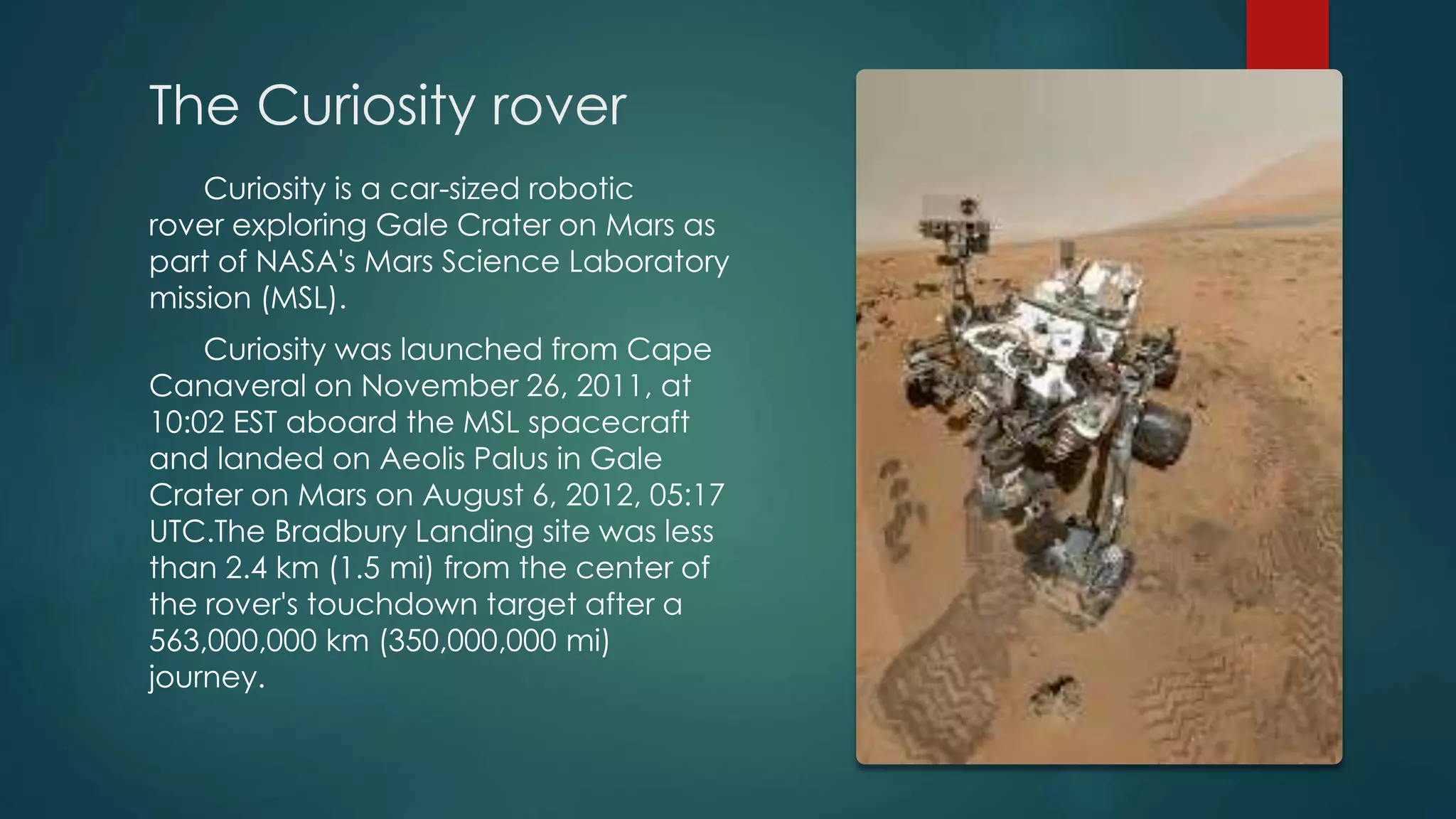
The document provides an overview of NASA's Curiosity rover, which is exploring Gale Crater on Mars as part of the Mars Science Laboratory mission. Launched on November 26, 2011, Curiosity aims to determine Mars' potential to support life, investigate its climate and geology, and prepare for future human exploration. It features a radioisotope thermoelectric generator for power and has various scientific instruments for analyzing Martian surface materials.