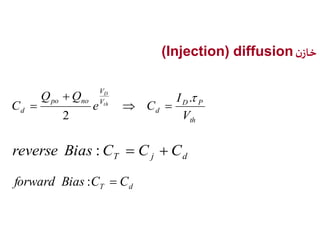
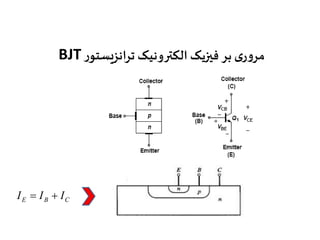
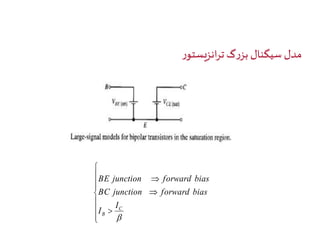
PN مروری برفیزیک الکترونیک پیوند
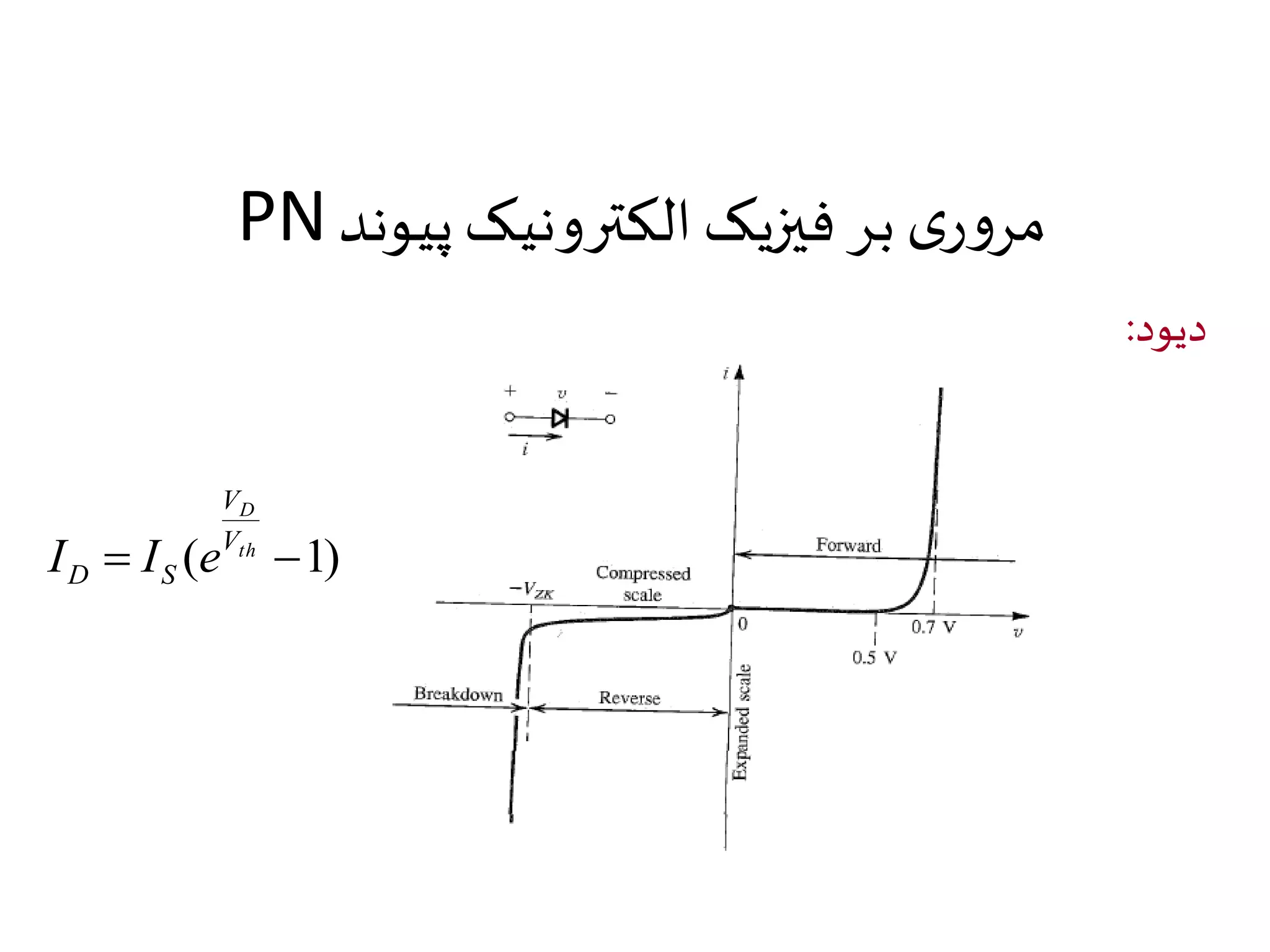
دیود:
V
D
V
D S I I e
( th 1)
2.
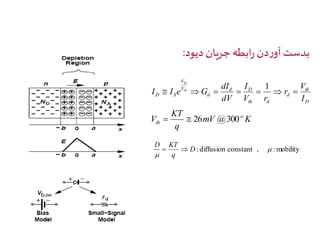
بدست آوردن رابطهجریان دیود:
V
th
D
r
d
I
d D
1
th d
d
V
D
V
dI
D S dV
V r
I
I I e th G
V o
mV K
KT
th 26 @300
q
: diffusion constant , :mobility
D KT
D
q
3.
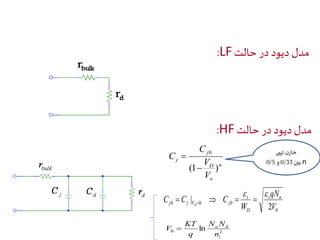
:LF مدل دیوددر حالت
:HF مدل دیود در حالت
n
C
0
V
D
o
j
j
V
C
(1
)
qN
C C C s a
0
|
s
0 0 0 2
V
W
D
j j VD j
خازن تهی
0/ 0 و 5 / بین 33 n
N N
a d
n
KT
0 2 ln
i
q
V
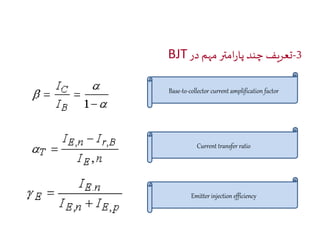
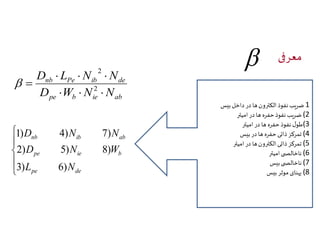
معرفی
2
D L N
N
nb Pe ib de
D W N N
2
pe b ie ab
1) 4) 7)
D N N
nb ib ab
D N W
2) 5) 8)
pe ie b
L N
3) 6)
pe de
1 ضریب نفوذ الکترون ها در داخل بیس
2) ضریب نفوذ حفره ها در امیتر
3)طول نفوذ حفره ها در امیتر
4) تمرکز ذاتی حفره ها در بیس
5) تمرکز ذاتی الکترون ها در امیتر
6) ناخالص ی امیتر
7) ناخالص ی بیس
8) پهنای موثر بیس
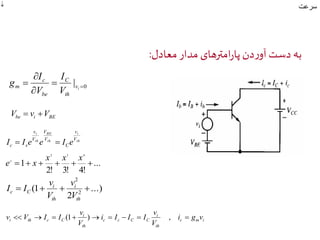
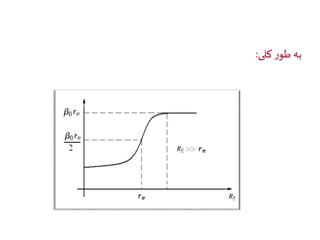
15.
سرعت
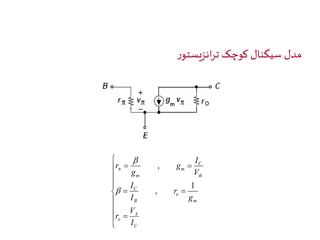
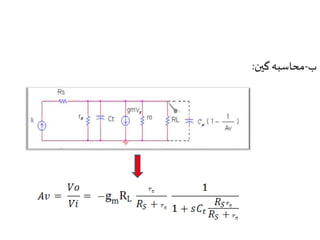
بهدست آوردن پارامترهای مدار معادل:
C
0 |
I
m
V
vi
th
c
be
I
V
g
be i BE V v V
i
v
th
BE
th
i
v
th
V
C
V
V
V
c s I I e e I e
...
x x x
2! 3! 4!
e x
1
x 2 3 4
...)
v
i
1 ( 2
c C 2
V
2
th
i
th
v
V
I I
v
v
v V I I (1 ) ,
i th c C i g v
c m i
i
th
c c C C
i
th
V
i I I I
V
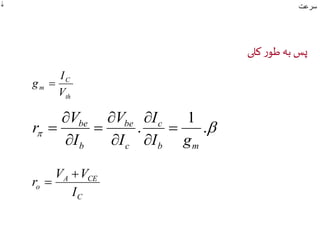
16.
