Slide# 1
212 KetterHall, North Campus, Buffalo, NY 14260
www.civil.buffalo.edu
Fax: 716 645 3733 Tel: 716 645 2114 x 2400
Control of Structural Vibrations
Lecture #7_3
Sliding Mode Control
Instructor:
Andrei M. Reinhorn P.Eng. D.Sc.
Professor of Structural Engineering
2.
Slide# 2
Variable Structure
Control
Controller Structure around the plant is changed by some
external influence to obtain desired plant response.
High-speed Switching Control.
For example, the gain in the feedback path switches between
two values according to some rule.
Switching occurs with respect to a switching surface in State
Space.
Individual Structures may be unstable, but the Variable
Structure is asymptotically stable.
3.
Slide# 3
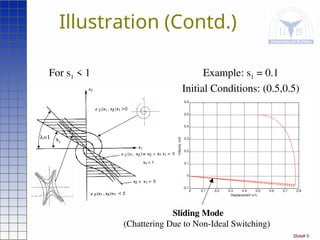
Illustration
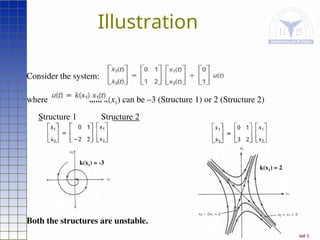
Consider thesystem:
where and k(x1) can be –3 (Structure 1) or 2 (Structure 2)
Structure 1 Structure 2
Both the structures are unstable.
k(x1) = -3
k(x1) = 2
Slide# 6
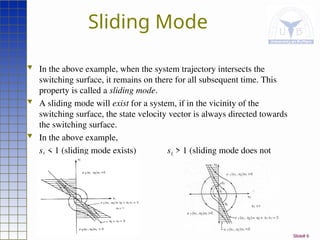
Sliding Mode
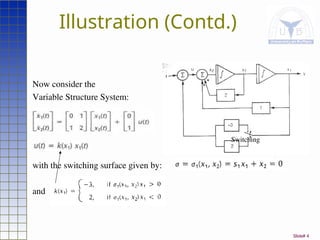
In the above example, when the system trajectory intersects the
switching surface, it remains on there for all subsequent time. This
property is called a sliding mode.
A sliding mode will exist for a system, if in the vicinity of the
switching surface, the state velocity vector is always directed towards
the switching surface.
In the above example,
s1 < 1 (sliding mode exists) s1 > 1 (sliding mode does not
exist).
7.
Slide# 7
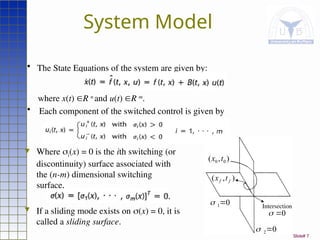
System Model
Where i(x) = 0 is the ith switching (or
discontinuity) surface associated with
the (n-m) dimensional switching
surface,
If a sliding mode exists on (x) = 0, it is
called a sliding surface.
• The State Equations of the system are given by:
where x(t) R n
and u(t) R m
.
• Each component of the switched control is given by
)
,
( 0
0 t
x
0
1
0
2
)
,
( f
f t
x
Intersection
0
8.
Slide# 8
Design ofSliding Mode
Control
Phase 1 (Sliding Surface Design): Constructing Switching
Surfaces so that the system restricted to the switching
surface produces a desired behavior.
– For convenience only linear switching surfaces of the form Sx(t)=0
are considered in practice.
Phase 2 (Controller Design): Constructing switched
feedback gains which drive the plant state trajectory to the
sliding surface and maintain it there.
– For the existence of a sliding mode on the switching surface, the
state velocity vectors should be directed towards the surface, i..e., the
system must be stable to the switching surface. Therefore there must
exist a Lyapunov function in the neighborhood of the switching
surface. The feedback gains are determined to ensure the time
derivative of a suitable Lyapunov function to remain negative
definite.
9.
Slide# 9
Sliding SurfaceDesign
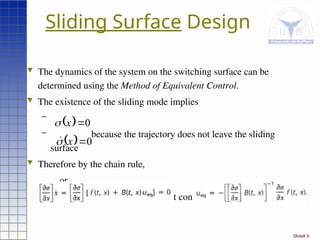
The dynamics of the system on the switching surface can be
determined using the Method of Equivalent Control.
The existence of the sliding mode implies
–
– because the trajectory does not leave the sliding
surface
Therefore by the chain rule,
or
where ueq is the so-called equivalent control force.
0
x
0
x
10.
Slide# 10
Sliding SurfaceDesign
(Contd.)
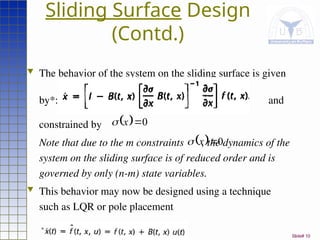
The behavior of the system on the sliding surface is given
by*: and
constrained by
Note that due to the m constraints , the dynamics of the
system on the sliding surface is of reduced order and is
governed by only (n-m) state variables.
