Download to read offline
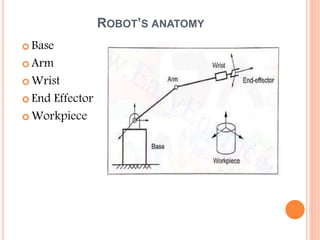
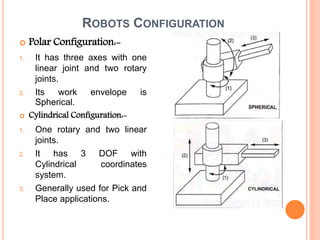
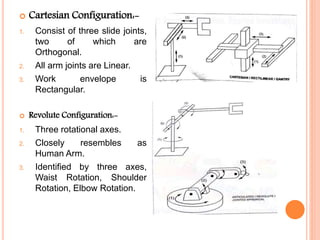
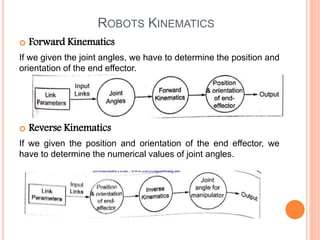


This document provides an overview of robotics and motion control. It outlines different components of robots like manipulators, end effectors, actuators, and sensors. It describes various robot configurations including polar, cylindrical, and Cartesian. It also discusses robot kinematics, specifications, industrial applications, and the need for robots in tasks that are hazardous, repetitive, or require speed and accuracy.