Downloaded 19 times

![18
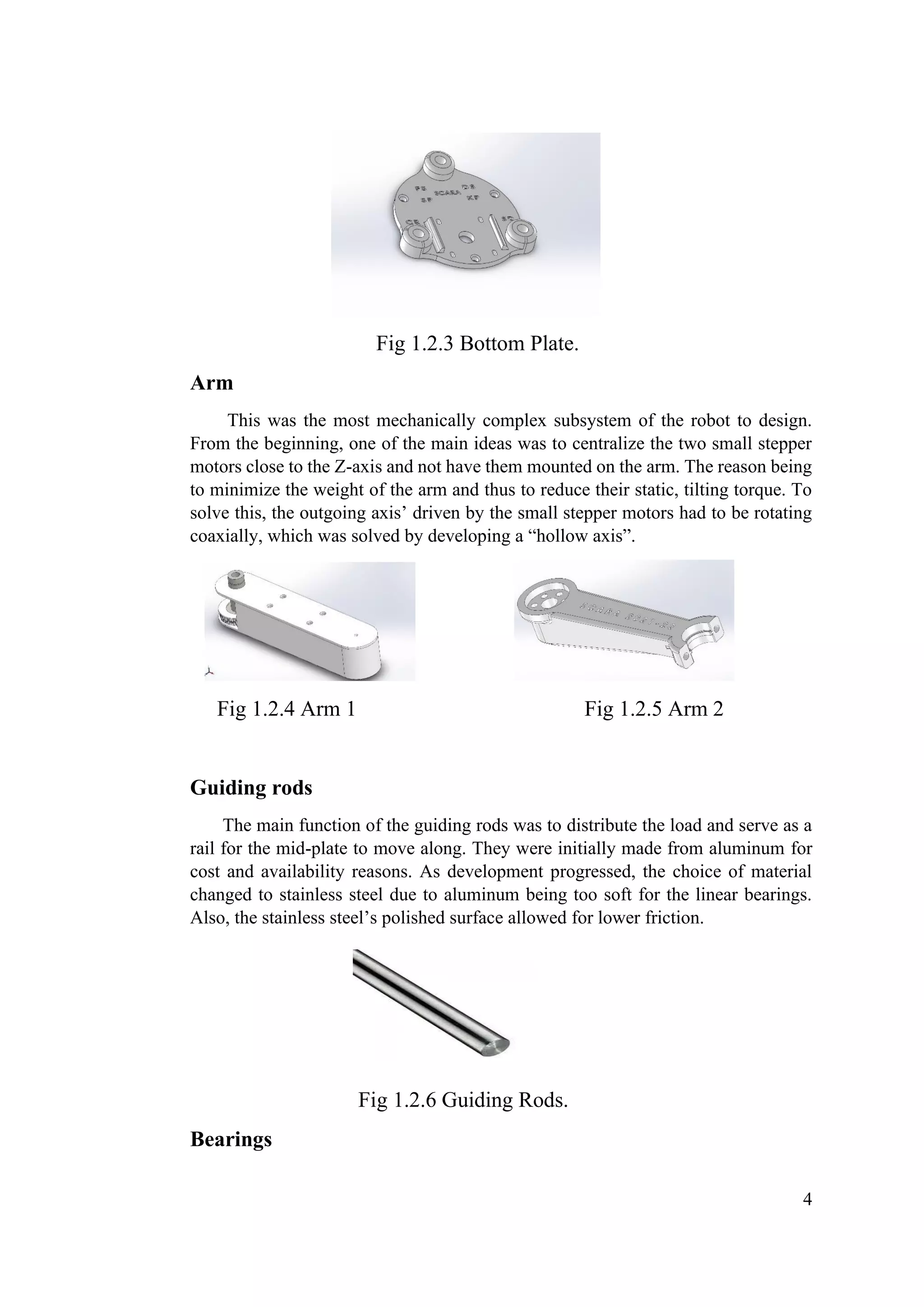
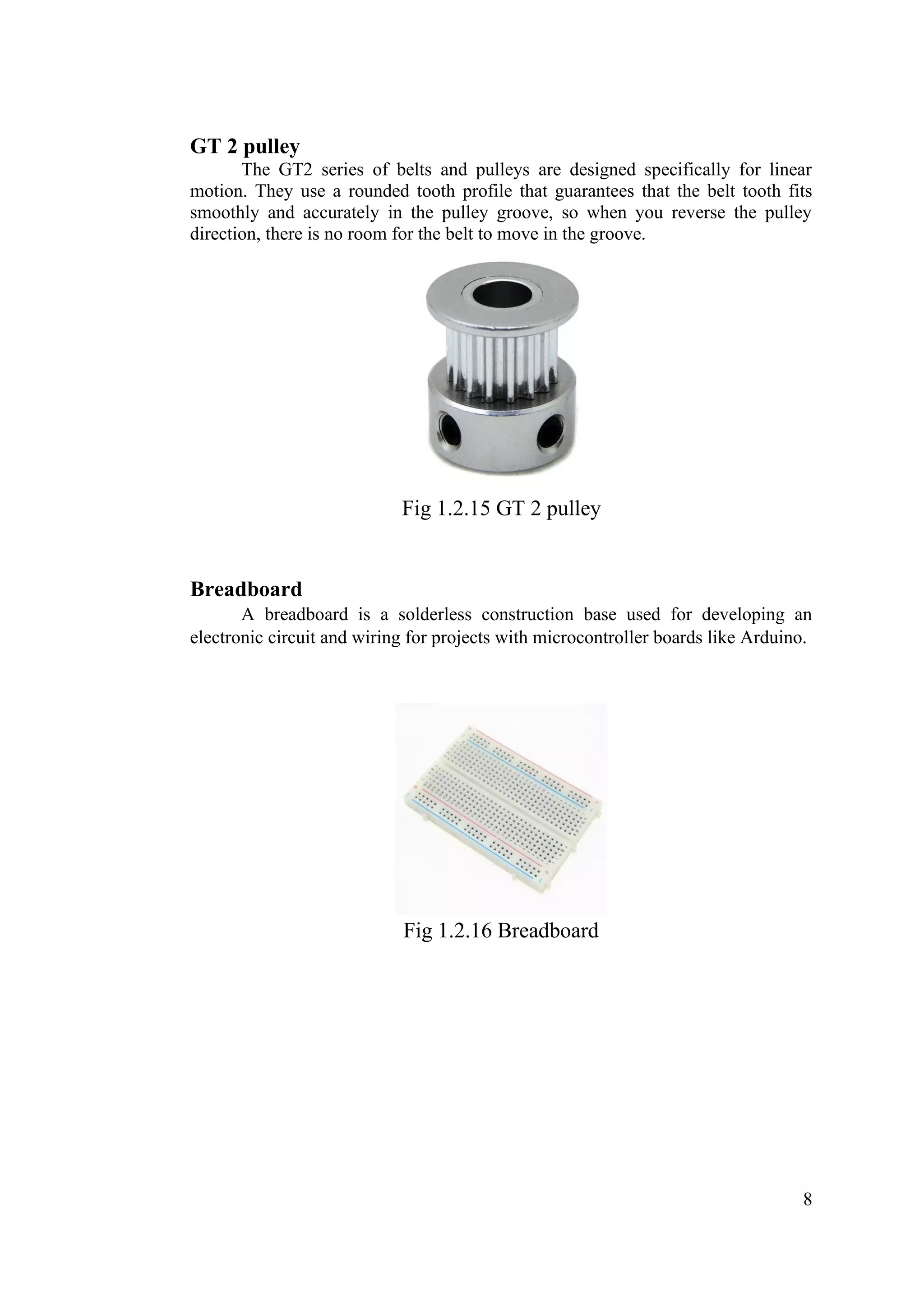
4.1 Torque calculation for motor selection
Link-1: - Required torque
Fig. 4.1.1- Arm 1
Torque(𝜏1) = F1 x r1 x sin(θ)
Considering FOS = 1.2
= [1.3N x 1.2SF] x 25 x sin (90)
Torque(𝜏1) = 39N.cm
= 39/9.81 Kg.cm
Torque(𝜏1) = 3.9755 Kg.cm
Available Torque at that point
For arm -1
N1/ N2 = (T1/T2) × Motor torque
= (56/20) × 2.8 Kg.cm.
N1/N2= 7.84 Kg.cm.
