increasing function;
2. 21 , SðεÞ , 1;
3. limε-1NSðεÞ 5 1 and limε-2NSðεÞ 5 2 1.
According to the above requirements, SðεÞ can be designed as follows:
SðεÞ 5
expðεÞ 2 expð2εÞ
expðεÞ 1 expð2εÞ
: ð2:18Þ
Since 21 , SðεÞ , 1, from λðtÞ definition, we have
2λðtÞ , λðtÞSðεÞ , λðtÞ, i.e.,
2λðtÞ , eðtÞ , λðtÞ:
We can then get the tracking error set as
Ξ 5 feAR: jeðtÞj , λ’t $ 0 and jeðtÞj , λNfor t-Ng: ð2:19Þ
2.2.3 Controller design and analysis
According to the properties of the hyperbolic tangent function, the
inverse function of SðεÞ is
ε 5
1
2
ln
1 1 S
1 2 S
5
1
2
ln
1 1
e
λ
1 2
e
λ
5
1
2
ln
λ 1 e
λ 2 e
5
1
2
ðlnðλ 1 eÞÞ 2 lnðλ 2 eÞ:
42 CHAPTER 2 Sliding mode control with high performance
51.
Then
_
ε 5
1
2
_
λ 1_
e
λ 1 e
2
_
λ 2 _
e
λ 2 e
€
ε 5
1
2
ð€
λ 1 €
eÞðλ 1 eÞ 2 ð_
λ1 _
eÞ2
ðλ1eÞ2
2
ð€
λ 2 €
eÞðλ 2 eÞ 2 ð_
λ2 _
eÞ2
ðλ2eÞ2
!
5
€
λðλ 1 eÞ 2 ð_
λ1 _
eÞ2
2ðλ1eÞ2
1
€
eðλ 1 eÞ
2ðλ1eÞ2
2
€
λðλ 2 eÞ 2 ð_
λ2 _
eÞ2
2ðλ2eÞ2
1
€
eðλ 2 eÞ
2ðλ2eÞ2
5
€
λðλ 1 eÞ 2 ð_
λ1 _
eÞ2
2ðλ1eÞ2
2
€
λðλ 2 eÞ 2 ð_
λ2 _
eÞ2
2ðλ2eÞ2
1
λ 1 e
2ðλ1eÞ2
1
λ 2 e
2ðλ2eÞ2
€
e
:
Define M1 5
€
λðλ 1 eÞ 2 ð_
λ1_
eÞ2
2ðλ1eÞ2 , M2 5 2
€
λðλ 2 eÞ 2 ð_
λ2_
eÞ2
2ðλ2eÞ2 and
M3 5 λ 1 e
2ðλ1eÞ2 1 λ 2 e
2ðλ2eÞ2, then
€
ε 5 M1 1 M2 1 M3 €
e 5 M1 1 M2 1 M3ðfðxÞ 1 gðxÞðu 1 dðtÞÞ 2 €
xdÞ:
To realize ε-0, design the sliding mode function as σ 5 _
ε 1 cε, c . 0,
then
_
σ 5 €
ε 1 c_
ε 5 M1 1 M2 1 M3ðfðxÞ 1 gðxÞðu 1 dðtÞÞ 2 €
xdÞ 1 c_
ε;
then
_
σ 5 M1 1 M2 1 M3fðxÞ 1 u1 1 M3gðxÞdðtÞ 2 M3 €
xd 1 c_
ε;
where u1 5 M3gðxÞu.
Design
u1 5 2kσ 2 η M3gðxÞ
sgnðσÞ 2 M1 2 M2 2 M3fðxÞ 1 M3 €
xd 2 c_
ε;
where k . 0, then
_
σ 5 2kσ 2 η M3gðxÞ
sgnðσÞ 1 M3gðxÞdðtÞ:
Design the controller as
u 5
u1
M3gðxÞ
ð2:20Þ
Define the Lyapunov function as
V 5
1
2
σ2
:
Then
_
V 5 σ_
σ 5 σð2 kσ 2 η M3gðxÞ
sgnðσÞ 1 M3gðxÞdðtÞÞ
5 2kσ2
2 η M3gðxÞσ
1 M3gðxÞdðtÞσ # 2 kσ2
5 22kV
;
43
2.2 Sliding Mode Control With Prescribed Performance
52.
where η $D.
From _
V # 2 2kV, we can get
VðtÞ # expð2 2kðt 2 t0ÞÞVðt0Þ:
Therefore, σ converge to zero exponentially, then ε and _
ε converge to
zero exponentially, SðεÞ is limited and converge to zero, from theorem
(2.1), eðtÞ will converge to zero and is limited to Eq. (2.19).
According to properties of the hyperbolic tangent function, we have
_
SðεÞ 5 ð1 2 S2
ðεÞÞ_
ε, then _
SðεÞ converge to zero exponentially. Since _
λ
also converge to zero exponentially, andλ converge to λN exponentially,
then _
eðtÞ 5 _
λS 1 λ _
S will converge to zero asymptotically.
2.2.4 Simulation example
For the plant (2.14), fðxÞ 5 2 25x2; gðxÞ 5 133 and dðtÞ 5 3sint, and the
initial states are 0:50 0
, ideal signal is set as xd 5 sint, then
eð0Þ 5 x1ð0Þ 2 xdð0Þ 5 0:50, and prescribed function is set as Eq. (2.18),
set l 5 5:0, λð0Þ 5 0:51 and λN 5 0:001, use controller (2.20), and set
c 5 50; D 5 3:0; η 5 M3gðxÞ
D 1 0:10; k 5 10, the simulation examples
are shown in Figs. 2.72.10.
0 5 10 15 20 25 30
–0.8
–0.6
–0.4
–0.2
0
0.2
0.4
0.6
time(s)
Position
tracking
error
Upper region boundary
Lower region boundary
Position tracking error
■ FIGURE 2.7 Position tracking error.
44 CHAPTER 2 Sliding mode control with high performance
53.
In the simulation,there are two special conditions that λðtÞ is near to eðtÞ
as follows: (1) when t 5 0, λð0Þ is near to eð0Þ; (2) when t-N, if λN is
very small, eðtÞ will be near to λN. Under the two conditions above,
according to SðεÞ 5 eðtÞ
λðtÞ, SðεÞ will be near to 1:0, and ε 5 1
2 ln 1 1 S
1 2 S will be
singular. To avoid the singularity of ε, λ(0) cannot be chosen to be closed
to eð0Þ, and λN cannot be chosen to be very small.
0 5 10 15 20 25 30
0
10
20
30
40
50
60
time(s)
Angle
speed
error
■ FIGURE 2.8 Speed tracking error.
0 5 10 15 20 25 30
–2
–1
0
1
2
time(s)
Angle
response
Ideal position signal
Position tracking
0 5 10 15 20 25 30
–60
–40
–20
0
20
time(s)
Angle
speed
response
Ideal speed signal
Speed tracking
■ FIGURE 2.9 Position and speed tracking.
45
2.2 Sliding Mode Control With Prescribed Performance
54.
Simulation programs:
1. MainSimulink program: chap2_2sim.mdl
2. Control law program: chap2_2ctrl..m
function [sys,x0,str,ts] 5 spacemodel(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
case 3,
sys 5 mdlOutputs(t,x,u);
0 5 10 15 20 25 30
–80
–60
–40
–20
0
20
40
time(s)
Control
input
■ FIGURE 2.10 Control input.
46 CHAPTER 2 Sliding mode control with high performance
the present StateCoaches of the Archbishop of Canterbury and the
Speaker of the House of Commons[349]
.
It cannot be any matter of surprize, after so luxurious a
conveyance had found its way into the Royal Establishment, that it
should be adopted by others who could support the expence, when
not curbed by sumptuary laws; and we have accordingly seen, that
Coaches prevailed much, early in the Reign of King James; but
Hackney Coaches, which are professedly the Subject of this Memoir,
waited till luxury had made larger strides among us, and till private
Coaches came to market at second hand.
Hackney Coach.
There having always been an imitative luxury in mankind, whereby
the inferior orders might approximate the superior; so those that
could not maintain a Coach de die in diem contrived a means of
having the use of one de horâ in horam. Hence arose our occasional
Vehicles called Hackney Coaches.
The French word Haquenée[350]
implies a common horse for all
purposes of riding, whether for private use or for hire; generally an
ambler, as distinguished from the horses of superior orders, such as
the palfrey and the great horse. The former of these are often called
pad-nags, and were likewise amblers; while horses for draught were
called trotting-horses[351]
: so that the Haquenée was in fact, and in
his use, distinct from all the rest, and inferior in rank and quality.
This term for an ambling-nag occurs in Chaucer[352]
. Thus we
obtained our Haquenée or Hackney Horses long before we had any
Coaches to tack to them; and the term had likewise, at the same
time, made its way into metaphor, to express any thing much and
promiscuously used. Thus Shakspeare, who never lived to ride in a
Hackney Coach, applies the word Hackney to a common woman of
easy access[353]
: and again, in the First Part of Henry IV. (Act iii. Sc.
4), the King says to the Prince of Wales,
57.
Had I solavish of my presence been,
So common-hackneyed in the eyes of men,
So stale and cheap to vulgar company, c.
Now Shakspeare died in the year 1616; whereas Hackney Coaches
were not known, in the Streets at least, till about the year 1625[354]
.
Though the term Haquenée is French, it is not used in France for
Coaches of a like kind; yet, after we had adopted the word as
applied to horses of the common sort, it was easy to put them in
harness, for the service of drawing, and the convenience of the
Inhabitants of the Metropolis; whereby the word Hackney became
transferred to the whole Equipage, then in want of a differential
name; whereof the Coach, being the more striking part, obtained the
name by pre-eminence.
Before I return to my subject, give me leave to add a word or two
on the French Coaches of a similar nature, which are called
Fiacres[355]
. The term is thus accounted for, though I did not suspect
I should have found the meaning in a Martyrology. Fiacre was the
name of a Saint, whose Portrait, like those of many other famous
men of their times both in Church and State, had the honour to
adorn a Sign-Post; and the Inn in Paris, Rue St. Antoine, from which
these Coaches were first let out to hire on temporary occasions, had
the Sign of St. Fiacre, and from thence they took their name. M.
Richelet, in his Dictionary[356]
, tells us, that a Fiacre is Carosse de
loüage, auquel on a donné ce nom à cause de l'Enseigne d'un logis
de la Rue St. Antoine de Paris ou l'on a premierement löué ces
sortes de Carosse. Ce logis avoit pour Enseigne un Saint Fiacre. As
to the Saint himself, he was no less a personage than the second
Son, and at length Heir, of Eugenius IV. King of Scots, who lived in
the Seventh Century. He went into France, took a religious habit,
refusing the Crown of Scotland some years afterwards, on his
Brother's death; and, when he died, was canonized. There is a
Chapel dedicated to him at St. Omer's. His death is commemorated
on the 30th of August[357]
.
58.
As to thetime when the French Fiacres first came into use, we are
led pretty nearly to it by Mr. Menage, who, in his Origines de la
Langue Françoise, published in Quarto, 1650, speaks of them as of
a late introduction. His words are, On appelle ainsi [Fiacre] à Paris
depuis quelques années un Carosse de loüage. He then gives the
same reason as we find in Richelet: but the words depuis quelques
Années shew, that those Coaches had not then been long in use,
and are to be dated either a little before or a little after our own;
insomuch that it is probable the one gave the example to the other,
allowing Mr. Menage credit for twenty-five years, comprehended in
his expression of quelques Années[358]
.
But to return to our Hackney Coaches, which took birth A. D. 1625
(the first year of King Charles I.); and either began to ply in the
Streets, or stood ready at Inns to be called for if wanted: and at that
time did not exceed twenty in number[359]
. But, as luxury makes
large shoots in any branch where it puts forth, so we find that, in no
more than ten years, this new-planted scyon had grown so much as
to require the pruning-knife; for that the Street Coaches had become
in reality a national nuisance in various particulars: and accordingly a
Proclamation issued A.D. 1635 in the following words:
That the great numbers of Hackney Coaches of late time
seen and kept in London, Westminster, and their Suburbs, and
the general and promiscuous use of Coaches there, were not
only a great disturbance to his Majesty, his dearest Consort the
Queen, the Nobility, and others of place and degree, in their
passage through the Streets; but the Streets themselves were
so pestered, and the pavements so broken up, that the common
passage is thereby hindered and made dangerous; and the
prices of hay and provender, and other provisions of stable,
thereby made exceeding dear: Wherefore we expressly
command and forbid, That, from the Feast of St. John the
Baptist next coming, no Hackney or Hired Coaches be used or
suffered in London, Westminster, or the Suburbs or Liberties
thereof, except they be to travel at least three miles out of
59.
London or Westminster,or the Suburbs thereof. And also, that
no person shall go in a Coach in the said Streets, except the
owner of the Coach shall constantly keep up Four able Horses
for our Service, when required[360]
. Dated January 19, 1635-6.
This Proclamation, so long as it was observed, must have put a
considerable check to the use of these Carriages; nor can I think it
could operate much in the King's favour, as it would hardly be worth
a Coach-Master's while to be at so great a contingent charge as the
keeping of Four Horses to be furnished at a moment's warning for
his Majesty's occasional employment. We are to construe this, then,
as amounting to a prohibition, on account of the certain expence
which must follow an uncertain occupation. The nature of this
penalty, as I may call it, was founded on the Statute of Purveyance,
not then repealed.
But there was another co-operating cause that suspended the use
of Coaches for a short time, which was the introduction of the
Hackney Chairs, which took place a very little while before the
Proclamation. They arose from the incommodities stated in the Royal
Edict, and, no doubt, tended in some measure towards the
suppression of the Hackney-Coaches; till by degrees being found
incompetent to answer all their seemingly intended purposes, we
shall see the Coaches, in about two years time, return into the
streets, and resume their functions. But to proceed with the History
of the Chairs. At the critical time, then, when Government was
devising measures to prevent the increase of Coaches as much as
possible, for the reasons alleged in the Proclamation, there stepped
in a Knight, by name Sir Saunders Duncombe, a Gentleman-
Pensioner, and a travelled man, who proposed the introduction of
Chairs, after the model he had seen abroad[361]
. This was in the year
1634; when Sir Saunders obtained an exclusive Patent for the
setting them forth for hire, dated the first day of October, for the
term of fourteen years. The number is not specified, but left perhaps
indefinite, it being impossible to say what would be necessary in a
new device of this sort, tending to be beneficial to the introductor, as
60.
well as convenientto the Publick. The tenor of the Grant, omitting
the words of course, runs thus:
Charles, c.
Whereas the several Streets and Passages within our Cities
of London and Westminster, and the Suburbs of the same, are
of late time so much encumbered and pestered with the
unnecessary multitude of Coaches therein used, that many of
our good and loving Subjects are by that means oftentimes
exposed to great danger; and the necessary use of Carts and
Carriages for the necessary Provisions of the said Cities and
Suburbs thereby also much hindered. And whereas, our servant,
Sir Sanders Duncombe, Knight, hath lately preferred his humble
Petition unto us; thereby shewing, that in many parts beyond
the Seas, the people there are much carried in the Streets in
Chairs that are covered; by which means very few Coaches are
used amongst them: and thereof he hath humbly besought us
to grant unto him the sole using and putting forth to hire of
certain covered Chairs, which he will procure to be made at his
own proper costs and charges, for carrying such of our loving
Subjects as shall desire to use the same, in and about our said
Cities of London and Westminster, and the Suburbs thereof.
Know ye, that we, of our princely care of the good and
welfare of all our loving Subjects, desiring to use all good and
lawful ways and means that may tend to the suppressing of the
excessive and unnecessary number of Coaches now of late used
in and about our said Cities, and the Suburbs thereof; and to
the intent the said Sir Sanders Duncombe may reap some fruit
and benefit of his industry, and may recompense himself of the
costs, charges, and expences, which he shall be at in and about
the directing, making, procuring, and putting in use of the said
covered Chairs, of the purpose aforesaid; and for divers other
good causes and considerations, us hereunto moving, of our
special grace, certain knowledge, and mere motion, have given
and granted, and by these Presents, for Us, our Heirs and
61.
Successors, do giveand grant, unto the said Sir Sanders
Duncombe, his Executors, Administrators, and Assigns, and to
his and their, and every of their, Deputy and Deputies, Servants,
Workmen, Factors, and Agents, and to all and every such
person and persons as shall have power and authority from him,
them, or any of them, in that behalf, full and free Licence,
Privilege, Power, and Authority, that they only, and none other,
shall or may, from time to time, during the term of fourteen
years hereafter granted, use, put forth, and lett to hire, within
our said Cities of London and Westminster, and the Suburbs and
Precincts thereof, or in any part of them, or any of them, the
said covered Chairs, to be carried and borne as aforesaid.
Witness Ourself at Canbury, the First day of October[362]
.
The place principally hinted at in the above Grant, or Patent,
seems to have been the City of Sedan in Champagne; where, we are
at liberty to suppose, these covered Chairs being most in use, they
obtained with us the name of Sedan Chairs, like the local names of
Berlin and Landau[363]
.
These new Vehicles, hitherto unseen in our orbit, had, doubtless,
patrons among the beaus and fine gentlemen of the age; though, in
their general utility, they manifestly could not be so commodious as
Coaches, were it for no other reason than that they could carry but
one person. They might prevail with persons of a certain rank and
description; but the opulent Merchant, and others in a similar line of
family life, still were in want of a conveyance of greater capacity; a
circumstance which would depress the Chairs, and gradually hasten
the re-introduction of the Coaches, and which, as has been
observed, took place accordingly in little more than two years. The
following special commission was therefore granted by the King, A.
D. 1637, wherein the number of the Coaches seems rather to have
enlarged, and the management of them was placed in the
department of the Master of the Horse. It runs essentially in the
following words:
62.
That we, findingit very requisite for our Nobility and Gentry,
as well as for Foreign Ambassadors, Strangers, and others, that
there should be a competent number of Hackney Coaches
allowed for such uses, have, by the advice of our Privy Council,
thought fit to allow Fifty Hackney Coachmen in and about
London and Westminster; limiting them not to keep above
Twelve Horses a-piece. We therefore grant to you [the Marquis]
during your Life, the Power and Authority to license Fifty
Hackney Coachmen, who shall keep no more than Twelve good
Horses each, for their, or any of their, Coach and Coaches
respectively. You also hereby have Power to license so many in
other Cities and Towns of England as in your wisdom shall be
thought necessary; with power to restrain and prohibit all others
from keeping any Hackney Coach to let to hire, either in London
or elsewhere. Also to prescribe Rules and Orders concerning the
daily Prices of the said licensed Hackney Coachmen, to be by
them, or any of them, taken for our own particular service, and
in their employment for our Subjects; provided such orders be
first allowed by us, under our Royal Hand.[364]
We may observe that the article of Purveyance is here very gently
touched upon, and confined to a sign-manual. Mr. Anderson
supposes that there must have been many more than fifty Coaches
introduced by the above allowance of twelve horses; but it seems
rather to imply that no Coach-Master should engross more than six
Coaches to himself. This also might be a tacit mode of preserving a
supply of horses to be purveyed for the King when necessary.
One may collect from hence that private Coaches were sparingly
kept, by the mention of the Nobility and Gentry.
Hitherto we have found the Hackney Coaches under the regulation
of the Crown, or its immediate Officers; but we are now to look for
them at a time when the Monarchical Government was suspended,
during the Protectorate. Whether the Master of the Horse received
any emolument from granting the above Licences, is not apparent;
but under the Commonwealth we find that the Coaches became
63.
subject to atax towards the expence of their regulation; for by an
Act of Oliver's Parliament, A. D. 1654, the number of such Coaches,
within London and Westminster, was enlarged to two hundred[365]
.
The outlying distance was also augmented to six miles round the
late lines of communication, as the Statute expresses it; by which I
conceive that the greatest distance was extended to nine miles,
including the three prescribed, or rather enjoined, by the regulating
proclamation of King Charles I. in the year 1635. By this Act of
Oliver's Parliament, the government of the Hackney Coaches, with
respect to their stands, rates, c. was placed in the Court of
Aldermen of London; and as, of course, this new business would
require Clerks, and other officers, to supervise it, the Coach-Masters
were made subject to the payment of twenty shillings yearly for
every such Coach.
Here we have brought the Coaches under a Police similar to that
of our own time; but it did not long remain in the hands of the
Corporation; for in the year after the Restoration, the establishment
was new-modelled by an Act of the 13th and 14th of King Charles II.
1661, wherein it is specified that no Coaches were to be used
without a Licence,—who may be entitled to such Licences,—that the
number shall not exceed 400,—what shall be the rates,—with
penalties for exacting more[366]
.
Each of these four hundred Coaches so licensed was obliged to
pay annually five pounds for the privilege, to be applied towards the
keeping in repair certain parts of the streets of London and
Westminster[367]
; a very rational appropriation of such fund, for who
ought so much to contribute to the amendment of the streets, as
those who lived by their demolition?
Nex Lex æquior ulla, quam, c.
Within a few years after the Revolution (anno 5 Gul. et Mar. ch.
xxii.) the number of Coaches arose to seven hundred, each of which
paid to the Crown annually four pounds. This, primâ facie, one
would suppose was a relief to the Coach-Masters, and that the
reduction in the impost accrued from the number; but that was not
64.
the case, forevery Owner, for each Coach, was constrained to pay
down fifty pounds for his first Licence for twenty-one years, or
forego his employment; which seeming indulgence was, in fact,
paying five pounds per annum for that term; whereas, probably, the
Coach-Master would rather have continued at the former five
pounds, and have run all risks, than have purchased an exclusive
privilege, in the gross, at so high a price.
The finances, and even the resources, of Government, must have
been very low at this moment, or Ministry could never have stooped
to so paltry and oppressive an expedient, to raise so small a sum as
would arise from these Licences. By the increase of the number of
Coaches from four hundred at five pounds per annum, to seven
hundred at four pounds per annum, the gain to the Treasury was
£.800 annually:—and what did the licences at fifty pounds each
Coach, for the term of twenty-one years, yield to the State?—
£.3,500! Whereas, had such lease of the privilege of driving a Coach
been kept at the rack rent of five pounds per annum, it had
produced in that period £.14,700.
Thus, however the matter rested, till the ninth year of Queen
Anne, 1710, when a Statute was made, which brought the business
to its present standard, with a few variations, which will be observed
in the order of time. By this Act every circumstance was new
modelled; for thereby the Crown was impowered to appoint five
Commissioners for regulating and licensing both Hackney Coaches
and Chairs, from the time the late Statute of the fifth of William and
Mary should expire, viz. at Midsummer A. D. 1715, authorizing such
Commissioners to grant licences to eight hundred Hackney Coaches
from that time for the term of thirty-two years, which should be
allowed to be driven in the Cities of London and Westminster, and
the Suburbs thereof, or any where within the Bills of Mortality; each
Coach paying for such privilege the sum of five shillings per
week[368]
. It was at the same time enacted, that from the 24th of
June, 1711, all horses to be used with an Hackney Coach shall be
fourteen hands high, according to the standard; and further, that
every Coach and Chair shall have a mark of distinction, by figure or
65.
otherwise, as theCommissioners shall think fit; and the said mark
shall be placed on each side of every such Coach and Chair
respectively, in the most convenient place to be taken notice of, to
the end that they may be known if any complaints shall be made of
them[369]
.
This was all that could then be done respecting the Coaches,
forasmuch as the old term of twenty-one years, granted in the fifth
year of William and Mary, 1694, was subsisting, whereby seven
hundred Coaches were allowed, and for which privilege the Owners
had paid fifty pounds each, on whom Government shewed some
tenderness. With regard, however, to regulation, c. there was, no
doubt, room sufficient for the exercise of the powers given to the
Commissioners. There was, likewise, another object involved in this
Statute; viz. the Chairs, which were not comprehended in the same
agreement and contract with the Coaches, but were open
immediately to new laws. Therefore under the same commissions
was placed the management and licensing of the Hackney Chairs, to
commence from the 24th of June in the following year, 1711, for the
said term of thirty-two years; which were thereby limited to the
number of two hundred, each paying for such licence the annual
sum of ten shillings[370]
. As the number of both Coaches and Chairs
was enlarged, whereby many new persons would come forward,
perhaps to the ousting of the old Coach-Masters and Chair-Masters,
it is required by this Act that the Commissioners shall give a
preference to such of the Lessees, as I may call them, whose terms
had not then expired, whether the right remained in themselves or
their widows, if they applied within a given time[371]
.
By this statute likewise the rates were limited to time and
distance, at ten shillings by the Day.—One shilling and six pence for
the first Hour, and one shilling for every succeeding Hour.—One
shilling for the distance of a mile and a half.—One shilling and six
pence for any distance more than a mile and a half, and not
exceeding two miles; and so on, in the proportion of six pence for
every succeeding half mile.
66.
The Chairs arelikewise at the same time rated at two-thirds of the
distance prescribed to the Coaches, so that they were allowed to
take one shilling for a mile, and six pence for every succeeding half
mile.
Though the time of waiting is not specified in the Act with regard
to the Chairs, yet it follows, by implication, to be intended the same
as the Coaches. These have been altered by a very late Statute,
1785. It is well known that it is left in the option of either Coachmen
or Chairmen, whether they will be paid by the distance or the time,
which is but a reasonable privilege; but there is another
circumstance, not generally known, of which the passengers are not
perhaps aware, viz. that if the room which a Coach will occupy in
turning about should exceed the distance allowed, the Coachman is
entitled to a larger fare, that is, as much as if he had gone another
half mile. The doctrine is the same respecting Chairs, and the room
allowed is eight yards in the case of a Coach, and four yards in the
case of a Chair. As the Statute gives all competent allowances to the
Coachmen and Chairmen, so it was requisite, on the other hand, to
make the contract obligatory, and that each of them should be
compellable to perform their parts; and therefore, to do this, and at
the same time to prevent extortion, it became necessary to add a
severe penal clause, viz. that if any Hackney-Coachman or
Chairman shall refuse to go at, or shall exact more for his hire than,
the several rates hereby limited, he shall, for every such offence,
forfeit the sum of forty shillings. These penalties were, by this Act,
to have gone in the proportion of two-thirds to the Queen, and one-
third to the Plaintiff. [Since made half to the Crown and half to the
Complainant.] The Coachmen and Chairmen are thereby likewise
liable to be deprived of their Licences for misbehaviour, or by giving
abusive language[372]
. On the other hand, that the Coachmen and
Chairmen might have a remedy in case of refusal to pay them their
just fare, any Justice of the Peace is impowered, upon complaint, to
issue a warrant to bring before him the Recusant, and to award
reasonable satisfaction to the party aggrieved, or otherwise to bind
him over to the next Quarter-Session, where the Bench is
67.
empowered to levythe said satisfaction by distress. The Act
proceeds to other matters touching the Commissioners themselves,
c.; and then states, that whereas by a Statute of the 29th of
Charles II. the use of all Hackney Coaches and Chairs had been
prohibited on Sundays, it gives full power both to stand and to ply as
on other days.[373]
This is the substance of the Act before us; but it may here be
observed, that in the 10th year of the Queen, 1711, one hundred
more Chairs were added by Statute, subject to the same regulations
as the rest, being found not only convenient but necessary; as the
number of Coaches, consistently with Public Faith, could not be
enlarged till the year 1715, when the old term of twenty-one years
should have expired.
Before all the provisions in the Act of the year 1710, referred to
the future period of 1715, could take place, a demise of the Crown
intervened, A. D. 1714, by which all such clauses, which extended to
a future time, were of course become a nullity.
By Act 12 George I. chap. 12, the number of Chairs was raised to
400, on account of the increase of Buildings Westward.[374]
* * * * * * * *
The Hammer Cloth.
To shew how trifling, though necessary conveniences, arise to
great and expensive luxuries, let us remark the original insignificant
appendage of what we call the Hammer Cloth. It was requisite that
the Coachman should have a few implements in case of accidents, or
a sudden and little repair was wanting to the Coach; for which
purpose he carried a hammer with a few pins, nails, c. with him,
and placed them under his seat, made hollow to hold them, and
which from thence was called the Coach Box; and, in a little time, in
order to conceal this unsightly appearance, a cloth was thrown over
the box and its contents, of which a hammer was the chief, and
68.
thence took thename of the Hammer-Cloth. This is my idea of the
etymon of these two common terms. And here again it can but be
observed that this little appendage is now become the most striking
and conspicuous ornament of the equipage.
69.
Articles of Dress.
GLOVES.
Aboutthe year 790, Charlemagne granted an unlimited right of
hunting to the Abbot and Monks of Sithin, for making their Gloves
and Girdles of the Skins of the Deer they killed, and Covers for their
Books. [Mabillon de Re Diplom. p. 611. Grose.]
Anciently richly adorned and decorated with precious Stones,—as
in the Rolls of Parliament, anno 53 Hen. III. A. D. 1267. Et de 2
Paribus Chirothecarum cum lapidibus. [Warton's History of Poetry,
vol. I. p. 182, note. Grose.]
Edward Vere, Earl of Oxford, according to Mr. Walpole's account,
on the authority of Stowe,—having travelled into Italy, is recorded
to have been the first that brought into England embroidered Gloves
and Perfumes; and presenting the Queen [Elizabeth] with a Pair of
the former, she was so pleased with them, as to be drawn with them
in one of her Portraits. [Royal and Noble Authors, vol. i. p. 159.
Note to Winter's Tale, edit. Johnson and Steevens, 1778, p. 388.]
Give Gloves to the Reapers, a Largesse to cry.
[Tusser, v. Hist. of Hawsted. 190.]
The Monastery of Bury allowed its Servants two pence apiece for
Glove-Silver in Autumn. [Hist. of Hawsted. 190.]
The rural Bridegroom, in Laneham's (or Langham's) Account of
the Entertainment of Queen Elizabeth at Kenelworth Castle, 1575,
had—a Payr of Harvest Gloves on his Hands, as a sign of good
Husbandry. Id. in eod.
When Sir Thomas Pope, the Founder of Trinity College, Oxford,
visited it, 1556, The Bursars offered him a present of embroidered
70.
Gloves. [Warton's Lifeof Sir Thomas Pope, p. 119.]
When Sir Thomas Pope had founded the College, the University
complimented him with a Letter of Thanks, which was accompanied
with a Present of rich Gloves, 1556. [Warton's Life, p. 132, note.]
The Gloves were sent both to himself and Lady, and cost 6s. 8d. [Id.
in eod.]
After the death of Sir Thomas Pope, his Widow married Sir Hugh
Powlett; on which occasion the College presented her, as the Wife of
the Founder, with a Pair of very rich Gloves, the charge for which
runs—Pro Pari Chirothecarum dat. Dom. Powlett et Domine
Fundatrici, xvi s. Idem, p. 185. See also p. 191, ubi sæpe; and p.
411. Pro Chirothecis Magistri Pope, xxxii s.
An article charged in the Bursar's books of Trinity College, Oxford,
is pro fumigatis Chirothecis. [Warton.] These were often given to
College-Tenants, and Guests of Distinction; but this fell into disuse
soon after the Reign of Charles I. Idem. [Grose.]
George Clifford, Earl of Cumberland, received a Glove from Queen
Elizabeth. The Queen had dropped it, when he taking it up to return
to her, she presented it to him as a mark of her esteem. He adorned
it with Jewels, and wore it in the front of his Hat on days of
Tournaments. It is expressed in a print of him by Robert White.
[Bray's Tour, p. 319.]
See for Gloves worn in Hats, Old Plays, vol. ii. p. 132, second
edition: King Lear, act iii. sc. 4. edit, 1778 by Johnson and Steevens.
N. B. Such Tokens as these were called Favours[375]
, from whence
we derive the term for Ribbons given on Weddings. I presume they
are supposed to be given by the hand of the Bride.
Dr. Glisson, in his last visit to Queen Elizabeth, received from her a
Pair of rich Spanish leather Gloves, embossed on the backs and tops
with gold embroidery, and fringed round with gold plate. The Queen,
as he tells us, pulled them from her own Royal Hands, saying, Here,
Glisson, wear them for my sake. Life of Corinna (or Mrs. Eliz.
Thomas), p. xxxi.
71.
Perfumed Gloves[376]
; v.supra.
These Gloves the Count sent me; they are an excellent Perfume.
Much Ado about Nothing, act ii. sc. 4.
Gloves given at Weddings. Old Plays, vol. v. p. 8.
A Glove hung up in a Church, as a public Challenge. Gilpin's Life of
Bernard Gilpin, by Mr. Gilpin, p. 179.
Swearing by Gloves, in jocular conversation, very common. Aye,
by these Gloves! is an expression I have somewhere seen.
Ladies' Sleeves, as well as Gloves, were worn as tokens of
Gallantry. Vide Troil. and Cress, act. v. sc. 2. edit. Johnson and
Steevens, 1778.
Gifts that admitted of it (especially to Women from Men) were
usually worn on the Sleeve.
I knew her by this Jewel on her Sleeve.
Love's Labour Lost, act v. sc. 1.
Fairings, and such Tokens, were of this sort. Hence the Question
and Answer.
Q. What have you brought me? (from the Fair, c.)
A. A new nothing, to pin on your Sleeve.
Hence also to pin one's Faith upon another's Sleeve.
Wear my Heart upon my Sleeve.
Othello, act i. sc. 1.
F. Grose, Esq. to S. Pegge, F. S. A.
September 4, 1784.
72.
Dear Sir,
I havehad such a variety of interruptions (agreeable ones),
that I have made no hand of your Gloves: all that has occurred
on that subject, I here send you.
Blood, who attempted to steal the Crown, presented Mr.
Edwards, Keeper of the Jewel Office, with four Pair of White
Gloves, as from his Wife, in gratitude for his civility to her in a
pretended qualm or sickness. The whole transaction is in
Maitland's History of London.
To give one's Glove was considered as a challenge. See
Shakspeare, in Hen. V. It is still considered in that light by the
Highlanders, of which I once saw an instance in Flanders.
Dropping the Gauntlet, at the Coronation, is a kind of challenge.
When the Judge invites the Justices to dine with him at a
County Assize, a Glove is handed about by the Crier or Clerk of
the Court, who delivers the invitation; into this Glove every one
invited puts a shilling.
A Bribe is called a Pair of Gloves.
In a Play, I think called the Twin Rivals, an Alderman presents
his Glove, filled with Broad Pieces, to a Nobleman, as a Bribe to
procure a Commission for his Son.
Item, for three dozen Leder Gloves, 12s. Vide Account of
Henry VII. in Remembrancer's Office.
I set off next week for Christchurch, where I propose staying
a month, or six weeks at farthest. My best wishes attend you
and yours.
Adieu!
F. Grose.
ERMINE
73.
Gentlewomen's Apparel.
What wecall Ermine is an erroneous conception, for we give the
name to White Fur tufted with Black, whereas it is the Black only
that is properly Ermine, of which numberless instances may be
produced, and this is one.
Powderings on her Bonnet.—This may require an explanation to
those who are unacquainted with the language of that age. What we
call Ermine, is a compound, which will bear a little analysis, for it is
formed of the Fur of one animal, and the tip of the Tail of another.
The White Ground is, properly speaking, Minever, so called from a
Russian animal of that name. [v. Philips's Dictionary, in voce.] The
Ermine is the Armenian Mouse, the tip of whose Tail is Black, which
being placed as a falling tuft upon the Minever, forms what we
collectively call Ermine, the value of which is enhanced the more, as
one animal can afford but one tuft. [v. Bailey's Dict, in voce.] Every
one of these tufts is termed a Powdering.
The Heralds make a distinction between the singular Ermine, and
the Plural, Ermines; the latter, in their language, importing Black
powdered with White: and they go into still more minute
modifications, Erminois, c.
Apparel for the Heads of Gentlewomen.
First, none shall wear an Ermine, or Lettice-Bonnet, unless she be
a Gentlewoman born, having Arms.
Item, a Gentleman's Wife, she being a Gentlewoman born, shall
wear an Ermine or Lettice Bonnet, having one Powdering in the Top.
And if she be of honourable stock, to have two Powderings, one
before another, in the Top.
Item, an Esquire's Wife to have two Powderings.
Item, an Esquire's Wife for the Body to wear five Powderings; and
if she be of great Blood, two before, which maketh seven.
74.
Item, a Knight'sWife to wear on her Bonnet, seven Powderings,
or eight at the most, because of higher Blood, as before.
Item, a Banneret's Wife to wear ten Powderings.
Item, a Baron's Wife thirteen.
Item, a Viscount's [Wife] to wear eighteen.
Item, a Countess to wear twenty-four. And above that Estate the
number convenient, at their pleasures.
Ex Bibl. Harl. No. 1776. fol. 31. b.
MOURNING.
The French Queens, before the Reign of Charles VIII. wore White
upon the death of the King; and were called Reines Blanches. It
was changed to Black on the death of Charles VIII. 1498. [See P.
Dan. Hist. iv. 590.]
In a Wardrobe account for half a year, to Lady-day 1684 (a MS.
purchased by Mr. Brander at the sale of the Library of Geo. Scot,
Esq. of Woolston-Hall, 1781), are the following entries for the King's
Mourning.
A Grey Coat lined with Murrey and White flowered Silk, with Gold
Loops, and four Crape Hat-bands.
Again, A Sad-coloured Silk Coat, lined with Gold-striped
Lutestring, with Silver-and-Silk Buttons; and a Purple Crape
Hatband.
Again, A Purple Coat.
The Emperor Leopold, who died 1705, never shaved his Beard
during the time of Mourning, which often lasted for a long time.
[Bancks's Hist. of Austria, p. 277.]
The Empress-Dowagers never lay aside their Mourning, and even
their Apartments are hung with Black till their deaths. [Bancks's Hist.
75.
of Austria, p.400. He says this from Baron Polnitz's Memoirs, vol. iv.
p. 46.]
The Bavarian Family never give a Black Livery, or line their
Coaches, in the deepest Mourning. [Polnitz, i. letter 22.]
The Pope's Nieces never wear Mourning, not even for their nearest
Relations; as the Romans reckon it so great a happiness for a Family
to have a Pope in it, that nothing ought to afflict his Holiness's
kindred. [Polnitz's Memoirs, ii. letter 33.]
Queen Anne, on the death of Prince George of Denmark, wore
Black and White, with a mixture of Purple in some part of her Dress.
The precedent was taken from that worn by Mary Queen of Scots for
the Earl of Darnley, which was exactly in point. [Secret History of
England, ii. 299.]
King Charles I. put the Court into Mourning for one Day on the
death of the Earl of Portland (Richard Weston), Lord High Treasurer.
[Stafford's Letters, i. 389.]
BEARD, c.
CHARLES I.[377]
—WILLIAM I.
Mrs. Thomas's Great Grand-Father was Mr. Richard Shute, a
Turkey Merchant, one of the Members for the City of London, and
much favoured by King Charles I. who gave him the Name of Sattin-
Shute, by way of distinction from another Branch of the same Name
and Family, and from his usually wearing a Sattin Doublet cut upon
White Taffata.
Without doubt, says Mrs. Thomas (for she was her own
Biographer), he was very nice in the mode of that Age, his Valet
being some hours every morning in starching his Beard, and curling
his Whiskers; but, continues she, during that time a Gentleman,
whom he maintained as a Companion, always read to him on some
useful subject. He lived in Leaden-Hall Street, the site on which
stands the India House, and had a Country-seat at Berking, in Essex.
76.
Here he hada very fine Bowling-green, as he delighted much in that
exercise. The King, who was fond of the diversion, once told Mr.
Shute, he would dine with him some day, and try his skill on his
Bowling-green. The King went, and was so pleased with the place, it
being very retired, and likewise with Mr. Shute's skill in Bowling (he
being accounted one of the best Bowlers of his time), that he
frequently visited afterwards Berking-Hall, without any Guards, and
with three or four select Gentlemen, his attendants, when, as the
King expressed it, he had a mind to drop State, and enjoy himself as
a private man:—Ah, Shute, said he one day, with a deep sigh,
how much happier than I art thou, in this blessed retirement, free
from the cares of a Crown, a factious Ministry, and rebellious
Subjects! They generally played high, and punctually paid their
losings; and though Mr. Shute often won, yet the King would, one
day, set higher than usual, and, having lost several games, gave
over; when Mr. Shute said,—An please your Majesty, One thousand
pounds rubber more, perhaps Luck may turn:—No, Shute, replied
the King, laying his hand gently on his shoulder, Thou hast won the
day, and much good may it do thee, but I must remember I have a
Wife and Children. P. xxi.
This place was afterwards dismantled by Mr. Shute's heir, and in a
few years became a ploughed field. The King gave Mr. Shute several
places; among which were the Deputy Lieutenancy of the Ordnance,
and the Mastership of St. Cross's Hospital, to the amount of four
thousand pounds per annum. P. xxv.
These he gave up when the Civil War broke out; and retired to
Hamburgh, where he died a few years after the death of the King. P.
xxvii.
William the Conqueror played deep; for, tradition says, that Walter
Fitzbourne, a Norman Knight, and great Favourite of the King,
playing at Chess on a Summer's evening, on the banks of the Ouse,
with the King, won all he played for. The King threw down the Board,
saying he had nothing more to play for. Sir, said Sir Walter, here is
land. There is so, replied the King; and if thou beatest me this
77.
Game also, thinebe all the Land on this side the Bourne, or River,
which thou canst see as thou sittest. He had the good fortune to
win; and the King, clapping him on the shoulder, said, Henceforth
thou shalt no more be called Fitzbourne, but Ousebourne.' Hence it
is supposed came the name of Osborne. Life of Corinna, p. xxviii.
78.
Westminstr.
Lord Coke, inhis 3d Inst. (cap. 51.) speaking of the City of
Westminster, says, It hath its name of 'the Monastery,' which
Minster signifieth, and it is called Westminster, in respect of
Eastminster, not far from the Tower of London. This Westminster,
Sebert, the first King of the East Saxons that was christened,
founded. It is added in a note in the margin, Segbert began his
Reign A. D. 603.
Lord Coke, however excellent a Lawyer, I fear was but a bad
Antiquary; for the reverse rather seems to be the case, as it will
appear that Eastminster was so called in respect of Westminster. For
in Stowe's Survey of London (edit. 1633), p. 497, he gives the
following account of the Foundation of the Church of Westminster:
—This Monasterie was founded and builded in the year 605, by
Sebert, King of the East Saxons, upon the perswasion of Ethelbert,
King of Kent, who, having embraced Christianity, and being baptized
by Melitus, Bishop of London, immediately (to shew himself a
Christian indede) built a Church to the honor of God and St. Peter,
on the West side of the City of London, in a place, which (because it
was overgrown with thornes, and environed with water) the Saxons
called 'Thornez,' or 'Thorney;' ... whereupon, partly from the
situation to the West, and partly from the Monasterie or Minster, it
began to take the name of Westminster: and then he goes on with
the history of that Church.
So far of Westminster. Of Eastminster Stowe gives the following
account, by which it will appear that the foundation of Eastminster
was subsequent to that of Westminster, by at least 700 years. In
the year 1348, says he, the 23d of Edward the Third, the first
great Pestilence in his time began, and increased so sore, that for
want of roome in Church-yards to bury the dead of the City and of
79.
the Suburbs, oneJohn Corey, Clerke, procured of Nicholas, Prior of
the Holy Trinity within Ealdgate, one toft of ground neere unto East
Smithfield, for the buriall of them that dyed; with condition, that it
might be called the Church-yard of the Holy Trinity: which ground he
caused, by the ayd of divers devout Citizens, to be inclosed with a
wall of stone; ... and the same was dedicated by Ralfe Stratford,
Bishop of London, where innumerable bodies of the dead, were
afterwards buried, and a Chapel built in the same place to the
honour of God; to the which King Edward setting his eye (having
before, in a tempest on the sea, and peril of drowning, made a vow
to build a Monastery to the honour of God, and our Lady of Grace, if
God would give him grace to come safe to land), builded there a
Monasterie, causing it to be named Eastminster, placing an Abbot
and Monks of the Cistercian or White order. P. 117.
In Stowe, p. 751, is a list of all the Patrones of all the Benefices
in London, in which this Foundation seems to be twice mentioned,
first as the Abbey of White Monks, and then as Mary de Grace, an
Abbey of Monkes, by the Towre of London.
80.
MEMORANDA
RELATIVE TO THE
Societyof the Temple,
LONDON;
Written in or about the Year 1760.
The Societies of the Temple have no Charter; but the Fee was
granted by a Patent to the Professors and Students of the Law, to
them and their Successors for ever.
The King is Visitor of the Temples; and orders have been sent
down from him so lately as Charles the Second's time, for the
Regulation of them, which were brought in great form by the Lord
Chancellor and twelve Judges, and signed by them.
The Discipline of these Societies was formerly, till within these
eighty years, very strict. The Students appeared, upon all occasions,
and in all places, in their proper habits; and for neglecting to appear
in such habit, or for want of decency in it, they were punished by
being put two years backward in their standing. This habit was
discontinued, because the Templars having been guilty of riots in
some parts of the town, being known by their habits to be such, a
reproach was thereby reflected on the Society, for want of discipline.
Commons.—Till there was a relaxation of discipline, the Commons
were continued in the Vacation as well as in the Terms; and the
Members obliged to attend, upon severe penalties for neglect of it.
The Barristers, though they were called to their degree, were not
admitted to practise, but by special leave from the Judges, till three
years after their call, during which their attendance to Commons,
81.
both in Termand Vacation, was not to be compounded for, or
dispensed with.
The Law Societies were, at first, under one general regulation and
establishment, till they branched out, and divided, as it were, into
Colonies. The Societies of each Temple are very zealous in
contending for the Antiquity of their Society.
The Society of the Middle Temple must now be very rich; and it
consists in money, they having no real estate. I have been assured,
that the certain yearly expences of it, exclusive of repairs, amounts
to a considerable sum.
The Benchers are generally in number about twenty, though there
is no fixed number. They may be called to the Bench at eighteen or
twenty years standing. The Bench have power to call whom they
think proper of such standing to the Bench; which if they answer
not, they pay a Fine of Fifty Pounds.
The Benchers eat at their own expence in this Society, having
nothing allowed but their Commons; which few, I believe none, of
the Benchers of the other Houses do.
The Readings, which generally were upon some Statute, continued
about eight days, when there were Treats and Balls at the Reader's
expence; and there is an Order of the House, of no very old date, by
which the Reader was restrained from having above Eight Servants,
which shews, in some measure, the luxury and expence attending
them. They have now been discontinued upwards of seventy years
(the last Reader being Sir William Whitlocke, 1684); but there is a
Reader still appointed every year, and some small Treat, at the
expence of the Society, of Venison, c.; and the Arms of the Reader
are put up in a Pannel in the Hall.
Mr. Bohun, the Writer of several excellent Books in different
branches of the Law, having, when he was Reader at New Inn, put
up a question tending to Blasphemy, (I think it was, whether the
Person of our Saviour was God,) was excommoned by the Society;
that is, he was denied the privilege of coming into the Hall, and at
82.
the same timeobliged to pay for full Commons. They judged
expulsion too mild a punishment.
The Old Hall stood on the South side of Pump Court, which, upon
building a new one, was converted into Sets of Chambers; and
which, by Order of Queen Elizabeth, were not to exceed eight in
number. This was soon after pulled down, and Chambers built in its
stead.
Library.—Left by Will to the Society, by Astley, a Bencher of it. It
contains about Nine Thousand Volumes. Besides this, he left a Set of
Chambers, value three hundred pounds, for the maintenance of a
Librarian, who at first was a Barrister; but, not being thought worth
their acceptance, it is now in the Butler.
Present Hall.—Built by Plowden, who was seven years in
perfecting it. He was three years Treasurer successively; and after
he quitted the Treasurership, he still continued the direction of the
Building.
The Temple Organ was made by Smith. The Societies, being
resolved to have a good Organ, employed one Smith and one Harris
to make each of them an Organ, value five hundred pounds; and
promised that they would give seven hundred pounds for that which
proved the best. This was accordingly done, and Smith's was
preferred and purchased. The other, made by Harris, was sold to
Christ-Church in Dublin; but, being afterwards exchanged for
another made by Byfield for four hundred pounds difference, it was
sold by Byfield to the Church at Woolwich[378]
.
Inns of Chancery, like the Halls at Oxford.
New-Inn belongs to the Middle Temple; and at the expiration of a
long lease, the Fee Simple will be vested in us.
83.
Simnel.
Simnel.—Siminellus from theLatin Simila, which signifies the
Finest Part of the Flour. Panis similageneus, Simnel Bread. It is
mentioned in 'Assisa Panis;' and is still in use, especially in Lent.
Bread made into a Simnel shall weigh two shillings less than Wastell
Bread. Stat. 51 Henry III.
The Statute, intituled Assisa Panis et Cervisiæ, made Anno 51
Hen. III. Stat. I.; and Anno Dom. 1266. Cotton MS. Claudius, D. 2.
... Panis verò de siminello ponderabit minus de Wastello de
duobus solidis, quia bis coctus est.
For the Ordinance for the Assise and Weight of Bread in the City of
London, see Stowe's Survey, p. 740, Edit. 1633.
It was sometime called Simnellus, as in the Annals of the Church
of Winchester, under the year 1042. Rex Edwardus instituit, et cartâ
confirmavit, ut quoties ipse vel aliquis Successorum suorum Regum
Angliæ diadema portaret Wintoniæ vel Wigorniæ vel
Westmonasterii; Præcentor loci recipiet de fisco ipsâ die dimidiam
marcam, et conventus centum Sumnellos et unun modium vini. But,
indeed, the true reading is Siminel.
The English Simnel was the purest White Bread, as in the Book of
Battle Abbey. Panem Regiæ Mensæ aptam, qui Simenel vulgò
vocatur[379]
.
Simula.—A Manchet, a White Loaf. Among the Customs of the
Abbey of Glastonbury: In diebus solemnibus, cum Fratres fuerunt in
cappis, Medonem habuerunt in Justis, et Simulas super mensam, et
vinum ad caritatem, et tria generalia. Chartular. Abbat. Glaston. MS.
fol. 10.
84.
For the useof Saffron, now used for colouring the Crust of the
Simnel, see Shakespear's Winter's Tale; where the Clown (Act iv.)
says, Then I must have Saffron to colour the Warden Pyes.
85.
Origin of ThirteenPence Halfpenny,
AS
HANGMAN'S WAGES;
In a Letter to Edward King, Esq. President of the Society of
Antiquaries.
The vulgar notion, though it will not appear to be a vulgar error,
is, that Thirteen Pence Halfpenny is the fee of the Executioner in the
common line of business at Tyburn[380]
, and therefore is called
Hangman's Wages. The sum is singular, and certainly there is a
reason for its having obtained so odious an appellation, though it
may not be very obvious.
We find that anciently this Office was, in some parts of the
Kingdom, annexed to other Posts; for the Porter of the City of
Canterbury was the Executioner for the County of Kent, temporibus
Hen. II. and Hen. III. for which he had an allowance from the
Sheriff, who was re-imbursed from the Exchequer, of Twenty
Shillings per annum[381]
.
Though this is an Office in great and general disesteem, yet the
Sheriffs are much obliged to those who will undertake it, as
otherwise the unpleasant and painful duty must fall upon
themselves. They are the persons to whom the Law looks for its
completion, as they give a Receipt to the Gaoler for the Bodies of
condemned Criminals whom they are to punish, or cause to be
punished, according to their respective Sentences. The business is of
such an invidious nature, that, in the Country, Sheriffs have
sometimes had much difficulty to procure an Executioner, as, in the
eyes of the lower people, it carries with it a Stigma, apart from any
shock that it must give to Humanity and Compassion. I remember a
86.
very few yearsago, if the News-papers said true, the Sheriff of one
of the Inland Counties was very near being obliged to perform the
unwelcome Office himself.
So that in fact the Hangman is the Sheriff's immediate Deputy in
criminal matters, though there is always, at present, an Under-
Sheriff for civil purposes. But, before I bring you to the point in
question, it will not be amiss to lead you gradually to it, by inquiring
into the nature and dignity of the Office in some particulars, and into
the Rank of the Officer, for we have all heard of Squire Ketch. These
will be found to be supportable matters, as well as the Fee of Office,
which is our ground-work.
The Sheriff is, by being so styled in the King's Patent under the
Great Seal, an Esquire, which raises him to that Rank, unless he has
previously had the Title adventitiously. None were anciently chosen
to this Office, but such Gentlemen whose fortunes and stations
would warrant it; so, on the other hand, Merchants, and other liberal
branches of the lower order, were admitted first into the rank of
Gentlemen, by a grant of Arms, on proper qualifications; from the
Earl Marshal, and the Kings of Arms, respectively, according to their
Provinces. After a Negotiant has become a Gentleman, courtesy will
very soon advance that rank, and give the party the title of Esquire;
and so it has happened with the worthy Gentleman before us, for
such I shall prove him once with ceremony to have been created.
This remarkable case happened in the year 1616, and was as
follows. Ralph Brooke, whose real name was Brokesmouth, at that
time York Herald, not content with being mischievous, was the most
turbulent and malicious man that ever wore the King's Coat. After
various malversations in Office, not to the present purpose, he put a
trick upon Sir William Segar, Garter King of Arms, which had very
nearly cost both of them their places. The story is touched upon in
Mr. Anstis's Register of the Order of the Garter[382]
; but is more fully
and satisfactorily related in the Life of Mr. Camden, prefixed to his
Britannia, to this effect. Ralph Brooke employed a person to carry
a Coat of Arms ready drawn to Garter, and to pretend it belonged to
one Gregory Brandon, a Gentleman who had formerly lived in
87.
London, but thenresiding in Spain, and to desire Garter to set his
hand to it. To prevent deliberation, the messenger was instructed to
pretend that the vessel, which was to carry this confirmation into
Spain, when it had received the Seal of the Office and Garter's Hand,
was just ready to sail[383]
. This being done, and the Fees paid,
Brooke carries it to Thomas Earl of Arundel, then one of the
Commissioners for executing the Office of Earl Marshal; and, in order
to vilify Garter, and to represent him as a rapacious negligent Officer,
assures his Lordship that those were the Arms of Arragon, with a
Canton for Brabant, and that Gregory Brandon was a mean and
inconsiderable person. This was true enough; for he was the
common Hangman for London and Middlesex. Ralph Brooke
afterwards confessed all these circumstances to the Commissioners
who represented the Earl Marshal; the consequence of which was,
that Garter was, by order of the King, when he heard the case,
committed to Prison for negligence, and the Herald for treachery. Be
this as we find it, yet was Gregory Brandon the Hangman become a
Gentleman, and, as the Bastard says in King John, could make any
Joan a Gentlewoman.
Thus was this Gregory Brandon advanced, perhaps from the state
of a Convict, to the rank of a Gentleman; and though it was a
personal honour to himself, notwithstanding it was surreptitiously
obtained by the Herald, of which Gregory Brandon, Gentleman, was
perhaps ignorant, yet did it operate so much on his successors in
office, that afterwards it became transferred from the Family to the
Officer for the time being; and from Mr. Brandon's popularity, though
not of the most desirable kind, the mobility soon improved his rank,
and, with a jocular complaisance, gave him the title of Esquire,
which remains to this day. I have said that Mr. Brandon was perhaps
a Convict; for I know that at York the Hangman has usually been a
pardoned Criminal, whose case was deemed venial, and for which
the performance of this painful duty to fellow-prisoners was thought
a sufficient infliction. It seems too as if this Office had once, like
many other important Offices of State, been hereditary; but whether
88.
Mr. Brandon hadit by descent I cannot say, yet Shakspeare has this
passage in Coriolanus[384]
:
Menenius.—Marcius, in a cheap estimation, is worth all your
Predecessors, since Deucalion; though, peradventure, some of the
best of them were Hereditary Hangmen.
This looks as if the Office of Executioner had run in some Family
for a generation or two, at the time when Shakspeare wrote; and
that it was a circumstance well understood, and would be well
relished, at least by the Galleries. This might indeed, with regard to
time, point at the ancestors of Mr. Brandon himself; for it was in the
Reign of King James I. that this person was, as we have seen,
brought within the pale of Gentility. Nay, more, we are told by Dr.
Grey, in his Notes on Shakspeare[385]
, that from this Gentleman, the
Hangmen, his Successors, bore for a considerable time his Christian
name of Gregory, though not his Arms, they being a personal
honour, till a greater man arose, viz. Jack Ketch, who entailed the
present official name on all who have hitherto followed him[386]
.
Whether the name of Ketch be not the provincial pronunciation of
Catch among the Cockneys, I have my doubts, though I have
printed authority to confront me; for that learned and laborious
Compiler, B. E. Gent. the Editor of the Canting Dictionary, says that
Jack Kitch, for so he spells it, was the real name of a Hangman,
which has become that of all his successors. When this great man
lived, for such we must suppose him to have been, and renowned
for his popularity or dexterity, Biographical History is silent.
So much for this important Office itself; and we must now look to
the Emoluments which appertain to it, and assign a reason why
Thirteen Pence Halfpenny should be esteemed the standard Fee for
this definitive stroke of the law.
Hogarth has given a fine Picture of the sang-froid of an
Executioner in his Print of the London Apprentice; where the Mr.
Ketch for the time being is lolling upon the Gallows, and smoaking
his Pipe; waiting, with the utmost indifference, for the arrival of the
89.
Cart and theMob that close the melancholy Procession. But Use
becomes Nature in things at which even Nature herself revolts.
Before we proceed to matters of a pecuniary nature, having said
so much upon the Executioner, permit me to step out of the way for
a moment, and add a word or two on the Executioné, which will
explain a Yorkshire saying. It was for the most unsuspected crime
imaginable, that the truly unfortunate man who gave rise to the
adage suffered the Sentence of the Law at York. He was a Saddler at
Bawtry, and occasioned this saying, often applied among the lower
people to a man who quits his friends too early, and will not stay to
finish his bottle; That he will be hanged for leaving his liquor, like
the Saddler of Bawtry. The case was this: There was formerly, and
indeed it has not long been suppressed, an Ale-house, to this day
called The Gallows House, situate between the City of York and
their Tyburne; at which House the Cart used always to stop; and
there the Convict and the other parties were refreshed with liquors;
but the rash and precipitate Saddler, under Sentence, and on his
road to the fatal Tree, refused this little regale, and hastened on to
the Place of Execution—when, very soon after he was turned-off, a
Reprieve arrived; insomuch that, had he stopped, as was usual, at
the Gallows House, the time consumed there would have been the
means of saving his life; so that he was hanged, as truly as
unhappily, for leaving his liquor.
The same compliment was anciently paid to Convicts, on their
passage to Tyburne, at St. Giles's Hospital; for we are told by
Stowe[387]
, that they were there presented with a Bowl of Ale, called
St. Giles's Bowl; thereof to drink at their pleasure, as their last
refreshing in this life. This place (Tyburne) was the established
scene of Executions in common cases so long ago as the first year of
King Henry IV; Smithfield and St. Giles's Field being reserved for
persons of higher rank, and for crimes of uncommon magnitude;
such as treason and heresy: in the last of these, Sir John Oldcastle,
Lord Cobham, was burnt, or rather roasted, alive; having been
hanged up over the fire by a chain which went round his waist[388]
.
90.
Welcome to ourwebsite – the perfect destination for book lovers and
knowledge seekers. We believe that every book holds a new world,
offering opportunities for learning, discovery, and personal growth.
That’s why we are dedicated to bringing you a diverse collection of
books, ranging from classic literature and specialized publications to
self-development guides and children's books.
More than just a book-buying platform, we strive to be a bridge
connecting you with timeless cultural and intellectual values. With an
elegant, user-friendly interface and a smart search system, you can
quickly find the books that best suit your interests. Additionally,
our special promotions and home delivery services help you save time
and fully enjoy the joy of reading.
Join us on a journey of knowledge exploration, passion nurturing, and
personal growth every day!
ebookbell.com






