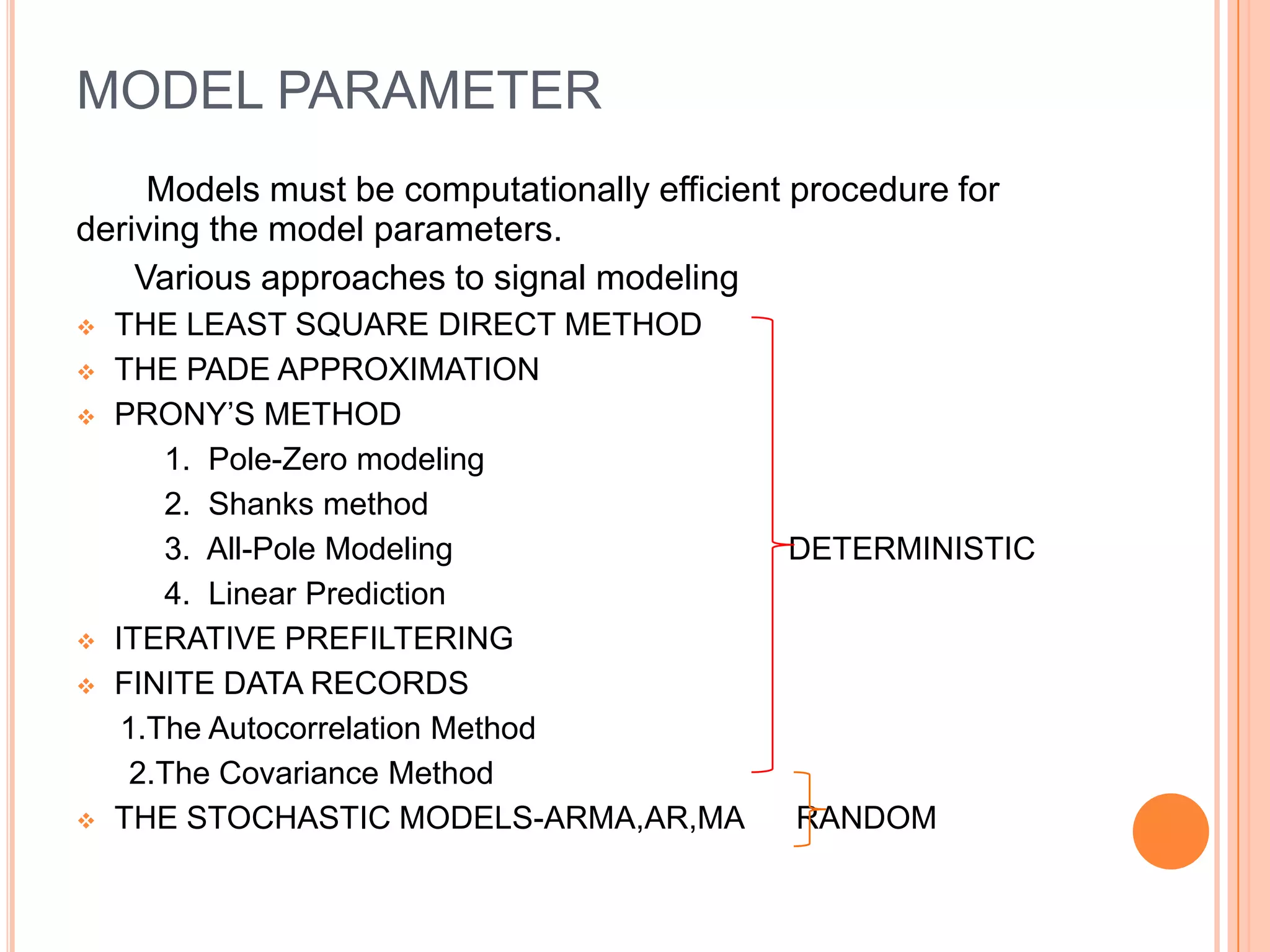
This document discusses various methods for modeling signals, including deterministic and stochastic processes. It covers topics like the least mean square direct method, Pade approximation, Prony's method, Shanks method, and stochastic processes like ARMA, MA, and AR. It also discusses an application of signal modeling for designing a least squares inverse FIR filter. Model order estimation is noted as an important problem in signal modeling when the correct model order is unknown.