Available torque for arm -1, i.e. 7.84 Kg.cm. is greater than calculated torque
i.e. 3.9755 Kg.cm.](https://image.slidesharecdn.com/scarareport-220923134821-19c6366b/75/Design-and-Fabrication-of-a-Selective-Compliance-Articulated-Robot-Arm-SCARA-25-2048.jpg)
![19
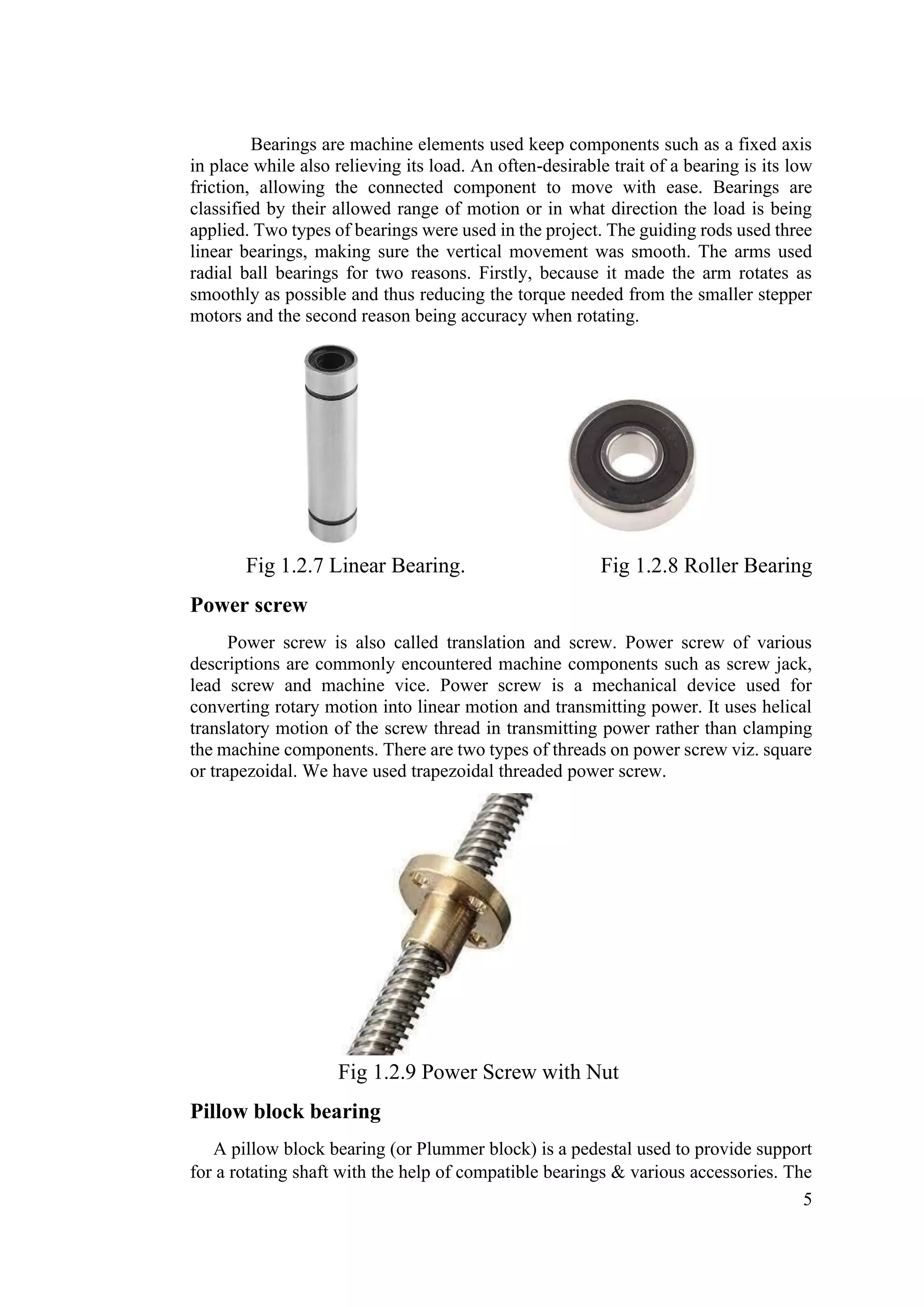
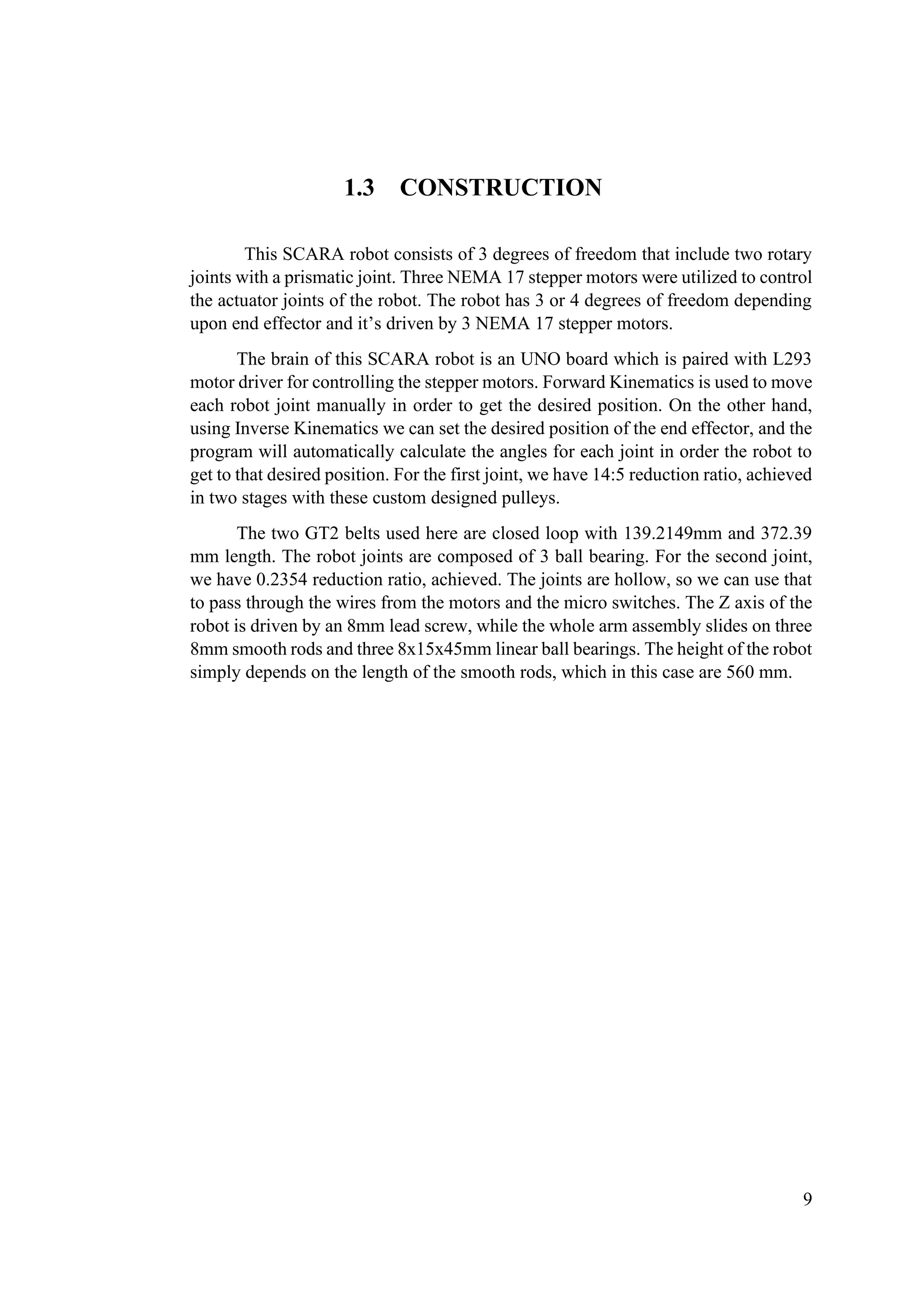
Therefore, Design is safe
Fig. 4.1.2- Arm 2
Link-2: - Required torque
Torque(𝜏2) = F2 x r2 x sin(θ)
= [1N x 1.2SF] x 10 x sin (90)
Torque(𝜏2) = 12 N.cm
= 12/9.81 Kg.cm
Torque(𝜏2) = 1.2232 Kg.cm
Available Torque at that point
For arm -2
N2/N3 = T3/T2
[N1 × (T1/T2)] = T3/T2
N1/N3 = [(T3/T2) × (T2/T1)]
= [(44/29) × (56/20)]
N1/ N3 = (616/145) × Motor Torque
= (616/145) × 2.8 Kg.cm.
= 11.8951 Kg.cm.