سرعت
پسبه طور کلی
C
th
I
g
m V
1
c
V
be
V
be
I
r
.
.
b m
c
b
I g
I
I
V
V
A CE
C
r
o I
17.
سرعت
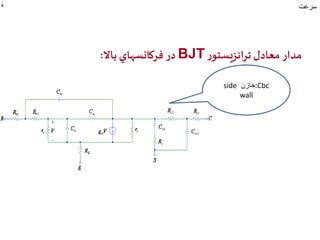
درفركانسهاي بالا: BJT مدار معادل ترانزيستور
side خازن :Cbc
wall
18.
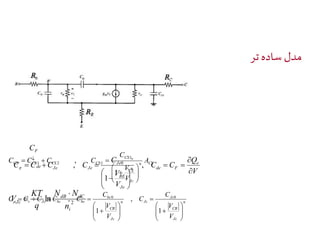
مدل ساده تر
Q
V
C C
, C
10
Je
, 0
V
V
BE
V
C
F
C C C C
e
n de F
Je
de Je Je
CS
,
1
n
Jc
C
N N
dB dC
, 0 0
V
CB
Jc
n Jc
C
bc
V
CB
Jc
KT
r Jc bc bc
V
C
V
C C C C C
1
,
1
2 ln
i
Jc
n
q
V
n CS
Jc
CS
CS CS CS CS A
V
C
C C C C
1
1 2 1
19.
داریم
ً
معمولا:
CS de bc C C C 1
C C1 C2 R R R
b b1 b2 R R R
l
A
R RC E ,
c
I
CE
o
A
V
C
o
Q
b
Jc
A
V
r
I
r
C
V
1
, 0
m g
r
20.
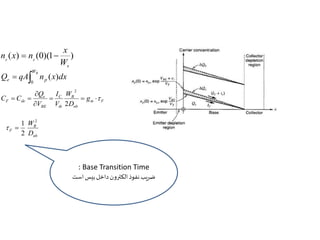
x
( )(0)(1 )
p p W
B
n x n
WB
e p Q qA n x dx
0
( )
C C
m F
W
B
I
Q
F de g
nb
C
th
e
BE
D
V
V
2
2
W2
B
1
F D
nb
2
: Base Transition Time
ضریب نفوذ الکترون داخل بیس است
21.
x
( )(0)(1 )
p p W
B
n x n
WB
e p Q qA n x dx
0
( )
C C
m F
W
B
I
Q
F de g
nb
C
th
e
BE
D
V
V
2
2
W2
B
1
F D
nb
2
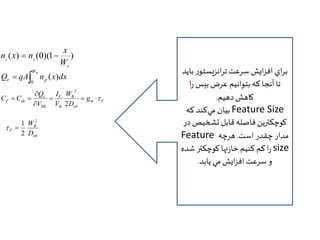
براي افزايش سرعت ترانزيستور بايد
تا آنجا كه بتوانيم عرض بيس را
كاهش دهيم.
بيان م يكند كه Feature Size
كوچكترين فاصله قابل تشخيص در
Feature مدار چقدر است. هرچه
را كم كنيم خازنها کوچکتر شده size
و سرعت افزايش مي يابد.
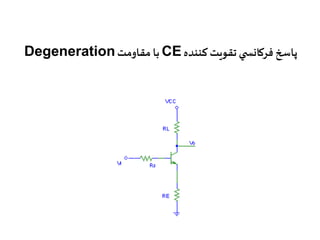
سرعت
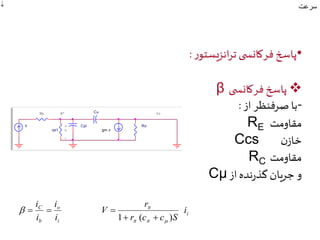
•پاسخفرکانس ی ترانزیستور :
β پاسخ فرکانس ی
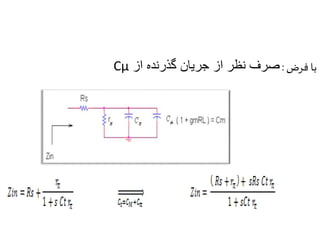
-با صرفنظر از :
RE مقاومت
Ccs خازن
RC مقاومت
Cμ و جریان گذرنده از
Cu
gm.v
v
-
B'
Ii
Rb Io
Ro
rpi1
+ Cpi
r
i
i
C i
i
o
i
b
r c c S
V
i
i
1 (
)
25.
سرعت
پس:
s
C C
g
s
g r
C C
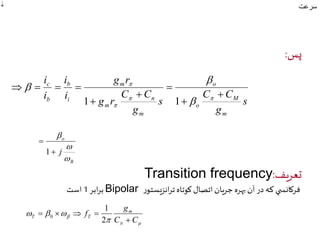
Transition frequency: تعریف
g
g r
i
b
i
o
j
برابر 1 است Bipolar فركانس ي كه در آن بهره جريان اتصال كوتاه ترانزيستور
i
i
m
M
o
o
m
n
m
m
i
c
b
1 1
B
1
g
1
f m
T T
C C
2
0
26.
سرعت
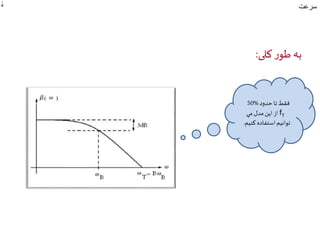
بهطور کلی:
فقط تا حدود % 50
از این مدل مي fT
توانيم استفاده كنيم.
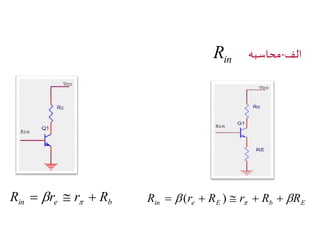
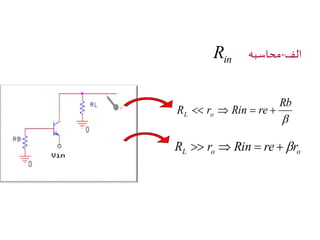
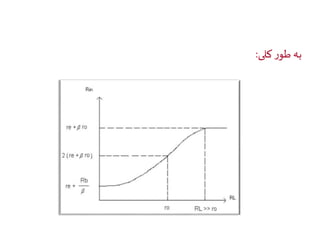
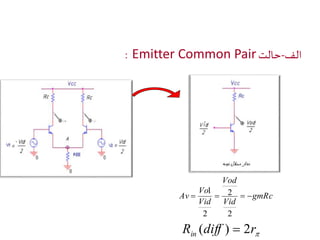
محاسبه - الفinR
in e b R r r R in e E b E R r R r R R ( )
29.
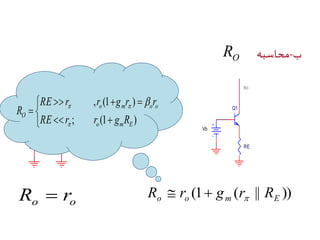
محاسبه - بOR
RE r r g r
r
O RE Q1
r r g R
Ro
Vb
o o R r
Ro
Q1
RE
Vb
o m o o
(1 ( || )) o o m E R r g r R
, (1 )
; (1 )
o m E
R
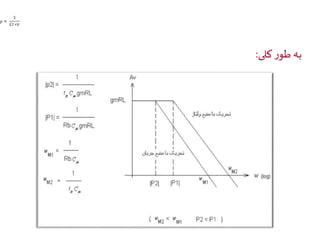
پاسخ فرکانس ی
مواردی که باید بدانیم:
-1 فرکانس قطع بالا )مفهوم پهنای باند (
-2 بهره در محدوده فرکانس ی میانی
-3 امپدانس ورودی و خروجی تقویت کننده
-4 حاشیه فاز
46.