![Chapter
1
Basic sliding mode control
principle and design
Sliding mode techniques are one approach to solving control problems
and are an area of increasing interest.
This book provides the reader with classical sliding mode control design
examples, based on [1] and [2].
Variable Structure Control (VSC) with Sliding Mode Control (SMC) was
first proposed and elaborated in early 1950s in the Soviet Union by
Emelyanov and several coresearchers such as Utkins and Itkis [3].
During the last decades significant interest on VSC and SMC have been
generated in the control research community.
SMC has been applied including nonlinear system, multiinput multioutput
(MIMO) systems, discrete-time models, large-scale and infinite-dimension
systems, and stochastic systems. The most eminent feature of SMC is it is
completely insensitive to parametric uncertainty and external disturbances
during sliding mode [4].
Essentially, VSC utilizes a high-speed switching control law to drive the
nonlinear plant’s state trajectory onto a specified and user-chosen surface
in the state space, which is called the sliding or switching surface, and to
maintain the plant’s state trajectory on this surface for all subsequent
time. This surface is called the switching surface because if the state
trajectory of the plant is “above” the surface, a control path has one
gain and a different gain if the trajectory drops “below” the surface.
During the process, the control system’s structure varies from one to
another, thus earning the name VSC. To emphasize the important role of
the sliding mode, the control is also called SMC [5].
In SMC, the system is designed to drive and then constrain the system
state to lie within a neighborhood of the switching function. Its two main
advantages are (1) the dynamic behavior of the system may be tailored
1
Sliding Mode Control Using MATLAB. DOI: http://dx.doi.org/10.1016/B978-0-12-802575-8.00001-1
Copyright © 2017 Tsinghua University Press Limited. Published by Elsevier Inc. All rights reserved.](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-10-320.jpg)





