Download to read offline

![Arthur Charpentier, SIDE Summer School, July 2019
Machine Learning, Practical Issues
Use the QR decomposition of X, X = QR where Q is an orthogonal matrix
QT
Q = I. Then
β = [XT
X]−1
XT
y = R−1
QT
y
Consider m blocks - map part
y =
y1
y2
...
ym
and X =
X1
X2
...
Xm
=
Q
(1)
1 R
(1)
1
Q
(1)
2 R
(1)
2
...
Q(1)
m R(1)
m
@freakonometrics freakonometrics freakonometrics.hypotheses.org 3](https://image.slidesharecdn.com/sidearthur2019preliminary09-190719063801/85/Side-2019-9-3-320.jpg)
![Arthur Charpentier, SIDE Summer School, July 2019
Machine Learning, Practical Issues
Consider the QR decomposition of R(1)
- step 1 of reduce part
R(1)
=
R1
R2
...
Rm
= Q(2)
R(2)
where Q(2)
=
Q
(2)
1
Q
(2)
2
...
Q(2)
m
define - step 2 of reduce part
Q
(3)
j = Q
(2)
j Q
(1)
j and V j = Q
(3)
j
T
yj
and finally set - step 3 of reduce part
β = [R(2)
]−1
m
j=1
V j
@freakonometrics freakonometrics freakonometrics.hypotheses.org 4](https://image.slidesharecdn.com/sidearthur2019preliminary09-190719063801/85/Side-2019-9-4-320.jpg)

![Arthur Charpentier, SIDE Summer School, July 2019
• Update with a new observation, as Ridell (1975, Recursive Estimation Algorithms
for Economic Research)
Let X1:n denote the matrix of covariates, with n observations (rows), and xn+1
denote a new one. Recall that
βn = [X1:n
T
X1:n]−1
X1:n
T
y1:n = C−1
n X1:n
T
y1:n
Since Cn+1 = X1:n+1X1:n+1 = Cn + xn+1xn+1, then
βn+1 = βn + C−1
n+1xn+1[yn+1 − xn+1βn]
This updating formation is also called a differential correction, since it is
proportional to the prediction error.
Note that the residual sum of squares can also be updated, with
Sn+1 = Sn +
1
d
[yn+1 − xn+1
T
βn]2
@freakonometrics freakonometrics freakonometrics.hypotheses.org 6](https://image.slidesharecdn.com/sidearthur2019preliminary09-190719063801/85/Side-2019-9-6-320.jpg)
![Arthur Charpentier, SIDE Summer School, July 2019
Online Learning
Online Learning for OLS
βn+1 = βn + C−1
n+1xn+1[yn+1 − xn+1βn]
is a recursive formula, requires storing all the data
(and inverting a matrix at each step).
Good news, [A + BCD]−1
= A−1
− A−1
B DA−1
B + C−1 −1
DA−1
, so
C−1
n+1 = C−1
n −
C−1
n xn+1xn+1C−1
n
1 + xn+1C−1
n xn+1
We have an algorithm of the form for k = 1, 2 · · · , mk = A(mk−1, (yn, Cn, xn))
for some matrix Cn
@freakonometrics freakonometrics freakonometrics.hypotheses.org 7](https://image.slidesharecdn.com/sidearthur2019preliminary09-190719063801/85/Side-2019-9-7-320.jpg)
![Arthur Charpentier, SIDE Summer School, July 2019
Online Learning
Online Learning for OLS
βn+1 = βn + C−1
n+1xn+1[yn+1 − xn+1βn]
is also a gradient-type algorithm, since
yn+1 − xn+1β
2
= 2xn+1[yn+1 − xn+1β]
One might consider using γn+1 ∈ R instead of Cn+1 (p × p matrix)
Polyak-Ruppert Averaging suggests to use γn = n−α
where α ∈ (1/2, 1) to ensure
convergence
@freakonometrics freakonometrics freakonometrics.hypotheses.org 8](https://image.slidesharecdn.com/sidearthur2019preliminary09-190719063801/85/Side-2019-9-8-320.jpg)
![Arthur Charpentier, SIDE Summer School, July 2019
Update Formulas
• Update with a new variable
Let X1:k denote the matrix of covariates, with k explanatory variables
(columns), and xk+1 denote a new one. Recall that
βk = [X1:k
T
X1:k]−1
X1:k
T
y
Then βk+1 = (βk , βk+1)T
where
βk = βk −
[X1:k
T
X1:k]−1
X1:k
T
xk+1xk+1P⊥
k y
xk+1
TP⊥
k xk+1
with P⊥
k = I − X1:k(X1:k
T
X1:k)−1
X1:k
T
, while
βk+1 =
xk+1
T
P⊥
k y
xk+1
TP⊥
k xk+1
If xk+1 is orthogonal to previous variables - X1:k
T
xk+1 = 0, then βk = βk.
Observe that P⊥
k y = εk.
@freakonometrics freakonometrics freakonometrics.hypotheses.org 9](https://image.slidesharecdn.com/sidearthur2019preliminary09-190719063801/85/Side-2019-9-9-320.jpg)