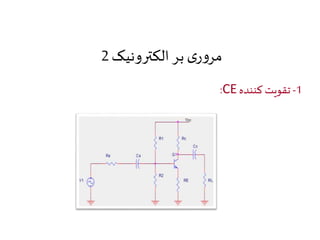
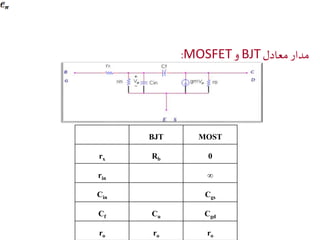
:MOSFET و BJTمدار معادل
BJT MOST
R 0 b rx
r ∞ in
Cgs Cin
Cgd Cu Cf
ro ro ro
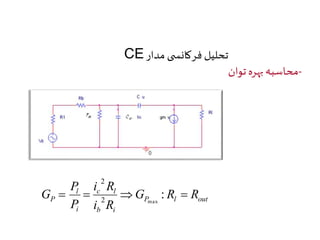
CC تحلیل فرکانسی مدار
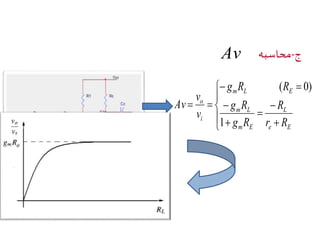
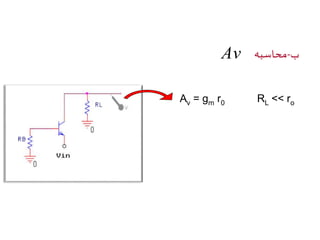
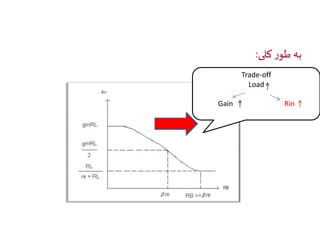
-محاسبه بهره
v R i z i R i
g v
i b i i E i m
v R i
g v
r
v
o
R
R R
sr c
z
s
z
1
s
P
r
g R
r
g R
v
E B
m E
E
m E
i
o E i m
1
1
*
1
1
( )
( )
1
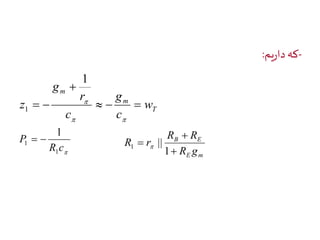
57.
-که داریم:
T
m
m
w
g
c
c
1
r
g
z
1
R c
P
1
1
1
R R
B E
R g
E m
R r
1
|| 1
58.
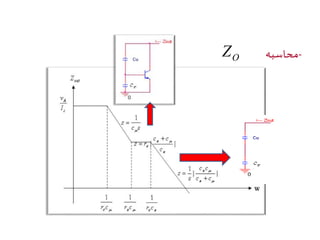
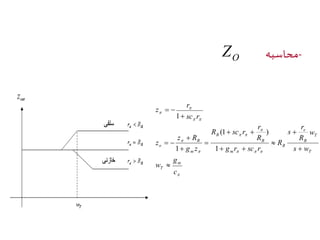
محاسبه - OZ
1
g
r
z R
r
R sc r
R
c
w
r
e
s w
w
R
s
R
g r sc r
g z
z
sc r
z
m
T
T
T
B
B
m
B
B
m
B
o
1
(1 )
1
59.
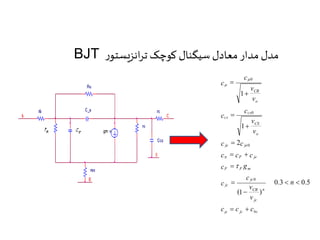
BJT مدل مدارمعادل سیگنال کوچک ترانزیستور
CB
CS
o
2
1
1
c c
0
v
0
v
0
c c c
0
CB
je je
cs
c
g
F F m
v
jc bc
n
jc
jc
jc
F je
cs
o
c c c
n
v
c
c
v
c
c
v
c
c
0.3 0.5
(1 )
60.
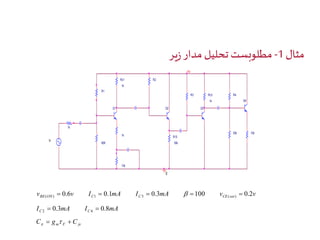
مثال 1- مطلوبستتحلیل مدار زیر
Q2 Q3
0
10k
Rc1
1k
60K
R2
R3
1k
13k
Q1
10v
Vi
R1
Rc3
1k
1k R15
50k
Q4
R4
53k
v 0.6 v I 0.1 mA I 0.3 mA 100 v
0.2
v
BE ON C C CE sat
( ) 1 3 ( )
I mA I
mA
C C
C g
C
m F je
0.3 0.8
2 4
61.
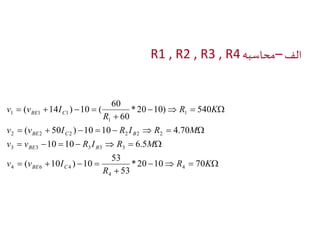
R1 , R2, R3 , R الف –محاسبه 4
BE C
60
v v I R I R M
( 50 ) 10 10 4.70
BE C B
2 2 2 2 2 2
v v R I R M
10 10 6.5
3 3 3 3 3
53
BE B
R K
R
v v I
R K
R
v v I
BE C
* 20 10 70
53
( 10 ) 10
* 20 10) 540
60
( 14 ) 10 (
4
4
4 6 4
1
1
1 1 1
62.
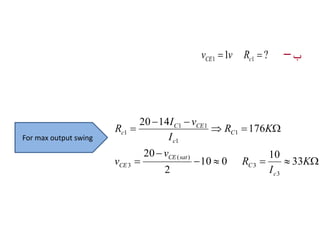
vCE1 1v Rc1 ? – ب
I v
C CE
1 1
K
I
R
v
v
R K
I
R
c
C
CE sat
CE
C
c
c
33
10
10 0
2
20
176
20 14
3
3
( )
3
1
1
1
For max output swing
63.
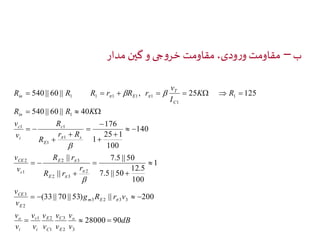
ب – مقاومتورودی، مقاومت خروجی و گین مدار
540 || 60 || , 25 125
25 1
7.5 || 50
12.5
1 1
2 3
(33 || 70 || 53) || 200
dB
R R K
R r
v
v
v
v
v
1 E
2
v
v
c
v
v
v
v
in
c
CE
CE
v
o
v
g R r v
v
r
R r
v
r R
R
R
v
K R
v
I
R R R r R r
o
C
E
C
i
i
m E
E
E
E
c
s
E
c
i
T
C
in E
28000 90
1
100
7.5 || 50
||
||
140
100
1
176
540 || 60 || 40
3
2 3
1
3 2 3 3
2
3
2
2
2 3
1
1
1
1
1
1
1 1 1 1 1
64.
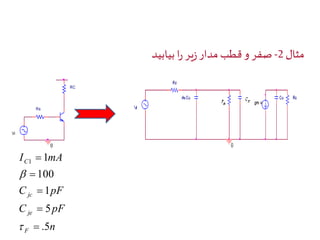
مثال 2-صفر وقطب مدار زیر را بیابید
0
RC
Vi
Rs
I mA
C
1 1
100
C pF
jc
1
C 5
pF
n
je
F
.5
65.
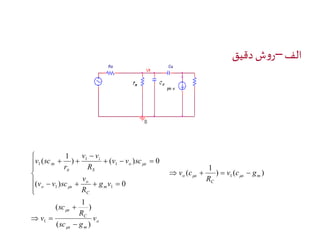
الف –روش دقیق
v
v
) ( ) 0
o
o
v
1
R
C
1
s
s m
s m
C
o s
m
C
(
o s
o s
S
i
s
v
sc
sc g
v
v c g
R
v c
g v
R
v v sc
v v sc
R
r
v sc
)
(
( )
) ( )
1
(
( ) 0
1
1
1 1
1
1
1
66.
c
s
(1)
R c Rc Rc RRc g s
R
R
R c
R
r
RR c c s
g
1
R
C
s
)
c g
s m
g R r R
m S S
R
v
v
o
o
v
v
i
c c c g
R
c
r R
c
R
v
R
c c v
r R
c
c
c g
C m
s
C C
m
S
i
s s s m
C
s
s
s
S
i
S
s s o
s
s
s m
1 ( )
( || )
) ( )
1
)(
1 1
(
1
)
1 1
(
( )
2
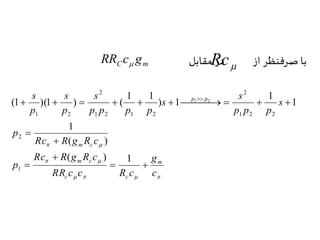
67.