![From the results, we can see that the gain k plays an important part, and
the control chattering is caused by the term ηsgns.
1. Simulink main program: chap1_1sim.mdl
2. Controller: chap1_1ctrl.m
function [sys,x0,str,ts] 5 spacemodel(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
case 1,
sys 5 mdlDerivatives(t,x,u);
case 3,
sys 5 mdlOutputs(t,x,u);
case {2,4,9}
sys 5 [];
otherwise
error(['Unhandled flag 5 ',num2str(flag)]);
end
function [sys,x0,str,ts] 5 mdlInitializeSizes
sizes 5 simsizes;
sizes.NumContStates 5 0;
sizes.NumDiscStates 5 0;
sizes.NumOutputs 5 1;
sizes.NumInputs 5 3;
7
1.1 A Simple Sliding Mode Controller Design](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-16-320.jpg)
![sizes.DirFeedthrough 5 1;
sizes.NumSampleTimes 5 0;
sys 5 simsizes(sizes);
x0 5 [];
str 5 [];
ts 5 [];
function sys 5 mdlOutputs(t,x,u)
J 5 2;
thd 5 u(1);
th 5 u(2);
dth 5 u(3);
e 5 th 2 thd;
de 5 dth;
c 5 10;
s 5 c*e 1 de;
xite 5 1.1;
k 5 0;
%k 5 10;
ut 5 J*(2 c*dth 2 1/J*(k*s 1 xite*sign(s)));
sys(1) 5 ut;
3. Plant: chap1_1plant.m
function [sys,x0,str,ts] 5 spacemodel(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
case 1,
sys 5 mdlDerivatives(t,x,u);
case 3,
sys 5 mdlOutputs(t,x,u);
case {2,4,9}
sys 5 [];
otherwise
error(['Unhandled flag 5 ',num2str(flag)]);
end
function [sys,x0,str,ts] 5 mdlInitializeSizes
sizes 5 simsizes;
sizes.NumContStates 5 2;
sizes.NumDiscStates 5 0;
sizes.NumOutputs 5 2;
sizes.NumInputs 5 1;
sizes.DirFeedthrough 5 0;
8 CHAPTER 1 Basic sliding mode control principle and design](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-17-320.jpg)
![sizes.NumSampleTimes 5 1;
sys 5 simsizes(sizes);
x0 5 [0,0];
str 5 [];
ts 5 [0 0];
function sys 5 mdlDerivatives(t,x,u)
J 5 2;
dt 5 sin(t);
ut 5 u(1);
sys(1) 5 x(2);
sys(2) 5 1/J*(ut 1 dt);
function sys 5 mdlOutputs(t,x,u)
sys(1) 5 x(1);
sys(2) 5 x(2);
4. Plot program: chap1_1plot.m
close all;
figure(1);
plot(t,y(:,1),'r',t,y(:,2),'k:','linewidth',2);
xlabel(‘time(s)');ylabel(‘Step response');
figure(2);
plot(t,ut(:,1),'r','linewidth',2);
xlabel(‘time(s)');ylabel(‘Control input');
c 5 10;
figure(3);
e 5 y(:,2) 2 y(:,1);
de 5 y(:,3);
plot(e,de,'r',e, 2 c'.*e,'k','linewidth',2);
xlabel('e');ylabel('de');
1.2 PARAMETERS DESIGN OF SLIDING MODE
FUNCTION
For a nonlinear system
_
x 5 fðxÞ 1 gðxÞu 1 d; xARn
; uAR; ð1:5Þ
a sliding variable can be designed as
sðxÞ 5 CT
x 5
X
n
i51
cixi 5
X
n21
i51
cixi 1 xn; ð1:6Þ
where x is a state vector, xi 5 xn21
i ; i 5 1; . . .; n and C 5 ½c1 . . . cn21 1T
.
9
1.2 Parameters Design of Sliding Mode Function](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-18-320.jpg)