![PADE APPROXIMATION
Pade approximation only requires solving a set linear equation.
In Pade we force the filter output h(n) to be equal to given signal x(n)
for p+q+1 values of n.
In time domain,
Where h(n)=0 for n<0 and n>q.To find the cofficients ap(k) and bq(k)
that gives an exact fit of data model in [0,p+q] we set h(n)=x(n)](https://image.slidesharecdn.com/signalmodelling-120820211427-phpapp01/75/Signal-modelling-13-2048.jpg)
![CONCLUSIONS ON PADE APPROXIMATION
The model formed from Pade approximation will
produce an exact fit to data over the
interval[0,p+q].But has no guarantee on how
accurate the model will be for n>p+q.
Pade approximation will give correct model
parameters provided the model order is chosen to
be large enough.
Since the Pade approximation forces the model to
match the signal only over limited range of
values,the model generated is not stable](https://image.slidesharecdn.com/signalmodelling-120820211427-phpapp01/75/Signal-modelling-15-2048.jpg)
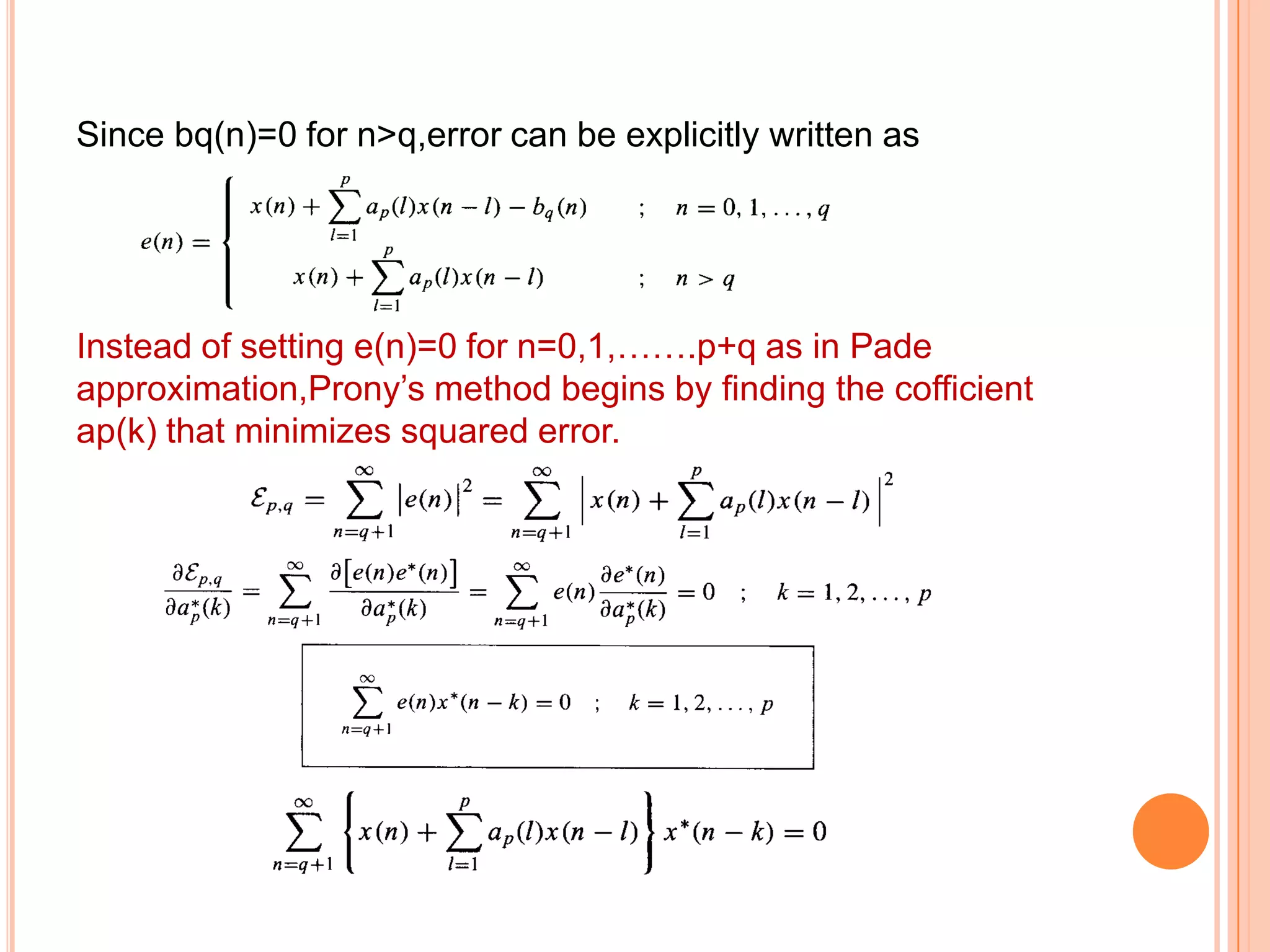
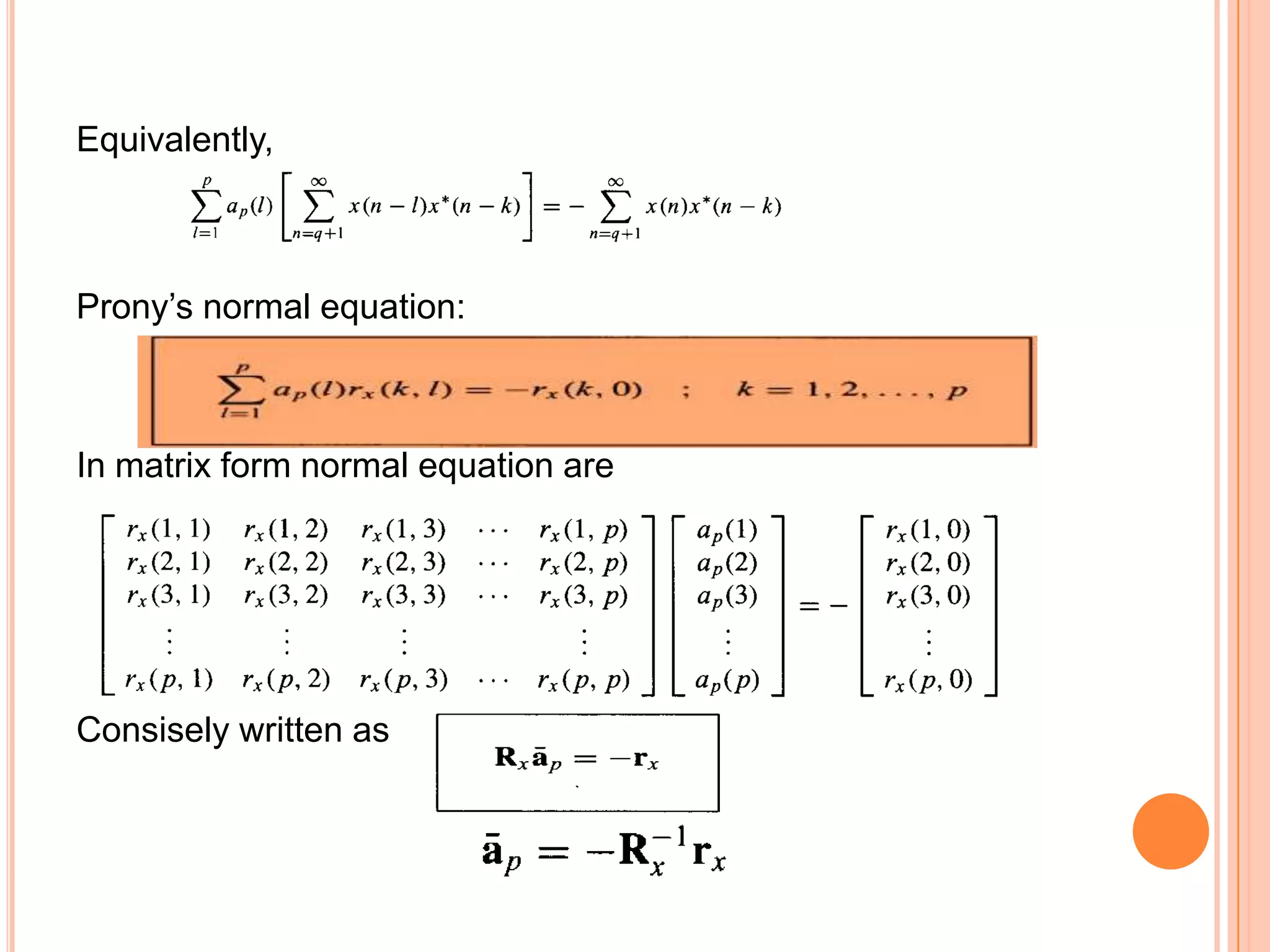
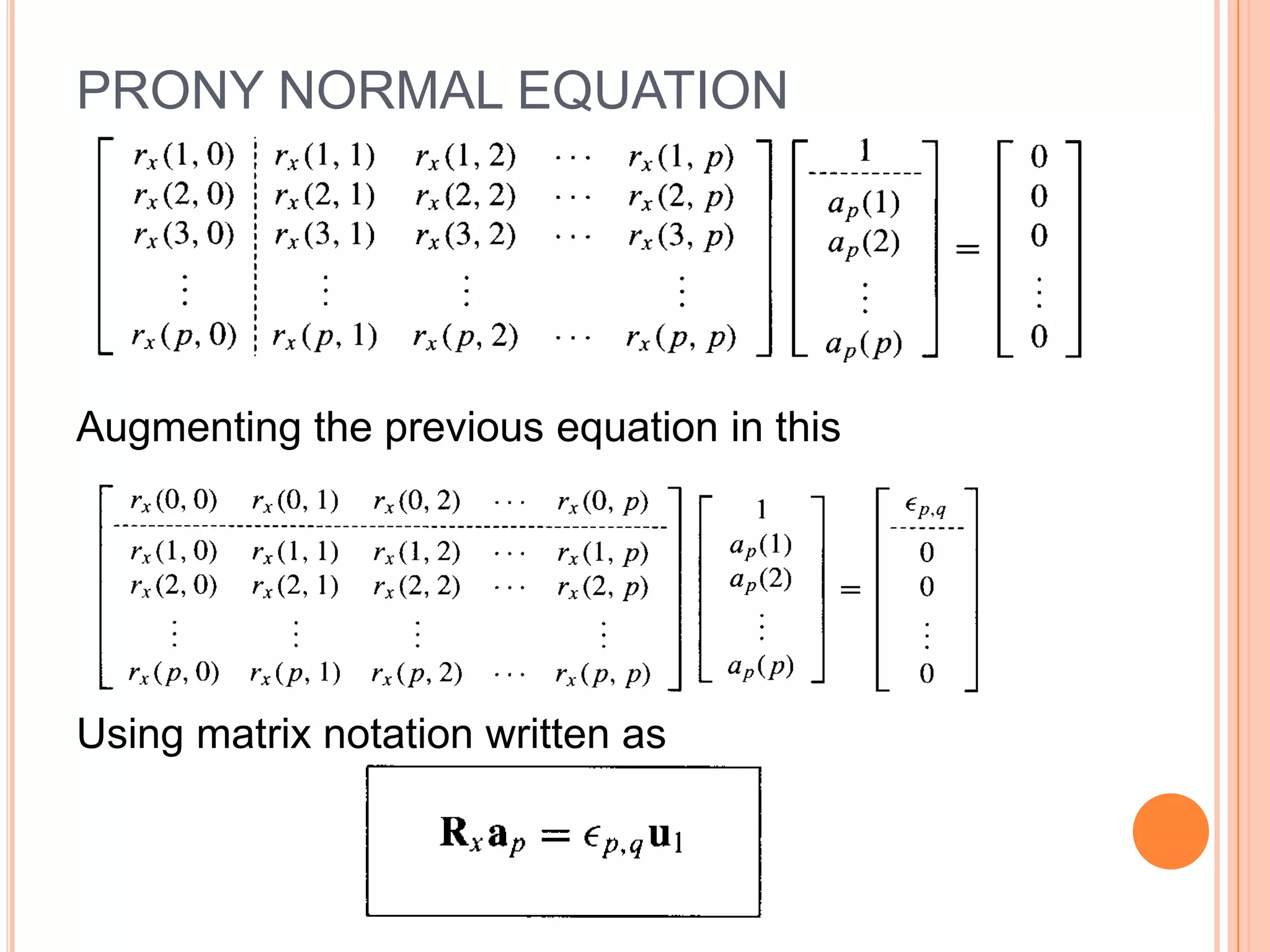
![PRONY’S METHOD
The limitation of Pade approximation-Only uses values of the
signal x(n) over the interval [0,p+q] to determine model
parameter and over this interval, it models the signal without
error.