![Arthur Charpentier, SIDE Summer School, July 2019
Missing Values
With lm function, rows with missing values (in y or x) are deleted
To deal with them, one should understand the mechanism leading to missing values
Expectation - Maximization, see Dempster et al. (1977, Maximum Likelihood from Incomplete
Data via the EM Algorithm)
Consider a mixture model dF(y) = p1dFθ1 (y) + p2dFθ2 (y), i.e. there is Θ ∈ {1, 2} (with
pj = P[Θ = j]) such that
yi =
y1,i with Y1 ∼ Fθ1 , if Θ = 1
y2,i with Y2 ∼ Fθ2 , if Θ = 2
see mixtools::normalmixEM for Gaussian mixtures
@freakonometrics freakonometrics freakonometrics.hypotheses.org 11](https://image.slidesharecdn.com/sidearthur2019preliminary09-190719063801/85/Side-2019-9-11-320.jpg)


![Arthur Charpentier, SIDE Summer School, July 2019
Expectation - Maximization
EM for Mixtures
(i) start with initial values θ1,0 and θ2,0, pj,0
(ii) for k = 1, 2, · · ·
E step : γk,j,i =
dF
θj,k−1
(yi)
p1,k−1dF
θ1,k−1
(yi) + p2,k−1dF
θ2,k−1
(yi)
M step : use ML techniques with weights γk,j,i
M step with a Gaussian mixture, µj,k =
γk,j,iyi
γk,j,i
and σ2
j,k =
γk,j,i[yi − µj,k]2
γk,j,i
@freakonometrics freakonometrics freakonometrics.hypotheses.org 14](https://image.slidesharecdn.com/sidearthur2019preliminary09-190719063801/85/Side-2019-9-14-320.jpg)







![Arthur Charpentier, SIDE Summer School, July 2019
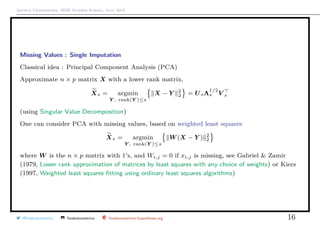
Missing Values : Single Imputation
One can use regularized iterative PCA. So far, we used (SVD) XsUsΛ
1/2
s V s
Xi,j =
s
k=1
λkUi,kVj,k
Following Efron & Morris (1972, Limiting the Risk of Bayes and Empirical Bayes Estimators)
consider a shrinkage version
Xi,j =
s
k=1
λk − σ2
λk
λkUi,kVj,k =
s
k=1
λk −
σ2
λk
Ui,kVj,k
where σ2
=
n[λs + 1 + · · · + λp]
np − p − ns − ps + s2 + s
See package missMDA
@freakonometrics freakonometrics freakonometrics.hypotheses.org 23](https://image.slidesharecdn.com/sidearthur2019preliminary09-190719063801/85/Side-2019-9-23-320.jpg)





The document outlines practical issues related to machine learning, specifically addressing challenges like accessing incomplete datasets and updating models with new observations or variables. It discusses techniques such as QR decomposition, online learning algorithms, and the expectation-maximization method for handling missing values in datasets. Additionally, it delves into single imputation methods like iterative PCA to approximate missing data, emphasizing the importance of understanding mechanisms behind missing values.