![Four kind of classical reaching laws are given as follows [6]:
1. Reaching law with constant rate
_
s 5 2εsgns; ε . 0; ð1:7Þ
where ε represents a constant rate.
This law forces the switching variable to reach the switching
manifold s at a constant rate ε. The merit of this reaching law is its
simplicity. But, as will be shown later, if ε is too small, the reaching
time will be too long. On the other hand, too large ε will cause severe
chattering.
2. Exponential reaching law
_
s 5 2εsgns 2ks ε . 0; k . 0; ð1:8Þ
where _
s 5 2 ks is an exponential term, and its solution is s 5 sð0Þe2kt
.
Clearly, by adding the proportional rate term 2ks, the state is
forced to approach the switching manifolds faster when s is larger.
If we use exponential reaching law to design SMC controller,
define the Lyapunov function as V 5 1
2 s2
, then we can get
_
V # 2ε s
j j 2 ks2
5 2 k
2 V 2 ε s
j j # 2 k
2 V.
Using Lemma 1.1 to solve the equation _
V # 2 k
2 V, set
α 5 k
2 ; f 5 0; we can get
VðtÞ # e2k
2ðt2t0Þ
Vðt0Þ:
If k is positive constant value, VðtÞ will tend to zero exponentially
with k value.
In the exponential reaching law, to guarantee faster convergence
speed, especially when s is near to zero, the term _
s52εsgnðsÞ is
used. Moreover, to reduce chattering, we should design a bigger value
of k and use a smaller value of ε.
3. Reaching law with power rate
_
s 5 2 kjsjα
sgns k . 0; 1 . α . 0: ð1:9Þ
This reaching law increases the reaching speed when the state is far
away from the switching manifold, but reduces the rate when the
state is near the manifold. The result is a fast reaching and low
chattering reaching mode.
4. General reaching law
_
s 5 2εsgns 2fðsÞ ε . 0; ð1:10Þ
where fð0Þ 5 0, and when s 6¼ 0; sfðsÞ . 0.
Obviously, the above four reaching laws can satisfy the sliding mode
arrived condition s_
s , 0.
11
1.3 Sliding Mode Control Based on Reaching Law](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-20-320.jpg)



