
Linux uses a preemptive multilevel feedback queue scheduling algorithm. Processes have both static priorities based on nice values and dynamic priorities based on recent CPU usage. The scheduler selects from two lists of active and expired processes using their dynamic priorities. It also performs load balancing across CPU runqueues to improve performance on multiprocessor systems. System calls like setpriority(), sched_setscheduler(), and sched_yield() allow modifying process priorities and scheduling policies.
Introduces process scheduling in Linux, outlines scheduling policies, algorithms, and related system calls.
Discusses scheduling policy based on time-sharing and priority, classifying processes into interactive, batch, and real-time.
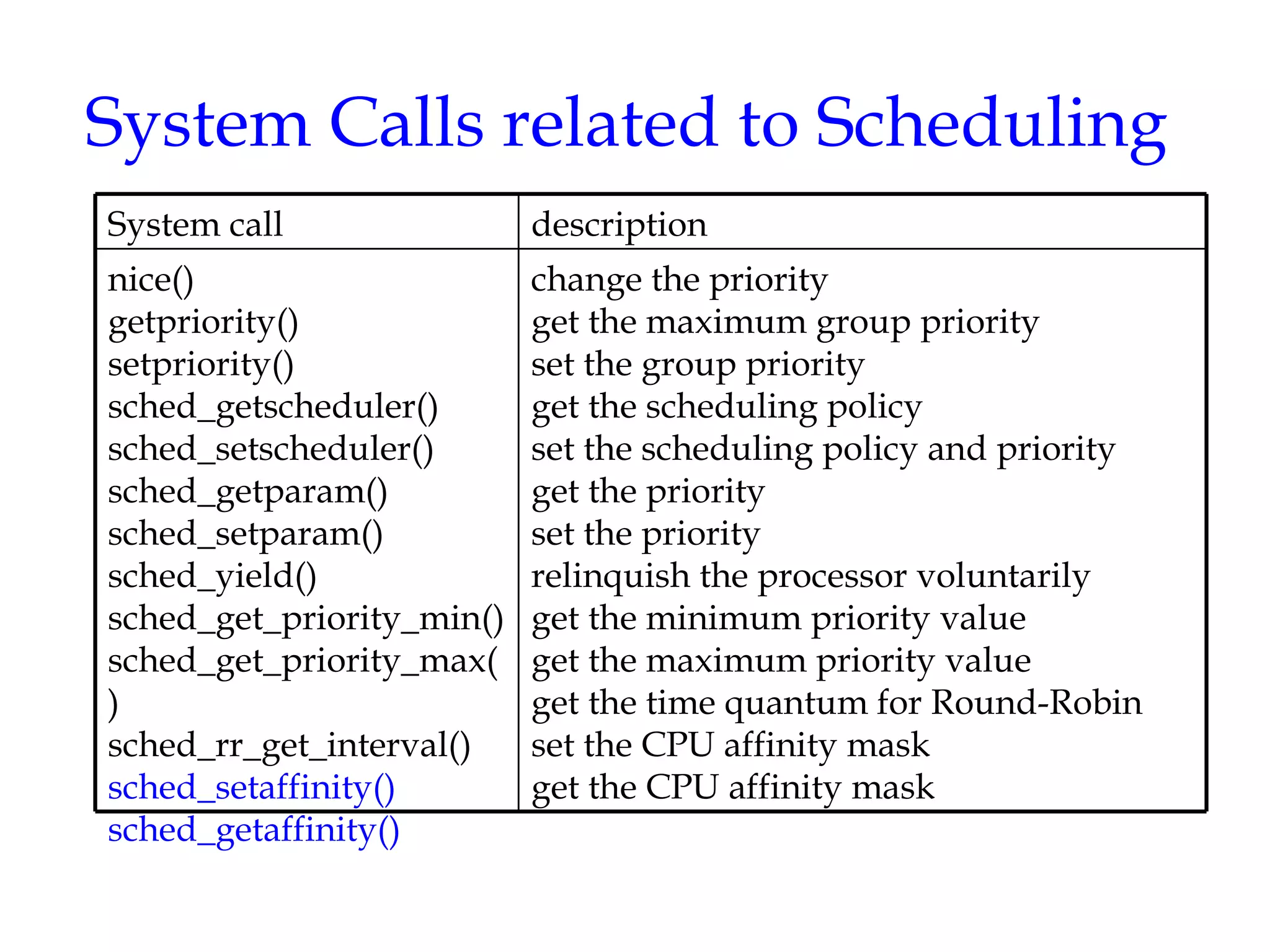
Lists system calls related to scheduling, including changing priorities and managing CPU affinity.