Rc Cm RR c g
با صرفنظر از در مقابل
s
s
2
2
1
( )
m c
s
Rc R g R c
m c
g
c
RR c c R c
p
Rc R g R c
p
s
s
p p p
s
p p p p
p
p
m
c c
p p
( ) 1
1
1
) 1
1 1
(1 )(1 ) (
2
1
1 2 2
1 2 1 2
1 2
1 2
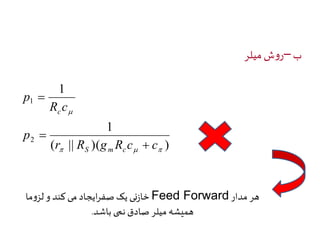
68.
ب –روش میلر
1
1
r R g R c c
( || )( )
1
2
p
R c
p
S m c
c
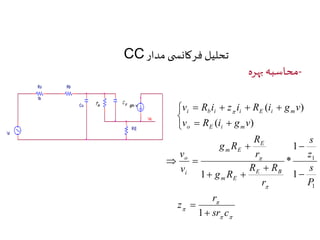
خازنی یک صفرایجاد می کند و لزوما Feed Forward هر مدار
همیشه میلر صادق نمی باشد.
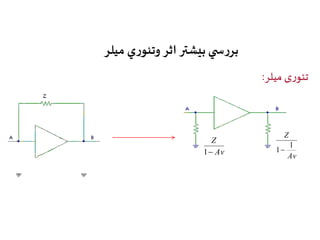
69.
بررس ي بيشتراثر وتئوري ميلر
تئوری میلر:
Z
Av
1
Z
1
Av
1
70.
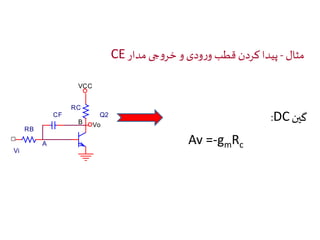
CE مثال -پیدا کردن قطب ورودی و خروجی مدار
VCC
RC
RB
Vi
CF
A
B
Q2
Vo
:DC گین
Av =-gmRc
71.
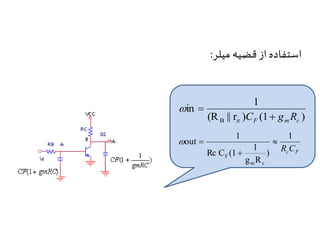
استفاده از قضیهمیلر:
1
c F R C
)
1
g R
1
Rc C (1
out
m c
F
F m c C g R
(R || r
1
in
B
72.
محدودیت های استفادهاز قضیه میلر:
1) در مواردي كه بهره بین دو نقطه بالا نيست،قابل استفاده نمي باشد.
2( اطلاعي از محل صفر به دست نمي دهد.
3( تقريب خوبي از قطب دوم )غیر مسلط( به دست نمي دهد .
73.
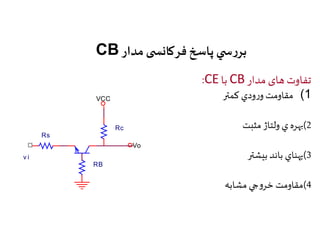
CB بررس يپاسخ فرکانس ی مدار
:CE با CB تفاوت های مدار
1) مقاومت ورودي كمتر
2(بهره ي ولتاژ مثبت
3(پهناي باند بيشتر
4(مقاومت خروجي مشابه
Rs
v i
RB
Rc
Vo
VCC
74.
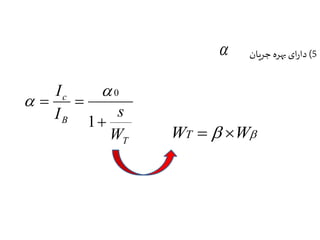
5( دارایبهره جریان
I s
T
c
B
W
I
1
0
WT W
75.
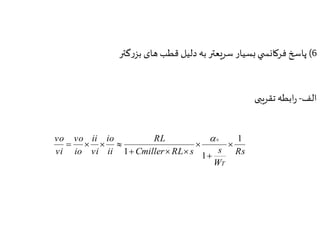
6( پاسخ فركانسي بسيار سريعتر به دلیل قطب های بزرگتر
الف- رابطه تقریبی
Rs
Cmiller RL s s
W
RL
io
ii
ii
vi
vo
io
vo
vi
T
1
1
1
0
76.
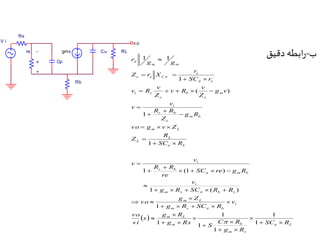
ب-رابطه دقیق
-Cu RL
Cp
Rs
re
v
Rb
+
V i
gmv
vo
g g
v
R R
r
vo g v
Z
1 (1 )
1 ( )
u L
r
v
v
SC re g R
i
m m
s b
L
v
R
R R
re
m s b s
g
Z
m L
C R
g R
m b
m s
m L
i
m s b
m b
s b
i
u L
L
m L
m b
e
i
m
e
b
e
i s
e
e
e e C
SC R
g R
S
g Rs
s
vo
vi
v
g R SC R
vo
g R SC R R
v
SC R
Z
g R
Z
v
v
g v
Z
v R
Z
v R
SC r
Z r X
1
1
1
1
1
1
1
1
1
( )
1
1 1
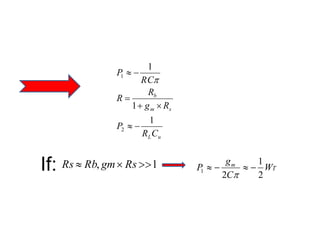
77.
R
b
m s
R C
L u
1
P
g R
R
RC
P
1
1
1
2
g
1
Rs Rb, gm Rs 1 P m
WT
C
2
2 1
If:
78.
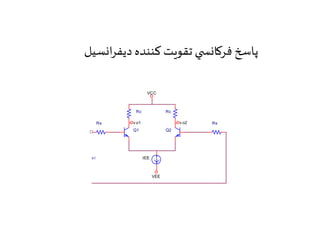
پاسخ فركانس يتقويت كننده ديفرانسيل
VCC
Rc Rc
Rs
v i
Rs
v o1 v o2
Q1 Q2
IEE
VEE
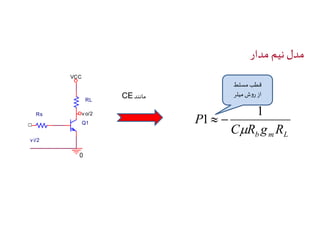
79.
مدل نیم مدار
RL
Rs
v i/2
Q1
VCC
v o/2
0
b m L C R g R
P
1
1
CE مانند
قطب مسلط
از روش میلر
80.
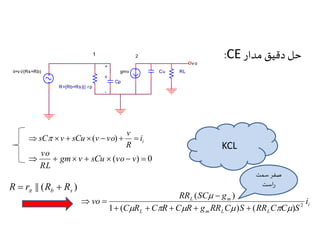
:CE حل دقیقمدار
Cp
Cu
-
gmv
vo
R=(Rb+Rs)|| r
+
RL
v
1
p
2
ii=v i/(Rs+Rb)
i i
v
sC v sCu (v vo)
R
vo
gm v sCu (vo v) 0
RL
|| ( ) b s R r R R
RR SC g
(
)
L m i
i
vo 1 ( C R C R C R g RR C ) S
( RR C C
)
S
2 L m L L
KCL
صفر سمت
راست
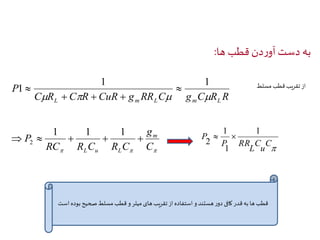
81.
به دست آوردنقطب ها:
1 1
1
C R C R CuR g RR C g C R R
P
L m L m L
C
u
1
P RR
C
L
P
1
1
2
g
1 1 1
P m
RC R C R C
C
L u L
2
از تقریب قطب مسلط
قطب ها به قدر کافی دور هستند و استفاده از تقریب های میلر و قطب مسلط صحیح بوده است
82.
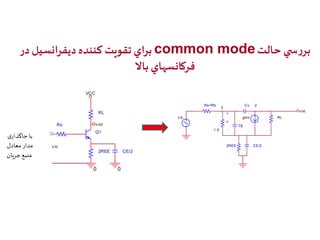
براي تقويت كنندهديفرانسيل در common mode بررس ي حالت
فركانسهاي بالا
RL
Rs
v ic
Q1
VCC
v oc
0
2REE CE/2
0
gmv
Cp
v oc
+
RL
v
1
p
2
v ic
Rs+Rb Cu
r
-
2REE
CE/2
با جاگذاری
مدار معادل
منبع جریان
83.
