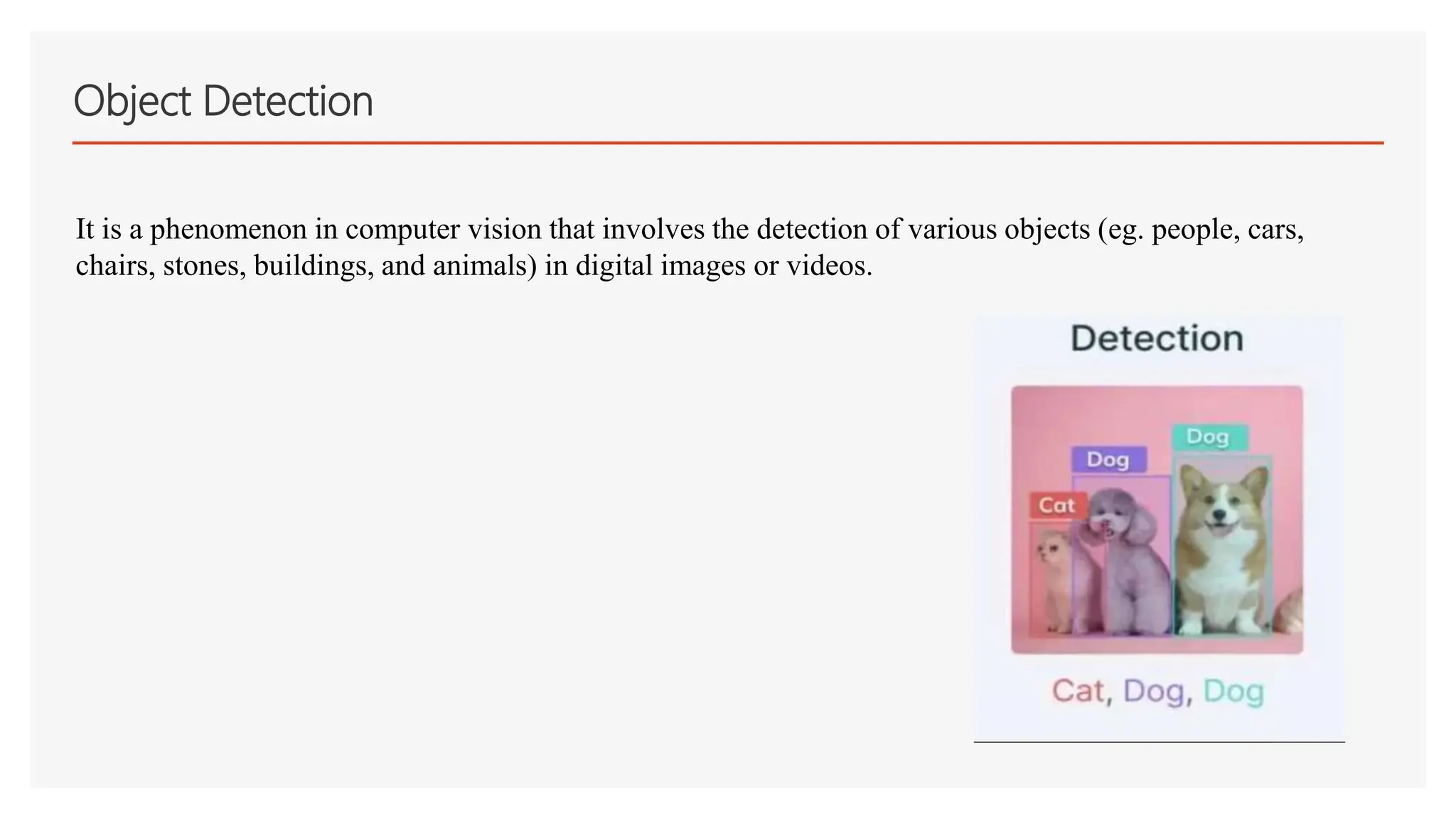
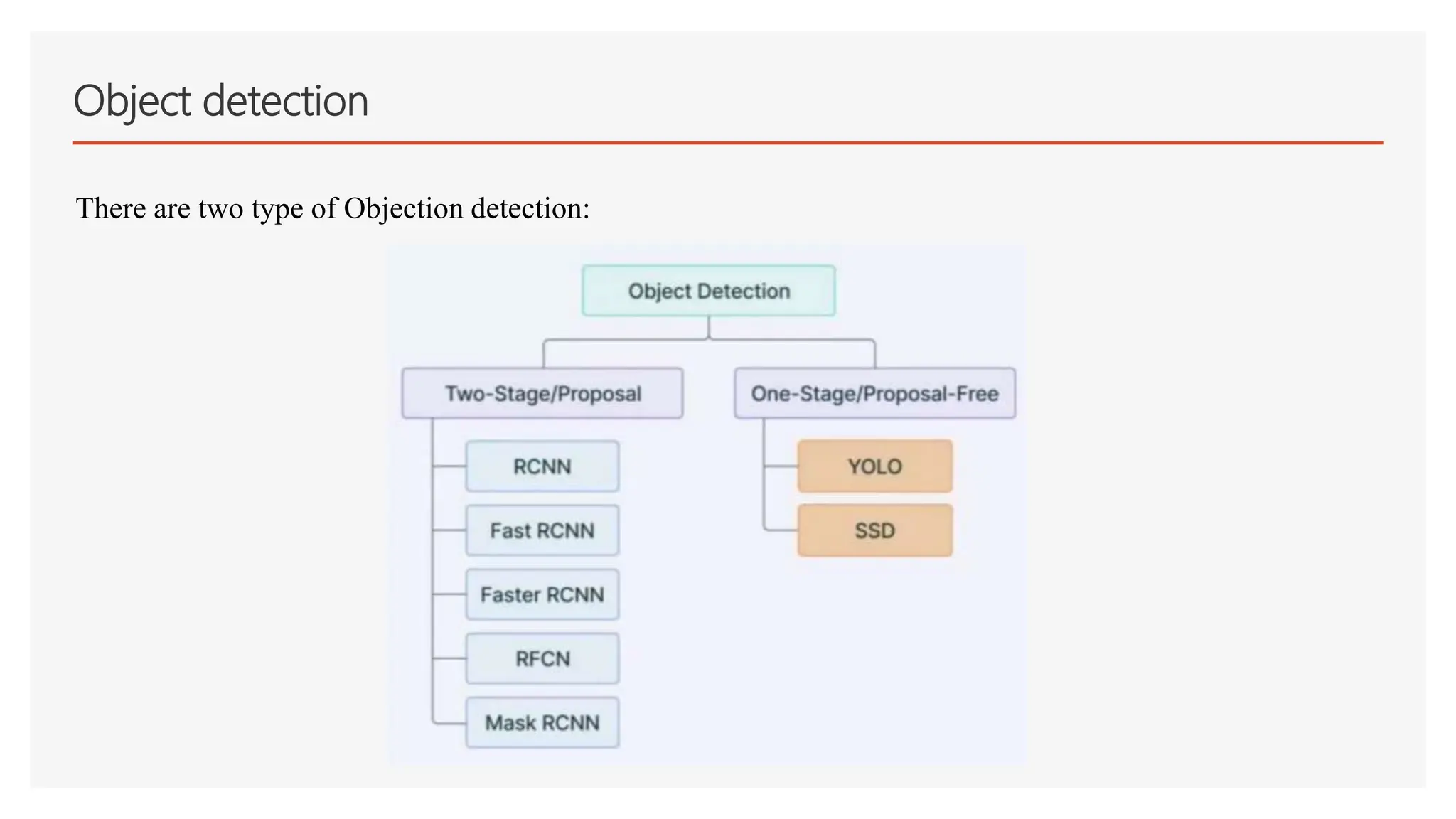
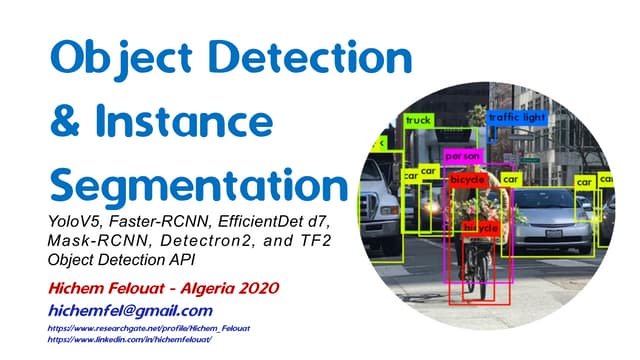
This document summarizes a seminar presentation on the YOLO algorithm for object detection. It begins with an introduction to object detection and an overview of YOLO. It then explains how YOLO works by dividing images into grids and predicting bounding boxes and class probabilities for each grid. The document also discusses intersection over union (IoU) for evaluating localization accuracy and average precision (AP) for evaluating overall detection performance. It concludes that YOLO is a fast and robust method for real-time object detection.