Explains preemption, the process state during preemption, and differences before and after Linux kernel 2.5.
Covers how to determine optimal quantum duration to balance process execution and system responsiveness.
Describes the evolution of scheduling algorithms from simple to complex in Linux 2.6, including scheduling classes.
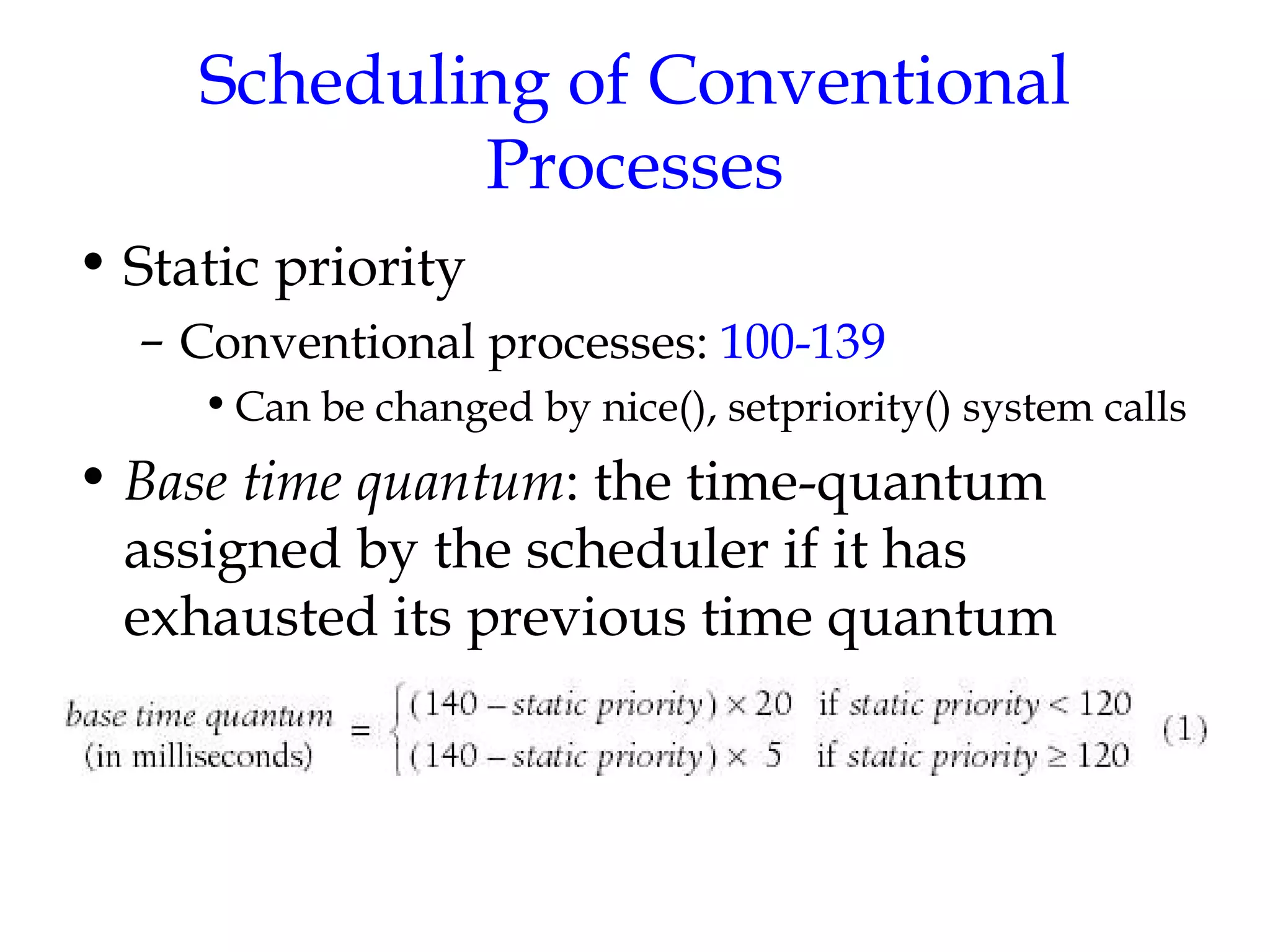
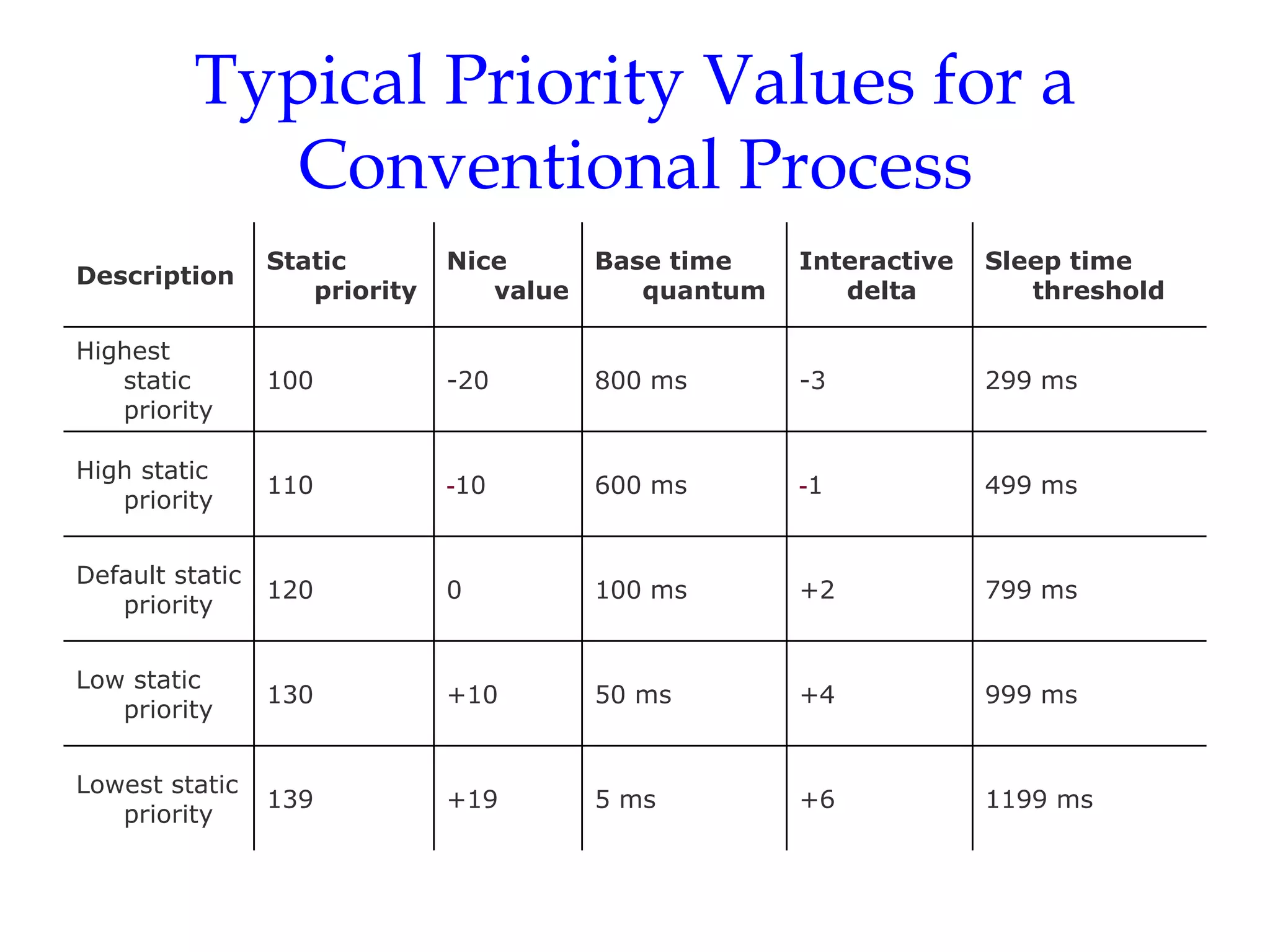
Details static priority values and time quantum assigned to conventional processes.