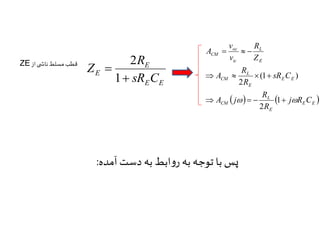
R
E
ZE2 قطب مسلط ناش ی از
E sR C
E E
Z
1
L
L
oc
(1 )
R
R
R
v
L
E E
E
CM
E E
E
CM
E
ic
CM
j R C
R
A j
sR C
R
A
Z
v
A
1
2
2
پس با توجه به روابط به دست آمده:
85.
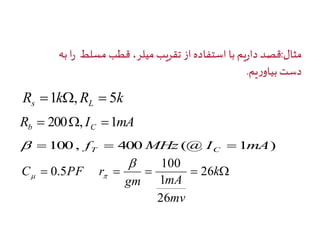
مثال:قصد داريم بااستفاده از تقريب ميلر، قطب مسلط را به
دست بياوريم.
R k R k s L 1 , 5
R I mA b C 200, 1
100, f 400MHz (@I 1mA) T C
100
C PF r 26
k
gm mA
mv
1
26
0.5
86.
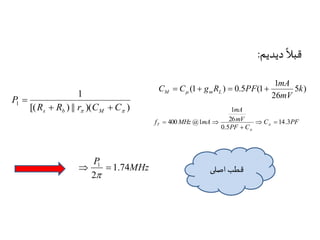
دیدیم
ً
قبلا:
mA
(1 ) 0.5 (1 k
mA
mV
26
f MHz mA 14.3
T
قطب اصلی
1
[( ) || )( )
1
R R r C C
P
s b M
5 )
1
mV
26
C C g R PF M m L
C PF
PF C
0.5
1
400 @1
MHz
P
1.74
1
2
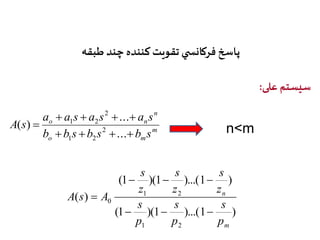
پاسخ فركانس يتقويت كننده چند طبقه
سیستم علی:
a a s a s a s
m
...
o m
n
o n
b b s b s b s
A s
...
( ) 2
1 2
2
1 2
n<m
s
s
s
(1 )(1 )...(1
)
1 2
n
s
s
s
(1 )(1 )...(1 )
( )
1 2
0
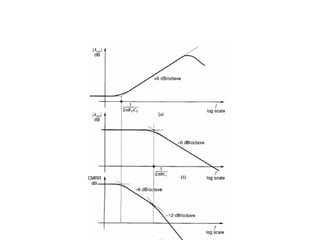
m
p
p
p
z
z
z
A s A
93.
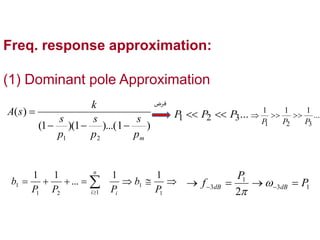
Freq. response approximation:
(1) Dominant pole Approximation
... P1 P2 P3 ...
s
k
s
s
(1 )(1 )...(1 )
( )
p
p
1 2 m p
A s
1 1 1
P1 P2 P3
1
1 2 1
1
1
1 1
...
1 1
P
b
P P P
b
i
n
i
3 1
1
3 2
P
P
f dB dB
فرض
حالتهاي ممكن درتقريب قطب مسلط:
دور نباشند و تقريب قطب مسلط برقرار نباشد. f3 , f2 , f 1) فرض كنيم 1
f )2 3 , f2 , f1 و... بهم نزديك باشند.
3( )طبقه اول (
...
1 1
1.1
1
2
2
2
f f f dB
3 1
...
1 1 1
2
2
2
f f f dB
3 1
1
n
dB dB f f f f f
1 2 3 3 3
[ ] 2 1
96.
نقاط ضعف اينروش:
1(فقط در حالت قطب مسلط درست است.
2(از اثر متقابل خازن ها چشم پوش ي شده است.
3(از اثر صفر تابع تبديل چشم پوش ي شده است و اطلاعاتي در مورد صفرها
و قطب هاي ديگر مدار بدست نمي دهد.
97.
شهود:
N s
( )
( )
( )
D s
A s
D(s) (1 s1)(1 s 2)(1 s 3)
2
s s s b s b s b s 1 2 3 1 2
3
2
1 2 2 3 1 3
2
1 2 3 1 ( ) ( ) ( ) 1
P b T 1 1 2 3 First time – moment Due to poles
98.
( ) () 2 2 2 2
2
2
1 2 3 P1 P2 P3 P P P
b
2
2
2
2
2
IP P T T
b
ثابت زماني دوم متعلق به قطبهاي مدار
99.
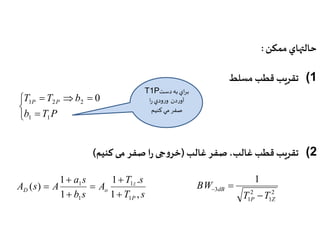
حالتهاي ممكن :
1) تقريب قطب مسلط
T T b P P
0
1 2 2 2) تقريب قطب غالب، صفر غالب )خروجی را صفر می کنیم(
b
T P
1 1
T1P براي به دست
آوردن ورودي را
صفر مي كنيم
T s
1 .
z
1
1
1
D o 1 ,
T s
A
a s
b s
A s A
P
1
( )
1
1
2
1
2
1
3
1
P Z
dB
T T
BW
100.
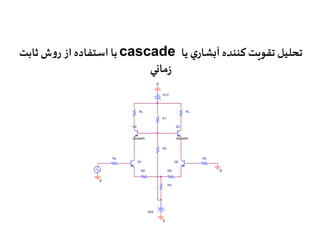
با استفاده ازروش ثابت cascade تحليل تقويت كننده آبشاري يا
زماني
VCC
R1
R2
Q3
RL
QbreakN
Q4
QbreakN
Rs Rs
Q2
0
RE
R3
Q1
RE
0
VEE
0
0
RL
101.
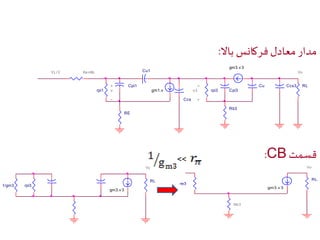
مدار معادل فرکانسبالا:
:CB قسمت
RE
+
+
- Ccs
Cpi3
Vi/2 Cu1
Cu
rpi1
Vo
Cpi1 Ccs3
gm1.v
Rs+Rb
Rb3
-
rpi3
gm3.v 3
v
RL
v3
rpi3
RL
gm3.v 3
1/gm3
Vo
Rb3
RL
gm3.v 3
re3
Vo
<<
102.
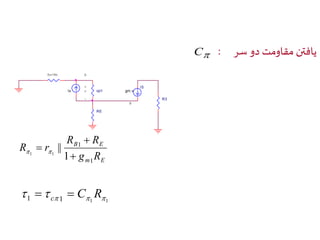
C : یافتنمقاومت دو سر
RE
R3
Rs+Rb
+ I5
gm.v
A
B
rpi1
Ix v
-
R R
B E
g R
m E
R r
1
1
1
||
1 1
1 1 1 1 C R c
103.
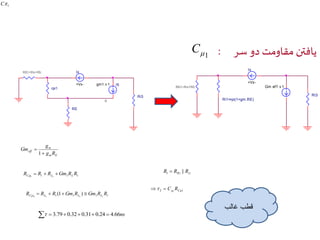
C یافتن مقاومتدو سر : 1
RE
Ri3
RB1=Rs+Rb
gm1.v 1 I5
B
rpi1
Ix
+Vx-
Ri3
Ix
+Vx-
RB1=Rs+Rb Gm ef f .v 1
Ri1=rpi(1+gm.RE)
m
eff g R
m E
g
Gm
1
R R R Gm R R C L L
1 1 1 1 1
1 1 1 || B i R R R
R R R (1 Gm R ) Gm R R C L L L
1 1 1 1 1 1 1 1
2 1 1 C C R
3.79 0.32 0.31 0.24 4.66ns
قطب غالب
1C
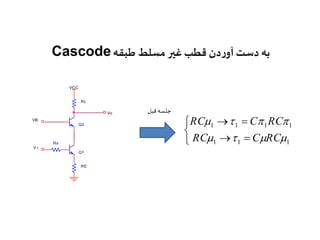
104.
Cascode به دستآوردن قطب غیر مسلط طبقه
Q1
V i
Rs
RE
VB
Q3
VCC
Vo
RL
RC C RC
1 1 1 1
RC
C RC
1 1 1
جلسه قبل
105.