There is no guarantee on how well the model will
approximate the signal for n>p+q
POLE ZERO MODELLING:
Similar to pade x(n)=0 for n<0.A least square minimization of e’(n)
results in set of non-linear equation for filter cofficient
Multiplying by Ap(z) we have new error
That is linear cofficients.In time domain:](https://image.slidesharecdn.com/signalmodelling-120820211427-phpapp01/75/Signal-modelling-16-2048.jpg)
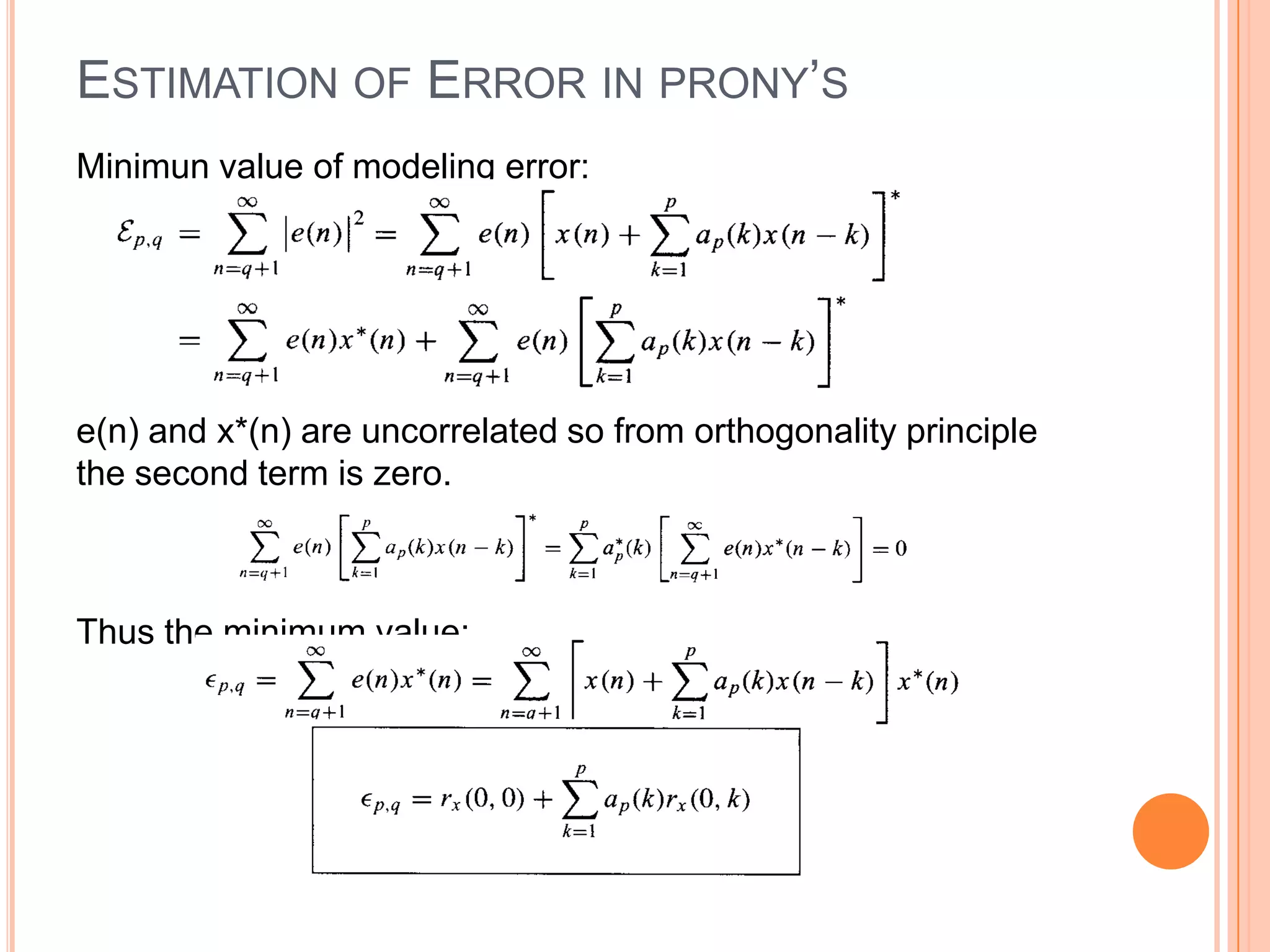
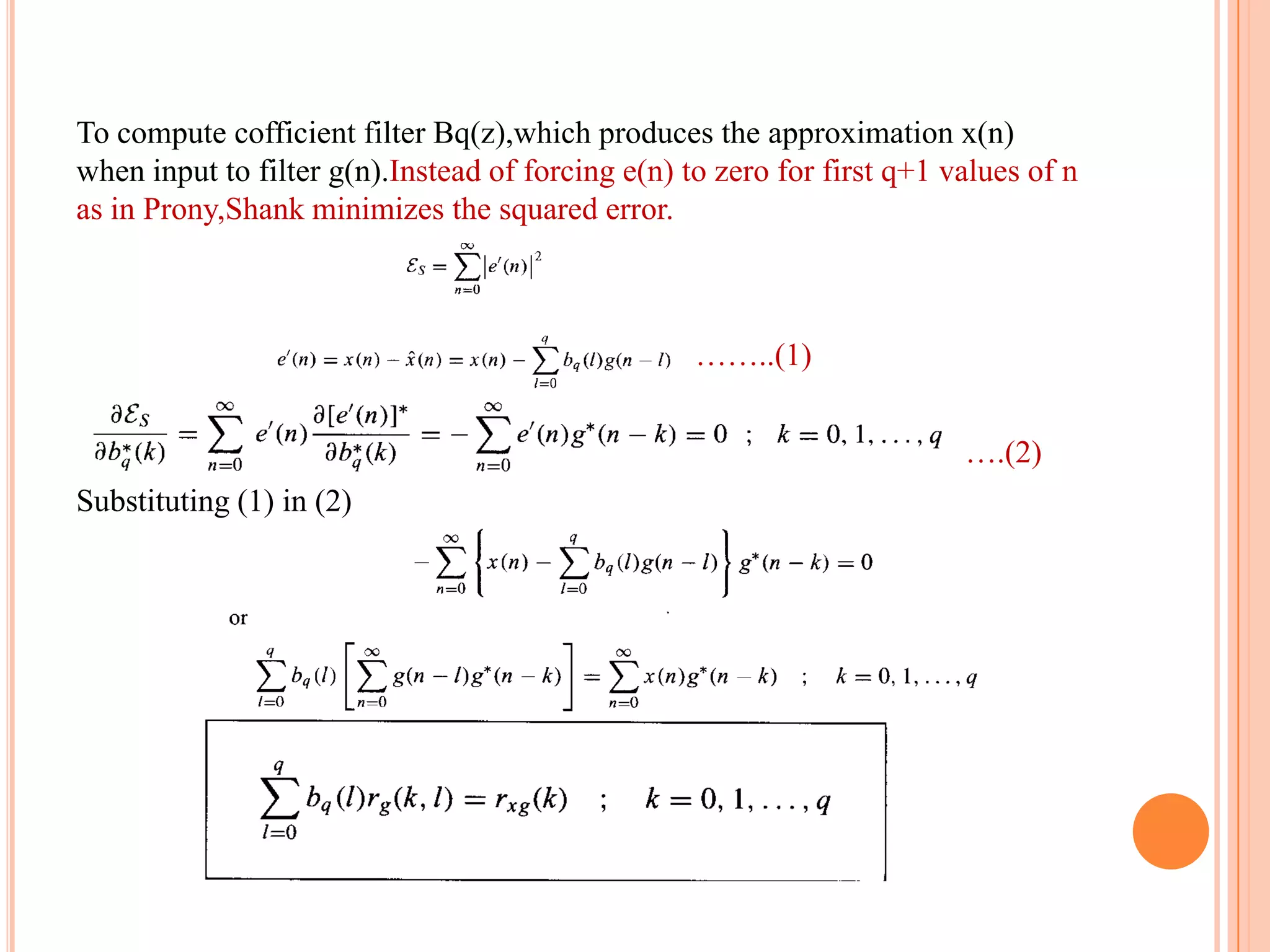
![SHANKS APPROXIMATION
In Prony e(n)=0 for n=1, 2,….q.Although this allows the model to be exact
over [0,q],this does not take into account data for n>q.