Available torque for arm -2, i.e., 11.8951 Kg.cm. is greater than calculated
torque i.e., 1.2232. Kg.cm.](https://image.slidesharecdn.com/scarareport-220923134821-19c6366b/75/Design-and-Fabrication-of-a-Selective-Compliance-Articulated-Robot-Arm-SCARA-26-2048.jpg)
![20
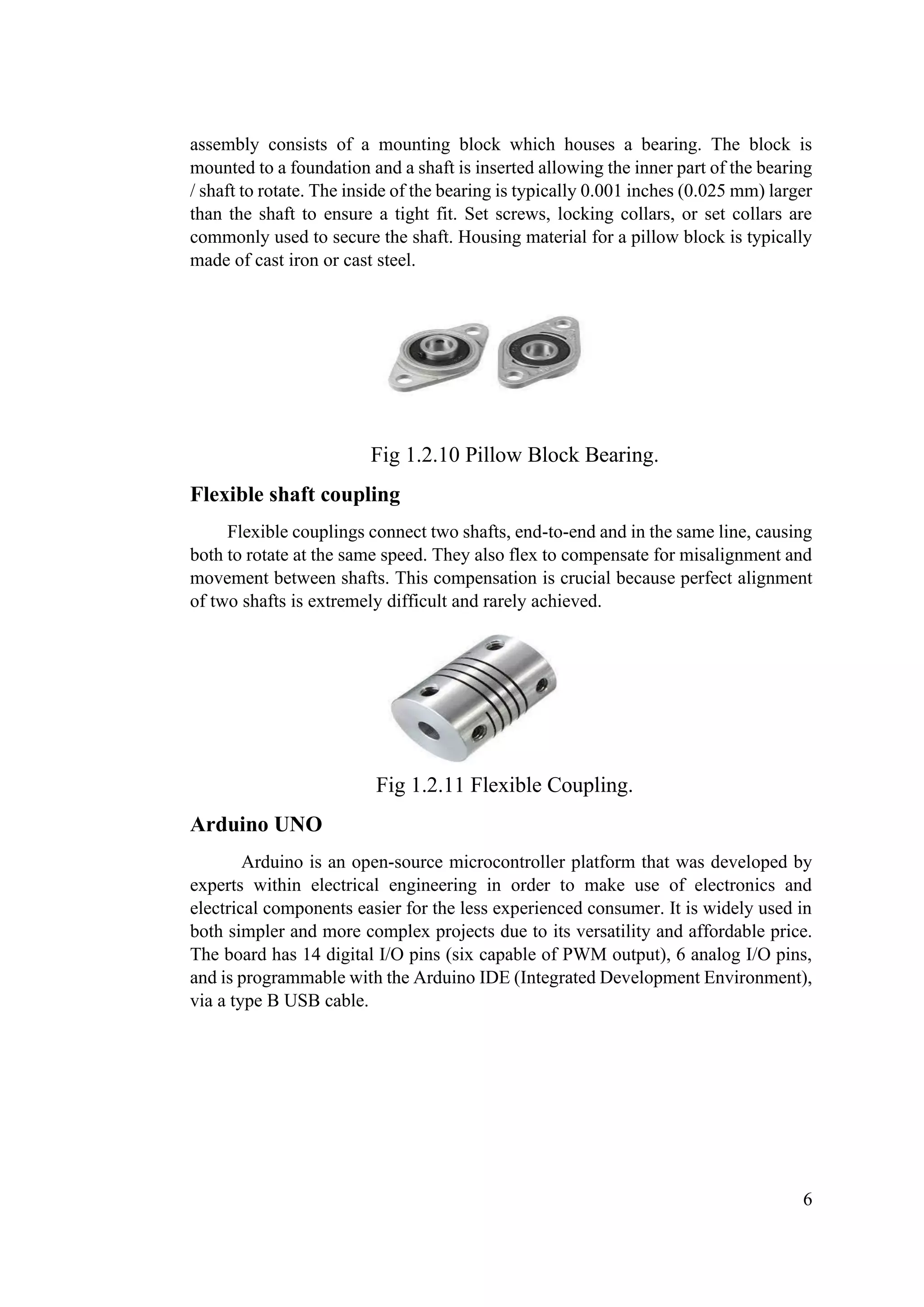
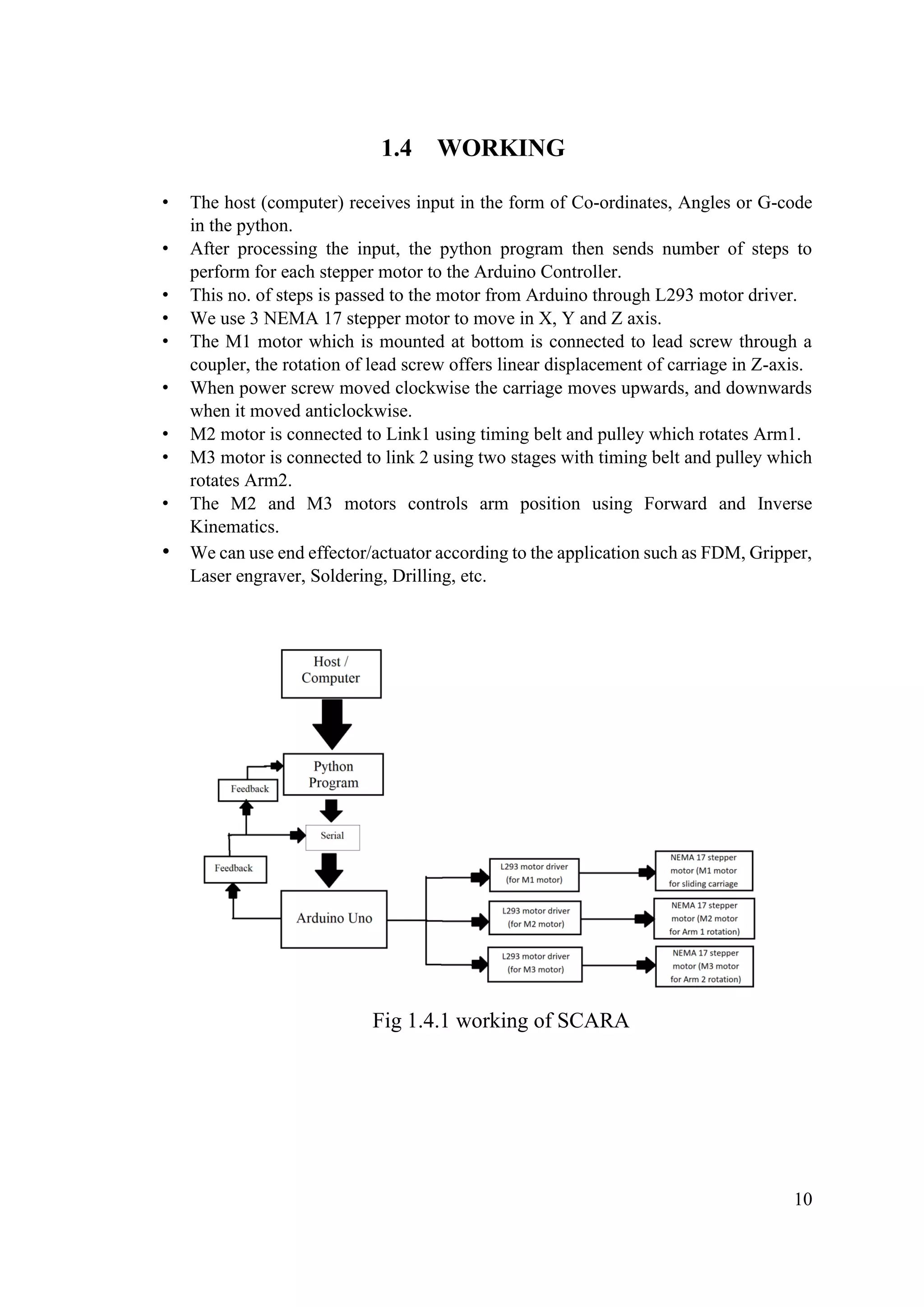
Therefore, Design is safe.