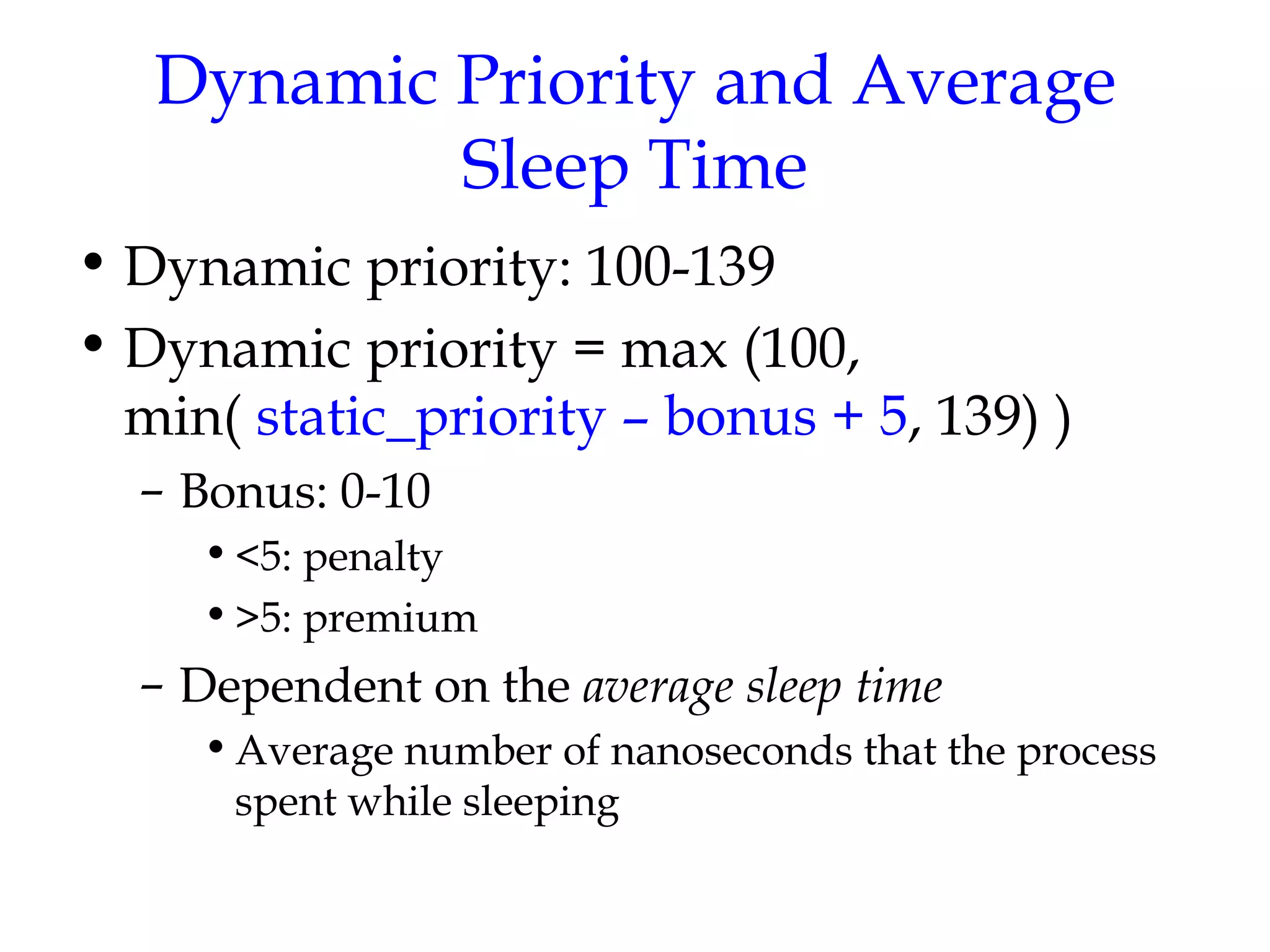
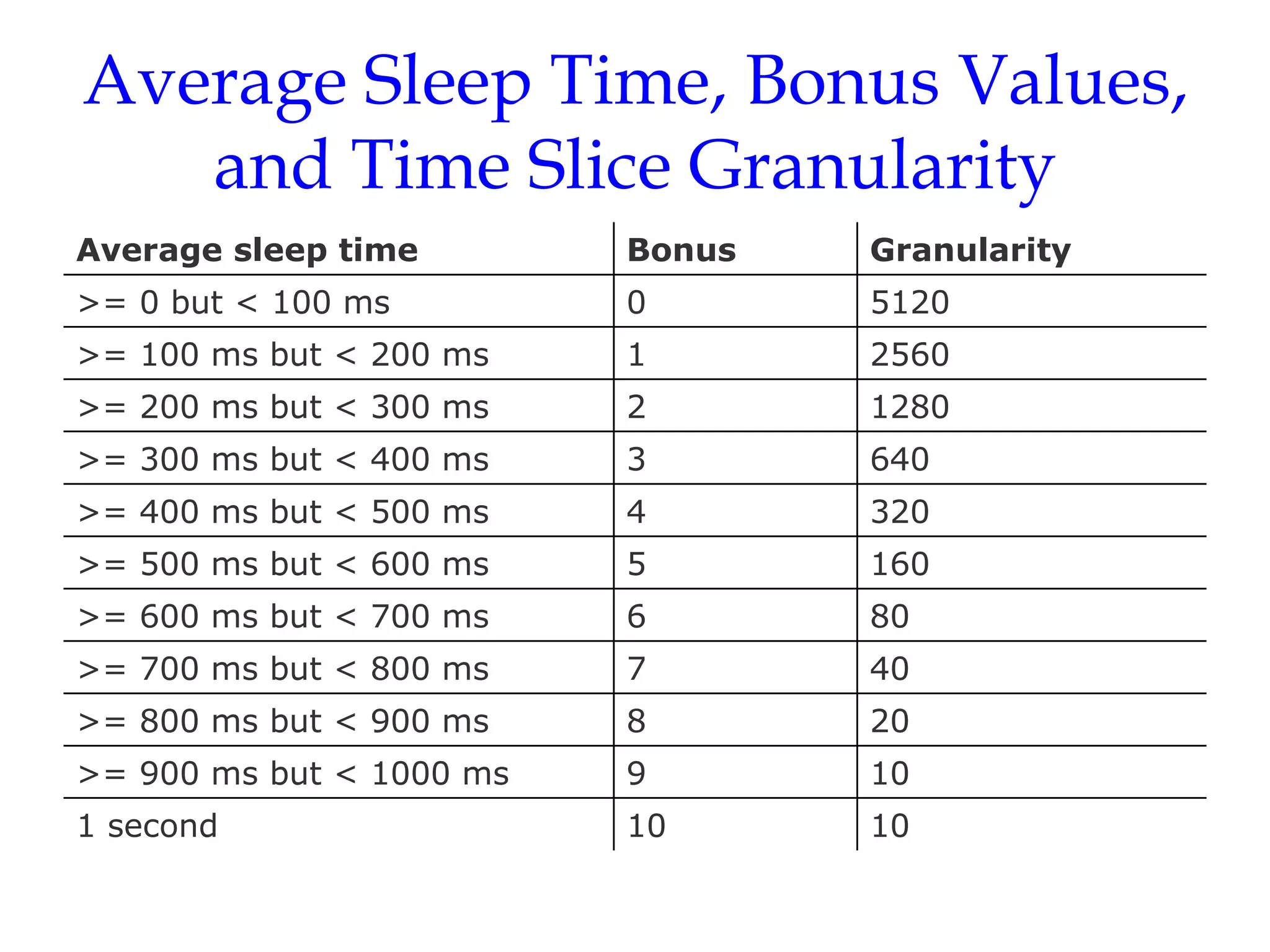
Explains how dynamic priority is calculated based on average sleep time and static priority.
