Download as PDF, PPTX












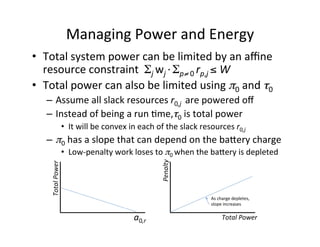







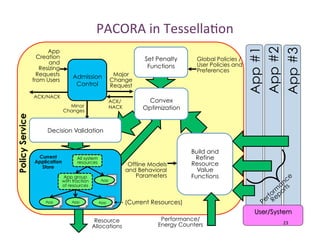



This document discusses resource management for computer operating systems. It argues that traditional OS architecture is outdated given changes in hardware and software. The authors propose an approach where the OS allocates resources like CPU cores, memory, and bandwidth to processes to optimize responsiveness based on penalty functions that model how run time affects user experience. The goal is to continuously minimize the total penalty by adjusting resource allocations over time as user needs and process requirements change.