Total Weight
Component Quantity Total Weight
Linear bearings 3 0.077
Nut 1 0.012
Coupler 1 0.015
Carriage 2 0.019
Offset 1 0.001
Motors 2 0.446
Bearings 2 0.061
Pulleys 2 0.006
FDM 1 0.25
Arm 1 1 0.5
Arm 2 1 0.3
Miscellaneous 1 0.813
Total weight 2.5
Total weight (W)= 2.5 N
4.2 Calculation of power screw
Material – 1. Rod- stainless steel, 2. Nut- Brass
Thread type = Square thread
Outer diameter (Do) = 8mm
Length (L) = 500mm
Pitch (P) = 2mm
No. of start (Nt) = single start thread (1)
A] Torque required to rise the load by square threaded screw
1. Mean diameter (Dm) = Do – P/2 = 8 – 2/2 = 7mm
2. Lead angle / helix angle (α)
α = tan-1
(P/πDm) = tan-1
(2/π x 7) = 5.1965o
3. Friction angle (Φ)
Assuming μ = 0.21
μ = tan (Φ)
0.21 = tan (Φ)](https://image.slidesharecdn.com/scarareport-220923134821-19c6366b/75/Design-and-Fabrication-of-a-Selective-Compliance-Articulated-Robot-Arm-SCARA-27-2048.jpg)
![21
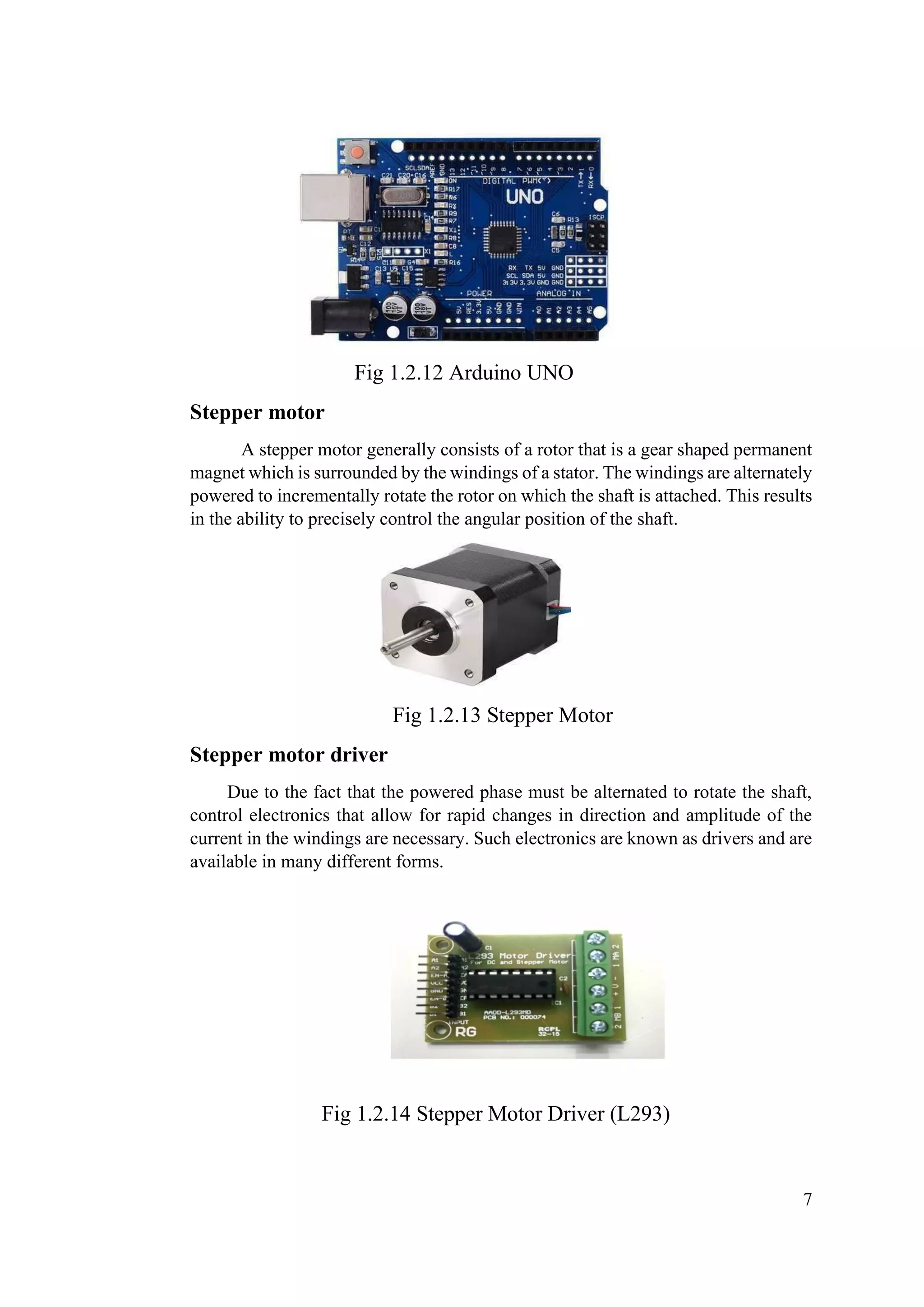
Φ = 11.85o
4. Effort applied at the circumference of the screw to lift the load
P = W tan (α + Φ)
= 2.5 x tan (5.1965 + 11.85)
= 0.7665 N
5. Torque required to overcome friction between the screw and nut
T1 = P x Dm/2 = 0.7665 x 7/2 = 2.6827 Nmm
= 0.26827 Ncm
T1 = 0.02734 Kg.cm
6. Torque required to overcome friction at collar
T2 = 2/3 x μ1 x W [(R3
o - R3
i)/( R2
o - R2
i)] … [assuming uniform pressure
condition]
Ro = Do/2 = 8/2 = 4mm
Di = Dm - P/2 = 7 – 2/2 = 6mm
Ri = Di/2 = 6/2 = 3mm
μ1 for steel and aluminum = 0.35
T2 = 3.0833 Nmm
= 0.30833 Ncm
T2 = 0.03143 Kg.cm
7. Total torque required to overcome friction
T = T1 + T2 = 0.02734 + 0.03143 = 0.05877 Kg.cm
B] Torque required to lower the load by square threaded
screws
1. Effort applied at the circumference of the screw to lower the load
P = W tan (Φ - α) = 2.5 x tan (11.85 – 5.1965)
P = 0.2916 N
2. Torque required to overcome friction between the screw and nut
T1 = P x Dm/2 = 0.2916 x 7/2 = 1.0206 Nmm
= 0.10206 Ncm
T1 = 0.01040 Kgcm](https://image.slidesharecdn.com/scarareport-220923134821-19c6366b/75/Design-and-Fabrication-of-a-Selective-Compliance-Articulated-Robot-Arm-SCARA-28-2048.jpg)
![22
C] Efficiency of square threaded screws
1. By considering screw friction only-
Efficiency (η) = ideal effort (P0)/actual effort (P)