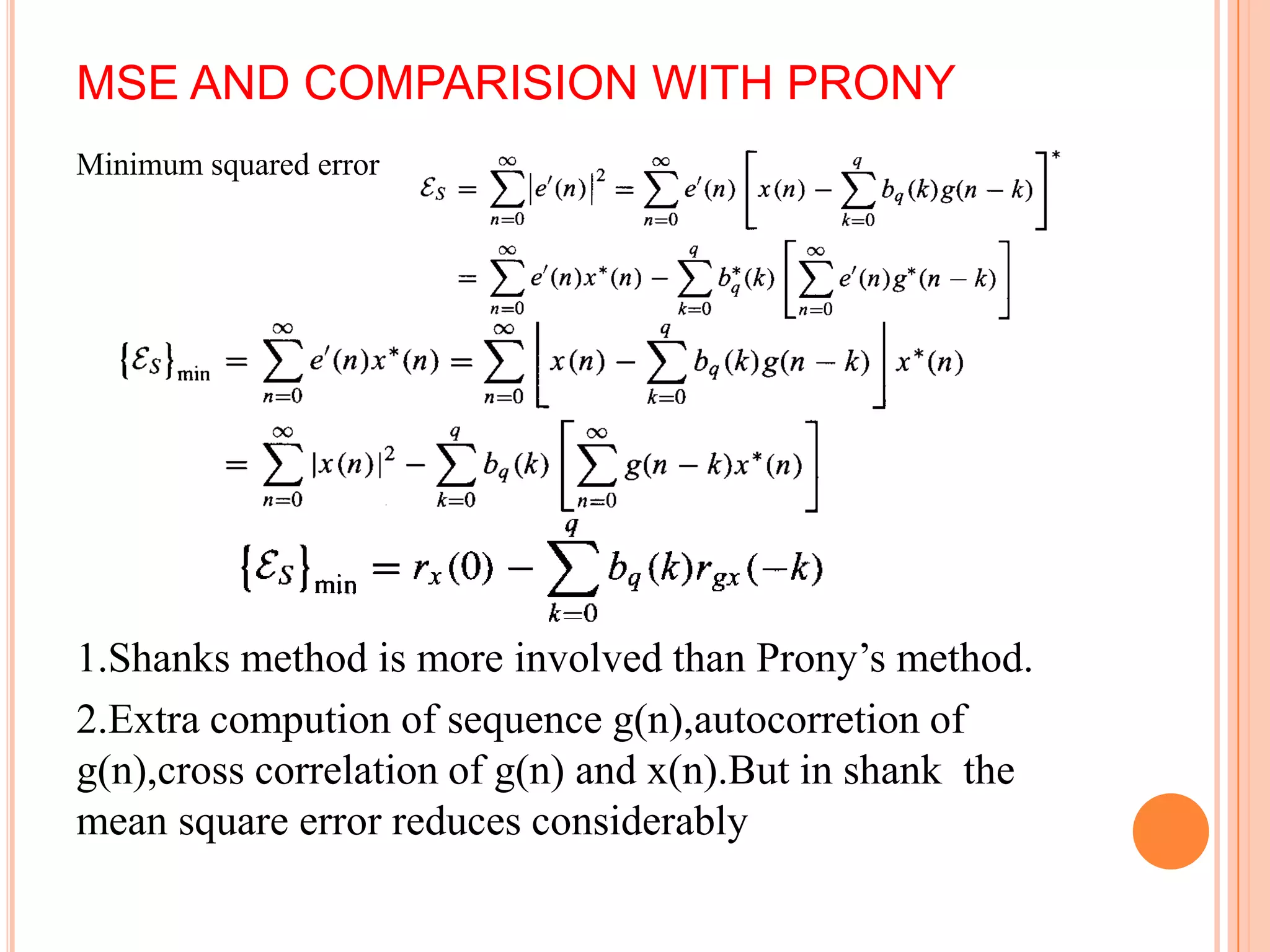
Shanks performs mininization of model error over entire length of data record.
Filter can be viewed as cascade of two filter Ap(z) and Bq(z)
g(n) can be computed using the equation:](https://image.slidesharecdn.com/signalmodelling-120820211427-phpapp01/75/Signal-modelling-22-2048.jpg)