![1. Simulink main program: chap1_2sim.mdl
2. Controller: chap1_2ctrl.m
function [sys,x0,str,ts] 5 spacemodel(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
case 3,
sys 5 mdlOutputs(t,x,u);
case {2,4,9}
sys 5 [];
otherwise
error(['Unhandled flag 5 ',num2str(flag)]);
end
function [sys,x0,str,ts] 5 mdlInitializeSizes
sizes 5 simsizes;
sizes.NumContStates 5 0;
sizes.NumDiscStates 5 0;
sizes.NumOutputs 5 3;
sizes.NumInputs 5 3;
sizes.DirFeedthrough 5 1;
sizes.NumSampleTimes 5 0;
sys 5 simsizes(sizes);
15
1.4 Robust Sliding Mode Control Based on Reaching Law](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-24-320.jpg)
![x0 5 [];
str 5 [];
ts 5 [];
function sys 5 mdlOutputs(t,x,u)
xd 5 u(1);
dxd 5 cos(t);
ddxd 5 2 sin(t);
x1 5 u(2);
dx1 5 u(3);
c 5 15;
e 5 xd 2 x1;
de 5 dxd 2 dx1;
s 5 c*e 1 de;
fx 5 2 25*dx1;b 5 133;
D 5 10.1;
epc 5 0.5;k 5 10;
ut 5 1/b*(epc*sign(s) 1 k*s 1 c*de 1 ddxd 2 fx 1 D*sign(s));
sys(1) 5 ut;
sys(2) 5 e;
sys(3) 5 de;
3. Plant: chap1_2plant.m
function [sys,x0,str,ts] 5 s_function(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
case 1,
sys 5 mdlDerivatives(t,x,u);
case 3,
sys 5 mdlOutputs(t,x,u);
case {2, 4, 9}
sys 5 [];
otherwise
error(['Unhandled flag 5 ',num2str(flag)]);
end
function [sys,x0,str,ts] 5 mdlInitializeSizes
sizes 5 simsizes;
sizes.NumContStates 5 2;
sizes.NumDiscStates 5 0;
sizes.NumOutputs 5 2;
sizes.NumInputs 5 1;
16 CHAPTER 1 Basic sliding mode control principle and design](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-25-320.jpg)
![sizes.DirFeedthrough 5 0;
sizes.NumSampleTimes 5 0;
sys 5 simsizes(sizes);
x0 5 [
2 0.15 2 0.15];
str 5 [];
ts 5 [];
function sys 5 mdlDerivatives(t,x,u)
sys(1) 5 x(2);
sys(2) 5 2 25*x(2) 1 133*u 1 10*sin(pi*t);
function sys 5 mdlOutputs(t,x,u)
sys(1) 5 x(1);
sys(2) 5 x(2);
4. Plot: chap1_2plot.m
close all;
figure(1);
subplot(211);
plot(t,y(:,1),'k',t,y(:,2),'r:','linewidth',2);
legend('Ideal position signal','Position tracking');
xlabel('time(s)');ylabel('Position tracking');
subplot(212);
plot(t,cos(t),'k',t,y(:,3),'r:','linewidth',2);
legend('Ideal speed signal','Speed tracking');
xlabel('time(s)');ylabel('Speed tracking');
figure(2);
plot(t,u(:,1),'k','linewidth',2);
xlabel('time(s)');ylabel('Control input');
c 5 15;
figure(3);
plot(e,de,'k',e, 2 c'.*e,'r','linewidth',2);
xlabel('e');ylabel('de');
1.5 SLIDING MODE CONTROL BASED
ON A QUASI-SLIDING MODE
Consider the plant as
€
xðtÞ 5 fðx; tÞ 1 buðtÞ 1 dðtÞ: ð1:18Þ
Use controller (1.16) in Section 1.4 as follows:
uðtÞ 5
1
b
ðεsgns 1 ks 1 cð_
xd 2 _
x1Þ 1 €
xd 2 f 1 DsgnsÞ; ð1:19Þ
17
1.5 Sliding Mode Control Based on a Quasi-sliding Mode](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-26-320.jpg)

![Several examples with quasi-sliding mode are given in [1,2]. Recently,
there is a new quasi-sliding mode function, i.e., tanh function, which is
given as follows.
1.6 SLIDING MODE CONTROL BASED
ON CONTINUOUS TANH FUNCTION
1.6.1 Characteristics of tanh function
The discontinuity of the sign function in the SMC law can cause the
chattering. Therefore, in order to avoid the chattering, the discontinuous
sign function can be replaced by the continuous tanh function [7].
In other word, the function is used as an approximator of the sign
function. The steepness of the tanh function determines that how the tanh
can approximate the sign function.
The hyperbolic tangent function is
tanh
x
ε
5
e
x
ε 2 e2x
ε
e
x
ε 1 e2x
ε
; ð1:22Þ
where ε . 0, the steepness of the tanh function is determined by ε value.
1.6.2 Simulation example
Choose ε 5 0:50, the comparison of the tanh function and switch function
are given in Fig. 1.12.
Simulation example: tanh_test.m
clearall;
closeall;
xite 5 5.0;
ts 5 0.01;
for k 5 1:1:4000;
s(k) 5 k*ts 2 20;
y1(k) 5 xite*sign(s(k));
epc 5 0.5;
y2(k) 5 xite*tanh(s(k)/epc);
end
figure(1);
plot(s,y1,'r',s,y2,'k','linewidth',2);
xlabel('s');ylabel('y');
legend('Switch function','Tanh function');
19
1.6 Sliding Mode Control Based on Continuous Tanh Function](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-28-320.jpg)




![2. Control law S function: chap1_3ctrl.m
function [sys,x0,str,ts] 5 spacemodel(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
0 5 10 15
–2
–1
0
1
2
time(s)
Angle
response
Ideal position signal
Position tracking
0 5 10 15
–2
–1
0
1
2
time(s)
Angle
speed
response Ideal speed signal
Speed tracking
■ FIGURE 1.15 Position and Speed tracking with hyperbolic tangent function.
0 5 10 15
–80
–60
–40
–20
0
20
40
60
time(s)
Control
input
■ FIGURE 1.16 Control input with hyperbolic tangent function.
24 CHAPTER 1 Basic sliding mode control principle and design](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-33-320.jpg)
![case 3,
sys 5 mdlOutputs(t,x,u);
case {2,4,9}
sys 5 [];
otherwise
error(['Unhandled flag 5 ',num2str(flag)]);
end
function [sys,x0,str,ts] 5 mdlInitializeSizes
sizes 5 simsizes;
sizes.NumContStates 5 0;
sizes.NumDiscStates 5 0;
sizes.NumOutputs 5 1;
sizes.NumInputs 5 3;
sizes.DirFeedthrough 5 1;
sizes.NumSampleTimes 5 0;
sys 5 simsizes(sizes);
x0 5 [];
str 5 [];
ts 5 [];
function sys 5 mdlOutputs(t,x,u)
thd 5 u(1);
dthd 5 cos(t);
ddthd 5 2 sin(t);
th 5 u(2);
dth 5 u(3);
c 5 0.5;
e 5 th 2 thd;
de 5 dth 2 dthd;
s 5 c*e 1 de;
J 5 10;
xite 5 10;
D 5 50;
epc 5 0.02;
M 5 2;
if M 55 1
ut 5 J*( 2 c*de 1 ddthd 2 xite*s) 2 D*sign(s);
elseif M 55 2
ut 5 J*( 2 c*de 1 ddthd 2 xite*s) 2 D*tanh(s/epc);
end
sys(1) 5 ut;
25
1.6 Sliding Mode Control Based on Continuous Tanh Function](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-34-320.jpg)
![3. Plant S function: chap1_3plant.m
function [sys,x0,str,ts] 5 s_function(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
case 1,
sys 5 mdlDerivatives(t,x,u);
case 3,
sys 5 mdlOutputs(t,x,u);
case {2, 4, 9}
sys 5 [];
otherwise
error(['Unhandled flag 5 ',num2str(flag)]);
end
function [sys,x0,str,ts] 5 mdlInitializeSizes
sizes 5 simsizes;
sizes.NumContStates 5 2;
sizes.NumDiscStates 5 0;
sizes.NumOutputs 5 2;
sizes.NumInputs 5 1;
sizes.DirFeedthrough 5 0;
sizes.NumSampleTimes 5 0;
sys 5 simsizes(sizes);
x0 5 [0.5 1.0];
str 5 [];
ts 5 [];
function sys 5 mdlDerivatives(t,x,u)
J 5 10;
dt 5 50*sin(t);
sys(1) 5 x(2);
sys(2) 5 1/J*(u 1 dt);
function sys 5 mdlOutputs(t,x,u)
sys(1) 5 x(1);
sys(2) 5 x(2);
4. Plot program: chap1_3plot.m
close all;
figure(1);
subplot(211);
plot(t,y(:,1),'k',t,y(:,2),'r:','linewidth',2);
legend('Ideal position signal','Position tracking');
26 CHAPTER 1 Basic sliding mode control principle and design](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-35-320.jpg)
![xlabel('time(s)');ylabel('Angle response');
subplot(212);
plot(t,cos(t),'k',t,y(:,3),'r:','linewidth',2);
legend('Ideal speed signal','Speed tracking');
xlabel('time(s)');ylabel('Angle speed response');
figure(2);
plot(t,ut(:,1),'k','linewidth',0.01);
xlabel('time(s)');ylabel('Control input');
REFERENCES
[1] J. Liu, Matlab Simulation for Sliding Mode Control, third edition, Tsinghua
Springer Press, Beijing, 2015, in Chinese.
[2] J. Liu, X. Wang, Advanced Sliding Mode Control for Mechanical Systems_Design,
Analysis and Matlab Simulation, Tsinghua Springer Press, Beijing, 2011.
[3] U. Itkis, Control System of Variable Structure, Wiley, New York, 1976.
[4] J.Y. Hung, W. Gao, J.C. Hung, Variable structure control: a survey, IEEE Trans.
Ind. Electronics 40 (1) (1993) 222.
[5] C. Edwards, S. Spurgeon, Sliding Mode Control: Theory and Applications, Taylor
and Francis, London, 1998.
[6] W. Gao, J.C. Hung, Variable structure control of nonlinear systems: a new
approach, IEEE Trans. Ind. Electronics 40 (1) (1993) 4555.
[7] M.P. Aghababa, M.E. Akbari, A chattering-free robust adaptive sliding mode
controller for synchronization of two different chaotic systems with unknown uncer-
tainties and external disturbances, Appl. Math. Computat. 218 (2012) 57575768.
[8] M.M. Polycarpou, P.A. Ioannou, A robust adaptive nonlinear control design, IEEE
Am. Control Conf. (1993) 13651369.
[9] P.A. Ioannou, J. Sun, Robust Adaptive Control, PTR Prentice-Hall, Upper Saddle
River, 1996, pp. 7576.
APPENDIX
Lemma 1.1: [7] For every given scalar x and positive scalar ε, the fol-
lowing inequality holds:
xtanh
x
ε
5 xtanh
x
ε
5 x
j j tanh
x
ε
$ 0: ðA1Þ
Lemma 1.1 can be proved as follows: according to the definition of tanh
function, we have
xtanh
x
ε
5 x
e
x
ε 2 e2x
ε
e
x
ε 1 e2x
ε
5
1
e2x
ε 1 1
x e2x
ε 2 1
:
27
Appendix](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-36-320.jpg)
![Since
e2x
ε 2 1 $ 0 ifx $ 0
e2x
ε 2 1 , 0 ifx , 0
;
then
x e2x
ε 2 1
$ 0;
therefore
xtanh
x
ε
5
1
e2x
ε 1 1
x e2x
ε 2 1
$ 0;
and
xtanh
x
ε
5 xtanh
x
ε
5 x
j j tanh
x
ε
$ 0:
Lemma 1.2: [8] For every given scalar χAR and positive scalar ε, the
following inequality holds:
0 # χ
2 χtanh
χ
ε
# με; μ 5 0:2785: ðA2Þ
Lemma 1.3: [9] Let f; V: 0; N
½ ÞAR, then _
V # 2 αV 1 f; ’t $ t0 $ 0
implies that
VðtÞ # e2αðt2t0Þ
Vðt0Þ 1
ðt
t0
e2αðt2τÞ
fðτÞdτ
For any finite constant α.
According to [9], we have the proof as follows:
Let ωðtÞ9 _
V 1 αV 2 f , we have ωðtÞ # 0, and
_
V 5 2 αV 1 f 1 ω
implies that
VðtÞ 5 e2αðt2t0Þ
Vðt0Þ 1
ðt
t0
e2αðt2τÞ
fðτÞdτ 1
ðt
t0
e2αðt2τÞ
ωðτÞdτ:
Because ωðtÞ , 0 and ’t $ t0 $ 0, we have
VðtÞ # e2αðt2t0Þ
Vðt0Þ 1
ðt
t0
e2αðt2τÞ
fðτÞdτ:
28 CHAPTER 1 Basic sliding mode control principle and design](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-37-320.jpg)



![Therefore,
_
V 5 sðu 1 Δ 2 θ_
qÞ 1
1
γ
~
θ
_
^
θ
5 s ^
θ_
q 2 kss 2 η tanh
s
ε
1 Δ 2 θ_
q
1
1
γ
~
θð2 γ _
qsÞ
5 s ~
θ_
q 2 kss 2 η tanh
s
ε
1 Δ
2 ~
θð_
qsÞ
:
According to Eq. (1.26), we have
2ηs tanh
s
ε
# 2 η s
j j 1 ημε:
Then
_
V 5 2 kss2
2 η s
j j 1 ημε 1 ΔUs # 2 kss2
1 ημε:
If kss2
$ ημε, i.e., s
j j $
ffiffiffiffiffiffi
ημε
ks
q
, we have 2kss2
1 ημε # 0, i.e., _
V # 0, then
the convergence value is s
j j #
ffiffiffiffiffiffi
ημε
ks
q
, if ks is bigger enough, η and ε is
smaller enough, the convergence value will tend to be very smaller.
Since if V $ 0 and _
V # 0, we can get that if t-N, V is limited, and ^
θ is
limited.
In order to avoid ^
θ is too far from θ, and avoid control input value too
big, we use projection algorithm [1] instead of Eq. (2.12) as follows:
_
^
θ 5 Proj^
θð2γ _
qsÞ; ð2:13Þ
Proj^
θðUÞ 5
0 if ^
θ 5 θmax and U . 0
0 if ^
θ 5 θmin and U , 0
U otherwise
:
8
:
For adaptive law (2.13) and use switch function for (2.10), we have
1. if ^
θ 5 θmax and 2 γ _
qs . 0, set
_
^
θ 5 0, then ~
θ 5 ^
θ 2 θ . 0, γ _
qs , 0, we
have s~
θ_
q , 0, and
_
V 5 sð~
θ_
q 2 kss 2 ηsignðsÞ 1 ΔÞ
5 s~
θ_
q 2 kss2
2 η s
j j 1 ΔUs ,2 kss2
# 0
2. if ^
θ 5 θmin and 2γ _
qs , 0, set
_
^
θ 5 0, then ~
θ 5 ^
θ 2 θ , 0, γ _
qs . 0, we
have s~
θ_
q , 0, and
_
V 5 sð~
θ_
q 2 kss 2 ηsignðsÞ 1 ΔÞ
5 s~
θ_
q 2 kss2
2 η s
j j 1 ΔUs ,2 kss2
# 0
33
2.1 Adaptive Sliding Mode Control for Mechanical Systems With tanh Function](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-41-320.jpg)
![3. if
_
^
θ 5 2γ _
qs, then Eq. (2.13) is the same as Eq. (2.12), and we have
_
V # 2 kss2
# 0.
From _
V # 2 kss2
# 0, using LaSalle-Yoshizawa theorem [5], we have
lim
t-N
kss2
5 0
This is, when t-N; s-0.
From the above analysis, we can get _
V # 0 with adaptive law
(2.13), and ^
θ will be limited within θmin θmax
.
2.1.3 Simulation example
Consider a linear plant is
dx1
dt
5 x2
m
dx2
dt
5 uðtÞ 1 Δ
;
where m 5 1:0, Δ is the friction model and denoted as
Δ 5 0:5_
θ 1 1:5signð_
θÞ.
The desired trajectory is selected as sint, and the limit range of the parameter
θ is assumed as θmin 5 0:5 and θmax 5 1:5. Choose c 5 15, ks 5 150,
ε 5 0:05, γ 5 500 and η 5 D 1 0:01 5 2:01. Use adaptive sliding mode con-
troller (2.7). If the adaptive law is selected as Eq. (2.12) (M5 1), then the
simulation results are shown in Figs. 2.12.3. If the adaptive law is selected
as Eq. (2.13) (M5 2), then the simulation results are shown in Figs. 2.42.6.
0 5 10 15 20 25 30
–2
–1
0
1
2
time(s)
Position
tracking
Ideal position signal
Position signal tracking
0 5 10 15 20 25 30
–0.6
–0.4
–0.2
0
0.2
time(s)
Position
tracking
error
■ FIGURE 2.1 Position tracking based on adaptive law (2.12) (M 5 1).
34 CHAPTER 2 Sliding mode control with high performance](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-42-320.jpg)