= Wtan (α)/Wtan (α + Φ)
= 0.2273/0.7665
η = 0.2965
2. By considering screw friction and collar friction-
Efficiency (η) = torque required to move load, neglecting friction / torque
required to move the load, including screw and nut friction
= 0.2273 x 3.5 / 0.7665 x 3.5 + 0.35 x 2.5 x 3.5
η = 0.1384
Maximum efficiency of a square threaded screw-
η max = 1 – sin (Φ) / 1+ sin (Φ)
= 1 – sin (11.85) / 1 + sin (11.85)
η max = 0.6592
Stress calculation: -
1. Direct stress (σc): -
σc = 2.5/π/4 x (Dc)2
= 2.5/π/4 x (6)2
= 0.08841 N/mm2
2. Shear stress (τ): -
τ = 16T/ π(Dc)3
= 16 x 490.5/ π (6)3
= 11.5652 N/mm2
3. Max shear stress in the screw (τmax): -
τmax = 1/2 x √ {(σc)2
+ 4 τ2
}
= 1/2 √ {(0.0884)2
+ 4(11.5652)2
}
= 11.5652 N/mm2](https://image.slidesharecdn.com/scarareport-220923134821-19c6366b/75/Design-and-Fabrication-of-a-Selective-Compliance-Articulated-Robot-Arm-SCARA-29-2048.jpg)
![23
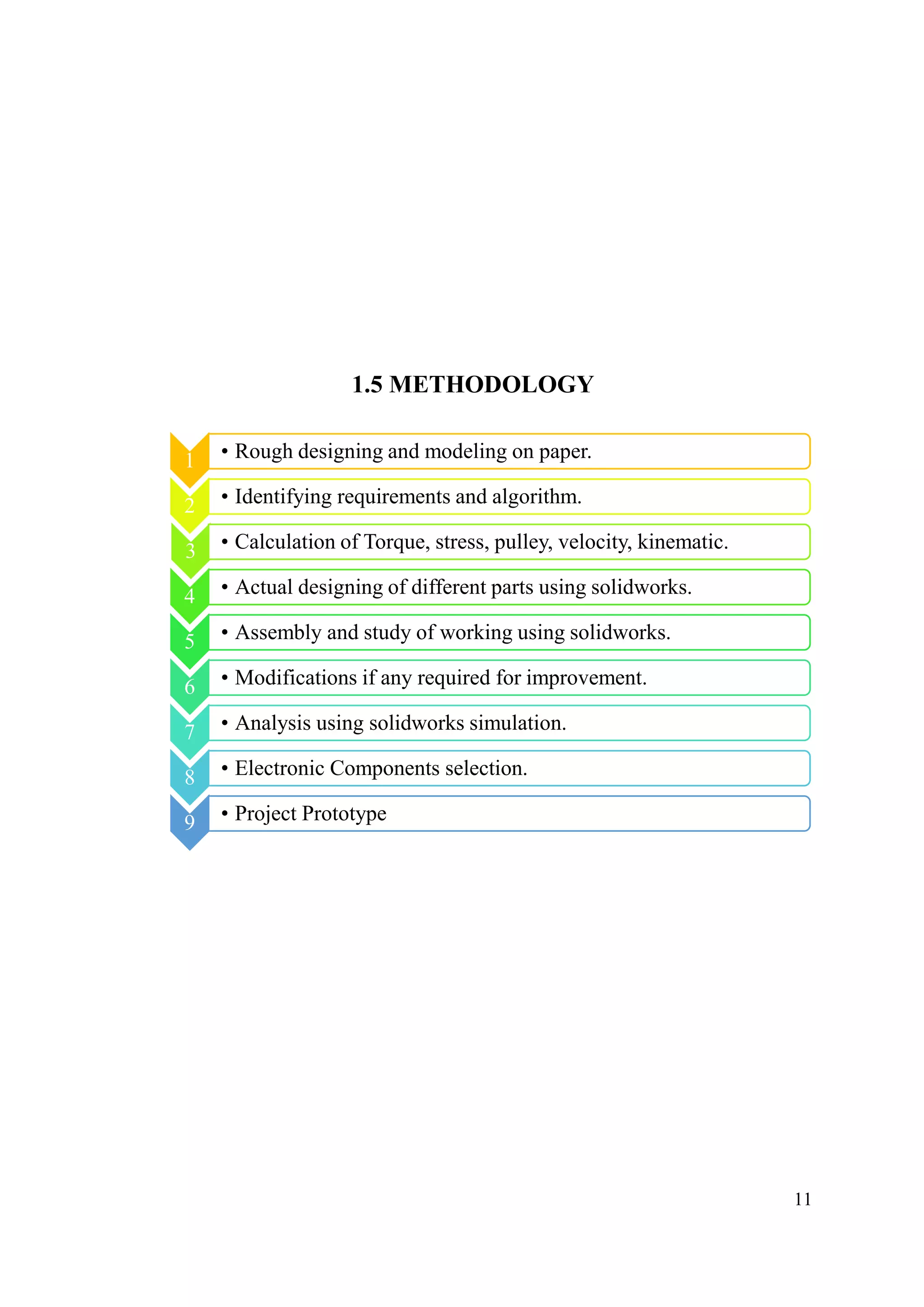
4.3 Calculation for length of belt
Fig 4.3.1 Calculations for belt
Belt Length Calculation for Link 1
Sin (β) = D x d / 2C = 35.5 – 12 / 2 x 30
β = 23.05 °
Angle of wrap
αs = (180 - 2 β) = (180 – 2 x 23.05) = 133.9°
αb= (180 + 2 β) = (180 + 2 x 23.05) = 226.1°
Length of belt
L = 2C + [ π (D + d) / 2] + [ (D - d)2
/ 4C]
= 2 x 30 + [ 3.14 (35.5 + 12) / 2] + [(35.5 - 12) / 4 x 30]
= 139.2149 mm
Belt Length Calculation for Link 2
Sin β = D – d / 2C = 27.5 – 18.5 / 2 x 150
β = 1.71°
Angle of Wrap](https://image.slidesharecdn.com/scarareport-220923134821-19c6366b/75/Design-and-Fabrication-of-a-Selective-Compliance-Articulated-Robot-Arm-SCARA-30-2048.jpg)
![24
αs = (180 - 2 β) = (180 – 2 x 1.71) = 176.58°
αb= (180 + 2 β) = (180 + 2 x 1.71) = 183.42°
Length of Belt
L = 2C + [ π (D + d) / 2] + [ (D - d)2
/ 4C]
= 2 x 150 + [3.14(27.5 + 18.5) / 2] + [(27.5 – 18.5)2
/ 4 x150]
= 372.39 mm
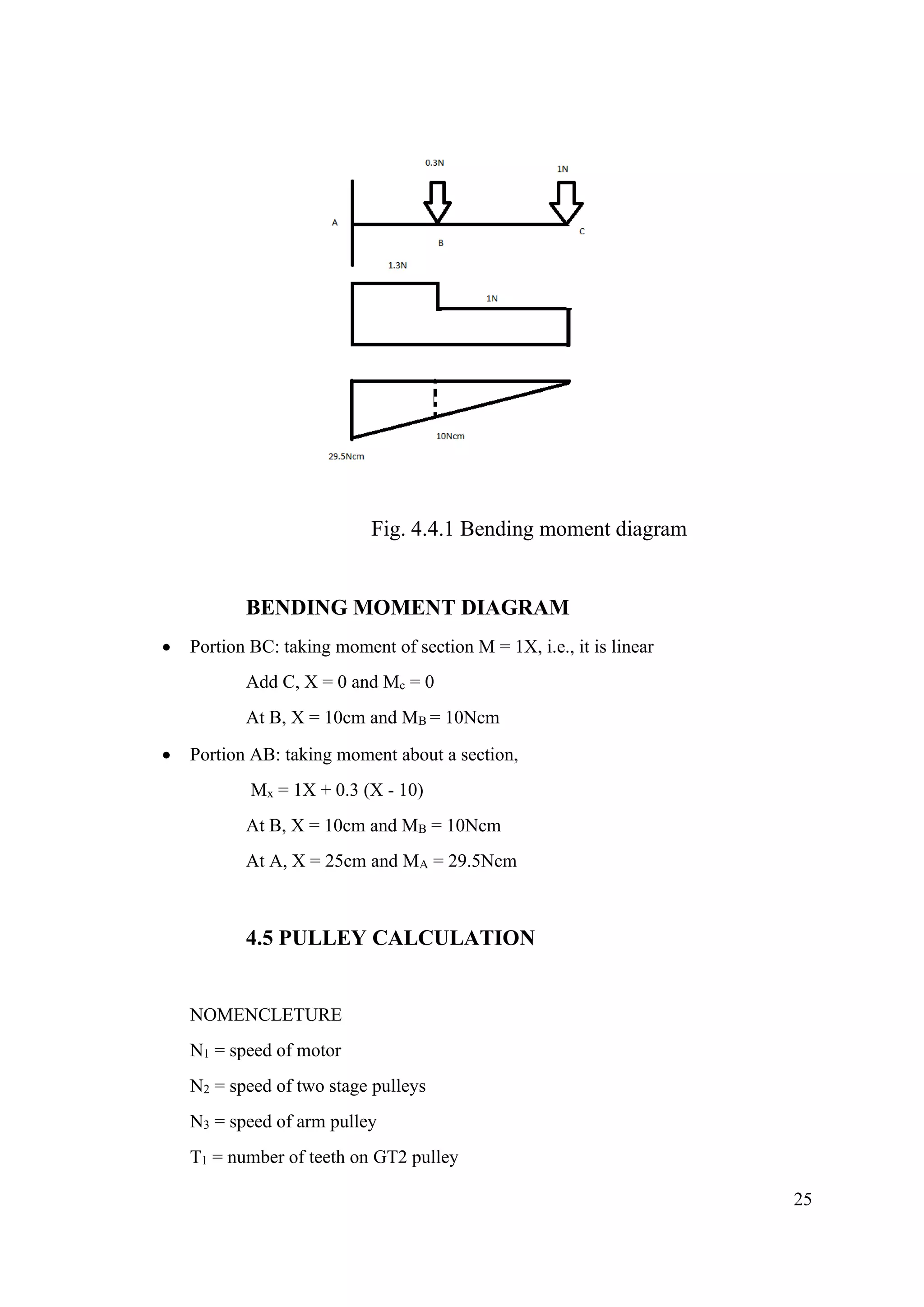
4.4 Shear force and bending moment
SHEAR FORCE DIAGRAM
• Portion BC
Consider a section at a distance x from the free end. The force to the right of
the section, Fx = 1N
It is constant between B and C
• Similarly, for portion AB
Fx = 1 + 0.3 = 1.3N …. (constant)
Thus, shear stress diagram consists of several rectangles having different
ordinates.
It can be observed that the shear force undergoes a sudden change in passing