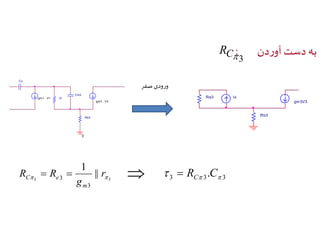
به دست آوردن:
3 RC
gm1 . V1
gm3 . V3
r3
Rb3
0
Cu
Cin3
ورودی صفر
gm3V3
Rb3
Re3 Ix
||
r
R . C C e 3 3 C 3 3 1
3 3
3
g
R R
m
106.
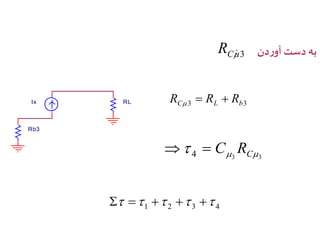
3 : بهدست آوردن CR
Ix RL C 3 L b3 R R R
Rb3
4 3 3 C C R
1 2 3 4
107.
VCC,VEE10 RS 1k: مثال
R R k R k E L 75 4 1 3 4 10 200 1 2 R k R k
( ) 0.67 0.025 200 3 VBE on ns Rb F rc(actrve region) 150
=1.3pF
C PF V V CB 0.6 0.6 0 0( )
KT n
2
NaNd
q
1
0 ln
108.
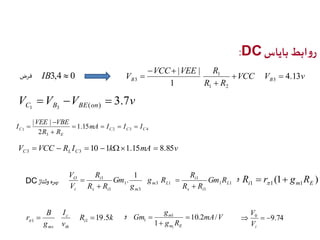
:DC روابط بایاس
VCC VEE R
1
فرض IB3,4 0 VCC V v
V
4.13
B 3 B R R
1
| |
3
1 2
V V V
3.7 v C 1 B 3 BE ( on )
VEE
VBE
I
C mA I I I
2 3 4
| |
1 1.15
3
2
C C C
E
R
R
V VCC R I k mA v C L C 10 1 1.15 8.85 3 3
R
R
V
DC O Gm R
Ri r1(1 gm1RE )
1 1
1 بهره ولتاژ 1
i
1
3 1
3
1 1
1
1
. L
s i
m L
i
s i m
i
R R
g R
g
Gm
R R
V
c
g
m 1
10.2 /
V
9.74 0
19.5 1 1 mA V
r i
R k
I
v
B
g
th
ms
1
g R
Gm
m E
1
1
i V
و
و
109.
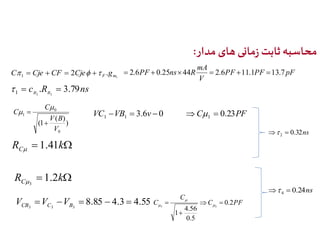
محاسبه ثابت زمانیهای مدار:
mA
2.6PF 0.25ns44R 2.6 11.1 13.7
2 . 1 F m C Cje CF Cje g PF PF pF
c .R 3.79ns
1 1 1
1
V
3.6 0 1 1 VC VB v
)
V B
( )
1 (
0
0
1
V
C
C
C 0.23PF 1
R k C 1.41
0.32ns 2
R k C 1.2
3
V V V 8.85 4.3 4.55
C PF
CB C B 3 3 3
C
C 0.2
3 3
4.56
0.5
1
0.24ns 4
110.
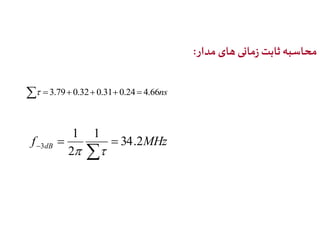
محاسبه ثابت زمانیهای مدار:
3.790.320.310.24 4.66ns
1
1
f
34.2
MHz 3 dB 2
111.
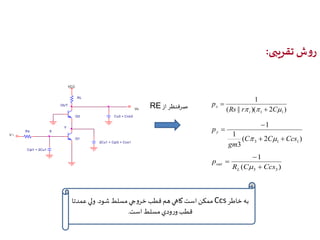
روش تقریبی:
Q1
Cpi1 + 2Cu1
X
V i
Cu3 + Ccs3
OUT
Rs
Q3
VCC
Vo
RL
2Cu1 + Cpi3 + Ccs1
Y
1
RE x
)( || 2 )
) صرفنظر از 1 1 Rs r C
p
i
( 2 )
3
1
1
3 1 1 C C Ccs
gm
py
1
out
3 3 R C Ccs
( )
p
L
ممکن است گاهي هم قطب خروجي مسلط شود. ولي عمدتا Ccs به خاطر
قطب ورودي مسلط است.
112.
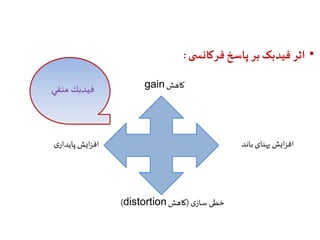
• اثر فیدبکبر پاسخ فرکانس ی :
gain کاهش
افزایش پهنای باند
)distortion خطی سازی )کاهش
فيدبك منفي
افزایش پایداری
113.
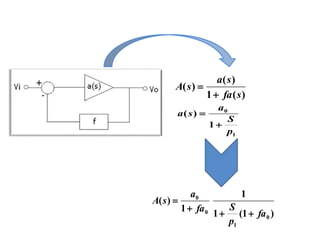
a s
()
1 ( )
( )
fa s
A s
S
1
0
1
( )
p
a
a s
1
fa S
1 (1 )
1
( )
0
1
0
0
fa
p
a
A s
114.
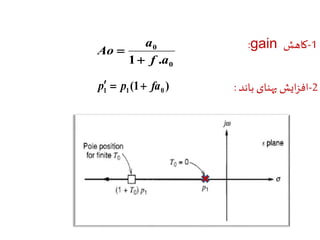
:gain -1 کاهش
0
0
a
1 f .a
Ao
p1 p1(1 fa -2 افزایش پهنای باند : ( 0
115.
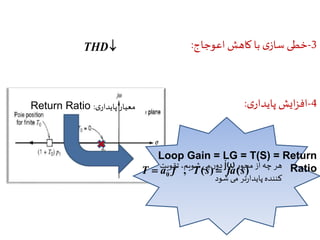
اعوجاج سازی باکاهش خطی -3 : THD
-4 افزایش پایداری :
دور می شویم، تقویت jω هر چه از محور
کننده پایدارتر می شود
Return Ratio : معیار پایداری
Loop Gain = LG = T(S) = Return
, ( ) ( ) Ratio 0 T a f T s fa s
116.
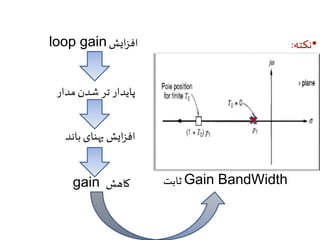
loop gain •نکته:افزایش
پایدار تر شدن مدار
افزایش پهنای باند
gain ثابت کاهش Gain BandWidth
117.
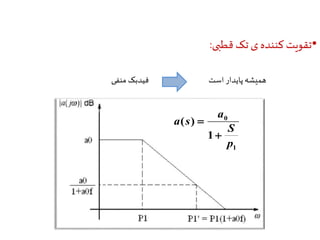
•تقویت کننده یتک قطبی:
همیشه پایدار است فیدبک منفی
S
1
0
1
( )
p
a
a s
118.
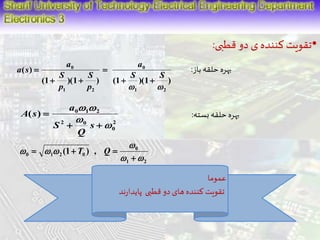
•تقویت کننده یدو قطبی:
0
0
: بهره حلقه باز
a
S S
S
S
(1 )(1 ) (1 )(1 )
( )
1 2
1 2
p
p
a
a s
بهره حلقه بسته:
2
0
0 1 2 ( )
2 0
s
Q
S
a
A s
0
1 2
0 1 2 0 (1 ) ,
T Q
عموما
تقویت کننده های دو قطبی پایدارند
119.
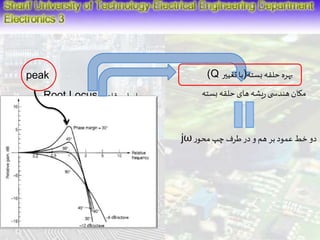
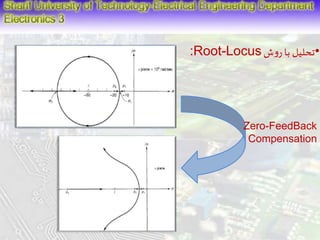
peak (Q بهرهحلقه بسته(با تغییر
Root Locus مکان هندس ی ریشه های حلقه بسته بر اساس قاعده
jω دو خط عمود بر هم و در طرف چپ محور
120.