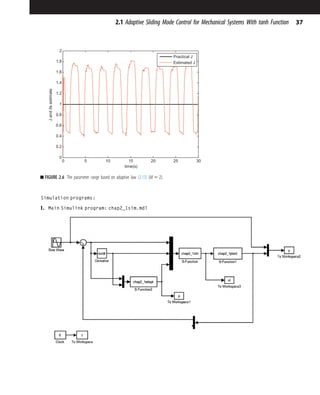
![2. Control law program: chap2_1ctrl..m
function [sys,x0,str,ts] 5 s_function(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
case 3,
sys 5 mdlOutputs(t,x,u);
case {1,2, 4, 9}
sys 5 [];
otherwise
error(['Unhandled flag 5 ',num2str(flag)]);
end
function [sys,x0,str,ts] 5 mdlInitializeSizes
sizes 5 simsizes;
sizes.NumContStates 5 0;
sizes.NumDiscStates 5 0;
sizes.NumOutputs 5 1;
sizes.NumInputs 5 3;
sizes.DirFeedthrough 5 1;
sizes.NumSampleTimes 5 1;
sys 5 simsizes(sizes);
x0 5 [];
str 5 [];
ts 5 [0 0];
function sys 5 mdlOutputs(t,x,u)
e 5 u(1);
de 5 u(2);
dxd 5 cos(t);
ddxd 5 2sin(t);
thp 5 u(3);
c 5 15;
s 5 de 1 c*e; %Sliding Mode
x2 5 dxd 1 de;
dq 5 ddxd 2c*de;
ks 5 150;
xite 5 2.01;
epc 5 0.05;
ua 5 thp*dq;
us1 5 2ks*s;
us2 5 2xite*tanh(s/epc);
ut 5 ua 1 us1 1 us2;
sys(1) 5 ut;
38 CHAPTER 2 Sliding mode control with high performance](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-46-320.jpg)
![3. Plant S function: chap2_1plant.m
function [sys,x0,str,ts] 5 s_function(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
case 1,
sys 5 mdlDerivatives(t,x,u);
case 3,
sys 5 mdlOutputs(t,x,u);
case {2, 4, 9}
sys 5 [];
otherwise
error(['Unhandled flag 5 ',num2str(flag)]);
end
function [sys,x0,str,ts] 5 mdlInitializeSizes
sizes 5 simsizes;
sizes.NumContStates 5 2;
sizes.NumDiscStates 5 0;
sizes.NumOutputs 5 2;
sizes.NumInputs 5 1;
sizes.DirFeedthrough 5 1;
sizes.NumSampleTimes 5 0;
sys 5 simsizes(sizes);
x0 5 [0.5;0];
str 5 [];
ts 5 [];
function sys 5 mdlDerivatives(t,x,u)
m 5 1.0;
ut 5 u(1);
F 5 0.5*x(2) 1 1.5*sign(x(2));
sys(1) 5 x(2);
sys(2) 5 1/m*(ut 2 F);
function sys 5 mdlOutputs(t,x,u)
m 5 1.0;
sys(1) 5 x(1);
sys(2) 5 m;
4. Adaptive law function: chap2_1adapt.m
function [sys,x0,str,ts] 5 s_function(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
39
2.1 Adaptive Sliding Mode Control for Mechanical Systems With tanh Function](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-47-320.jpg)
![case 1,
sys 5 mdlDerivatives(t,x,u);
case 3,
sys 5 mdlOutputs(t,x,u);
case {2, 4, 9}
sys 5 [];
otherwise
error(['Unhandled flag 5 ',num2str(flag)]);
end
function [sys,x0,str,ts] 5 mdlInitializeSizes
sizes 5 simsizes;
sizes.NumContStates 5 1;
sizes.NumDiscStates 5 0;
sizes.NumOutputs 5 1;
sizes.NumInputs 5 2;
sizes.DirFeedthrough 5 1;
sizes.NumSampleTimes 5 0;
sys 5 simsizes(sizes);
x0 5 [0];
str 5 [];
ts 5 [];
function sys 5 mdlDerivatives(t,x,u)
e 5 u(1);
de 5 u(2);
dxd 5 cos(t);
ddxd 5 2sin(t);
x2 5 dxd 1 de;
c 5 15;
gama 5 500;
s 5 de 1 c*e;
thp 5 x(1);
dq 5 ddxd 2 c*de;
th_min 5 0.5;
th_max 5 1.5;
alaw 5 2gama*dq*s; %Adaptive law
M 5 1;
if M 55 1 %Adaptive law
sys(1) 5 alaw;
elseif M 55 2 %Adaptive law with Proj
40 CHAPTER 2 Sliding mode control with high performance](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-48-320.jpg)

![Define the error performance function as
λðtÞ 5 ðλð0ÞÞ 2 λNexpð2 ltÞ 1 λN; ð2:15Þ
where l . 0; 0 , eð0Þ
, λð0Þ; λN . 0; λN , λð0Þ.
Then λðtÞ . 0 and λðtÞ tend to λN exponentially.
2.2.2 Prescribed error performance design
Theorem 2.1: [24]: In order to ensure fast convergence of tracking
error, and achieve a certain convergence accuracy, tracking error is set as
eðtÞ 5 λðtÞSðεÞ: ð2:16Þ
Then the prescribed error performance function can be defined as
SðεÞ 5
eðtÞ
λðtÞ
: ð2:17Þ
The function SðεÞ must satisfied as
1. SðεÞ is smooth continuous and monotone increasing function;
2. 21 , SðεÞ , 1;
3. limε-1NSðεÞ 5 1 and limε-2NSðεÞ 5 2 1.
According to the above requirements, SðεÞ can be designed as follows:
SðεÞ 5
expðεÞ 2 expð2εÞ
expðεÞ 1 expð2εÞ
: ð2:18Þ
Since 21 , SðεÞ , 1, from λðtÞ definition, we have
2λðtÞ , λðtÞSðεÞ , λðtÞ, i.e.,
2λðtÞ , eðtÞ , λðtÞ:
We can then get the tracking error set as
Ξ 5 feAR: jeðtÞj , λ’t $ 0 and jeðtÞj , λNfor t-Ng: ð2:19Þ
2.2.3 Controller design and analysis
According to the properties of the hyperbolic tangent function, the
inverse function of SðεÞ is
ε 5
1
2
ln
1 1 S
1 2 S
5
1
2
ln
1 1
e
λ
1 2
e
λ
5
1
2
ln
λ 1 e
λ 2 e
5
1
2
ðlnðλ 1 eÞÞ 2 lnðλ 2 eÞ:
42 CHAPTER 2 Sliding mode control with high performance](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-50-320.jpg)



![Simulation programs:
1. Main Simulink program: chap2_2sim.mdl
2. Control law program: chap2_2ctrl..m
function [sys,x0,str,ts] 5 spacemodel(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts] 5 mdlInitializeSizes;
case 3,
sys 5 mdlOutputs(t,x,u);
0 5 10 15 20 25 30
–80
–60
–40
–20
0
20
40
time(s)
Control
input
■ FIGURE 2.10 Control input.
46 CHAPTER 2 Sliding mode control with high performance](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-54-320.jpg)

![the present State Coaches of the Archbishop of Canterbury and the
Speaker of the House of Commons[349]
.
It cannot be any matter of surprize, after so luxurious a
conveyance had found its way into the Royal Establishment, that it
should be adopted by others who could support the expence, when
not curbed by sumptuary laws; and we have accordingly seen, that
Coaches prevailed much, early in the Reign of King James; but
Hackney Coaches, which are professedly the Subject of this Memoir,
waited till luxury had made larger strides among us, and till private
Coaches came to market at second hand.
Hackney Coach.
There having always been an imitative luxury in mankind, whereby
the inferior orders might approximate the superior; so those that
could not maintain a Coach de die in diem contrived a means of
having the use of one de horâ in horam. Hence arose our occasional
Vehicles called Hackney Coaches.
The French word Haquenée[350]
implies a common horse for all
purposes of riding, whether for private use or for hire; generally an
ambler, as distinguished from the horses of superior orders, such as
the palfrey and the great horse. The former of these are often called
pad-nags, and were likewise amblers; while horses for draught were
called trotting-horses[351]
: so that the Haquenée was in fact, and in
his use, distinct from all the rest, and inferior in rank and quality.
This term for an ambling-nag occurs in Chaucer[352]
. Thus we
obtained our Haquenée or Hackney Horses long before we had any
Coaches to tack to them; and the term had likewise, at the same
time, made its way into metaphor, to express any thing much and
promiscuously used. Thus Shakspeare, who never lived to ride in a
Hackney Coach, applies the word Hackney to a common woman of
easy access[353]
: and again, in the First Part of Henry IV. (Act iii. Sc.
4), the King says to the Prince of Wales,](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-56-320.jpg)
![Had I so lavish of my presence been,
So common-hackneyed in the eyes of men,
So stale and cheap to vulgar company, c.
Now Shakspeare died in the year 1616; whereas Hackney Coaches
were not known, in the Streets at least, till about the year 1625[354]
.
Though the term Haquenée is French, it is not used in France for
Coaches of a like kind; yet, after we had adopted the word as
applied to horses of the common sort, it was easy to put them in
harness, for the service of drawing, and the convenience of the
Inhabitants of the Metropolis; whereby the word Hackney became
transferred to the whole Equipage, then in want of a differential
name; whereof the Coach, being the more striking part, obtained the
name by pre-eminence.
Before I return to my subject, give me leave to add a word or two
on the French Coaches of a similar nature, which are called
Fiacres[355]
. The term is thus accounted for, though I did not suspect
I should have found the meaning in a Martyrology. Fiacre was the
name of a Saint, whose Portrait, like those of many other famous
men of their times both in Church and State, had the honour to
adorn a Sign-Post; and the Inn in Paris, Rue St. Antoine, from which
these Coaches were first let out to hire on temporary occasions, had
the Sign of St. Fiacre, and from thence they took their name. M.
Richelet, in his Dictionary[356]
, tells us, that a Fiacre is Carosse de
loüage, auquel on a donné ce nom à cause de l'Enseigne d'un logis
de la Rue St. Antoine de Paris ou l'on a premierement löué ces
sortes de Carosse. Ce logis avoit pour Enseigne un Saint Fiacre. As
to the Saint himself, he was no less a personage than the second
Son, and at length Heir, of Eugenius IV. King of Scots, who lived in
the Seventh Century. He went into France, took a religious habit,
refusing the Crown of Scotland some years afterwards, on his
Brother's death; and, when he died, was canonized. There is a
Chapel dedicated to him at St. Omer's. His death is commemorated
on the 30th of August[357]
.](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-57-320.jpg)
![As to the time when the French Fiacres first came into use, we are
led pretty nearly to it by Mr. Menage, who, in his Origines de la
Langue Françoise, published in Quarto, 1650, speaks of them as of
a late introduction. His words are, On appelle ainsi [Fiacre] à Paris
depuis quelques années un Carosse de loüage. He then gives the
same reason as we find in Richelet: but the words depuis quelques
Années shew, that those Coaches had not then been long in use,
and are to be dated either a little before or a little after our own;
insomuch that it is probable the one gave the example to the other,
allowing Mr. Menage credit for twenty-five years, comprehended in
his expression of quelques Années[358]
.
But to return to our Hackney Coaches, which took birth A. D. 1625
(the first year of King Charles I.); and either began to ply in the
Streets, or stood ready at Inns to be called for if wanted: and at that
time did not exceed twenty in number[359]
. But, as luxury makes
large shoots in any branch where it puts forth, so we find that, in no
more than ten years, this new-planted scyon had grown so much as
to require the pruning-knife; for that the Street Coaches had become
in reality a national nuisance in various particulars: and accordingly a
Proclamation issued A.D. 1635 in the following words:
That the great numbers of Hackney Coaches of late time
seen and kept in London, Westminster, and their Suburbs, and
the general and promiscuous use of Coaches there, were not
only a great disturbance to his Majesty, his dearest Consort the
Queen, the Nobility, and others of place and degree, in their
passage through the Streets; but the Streets themselves were
so pestered, and the pavements so broken up, that the common
passage is thereby hindered and made dangerous; and the
prices of hay and provender, and other provisions of stable,
thereby made exceeding dear: Wherefore we expressly
command and forbid, That, from the Feast of St. John the
Baptist next coming, no Hackney or Hired Coaches be used or
suffered in London, Westminster, or the Suburbs or Liberties
thereof, except they be to travel at least three miles out of](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-58-320.jpg)
![London or Westminster, or the Suburbs thereof. And also, that
no person shall go in a Coach in the said Streets, except the
owner of the Coach shall constantly keep up Four able Horses
for our Service, when required[360]
. Dated January 19, 1635-6.
This Proclamation, so long as it was observed, must have put a
considerable check to the use of these Carriages; nor can I think it
could operate much in the King's favour, as it would hardly be worth
a Coach-Master's while to be at so great a contingent charge as the
keeping of Four Horses to be furnished at a moment's warning for
his Majesty's occasional employment. We are to construe this, then,
as amounting to a prohibition, on account of the certain expence
which must follow an uncertain occupation. The nature of this
penalty, as I may call it, was founded on the Statute of Purveyance,
not then repealed.
But there was another co-operating cause that suspended the use
of Coaches for a short time, which was the introduction of the
Hackney Chairs, which took place a very little while before the
Proclamation. They arose from the incommodities stated in the Royal
Edict, and, no doubt, tended in some measure towards the
suppression of the Hackney-Coaches; till by degrees being found
incompetent to answer all their seemingly intended purposes, we
shall see the Coaches, in about two years time, return into the
streets, and resume their functions. But to proceed with the History
of the Chairs. At the critical time, then, when Government was
devising measures to prevent the increase of Coaches as much as
possible, for the reasons alleged in the Proclamation, there stepped
in a Knight, by name Sir Saunders Duncombe, a Gentleman-
Pensioner, and a travelled man, who proposed the introduction of
Chairs, after the model he had seen abroad[361]
. This was in the year
1634; when Sir Saunders obtained an exclusive Patent for the
setting them forth for hire, dated the first day of October, for the
term of fourteen years. The number is not specified, but left perhaps
indefinite, it being impossible to say what would be necessary in a
new device of this sort, tending to be beneficial to the introductor, as](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-59-320.jpg)