through a load point.](https://image.slidesharecdn.com/scarareport-220923134821-19c6366b/75/Design-and-Fabrication-of-a-Selective-Compliance-Articulated-Robot-Arm-SCARA-31-2048.jpg)
![26
T2 = number of teeth on double pulley (larger pulley)
T3 = number of teeth on double pulley (smaller pulley)
T4 = number of teeth on arm pulley
PULLEY Ratios
• For Arm 1
N2/N1 = T1/T2
N2 = N1 x (T1/T2)
N2 = N1 x (20/56)
𝐴𝑟𝑚 1 𝑎𝑛𝑔𝑙𝑒 (𝜃)
𝑚𝑜𝑡𝑜𝑟 2 𝑟𝑜𝑡𝑎𝑡𝑖𝑜𝑛 𝑎𝑛𝑔𝑙𝑒
=
𝑇1
𝑇2
Motor 2 rotation angle = Arm 1 angle (θ) *
𝑇2
𝑇1
Motor 2 rotation angle = Arm 1 angle (θ) *
56
20
motor2.step() = [Arm 1 angle (θ) ∗
56
20
] / 1.8
• For Arm 2
N3/N2 = T2/T3
N3 = N2 x (T2/T3)
N3 = N1 x (20/56) x (29/44)
N3 = N1 x (145/616)
N3/N1 = 145/616
𝐴𝑟𝑚 2 𝑎𝑛𝑔𝑙𝑒 (𝛽)
𝑚𝑜𝑡𝑜𝑟 3 𝑟𝑜𝑡𝑎𝑡𝑖𝑜𝑛 𝑎𝑛𝑔𝑙𝑒
=
𝑇1
𝑇2
*
𝑇3
𝑇4
Motor 3 rotation angle = 𝐴𝑟𝑚 2 𝑎𝑛𝑔𝑙𝑒 (𝛽) *
𝑇2
𝑇1
*
𝑇4
𝑇3
Motor 3 rotation angle = 𝐴𝑟𝑚 2 𝑎𝑛𝑔𝑙𝑒 (𝛽) *
56
20
*
44
29
motor3.step() = [𝐴𝑟𝑚 2 𝑎𝑛𝑔𝑙𝑒 (𝛽) ∗
56
20
∗
44
29
] / 1.8](https://image.slidesharecdn.com/scarareport-220923134821-19c6366b/75/Design-and-Fabrication-of-a-Selective-Compliance-Articulated-Robot-Arm-SCARA-33-2048.jpg)
![28
Trans zn – 1 (dn) = [
1 0 0 0
0 1 0 0
0 0 1 𝑑ₙ
0 0 0 1
]
Rot zn – 1 (θn) = [
𝑐𝑜𝑠𝜃ₙ − 𝑠𝑖𝑛𝜃ₙ 0 0
𝑠𝑖𝑛𝜃ₙ 𝑐𝑜𝑠𝜃ₙ 0 0
0 0 1 0
0 0 0 1
]
Trans zn (rn) = [
1 0 0 𝑟ₙ
0 1 0 0
0 0 1 0
0 0 0 1
]
Rot zn (αn) = [
1 0 0 0
0 𝑐𝑜𝑠𝛼ₙ −𝑠𝑖𝑛𝛼ₙ 0
0 𝑠𝑖𝑛𝛼ₙ 𝑐𝑜𝑠𝛼ₙ 0
0 0 0 1
]
This gives:
n – 1
Tn = [
𝑐𝑜𝑠𝜃ₙ −𝑠𝑖𝑛𝜃ₙ𝑐𝑜𝑠𝛼ₙ 𝑠𝑖𝑛𝜃ₙ𝑐𝑜𝑠𝛼ₙ 𝑟ₙ𝑐𝑜𝑠𝜃ₙ
𝑠𝑖𝑛𝜃ₙ 𝑐𝑜𝑠𝜃ₙ𝑐𝑜𝑠𝛼ₙ −𝑐𝑜𝑠𝜃ₙ𝑠𝑖𝑛𝛼ₙ 𝑟ₙ𝑠𝑖𝑛𝜃ₙ
0 𝑠𝑖𝑛𝛼ₙ 𝑐𝑜𝑠𝛼ₙ 𝑑ₙ
0 0 0 1
]=[ 𝑅 𝑇
0 0 0 1
]
By nature of the SCARA's joint layout, the arm is slightly compliant in the X-Y
direction but rigid in the Z direction which make kinematic calculation simpler by
reducing complexity of 3D Geometric Transformation to 2D Geometric
Transformations](https://image.slidesharecdn.com/scarareport-220923134821-19c6366b/75/Design-and-Fabrication-of-a-Selective-Compliance-Articulated-Robot-Arm-SCARA-35-2048.jpg)
![30
Forward Kinematics
By 2D Geometric Transformations:-
∴ For [E (x, y)] = x = (R1) (cosα1) + (R2) (cosα2)
x = (150) (cos {50}) + (100) (cos {50})
x = 32.139
y = (R1) (sinα1) + (R2) (sinα2)
y = (150) (sin {50}) + (100) (sin {50})
y = 191.51118
∴ E (x, y) = (32.139, 191.51118)
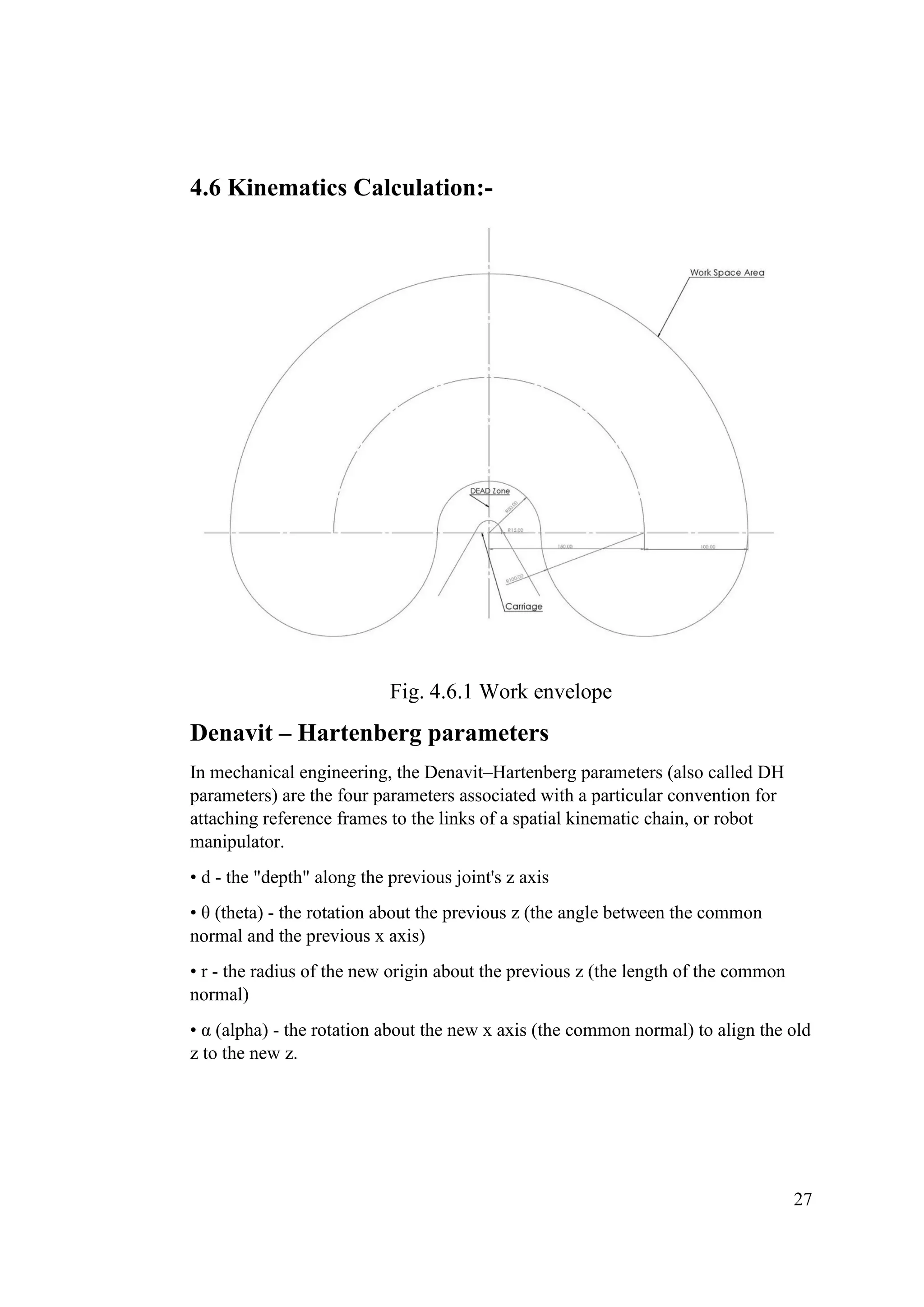