This behavior may now be designed using a technique
such as LQR or pole placement
0
x
0
x
*
11.
Slide# 11
Sliding ModeControl of Linear
Structures (Yang et. al., 1994)
Equations of Motion in Second order Form:
Equations of Motion in State Space Form:
Sliding Surface: (Linear) where r = no. of controllers [ ]
Method of Equivalent Control gives:
The matrix P has to be determined so that this reduced order system has
desirable properties:
12.
Slide# 12
SMC ofLinear Structures
(Contd.)
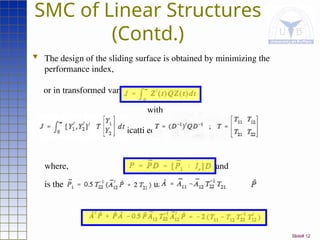
The design of the sliding surface is obtained by minimizing the
performance index,
or in transformed variables,
with
Solving the resulting Ricatti equation, one can obtain
where, , and
is the solution of the Ricatti equation:
13.
Slide# 13
SMC ofLinear Structures
(Coordinate Transformations)
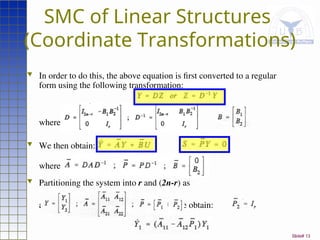
In order to do this, the above equation is first converted to a regular
form using the following transformation:
where
We then obtain: and
where
Partitioning the system into r and (2n-r) as
and setting for convenience, we obtain:
14.
Slide# 14
Controller Designfor
SMC of Linear Structures
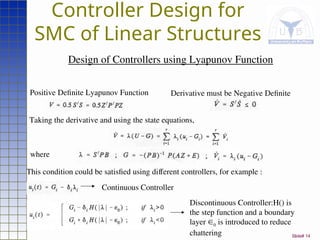
Design of Controllers using Lyapunov Function
Positive Definite Lyapunov Function Derivative must be Negative Definite
Taking the derivative and using the state equations,
where
This condition could be satisfied using different controllers, for example :
Continuous Controller
Discontinuous Controller:H() is
the step function and a boundary
layer 0 is introduced to reduce
chattering
15.
Slide# 15
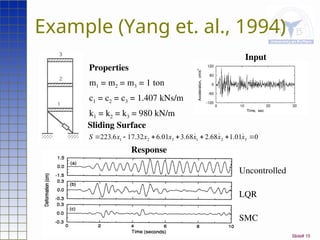
Example (Yanget. al., 1994)
Input
Properties
m1 = m2 = m3 = 1 ton
c1 = c2 = c3 = 1.407 kNs/m
k1 = k2 = k3 = 980 kN/m
Uncontrolled
LQR
SMC
Response
0
01
.
1
68
.
2
68
.
3
01
.
6
32
.
17
6
.
223 3
2
1
3
2
1
x
x
x
x
x
x
S
Sliding Surface
16.
Slide# 16
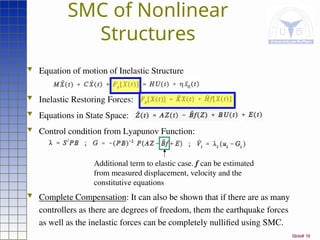
SMC ofNonlinear
Structures
Equation of motion of Inelastic Structure
Inelastic Restoring Forces:
Equations in State Space:
Control condition from Lyapunov Function:
Complete Compensation: It can also be shown that if there are as many
controllers as there are degrees of freedom, them the earthquake forces
as well as the inelastic forces can be completely nullified using SMC.
Additional term to elastic case. f can be estimated
from measured displacement, velocity and the
constitutive equations
17.
Slide# 17
Advantages ofSMC
Robustness: The behavior on the sliding mode depends only on the
switching surface and is independent of the structural properties.
Therefore the effectiveness of control is insensitive to parametric
uncertainties of the model.
Nonlinear Structures: The control algorithm is applicable to nonlinear and
inelastic structures unlike linear control and other frequency domain
algorithms.
Uses information about input as well as output feedback in control
determination. It is therefore an open-closed-loop type control.
![Slide# 11
Sliding Mode Control of Linear
Structures (Yang et. al., 1994)
Equations of Motion in Second order Form:
Equations of Motion in State Space Form:
Sliding Surface: (Linear) where r = no. of controllers [ ]
Method of Equivalent Control gives:
The matrix P has to be determined so that this reduced order system has
desirable properties:](https://image.slidesharecdn.com/lecture73slidingmodecontrol-250225192103-882d758c/85/Lecture-__________SlidingModeControl-ppt-11-320.jpg)