![Successors, do give and grant, unto the said Sir Sanders
Duncombe, his Executors, Administrators, and Assigns, and to
his and their, and every of their, Deputy and Deputies, Servants,
Workmen, Factors, and Agents, and to all and every such
person and persons as shall have power and authority from him,
them, or any of them, in that behalf, full and free Licence,
Privilege, Power, and Authority, that they only, and none other,
shall or may, from time to time, during the term of fourteen
years hereafter granted, use, put forth, and lett to hire, within
our said Cities of London and Westminster, and the Suburbs and
Precincts thereof, or in any part of them, or any of them, the
said covered Chairs, to be carried and borne as aforesaid.
Witness Ourself at Canbury, the First day of October[362]
.
The place principally hinted at in the above Grant, or Patent,
seems to have been the City of Sedan in Champagne; where, we are
at liberty to suppose, these covered Chairs being most in use, they
obtained with us the name of Sedan Chairs, like the local names of
Berlin and Landau[363]
.
These new Vehicles, hitherto unseen in our orbit, had, doubtless,
patrons among the beaus and fine gentlemen of the age; though, in
their general utility, they manifestly could not be so commodious as
Coaches, were it for no other reason than that they could carry but
one person. They might prevail with persons of a certain rank and
description; but the opulent Merchant, and others in a similar line of
family life, still were in want of a conveyance of greater capacity; a
circumstance which would depress the Chairs, and gradually hasten
the re-introduction of the Coaches, and which, as has been
observed, took place accordingly in little more than two years. The
following special commission was therefore granted by the King, A.
D. 1637, wherein the number of the Coaches seems rather to have
enlarged, and the management of them was placed in the
department of the Master of the Horse. It runs essentially in the
following words:](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-61-320.jpg)
![That we, finding it very requisite for our Nobility and Gentry,
as well as for Foreign Ambassadors, Strangers, and others, that
there should be a competent number of Hackney Coaches
allowed for such uses, have, by the advice of our Privy Council,
thought fit to allow Fifty Hackney Coachmen in and about
London and Westminster; limiting them not to keep above
Twelve Horses a-piece. We therefore grant to you [the Marquis]
during your Life, the Power and Authority to license Fifty
Hackney Coachmen, who shall keep no more than Twelve good
Horses each, for their, or any of their, Coach and Coaches
respectively. You also hereby have Power to license so many in
other Cities and Towns of England as in your wisdom shall be
thought necessary; with power to restrain and prohibit all others
from keeping any Hackney Coach to let to hire, either in London
or elsewhere. Also to prescribe Rules and Orders concerning the
daily Prices of the said licensed Hackney Coachmen, to be by
them, or any of them, taken for our own particular service, and
in their employment for our Subjects; provided such orders be
first allowed by us, under our Royal Hand.[364]
We may observe that the article of Purveyance is here very gently
touched upon, and confined to a sign-manual. Mr. Anderson
supposes that there must have been many more than fifty Coaches
introduced by the above allowance of twelve horses; but it seems
rather to imply that no Coach-Master should engross more than six
Coaches to himself. This also might be a tacit mode of preserving a
supply of horses to be purveyed for the King when necessary.
One may collect from hence that private Coaches were sparingly
kept, by the mention of the Nobility and Gentry.
Hitherto we have found the Hackney Coaches under the regulation
of the Crown, or its immediate Officers; but we are now to look for
them at a time when the Monarchical Government was suspended,
during the Protectorate. Whether the Master of the Horse received
any emolument from granting the above Licences, is not apparent;
but under the Commonwealth we find that the Coaches became](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-62-320.jpg)
![subject to a tax towards the expence of their regulation; for by an
Act of Oliver's Parliament, A. D. 1654, the number of such Coaches,
within London and Westminster, was enlarged to two hundred[365]
.
The outlying distance was also augmented to six miles round the
late lines of communication, as the Statute expresses it; by which I
conceive that the greatest distance was extended to nine miles,
including the three prescribed, or rather enjoined, by the regulating
proclamation of King Charles I. in the year 1635. By this Act of
Oliver's Parliament, the government of the Hackney Coaches, with
respect to their stands, rates, c. was placed in the Court of
Aldermen of London; and as, of course, this new business would
require Clerks, and other officers, to supervise it, the Coach-Masters
were made subject to the payment of twenty shillings yearly for
every such Coach.
Here we have brought the Coaches under a Police similar to that
of our own time; but it did not long remain in the hands of the
Corporation; for in the year after the Restoration, the establishment
was new-modelled by an Act of the 13th and 14th of King Charles II.
1661, wherein it is specified that no Coaches were to be used
without a Licence,—who may be entitled to such Licences,—that the
number shall not exceed 400,—what shall be the rates,—with
penalties for exacting more[366]
.
Each of these four hundred Coaches so licensed was obliged to
pay annually five pounds for the privilege, to be applied towards the
keeping in repair certain parts of the streets of London and
Westminster[367]
; a very rational appropriation of such fund, for who
ought so much to contribute to the amendment of the streets, as
those who lived by their demolition?
Nex Lex æquior ulla, quam, c.
Within a few years after the Revolution (anno 5 Gul. et Mar. ch.
xxii.) the number of Coaches arose to seven hundred, each of which
paid to the Crown annually four pounds. This, primâ facie, one
would suppose was a relief to the Coach-Masters, and that the
reduction in the impost accrued from the number; but that was not](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-63-320.jpg)
![the case, for every Owner, for each Coach, was constrained to pay
down fifty pounds for his first Licence for twenty-one years, or
forego his employment; which seeming indulgence was, in fact,
paying five pounds per annum for that term; whereas, probably, the
Coach-Master would rather have continued at the former five
pounds, and have run all risks, than have purchased an exclusive
privilege, in the gross, at so high a price.
The finances, and even the resources, of Government, must have
been very low at this moment, or Ministry could never have stooped
to so paltry and oppressive an expedient, to raise so small a sum as
would arise from these Licences. By the increase of the number of
Coaches from four hundred at five pounds per annum, to seven
hundred at four pounds per annum, the gain to the Treasury was
£.800 annually:—and what did the licences at fifty pounds each
Coach, for the term of twenty-one years, yield to the State?—
£.3,500! Whereas, had such lease of the privilege of driving a Coach
been kept at the rack rent of five pounds per annum, it had
produced in that period £.14,700.
Thus, however the matter rested, till the ninth year of Queen
Anne, 1710, when a Statute was made, which brought the business
to its present standard, with a few variations, which will be observed
in the order of time. By this Act every circumstance was new
modelled; for thereby the Crown was impowered to appoint five
Commissioners for regulating and licensing both Hackney Coaches
and Chairs, from the time the late Statute of the fifth of William and
Mary should expire, viz. at Midsummer A. D. 1715, authorizing such
Commissioners to grant licences to eight hundred Hackney Coaches
from that time for the term of thirty-two years, which should be
allowed to be driven in the Cities of London and Westminster, and
the Suburbs thereof, or any where within the Bills of Mortality; each
Coach paying for such privilege the sum of five shillings per
week[368]
. It was at the same time enacted, that from the 24th of
June, 1711, all horses to be used with an Hackney Coach shall be
fourteen hands high, according to the standard; and further, that
every Coach and Chair shall have a mark of distinction, by figure or](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-64-320.jpg)
![otherwise, as the Commissioners shall think fit; and the said mark
shall be placed on each side of every such Coach and Chair
respectively, in the most convenient place to be taken notice of, to
the end that they may be known if any complaints shall be made of
them[369]
.
This was all that could then be done respecting the Coaches,
forasmuch as the old term of twenty-one years, granted in the fifth
year of William and Mary, 1694, was subsisting, whereby seven
hundred Coaches were allowed, and for which privilege the Owners
had paid fifty pounds each, on whom Government shewed some
tenderness. With regard, however, to regulation, c. there was, no
doubt, room sufficient for the exercise of the powers given to the
Commissioners. There was, likewise, another object involved in this
Statute; viz. the Chairs, which were not comprehended in the same
agreement and contract with the Coaches, but were open
immediately to new laws. Therefore under the same commissions
was placed the management and licensing of the Hackney Chairs, to
commence from the 24th of June in the following year, 1711, for the
said term of thirty-two years; which were thereby limited to the
number of two hundred, each paying for such licence the annual
sum of ten shillings[370]
. As the number of both Coaches and Chairs
was enlarged, whereby many new persons would come forward,
perhaps to the ousting of the old Coach-Masters and Chair-Masters,
it is required by this Act that the Commissioners shall give a
preference to such of the Lessees, as I may call them, whose terms
had not then expired, whether the right remained in themselves or
their widows, if they applied within a given time[371]
.
By this statute likewise the rates were limited to time and
distance, at ten shillings by the Day.—One shilling and six pence for
the first Hour, and one shilling for every succeeding Hour.—One
shilling for the distance of a mile and a half.—One shilling and six
pence for any distance more than a mile and a half, and not
exceeding two miles; and so on, in the proportion of six pence for
every succeeding half mile.](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-65-320.jpg)
![The Chairs are likewise at the same time rated at two-thirds of the
distance prescribed to the Coaches, so that they were allowed to
take one shilling for a mile, and six pence for every succeeding half
mile.
Though the time of waiting is not specified in the Act with regard
to the Chairs, yet it follows, by implication, to be intended the same
as the Coaches. These have been altered by a very late Statute,
1785. It is well known that it is left in the option of either Coachmen
or Chairmen, whether they will be paid by the distance or the time,
which is but a reasonable privilege; but there is another
circumstance, not generally known, of which the passengers are not
perhaps aware, viz. that if the room which a Coach will occupy in
turning about should exceed the distance allowed, the Coachman is
entitled to a larger fare, that is, as much as if he had gone another
half mile. The doctrine is the same respecting Chairs, and the room
allowed is eight yards in the case of a Coach, and four yards in the
case of a Chair. As the Statute gives all competent allowances to the
Coachmen and Chairmen, so it was requisite, on the other hand, to
make the contract obligatory, and that each of them should be
compellable to perform their parts; and therefore, to do this, and at
the same time to prevent extortion, it became necessary to add a
severe penal clause, viz. that if any Hackney-Coachman or
Chairman shall refuse to go at, or shall exact more for his hire than,
the several rates hereby limited, he shall, for every such offence,
forfeit the sum of forty shillings. These penalties were, by this Act,
to have gone in the proportion of two-thirds to the Queen, and one-
third to the Plaintiff. [Since made half to the Crown and half to the
Complainant.] The Coachmen and Chairmen are thereby likewise
liable to be deprived of their Licences for misbehaviour, or by giving
abusive language[372]
. On the other hand, that the Coachmen and
Chairmen might have a remedy in case of refusal to pay them their
just fare, any Justice of the Peace is impowered, upon complaint, to
issue a warrant to bring before him the Recusant, and to award
reasonable satisfaction to the party aggrieved, or otherwise to bind
him over to the next Quarter-Session, where the Bench is](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-66-320.jpg)
![empowered to levy the said satisfaction by distress. The Act
proceeds to other matters touching the Commissioners themselves,
c.; and then states, that whereas by a Statute of the 29th of
Charles II. the use of all Hackney Coaches and Chairs had been
prohibited on Sundays, it gives full power both to stand and to ply as
on other days.[373]
This is the substance of the Act before us; but it may here be
observed, that in the 10th year of the Queen, 1711, one hundred
more Chairs were added by Statute, subject to the same regulations
as the rest, being found not only convenient but necessary; as the
number of Coaches, consistently with Public Faith, could not be
enlarged till the year 1715, when the old term of twenty-one years
should have expired.
Before all the provisions in the Act of the year 1710, referred to
the future period of 1715, could take place, a demise of the Crown
intervened, A. D. 1714, by which all such clauses, which extended to
a future time, were of course become a nullity.
By Act 12 George I. chap. 12, the number of Chairs was raised to
400, on account of the increase of Buildings Westward.[374]
* * * * * * * *
The Hammer Cloth.
To shew how trifling, though necessary conveniences, arise to
great and expensive luxuries, let us remark the original insignificant
appendage of what we call the Hammer Cloth. It was requisite that
the Coachman should have a few implements in case of accidents, or
a sudden and little repair was wanting to the Coach; for which
purpose he carried a hammer with a few pins, nails, c. with him,
and placed them under his seat, made hollow to hold them, and
which from thence was called the Coach Box; and, in a little time, in
order to conceal this unsightly appearance, a cloth was thrown over
the box and its contents, of which a hammer was the chief, and](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-67-320.jpg)

![Articles of Dress.
GLOVES.
About the year 790, Charlemagne granted an unlimited right of
hunting to the Abbot and Monks of Sithin, for making their Gloves
and Girdles of the Skins of the Deer they killed, and Covers for their
Books. [Mabillon de Re Diplom. p. 611. Grose.]
Anciently richly adorned and decorated with precious Stones,—as
in the Rolls of Parliament, anno 53 Hen. III. A. D. 1267. Et de 2
Paribus Chirothecarum cum lapidibus. [Warton's History of Poetry,
vol. I. p. 182, note. Grose.]
Edward Vere, Earl of Oxford, according to Mr. Walpole's account,
on the authority of Stowe,—having travelled into Italy, is recorded
to have been the first that brought into England embroidered Gloves
and Perfumes; and presenting the Queen [Elizabeth] with a Pair of
the former, she was so pleased with them, as to be drawn with them
in one of her Portraits. [Royal and Noble Authors, vol. i. p. 159.
Note to Winter's Tale, edit. Johnson and Steevens, 1778, p. 388.]
Give Gloves to the Reapers, a Largesse to cry.
[Tusser, v. Hist. of Hawsted. 190.]
The Monastery of Bury allowed its Servants two pence apiece for
Glove-Silver in Autumn. [Hist. of Hawsted. 190.]
The rural Bridegroom, in Laneham's (or Langham's) Account of
the Entertainment of Queen Elizabeth at Kenelworth Castle, 1575,
had—a Payr of Harvest Gloves on his Hands, as a sign of good
Husbandry. Id. in eod.
When Sir Thomas Pope, the Founder of Trinity College, Oxford,
visited it, 1556, The Bursars offered him a present of embroidered](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-69-320.jpg)
![Gloves. [Warton's Life of Sir Thomas Pope, p. 119.]
When Sir Thomas Pope had founded the College, the University
complimented him with a Letter of Thanks, which was accompanied
with a Present of rich Gloves, 1556. [Warton's Life, p. 132, note.]
The Gloves were sent both to himself and Lady, and cost 6s. 8d. [Id.
in eod.]
After the death of Sir Thomas Pope, his Widow married Sir Hugh
Powlett; on which occasion the College presented her, as the Wife of
the Founder, with a Pair of very rich Gloves, the charge for which
runs—Pro Pari Chirothecarum dat. Dom. Powlett et Domine
Fundatrici, xvi s. Idem, p. 185. See also p. 191, ubi sæpe; and p.
411. Pro Chirothecis Magistri Pope, xxxii s.
An article charged in the Bursar's books of Trinity College, Oxford,
is pro fumigatis Chirothecis. [Warton.] These were often given to
College-Tenants, and Guests of Distinction; but this fell into disuse
soon after the Reign of Charles I. Idem. [Grose.]
George Clifford, Earl of Cumberland, received a Glove from Queen
Elizabeth. The Queen had dropped it, when he taking it up to return
to her, she presented it to him as a mark of her esteem. He adorned
it with Jewels, and wore it in the front of his Hat on days of
Tournaments. It is expressed in a print of him by Robert White.
[Bray's Tour, p. 319.]
See for Gloves worn in Hats, Old Plays, vol. ii. p. 132, second
edition: King Lear, act iii. sc. 4. edit, 1778 by Johnson and Steevens.
N. B. Such Tokens as these were called Favours[375]
, from whence
we derive the term for Ribbons given on Weddings. I presume they
are supposed to be given by the hand of the Bride.
Dr. Glisson, in his last visit to Queen Elizabeth, received from her a
Pair of rich Spanish leather Gloves, embossed on the backs and tops
with gold embroidery, and fringed round with gold plate. The Queen,
as he tells us, pulled them from her own Royal Hands, saying, Here,
Glisson, wear them for my sake. Life of Corinna (or Mrs. Eliz.
Thomas), p. xxxi.](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-70-320.jpg)
![Perfumed Gloves[376]
; v. supra.
These Gloves the Count sent me; they are an excellent Perfume.
Much Ado about Nothing, act ii. sc. 4.
Gloves given at Weddings. Old Plays, vol. v. p. 8.
A Glove hung up in a Church, as a public Challenge. Gilpin's Life of
Bernard Gilpin, by Mr. Gilpin, p. 179.
Swearing by Gloves, in jocular conversation, very common. Aye,
by these Gloves! is an expression I have somewhere seen.
Ladies' Sleeves, as well as Gloves, were worn as tokens of
Gallantry. Vide Troil. and Cress, act. v. sc. 2. edit. Johnson and
Steevens, 1778.
Gifts that admitted of it (especially to Women from Men) were
usually worn on the Sleeve.
I knew her by this Jewel on her Sleeve.
Love's Labour Lost, act v. sc. 1.
Fairings, and such Tokens, were of this sort. Hence the Question
and Answer.
Q. What have you brought me? (from the Fair, c.)
A. A new nothing, to pin on your Sleeve.
Hence also to pin one's Faith upon another's Sleeve.
Wear my Heart upon my Sleeve.
Othello, act i. sc. 1.
F. Grose, Esq. to S. Pegge, F. S. A.
September 4, 1784.](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-71-320.jpg)
![Gentlewomen's Apparel.
What we call Ermine is an erroneous conception, for we give the
name to White Fur tufted with Black, whereas it is the Black only
that is properly Ermine, of which numberless instances may be
produced, and this is one.
Powderings on her Bonnet.—This may require an explanation to
those who are unacquainted with the language of that age. What we
call Ermine, is a compound, which will bear a little analysis, for it is
formed of the Fur of one animal, and the tip of the Tail of another.
The White Ground is, properly speaking, Minever, so called from a
Russian animal of that name. [v. Philips's Dictionary, in voce.] The
Ermine is the Armenian Mouse, the tip of whose Tail is Black, which
being placed as a falling tuft upon the Minever, forms what we
collectively call Ermine, the value of which is enhanced the more, as
one animal can afford but one tuft. [v. Bailey's Dict, in voce.] Every
one of these tufts is termed a Powdering.
The Heralds make a distinction between the singular Ermine, and
the Plural, Ermines; the latter, in their language, importing Black
powdered with White: and they go into still more minute
modifications, Erminois, c.
Apparel for the Heads of Gentlewomen.
First, none shall wear an Ermine, or Lettice-Bonnet, unless she be
a Gentlewoman born, having Arms.
Item, a Gentleman's Wife, she being a Gentlewoman born, shall
wear an Ermine or Lettice Bonnet, having one Powdering in the Top.
And if she be of honourable stock, to have two Powderings, one
before another, in the Top.
Item, an Esquire's Wife to have two Powderings.
Item, an Esquire's Wife for the Body to wear five Powderings; and
if she be of great Blood, two before, which maketh seven.](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-73-320.jpg)
![Item, a Knight's Wife to wear on her Bonnet, seven Powderings,
or eight at the most, because of higher Blood, as before.
Item, a Banneret's Wife to wear ten Powderings.
Item, a Baron's Wife thirteen.
Item, a Viscount's [Wife] to wear eighteen.
Item, a Countess to wear twenty-four. And above that Estate the
number convenient, at their pleasures.
Ex Bibl. Harl. No. 1776. fol. 31. b.
MOURNING.
The French Queens, before the Reign of Charles VIII. wore White
upon the death of the King; and were called Reines Blanches. It
was changed to Black on the death of Charles VIII. 1498. [See P.
Dan. Hist. iv. 590.]
In a Wardrobe account for half a year, to Lady-day 1684 (a MS.
purchased by Mr. Brander at the sale of the Library of Geo. Scot,
Esq. of Woolston-Hall, 1781), are the following entries for the King's
Mourning.
A Grey Coat lined with Murrey and White flowered Silk, with Gold
Loops, and four Crape Hat-bands.
Again, A Sad-coloured Silk Coat, lined with Gold-striped
Lutestring, with Silver-and-Silk Buttons; and a Purple Crape
Hatband.
Again, A Purple Coat.
The Emperor Leopold, who died 1705, never shaved his Beard
during the time of Mourning, which often lasted for a long time.
[Bancks's Hist. of Austria, p. 277.]
The Empress-Dowagers never lay aside their Mourning, and even
their Apartments are hung with Black till their deaths. [Bancks's Hist.](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-74-320.jpg)
![of Austria, p. 400. He says this from Baron Polnitz's Memoirs, vol. iv.
p. 46.]
The Bavarian Family never give a Black Livery, or line their
Coaches, in the deepest Mourning. [Polnitz, i. letter 22.]
The Pope's Nieces never wear Mourning, not even for their nearest
Relations; as the Romans reckon it so great a happiness for a Family
to have a Pope in it, that nothing ought to afflict his Holiness's
kindred. [Polnitz's Memoirs, ii. letter 33.]
Queen Anne, on the death of Prince George of Denmark, wore
Black and White, with a mixture of Purple in some part of her Dress.
The precedent was taken from that worn by Mary Queen of Scots for
the Earl of Darnley, which was exactly in point. [Secret History of
England, ii. 299.]
King Charles I. put the Court into Mourning for one Day on the
death of the Earl of Portland (Richard Weston), Lord High Treasurer.
[Stafford's Letters, i. 389.]
BEARD, c.
CHARLES I.[377]
—WILLIAM I.
Mrs. Thomas's Great Grand-Father was Mr. Richard Shute, a
Turkey Merchant, one of the Members for the City of London, and
much favoured by King Charles I. who gave him the Name of Sattin-
Shute, by way of distinction from another Branch of the same Name
and Family, and from his usually wearing a Sattin Doublet cut upon
White Taffata.
Without doubt, says Mrs. Thomas (for she was her own
Biographer), he was very nice in the mode of that Age, his Valet
being some hours every morning in starching his Beard, and curling
his Whiskers; but, continues she, during that time a Gentleman,
whom he maintained as a Companion, always read to him on some
useful subject. He lived in Leaden-Hall Street, the site on which
stands the India House, and had a Country-seat at Berking, in Essex.](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-75-320.jpg)