Fig. 4.6.3 Forward kinematics (a)](https://image.slidesharecdn.com/scarareport-220923134821-19c6366b/75/Design-and-Fabrication-of-a-Selective-Compliance-Articulated-Robot-Arm-SCARA-37-2048.jpg)
![31
• Sample Calculation to Rotate both Arms clockwise 20°
i.e., θ = -20°
β = -20°
• For arm 1
[A'] = [Rh] [A]
Where,
[Rh] = [
𝑐𝑜𝑠𝜃 −sin𝜃
𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜃
] , [A] = [
𝑅₁𝑐𝑜𝑠𝛼₁
𝑅₁𝑠𝑖𝑛𝛼₁
] 𝑖. 𝑒. {
𝑥₀
𝑦₀}
∴ [A'] = [
𝑐𝑜𝑠(−20) −sin (−20)
𝑠𝑖𝑛(−20) 𝑐𝑜𝑠(−20)
] [
𝑅₁cos (50)
𝑅₁sin (50)
]
∴ [A'] = [
129.9038
75
]i.e. {
𝑥₀′
𝑦₀′
}
∴ For [E' (x', y') ]
x = [R1cos (α1 + θ)] ± [R2cos(α2)]
x = [150 x cos (50 + {-20})] ± [100 x cos (50)]
x = 65.6250496
y = [R1sin (α1 + θ)] ± [R2sin(α2)]
y = [150 x sin (50 + {-20})] ± [100 x sin (50)]
y = 151.6044443
∴ E' (x', y') = (65.6250496, 151.604443)
• For arm 2
∴ With end points A' = (129.9038,75) and ∴ E'= (65.6250496, 151.604443)](https://image.slidesharecdn.com/scarareport-220923134821-19c6366b/75/Design-and-Fabrication-of-a-Selective-Compliance-Articulated-Robot-Arm-SCARA-38-2048.jpg)
![32
Fig. 4.6.4 Forward kinematics (b)
[Th] = [A'] [-1]
= [
129.9038
75
][-1]
∴ [Th] = [
−129.9038
−75
]
[A'T] = [A']+ [Th]
= [
129.9038
75
] + [
−129.9038
−75
]
∴ [A'T] = [
0
0
]
[E'T ] = [E'] + [Th]
= [
65.6250436
151.604443
] + [
−129.9038
−75
]
∴ [E'T] = [
−64.2787504
76.6044443
]
[Rh] = [
𝑐𝑜𝑠𝛽 −sin𝛽
𝑠𝑖𝑛𝛽 𝑐𝑜𝑠𝛽
]](https://image.slidesharecdn.com/scarareport-220923134821-19c6366b/75/Design-and-Fabrication-of-a-Selective-Compliance-Articulated-Robot-Arm-SCARA-39-2048.jpg)
![33
∴ [Rh] = [
cos (−20) −sin (−20)
sin (−20) cos (−20)
]
[E''T] = [Rh] [E'T]
= [
cos (−20) −sin (−20)
sin (−20) cos (−20)
] [
−64.2787504
76.6044443
]
∴ [E''T] = [
−34.20200441
93.96925845
]
[Th'] = [A']
∴ [Th'] = [
129.9038
75
]
[A'] = [A'T] + [Th']
∴ [A'] = [
129.9038
75
]i.e. {
𝑥₀′
𝑦₀′
}
[E''] = [E''T] + [Th']
= [
−34.20200441
93.96925845
] + [
129.9038
75
]
∴ [E''] = [
95.7017979559
169.9692585
]
Where E''(95.7, 169.96) is End effector co-ordinate after rotating arm 1 by θ and arm 2 by
β
∴ For [E''(x, y)] = x = (R1) (cosα1 + θ) + (R2) (cosα2 + 𝛽)
x = (150) (cos {50 + (-20)}) + (100) (cos {130 + (-20)})
x = 95.701796
y = (R1) (sinα1 + θ) + (R2) (sinα2 + 𝛽)
y = (150) (sin {50 + (-20)}) + (100) (sin {130 + (-20)})
y = 168.96926