•تقویت کننده یسه قطبی :
0
S
S
S
a
(1 )(1 )(1 )
( )
p
p
p
1 2 3
a s
]
a s
( )
1 ( )
T s f a s
( ) . ( )
( ) [ ( )
T s
T s A s
برای تقویت کننده با 3 قطب یا
بیشتر باید به طریقی مثلا
استفاده از فیدبک آنها را پایدار
کنیم. PM<0
121.
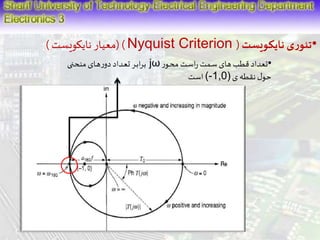
معیار نایکویست (( )Nyquist Criterion ( •تئوری نایک ویست
برابمر تعمداد دورهمای منح می jω •تعداد قطب های سممت راسمت محمور
حول نقطه ی ( 1,0 -) است
122.
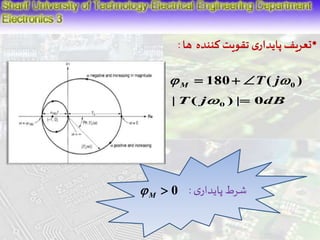
•تعریف پایداری تقویتکننده ها :
180 ( ) 0 T j M
|T( j ) | 0dB 0
0 M : شرط پایداری
123.
•مشاهده ی اثرفیدبک بر تقویت کننده :
a j
( )
1 ( )
a j
( )
1 ( )
( )
T j
fa j
A j
a j
( )
A j
. ( )
[ ( ) 1] ( )
f a j
small a j A j
)
a
0 A
1
1
(
1
1
a
( ) 0
0
0
0
a f
a f f
f
124.
20log ( )
( ) ( ). 1 0 0 T j a j f
1
x a j
20log | ( ) | 20log T j
f
f
a j
1
( ) 0 0
PM 180 T(i) M
( ) ( ) 1 0 T j a j f 0
تقویت کننده پایدار است. 0 M
125.
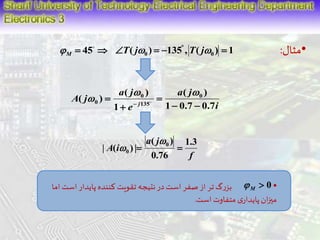
•مثال: 45
T( j) 135 , T( j) 1
M 0 0 i
a j
a j
0
e
A j
( )
0
j 1 0.7 0.7
1
( )
( ) 0
135
f
a j
| A ( i
) | 0
1.3
( )
0
0.76
0 M
• بزرگ تر از صفر است در نتیجه تقویت کننده پایدار استاما
میزان پایداری متفاوت است.
126.
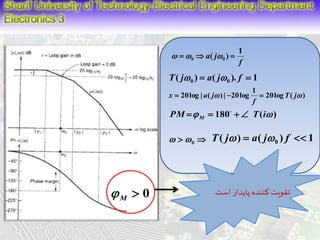
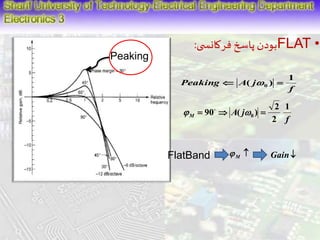
بودن پاسخ فرکانسی: FLAT •
f
Peaking A j
1
( ) 0
f
A j M
1
2
2
90 ( ) 0
FlatBand M Gain
Peaking
127.
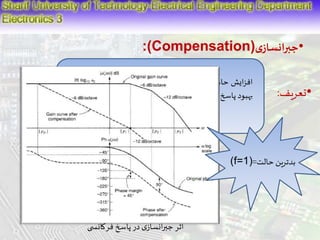
:(Compensation) •جبرانسازی
•تعریف:
افزايش حاشيه فاز براي پايدار كردن تقويت كننده )اصلاح يا
بهبود پاسخ فركانس ي تقويتكننده( را جبران سازي گويند.
اثر جبرانسازی در پاسخ فرکانس ی
(f= بدترین حالت=( 1
128.
•روش های جبرانسازی:
ایجاد قطب مسلط
روش میلر
Lead Compensation
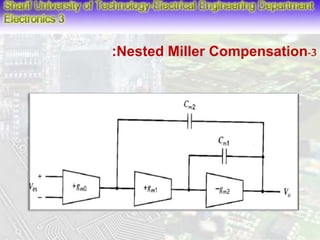
Nested Miller Compensation
129.
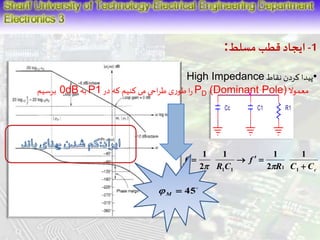
-1 ایجاد قطبمسلط:
High Impedance •پیدا کردن نقاط
0 برسیم dB به P را طوری طراحی می کنیم که در 1 PD (Dominant Pole) معمولا
Cc C1 R1
1
1 1
c R C C
f
R C
f
1 1 1 1
1
2
2
45 M
130.
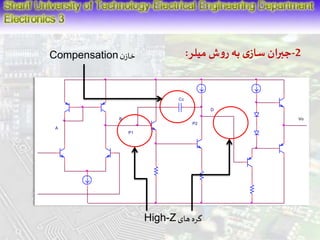
-2 جبران سازیبه روش میلر:
P2
A
Vo
D
P1
B
Cc
Compensation خازن
High-Z گره های
131.
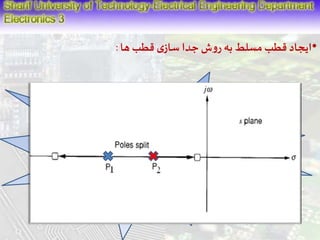
•ایجاد قطب مسلطبه روش جدا سازی قطب ها :
تئوری تکمیل شده روش میلر( (Pole – splitting
132.
:Pole-Splitting •محاسبات
S C C SC
c c i
0
S C C
( )
1
( )
1
v
: 1
2
2
2
1
1
s
v
c c o m
R
g SC
R
s C C i
m c
c s
v
KCL
S C C SC
c c
o
( )
1
( )
1
0
( )
1
2
2
2
1
1
2
1
1
m c c
s
S C C
R
g SC
R
g SC
R
i
( )
g SC R R
m c
2 1 2
1 [( ) ( ) ] ( )
c c m c 1 2 1 2 2 c 1
c
2
1 1 2 2 2 1 2
o
s
s C C R C C R g R R C S R R C C C C C C
v
i
133.
( )
g SC R R
m c
2 1 2
1 [( ) ( ) ] ( )
c c m c 1 2 1 2 2 c 1
c
2
1 1 2 2 2 1 2
o
s
s C C R C C R g R R C S R R C C C C C C
v
i
2
1
D S )
' '
2 ' '
1 1 2
1 1
( ) 1 ( S
P P
S
P P
مخرج
1 1
'
2
P P
1 2 '
1
'
P P
1
C Cc R C Cc R gm R R Cc gm R R Cc
P
1 1 2 2 2 1 2 2 1 2
1
1
( ) ( )
c
g C
m 2
c
2
C C C C C
P
( ) 1 2 1 2
134.
C C
P
2 1 2 0
c
[ ( ) ] C P
P
1
Cc
1
m c g R R C
P
R C
P
2 1 2
1
1 1
1
1
, '
c
g C
m 2
c
1
2
C C C C C
P
R C
P
( )
, '
1
1 2 1 2
2
2 2
2
2
1 2 1 2
C P
C C C C C
C
c
c c
P
1
P
2
Poles Splitting
P
2
P1
`
P2`
135.