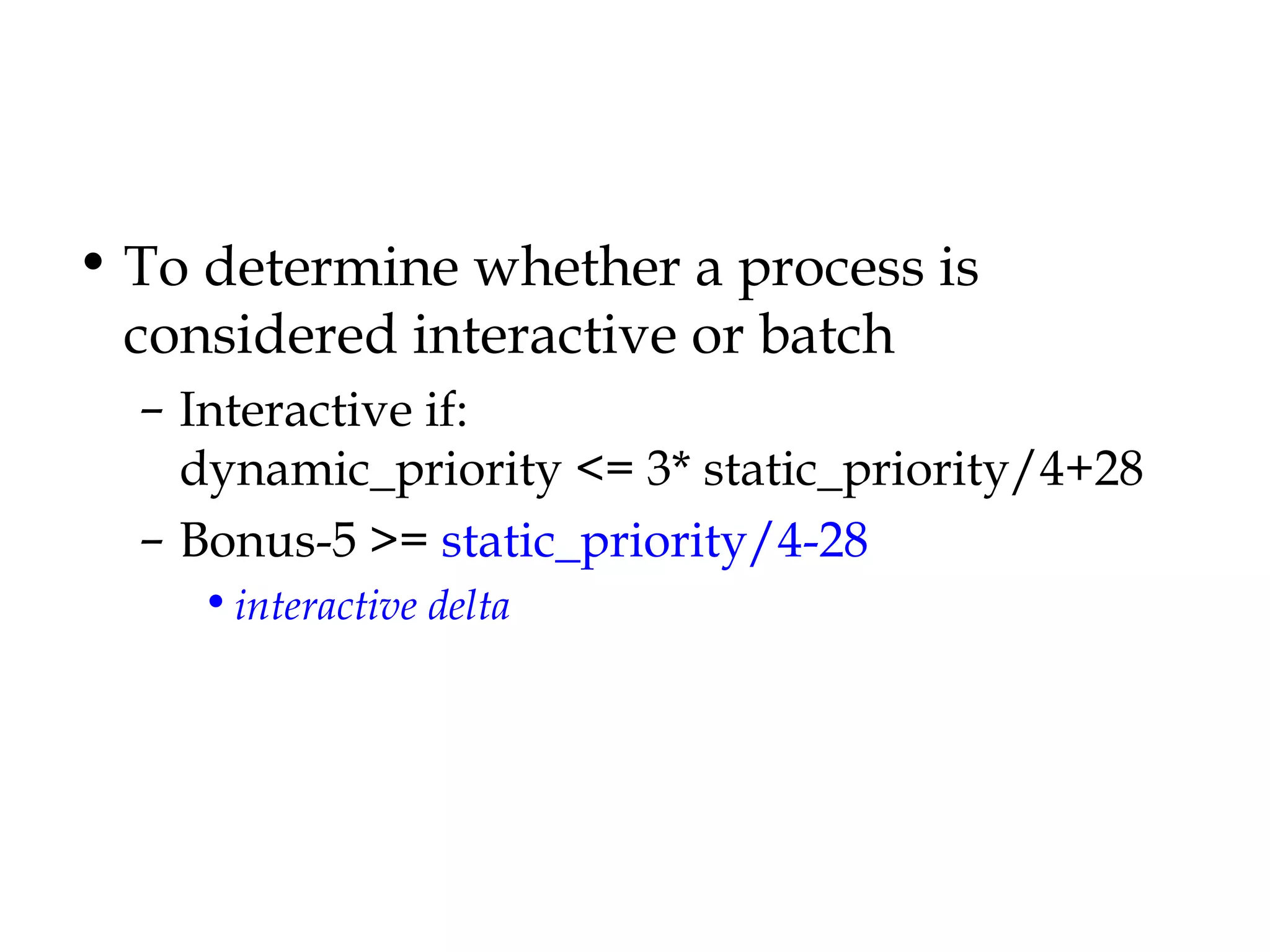
Determines how processes are categorized as interactive or batch based on priority metrics.
Defines active and expired processes, emphasizing their changing roles in scheduling.
Addresses real-time process scheduling, priority, and conditions under which real-time processes operate.