∴ E''(x, y) = (95.701796, 168.96926)
i.e. [E''] = [
cos (α1 + θ) 𝑐𝑜𝑠 (α2 + 𝛽)
sin (α1 + θ) sin (α2 + 𝛽)
] [
𝑅1
𝑅2
]
Inverse Kinematics
Keeping same α 1 = 50° and α 2 = 130°
And have to move End Effector to (x, y) = (95.701796, 168.96926)](https://image.slidesharecdn.com/scarareport-220923134821-19c6366b/75/Design-and-Fabrication-of-a-Selective-Compliance-Articulated-Robot-Arm-SCARA-40-2048.jpg)
![34
Current End effector Position is i.e., E (x, y) = (32.139, 191.51118)
Fig. 4.6.5 inverse kinematics
λ = tan-1
[
𝑌
𝑋
]
λ = tan-1
[
168.96926
95.701796
]](https://image.slidesharecdn.com/scarareport-220923134821-19c6366b/75/Design-and-Fabrication-of-a-Selective-Compliance-Articulated-Robot-Arm-SCARA-41-2048.jpg)
![35
∴ λ = 60.4734°
Diagonal length between end effector point and origin
i.e. OE'' = √𝑌2 + 𝑋2
OE'' = √168.969262 + 95.7017962
∴ OE'' = 194.1891mm
∠ E''OA = cos-1
[OE′′2
+ 𝑅12
+ 𝑅22
2 𝑥 OE′′
𝑥 𝑅1
]
∴ (α1 + θ) = λ - ∠ E''OA
= tan-1
[
𝑌
𝑋
] - cos-1
[OE′′2
+ 𝑅12
+ 𝑅22
2 𝑥 OE′′
𝑥 𝑅1
]
= tan-1
[
168.96926
95.701796
] - cos-1
[194.18912
+ 1502
+ 1002
2 𝑥 194.1891 𝑥 150
]
∴ (α1 + θ) = 30°
∴ θ = 30° - α1
∴ θ = 30° - 50°
= -20°
Similarly
∴ (α2 + β) = λ + ∠ E''OA
= tan-1
[
𝑌
𝑋
] + cos-1
[OE′′2
+ 𝑅12
+ 𝑅22
2 𝑥 OE′′
𝑥 𝑅2
]
= tan-1
[
168.96926
95.701796
] - cos-1
[194.18912
+ 1502
+ 1002
2 𝑥 194.1891 𝑥 100
]
∴ (α2 + β) = 110°
∴ β = 110° - α2
= 110° - 130°
= -20°
Hence both Arms (1 and 2) rotate clockwise(-ve) 20°](https://image.slidesharecdn.com/scarareport-220923134821-19c6366b/75/Design-and-Fabrication-of-a-Selective-Compliance-Articulated-Robot-Arm-SCARA-42-2048.jpg)

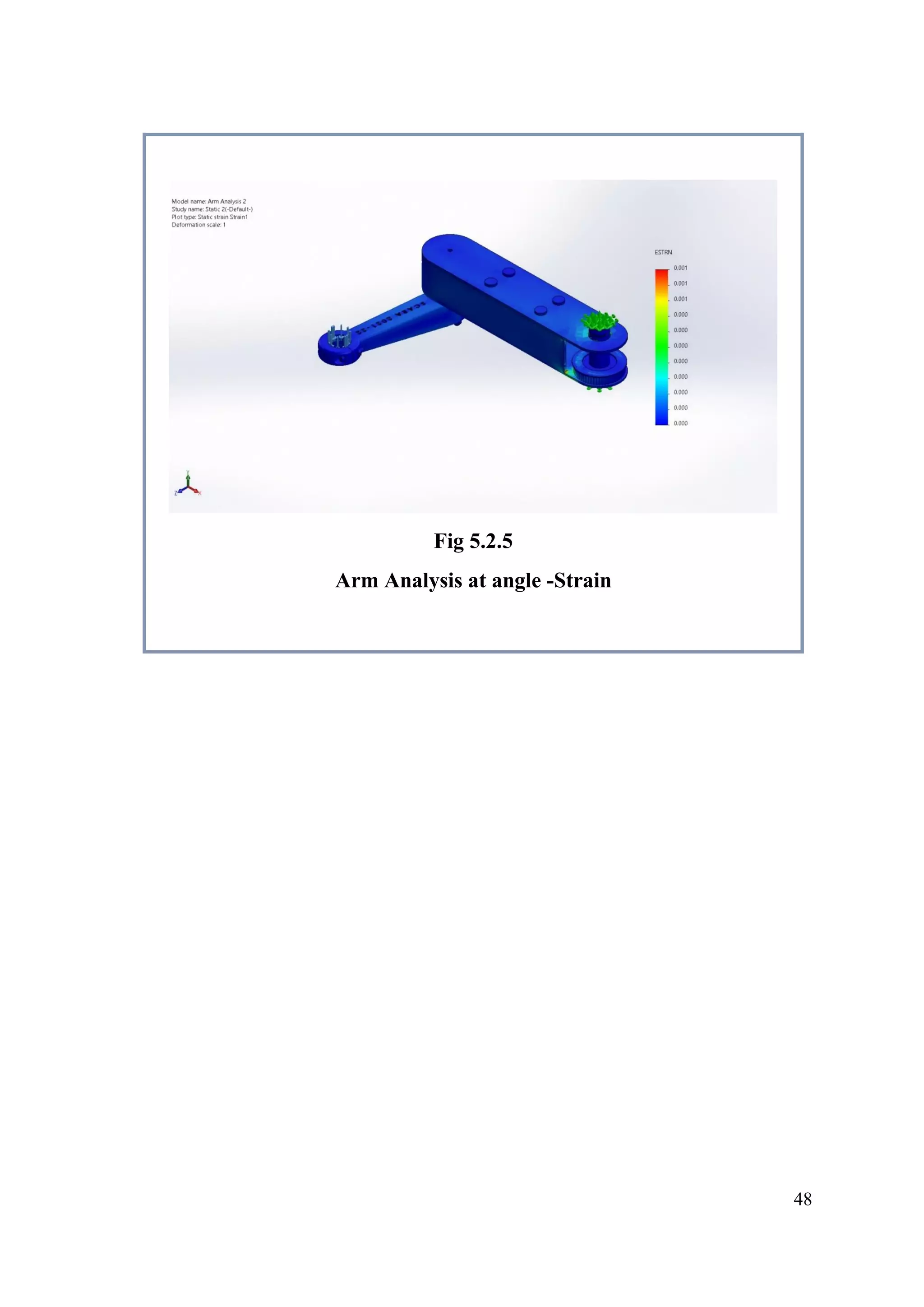


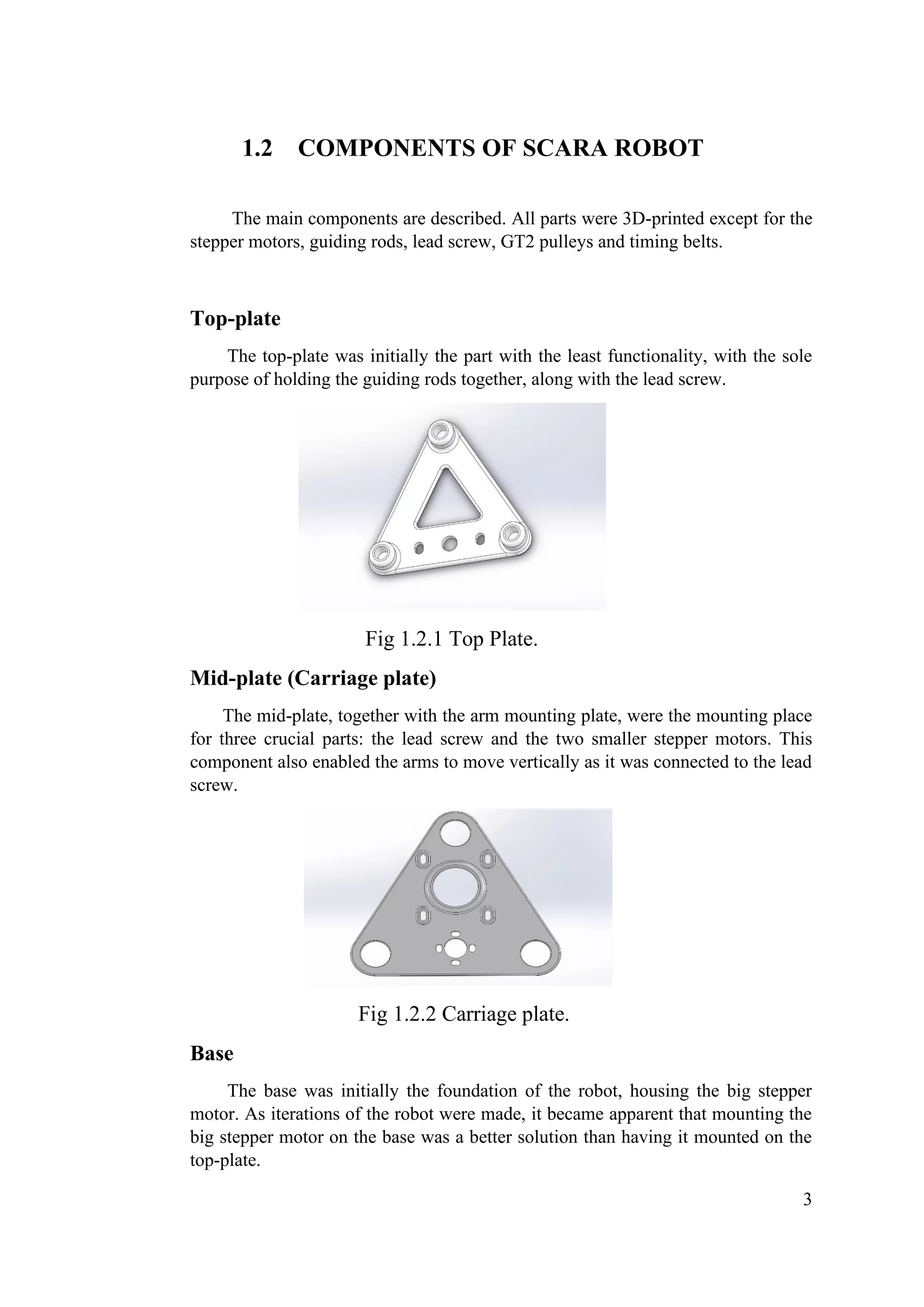
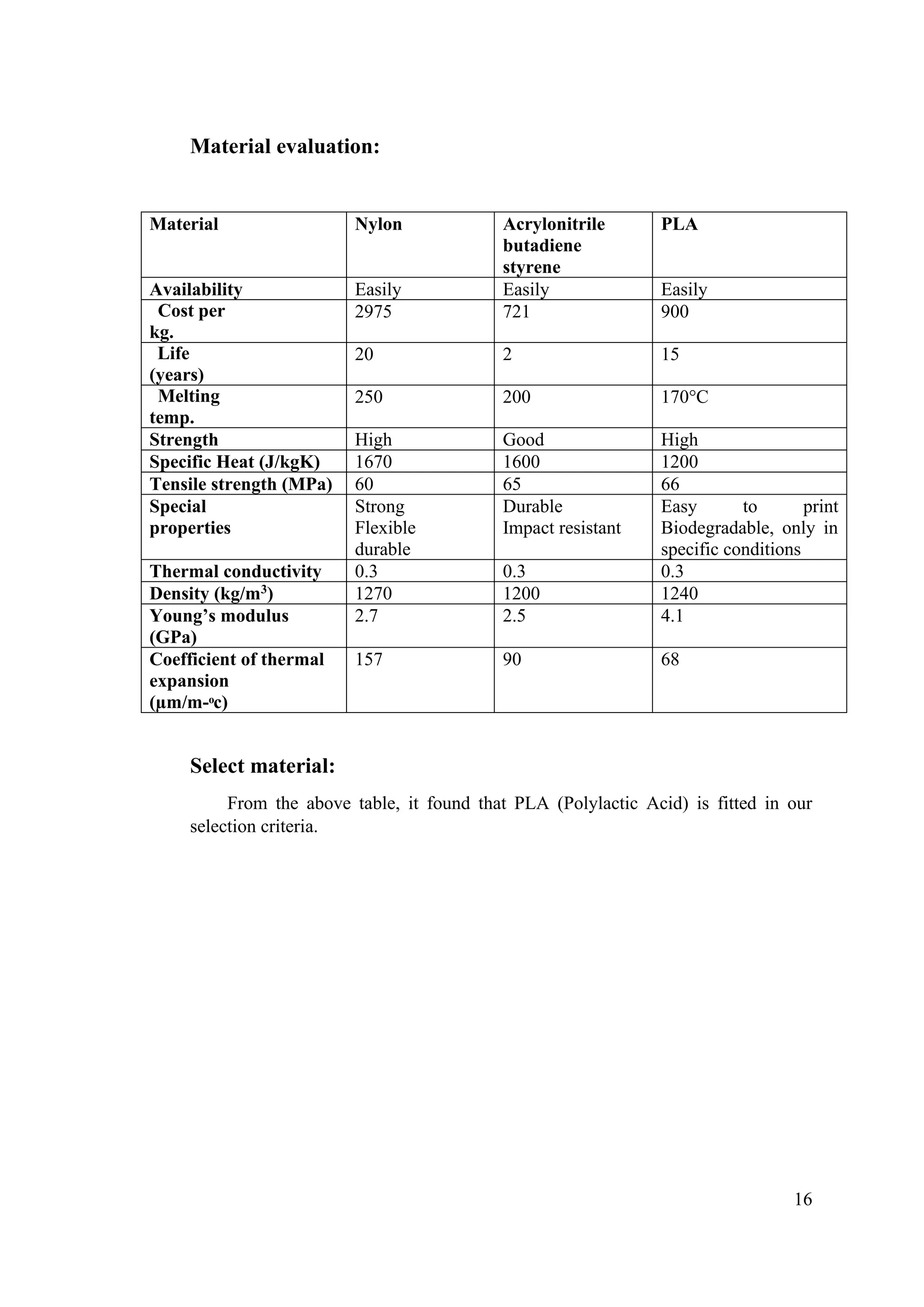
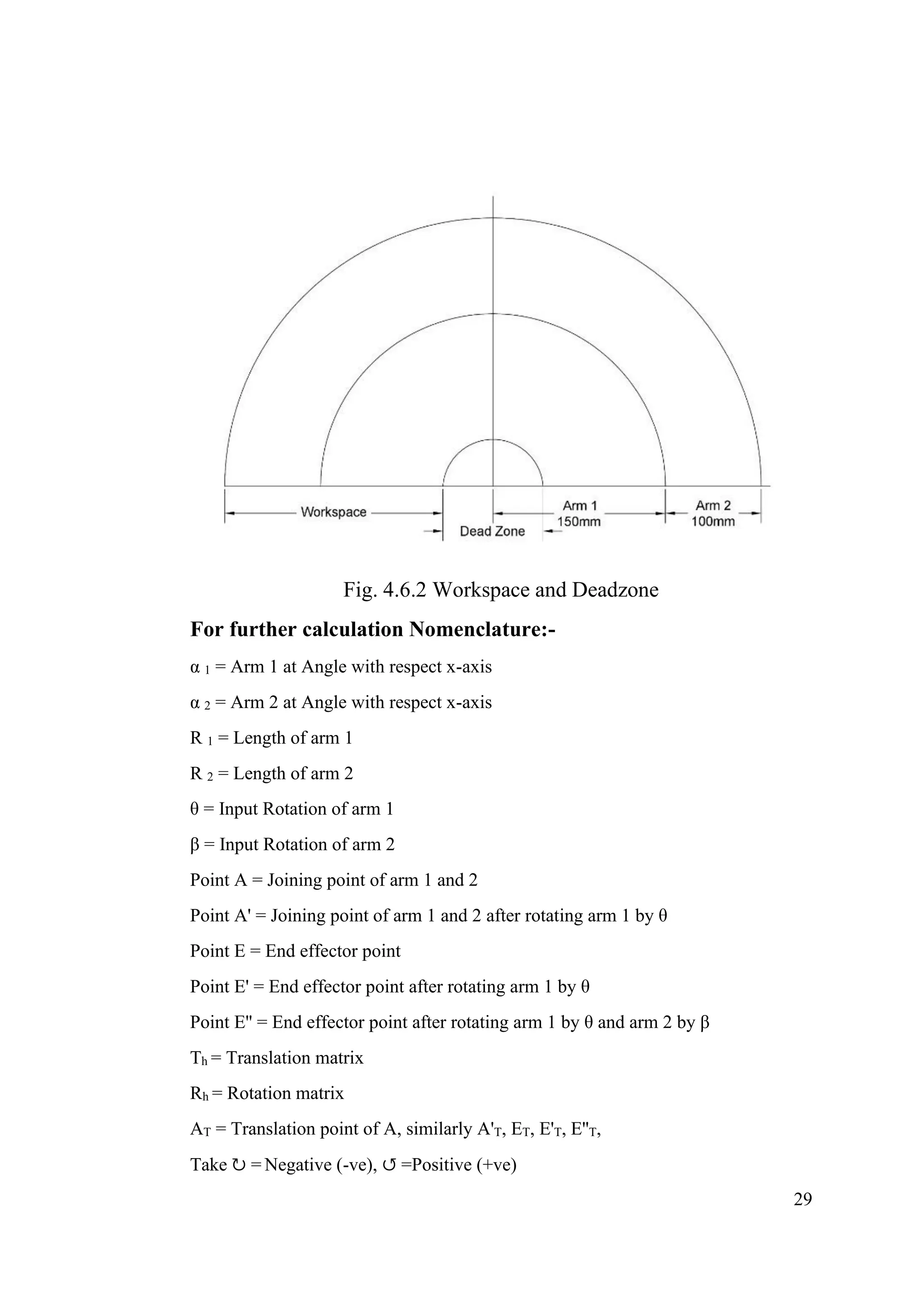
The document is a project report on the design and fabrication of a Selective Compliance Articulated Robot Arm (SCARA) submitted by students under the guidance of a professor. It details the robot's components, construction, working principles, and methodologies used, emphasizing its applications in industrial settings due to its speed and accuracy. The report includes extensive calculations, design modifications, and material considerations, aiming to enhance the robot's functionality and cost-efficiency.