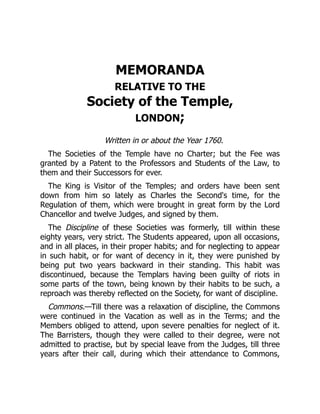

![the same time obliged to pay for full Commons. They judged
expulsion too mild a punishment.
The Old Hall stood on the South side of Pump Court, which, upon
building a new one, was converted into Sets of Chambers; and
which, by Order of Queen Elizabeth, were not to exceed eight in
number. This was soon after pulled down, and Chambers built in its
stead.
Library.—Left by Will to the Society, by Astley, a Bencher of it. It
contains about Nine Thousand Volumes. Besides this, he left a Set of
Chambers, value three hundred pounds, for the maintenance of a
Librarian, who at first was a Barrister; but, not being thought worth
their acceptance, it is now in the Butler.
Present Hall.—Built by Plowden, who was seven years in
perfecting it. He was three years Treasurer successively; and after
he quitted the Treasurership, he still continued the direction of the
Building.
The Temple Organ was made by Smith. The Societies, being
resolved to have a good Organ, employed one Smith and one Harris
to make each of them an Organ, value five hundred pounds; and
promised that they would give seven hundred pounds for that which
proved the best. This was accordingly done, and Smith's was
preferred and purchased. The other, made by Harris, was sold to
Christ-Church in Dublin; but, being afterwards exchanged for
another made by Byfield for four hundred pounds difference, it was
sold by Byfield to the Church at Woolwich[378]
.
Inns of Chancery, like the Halls at Oxford.
New-Inn belongs to the Middle Temple; and at the expiration of a
long lease, the Fee Simple will be vested in us.](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-82-320.jpg)
![Simnel.
Simnel.—Siminellus from the Latin Simila, which signifies the
Finest Part of the Flour. Panis similageneus, Simnel Bread. It is
mentioned in 'Assisa Panis;' and is still in use, especially in Lent.
Bread made into a Simnel shall weigh two shillings less than Wastell
Bread. Stat. 51 Henry III.
The Statute, intituled Assisa Panis et Cervisiæ, made Anno 51
Hen. III. Stat. I.; and Anno Dom. 1266. Cotton MS. Claudius, D. 2.
... Panis verò de siminello ponderabit minus de Wastello de
duobus solidis, quia bis coctus est.
For the Ordinance for the Assise and Weight of Bread in the City of
London, see Stowe's Survey, p. 740, Edit. 1633.
It was sometime called Simnellus, as in the Annals of the Church
of Winchester, under the year 1042. Rex Edwardus instituit, et cartâ
confirmavit, ut quoties ipse vel aliquis Successorum suorum Regum
Angliæ diadema portaret Wintoniæ vel Wigorniæ vel
Westmonasterii; Præcentor loci recipiet de fisco ipsâ die dimidiam
marcam, et conventus centum Sumnellos et unun modium vini. But,
indeed, the true reading is Siminel.
The English Simnel was the purest White Bread, as in the Book of
Battle Abbey. Panem Regiæ Mensæ aptam, qui Simenel vulgò
vocatur[379]
.
Simula.—A Manchet, a White Loaf. Among the Customs of the
Abbey of Glastonbury: In diebus solemnibus, cum Fratres fuerunt in
cappis, Medonem habuerunt in Justis, et Simulas super mensam, et
vinum ad caritatem, et tria generalia. Chartular. Abbat. Glaston. MS.
fol. 10.](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-83-320.jpg)

![Origin of Thirteen Pence Halfpenny,
AS
HANGMAN'S WAGES;
In a Letter to Edward King, Esq. President of the Society of
Antiquaries.
The vulgar notion, though it will not appear to be a vulgar error,
is, that Thirteen Pence Halfpenny is the fee of the Executioner in the
common line of business at Tyburn[380]
, and therefore is called
Hangman's Wages. The sum is singular, and certainly there is a
reason for its having obtained so odious an appellation, though it
may not be very obvious.
We find that anciently this Office was, in some parts of the
Kingdom, annexed to other Posts; for the Porter of the City of
Canterbury was the Executioner for the County of Kent, temporibus
Hen. II. and Hen. III. for which he had an allowance from the
Sheriff, who was re-imbursed from the Exchequer, of Twenty
Shillings per annum[381]
.
Though this is an Office in great and general disesteem, yet the
Sheriffs are much obliged to those who will undertake it, as
otherwise the unpleasant and painful duty must fall upon
themselves. They are the persons to whom the Law looks for its
completion, as they give a Receipt to the Gaoler for the Bodies of
condemned Criminals whom they are to punish, or cause to be
punished, according to their respective Sentences. The business is of
such an invidious nature, that, in the Country, Sheriffs have
sometimes had much difficulty to procure an Executioner, as, in the
eyes of the lower people, it carries with it a Stigma, apart from any
shock that it must give to Humanity and Compassion. I remember a](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-85-320.jpg)
![very few years ago, if the News-papers said true, the Sheriff of one
of the Inland Counties was very near being obliged to perform the
unwelcome Office himself.
So that in fact the Hangman is the Sheriff's immediate Deputy in
criminal matters, though there is always, at present, an Under-
Sheriff for civil purposes. But, before I bring you to the point in
question, it will not be amiss to lead you gradually to it, by inquiring
into the nature and dignity of the Office in some particulars, and into
the Rank of the Officer, for we have all heard of Squire Ketch. These
will be found to be supportable matters, as well as the Fee of Office,
which is our ground-work.
The Sheriff is, by being so styled in the King's Patent under the
Great Seal, an Esquire, which raises him to that Rank, unless he has
previously had the Title adventitiously. None were anciently chosen
to this Office, but such Gentlemen whose fortunes and stations
would warrant it; so, on the other hand, Merchants, and other liberal
branches of the lower order, were admitted first into the rank of
Gentlemen, by a grant of Arms, on proper qualifications; from the
Earl Marshal, and the Kings of Arms, respectively, according to their
Provinces. After a Negotiant has become a Gentleman, courtesy will
very soon advance that rank, and give the party the title of Esquire;
and so it has happened with the worthy Gentleman before us, for
such I shall prove him once with ceremony to have been created.
This remarkable case happened in the year 1616, and was as
follows. Ralph Brooke, whose real name was Brokesmouth, at that
time York Herald, not content with being mischievous, was the most
turbulent and malicious man that ever wore the King's Coat. After
various malversations in Office, not to the present purpose, he put a
trick upon Sir William Segar, Garter King of Arms, which had very
nearly cost both of them their places. The story is touched upon in
Mr. Anstis's Register of the Order of the Garter[382]
; but is more fully
and satisfactorily related in the Life of Mr. Camden, prefixed to his
Britannia, to this effect. Ralph Brooke employed a person to carry
a Coat of Arms ready drawn to Garter, and to pretend it belonged to
one Gregory Brandon, a Gentleman who had formerly lived in](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-86-320.jpg)
![London, but then residing in Spain, and to desire Garter to set his
hand to it. To prevent deliberation, the messenger was instructed to
pretend that the vessel, which was to carry this confirmation into
Spain, when it had received the Seal of the Office and Garter's Hand,
was just ready to sail[383]
. This being done, and the Fees paid,
Brooke carries it to Thomas Earl of Arundel, then one of the
Commissioners for executing the Office of Earl Marshal; and, in order
to vilify Garter, and to represent him as a rapacious negligent Officer,
assures his Lordship that those were the Arms of Arragon, with a
Canton for Brabant, and that Gregory Brandon was a mean and
inconsiderable person. This was true enough; for he was the
common Hangman for London and Middlesex. Ralph Brooke
afterwards confessed all these circumstances to the Commissioners
who represented the Earl Marshal; the consequence of which was,
that Garter was, by order of the King, when he heard the case,
committed to Prison for negligence, and the Herald for treachery. Be
this as we find it, yet was Gregory Brandon the Hangman become a
Gentleman, and, as the Bastard says in King John, could make any
Joan a Gentlewoman.
Thus was this Gregory Brandon advanced, perhaps from the state
of a Convict, to the rank of a Gentleman; and though it was a
personal honour to himself, notwithstanding it was surreptitiously
obtained by the Herald, of which Gregory Brandon, Gentleman, was
perhaps ignorant, yet did it operate so much on his successors in
office, that afterwards it became transferred from the Family to the
Officer for the time being; and from Mr. Brandon's popularity, though
not of the most desirable kind, the mobility soon improved his rank,
and, with a jocular complaisance, gave him the title of Esquire,
which remains to this day. I have said that Mr. Brandon was perhaps
a Convict; for I know that at York the Hangman has usually been a
pardoned Criminal, whose case was deemed venial, and for which
the performance of this painful duty to fellow-prisoners was thought
a sufficient infliction. It seems too as if this Office had once, like
many other important Offices of State, been hereditary; but whether](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-87-320.jpg)
![Mr. Brandon had it by descent I cannot say, yet Shakspeare has this
passage in Coriolanus[384]
:
Menenius.—Marcius, in a cheap estimation, is worth all your
Predecessors, since Deucalion; though, peradventure, some of the
best of them were Hereditary Hangmen.
This looks as if the Office of Executioner had run in some Family
for a generation or two, at the time when Shakspeare wrote; and
that it was a circumstance well understood, and would be well
relished, at least by the Galleries. This might indeed, with regard to
time, point at the ancestors of Mr. Brandon himself; for it was in the
Reign of King James I. that this person was, as we have seen,
brought within the pale of Gentility. Nay, more, we are told by Dr.
Grey, in his Notes on Shakspeare[385]
, that from this Gentleman, the
Hangmen, his Successors, bore for a considerable time his Christian
name of Gregory, though not his Arms, they being a personal
honour, till a greater man arose, viz. Jack Ketch, who entailed the
present official name on all who have hitherto followed him[386]
.
Whether the name of Ketch be not the provincial pronunciation of
Catch among the Cockneys, I have my doubts, though I have
printed authority to confront me; for that learned and laborious
Compiler, B. E. Gent. the Editor of the Canting Dictionary, says that
Jack Kitch, for so he spells it, was the real name of a Hangman,
which has become that of all his successors. When this great man
lived, for such we must suppose him to have been, and renowned
for his popularity or dexterity, Biographical History is silent.
So much for this important Office itself; and we must now look to
the Emoluments which appertain to it, and assign a reason why
Thirteen Pence Halfpenny should be esteemed the standard Fee for
this definitive stroke of the law.
Hogarth has given a fine Picture of the sang-froid of an
Executioner in his Print of the London Apprentice; where the Mr.
Ketch for the time being is lolling upon the Gallows, and smoaking
his Pipe; waiting, with the utmost indifference, for the arrival of the](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-88-320.jpg)
![Cart and the Mob that close the melancholy Procession. But Use
becomes Nature in things at which even Nature herself revolts.
Before we proceed to matters of a pecuniary nature, having said
so much upon the Executioner, permit me to step out of the way for
a moment, and add a word or two on the Executioné, which will
explain a Yorkshire saying. It was for the most unsuspected crime
imaginable, that the truly unfortunate man who gave rise to the
adage suffered the Sentence of the Law at York. He was a Saddler at
Bawtry, and occasioned this saying, often applied among the lower
people to a man who quits his friends too early, and will not stay to
finish his bottle; That he will be hanged for leaving his liquor, like
the Saddler of Bawtry. The case was this: There was formerly, and
indeed it has not long been suppressed, an Ale-house, to this day
called The Gallows House, situate between the City of York and
their Tyburne; at which House the Cart used always to stop; and
there the Convict and the other parties were refreshed with liquors;
but the rash and precipitate Saddler, under Sentence, and on his
road to the fatal Tree, refused this little regale, and hastened on to
the Place of Execution—when, very soon after he was turned-off, a
Reprieve arrived; insomuch that, had he stopped, as was usual, at
the Gallows House, the time consumed there would have been the
means of saving his life; so that he was hanged, as truly as
unhappily, for leaving his liquor.
The same compliment was anciently paid to Convicts, on their
passage to Tyburne, at St. Giles's Hospital; for we are told by
Stowe[387]
, that they were there presented with a Bowl of Ale, called
St. Giles's Bowl; thereof to drink at their pleasure, as their last
refreshing in this life. This place (Tyburne) was the established
scene of Executions in common cases so long ago as the first year of
King Henry IV; Smithfield and St. Giles's Field being reserved for
persons of higher rank, and for crimes of uncommon magnitude;
such as treason and heresy: in the last of these, Sir John Oldcastle,
Lord Cobham, was burnt, or rather roasted, alive; having been
hanged up over the fire by a chain which went round his waist[388]
.](https://image.slidesharecdn.com/16778184-250606212719-06c6fce3/85/Sliding-Mode-Control-Using-Matlab-Jinkun-Liu-89-320.jpg)