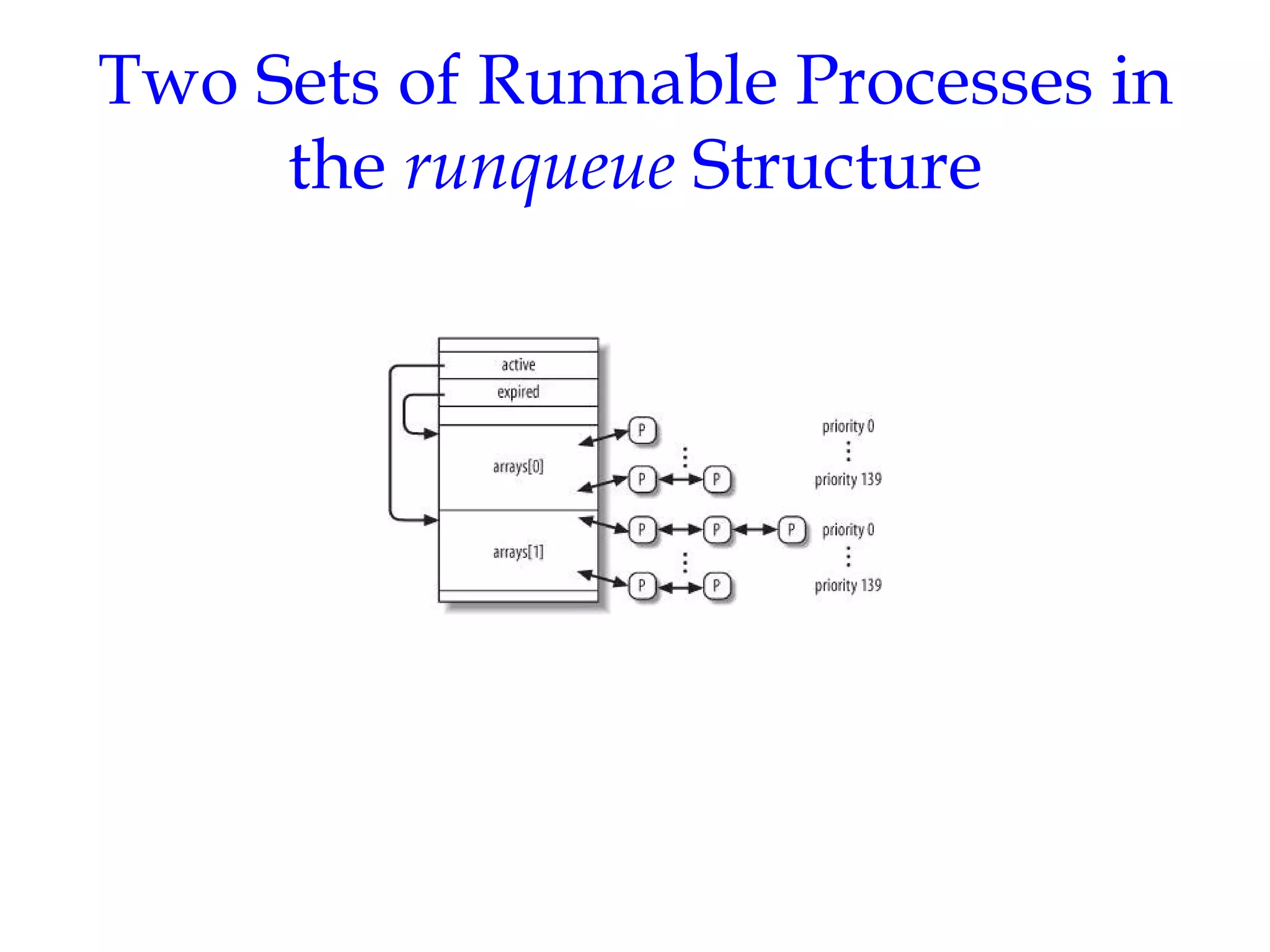
Discusses data structures used by the scheduler, including runqueue and process descriptor fields.
Outlines key functions used by the scheduler for process management, including handling blocking and waking up processes.
