Downloaded 22 times

![Fixed, Jittered, and Sporadic
Release Times
Fixed: we do know the actual release time ri of each job .
Jitter: we do not know the actual release time ri of each job Ji ; only that ri is in a range [ri− , ri+ ].
Sporadic/aperiodic : they are released at random time instants.
5](https://image.slidesharecdn.com/modelofrealtimesystem-180108102515/85/Reference-Model-of-Real-Time-System-5-320.jpg)
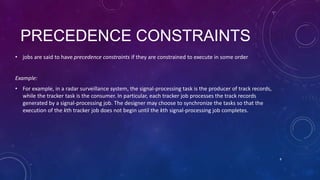

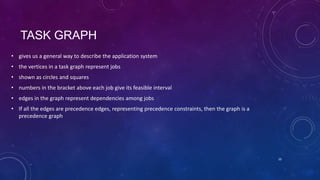

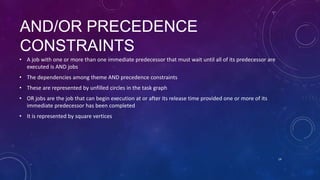



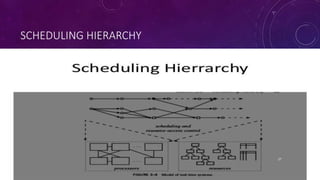


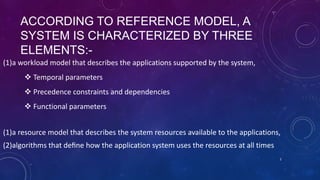
The document presents a model for real-time systems that includes three main elements: a workload model describing the applications and their timing parameters, dependencies, and functional parameters; a resource model describing the available system resources; and scheduling algorithms defining how resources are allocated over time. It discusses different types of real-time tasks and their temporal parameters, dependencies between tasks, and how precedence and resource constraints are represented in task graphs. The document also covers scheduling hierarchy, valid schedules, and performance measures for evaluating real-time schedulers.