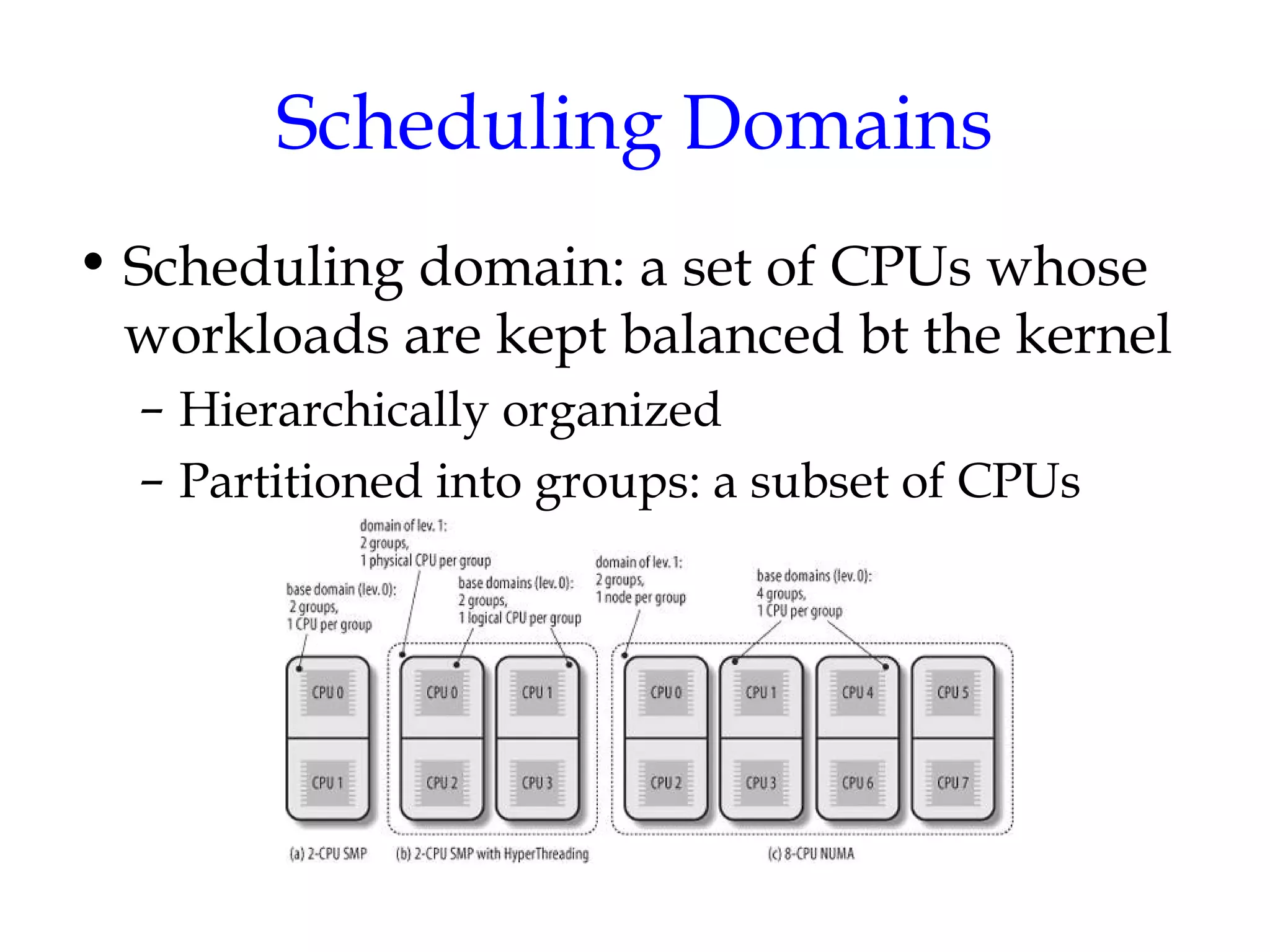
Explains runqueue balancing in multiprocessor systems and the concept of scheduling domains.
Describes system calls for managing scheduling and real-time processes, including priority and CPU affinity management.





































































![Governance, Deployment & Methodologies for Agentic Automation [2/3]](https://cdn.slidesharecdn.com/ss_thumbnails/agenticcommunityseries-day2-251112135038-a386476d-thumbnail.jpg?width=640&height=640&fit=bounds)