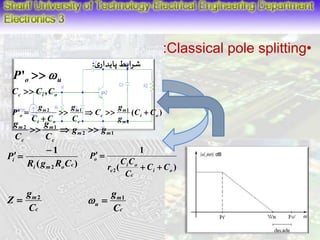
:Classical pole splitting•
شرایط پایداری :
o u P'
c i o C C ,C
g
g
2 m
1 m
1
m
g
P
' ( )
o C C
g
m m
g g
1
g
i R g R C
( )
i m2 o c
P
1
C C
i o
( )
2 i o
c
e
o
C C
C
r
P
m
C
c
g
Z 2
g
m
1 u C
c
2
i o
m
c
c
i o
g
C
C
C C
2 1
2 1
m m
c
c
C
C
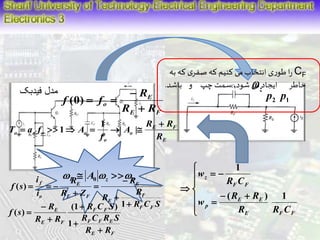
مدل فیدبک
1
R R
E E
E F F
p
F F
z
R R C
w
R C
w
( ) 1
E
R
o R R
E F
f f
(0)
E F
E
1
o o o o o
R
o
R R
A
f
T a f A
1
| |
Cرا طوری انتخاب می کنیم که صفری که به F
خاطر ایجاد می شود، سمت چپ و باشد . z
P z z A 0
R
F
R C S
R
R
R
E
R Z
i
i
f s
F F
E
E
E F
f
o
1
( )
(1 R C S
)
F F
R C R S
F F E
E F
E
R
E F
R R
R R
f s
1
( )
1p 2 p
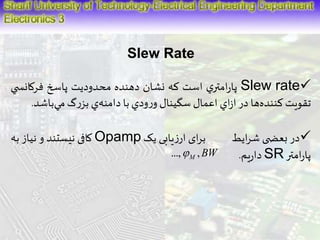
Slew Rate
پارامترياست كه نشان دهنده محدوديت پاسخ فركانس ي Slew rate
تقويتكنند هها در ازاي اعمال سگينال ورودي با دامن هي بزرگم يباشد.
کافی نیستند و نیاز به Opamp در بعض ی شرایط برای ارزیابی یک
...,M ,BW . داریم SR پارامتر
141.
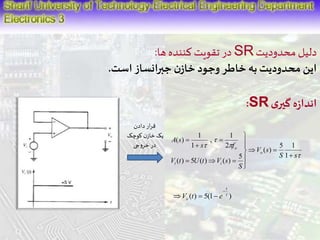
در تقویت کنندهها: SR دلیل محدودیت
این محدودیت به خاطر وجود خازن جبرانساز است.
:SR اندازه گیری
1
,
1
s 2
f
5 1
S s
V s
S
A s
1
( )
V t U t V s
o
i i
o
1
( )
5
( ) 5 ( ) ( )
قرار دادن
یک خازن کوچک
در خروجی
t
( ) 5(1 )
o V t e
142.
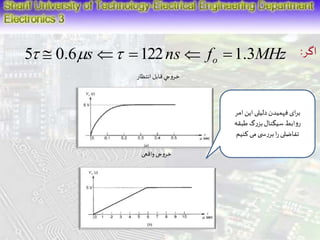
s ns fMHz : اگر o 5 0.6 122 1.3
خروجي قابل انتظار
خروجی واقعی
برای فهمیدن دلیلی این امر
روابط سیگنال بزرگ طبقه
تفاضلی را بررس ی می کنیم
143.
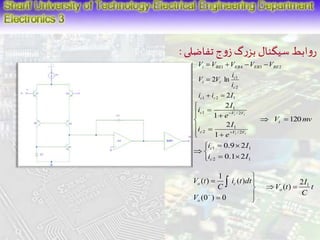
روابط سیگنال بزرگزوج تفاضلی :
V V V V
V
i BE EB EB BE
1 4 3 2
2 ln
i
i i I
c
1 2 1
1
2
2
i
V V
c c
c
i t
V mv
c
V V
e
I
i
e
I
i
i
i t
c V V
i t
120
1
2
1
2
/ 2
1
2
/ 2
1
1
t
I
i 0.9
2
I
c
1 1
i 0.1 2
I
o c 1 2
C
V t
V
i t dt
C
V t
o
o
( )
(0 ) 0
( )
1
( )
2 1
c
144.
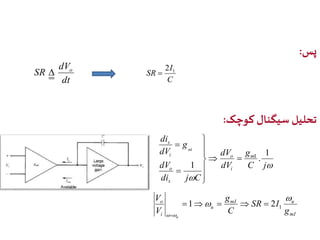
پس:
تحلیل سیگنالکوچک:
dV
SR o
dt
I
SR 1 2
C
g
C j
dV
o
dV
di
x
dV
i
dV
g
o
di j C
m
i
x
m 1
.
1
mI u
mI
u
V
o
i
g
SR I
g
C
V
u
1 1 2
145.
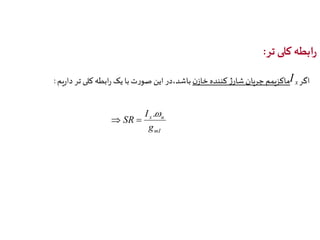
رابطه کلی تر:
باشد،در این صورت با یک رابطه کلی تر داریم ماكزيمم جريان شارژ كننده خازن اگر : x I
x u
g
mI
I
SR
.
146.
:SR روش هایافزایش
1(افزایش
2(افزایش
u
x I
mI g
3(کاهش .این کار به چند طریق امکان پذیر است :
در ورودی. MOS -استفاده از
در امیتر ترانزیستورهای ورودی Degeneration -استفاده از مقاومت
147.
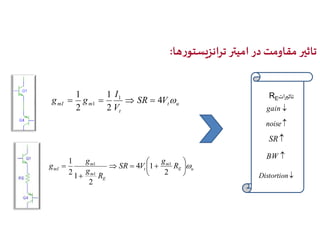
تاثیر مقاومت درامیتر ترانزیستورها:
1 1
1
g g 4
t u
I
SR
V
mI m 1 t
V
2
2
g
1
1
1
g
mI R
E u
m
t
E
m
m
g
SR V
R
g
2
4 1
2
1
2
1
RE تاثیرات
g ain
noise
SR
BW
Distortion
148.
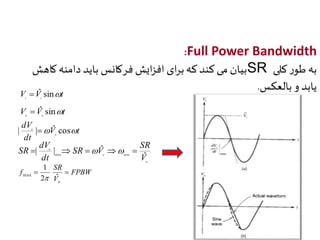
:Full Power Bandwidth
بیان می کند که برای افزایش فرکانس باید دامنه کاهش SR به طور کلی
یابد و بالعکس.
V V t i i ˆ sin
V V t o o ˆ sin
o | | ˆ cos
V t
dV
dt
o
SR
o
o
dV
o
V
SR V
dt
SR
ˆ
| | ˆ max max
FPBW
SR
2 ˆ
V
f
o
1
max
149.
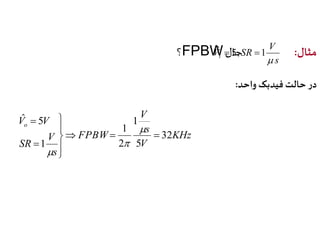
V
؟FPBW مثال:حال
ˆ 5, 1
V SR i
s
در حالت فیدبک واحد:
KHz
V
s
V
FPBW
ˆ 5
V V o
V
s
SR
32
1
5
1
2
1



![m
eff g R
m E
g
Gm
1
C (1Gmef f RL) M C
C
gmRE
C CM
T 1
[( )] || ( (1 . )] T s b m E R R R r g R
=](https://image.slidesharecdn.com/presentationbjt1-141015193221-conversion-gate02/85/Presentation-bjt1-88-320.jpg)
![حالتهاي ممكن در تقريب قطب مسلط:
دور نباشند و تقريب قطب مسلط برقرار نباشد. f3 , f2 , f 1) فرض كنيم 1
f )2 3 , f2 , f1 و... بهم نزديك باشند.
3( )طبقه اول (
...
1 1
1.1
1
2
2
2
f f f dB
3 1
...
1 1 1
2
2
2
f f f dB
3 1
1
n
dB dB f f f f f
1 2 3 3 3
[ ] 2 1](https://image.slidesharecdn.com/presentationbjt1-141015193221-conversion-gate02/85/Presentation-bjt1-95-320.jpg)
![•تقویت کننده ی سه قطبی :
0
S
S
S
a
(1 )(1 )(1 )
( )
p
p
p
1 2 3
a s
]
a s
( )
1 ( )
T s f a s
( ) . ( )
( ) [ ( )
T s
T s A s
برای تقویت کننده با 3 قطب یا
بیشتر باید به طریقی مثلا
استفاده از فیدبک آنها را پایدار
کنیم. PM<0](https://image.slidesharecdn.com/presentationbjt1-141015193221-conversion-gate02/85/Presentation-bjt1-120-320.jpg)
![•مشاهده ی اثر فیدبک بر تقویت کننده :
a j
( )
1 ( )
a j
( )
1 ( )
( )
T j
fa j
A j
a j
( )
A j
. ( )
[ ( ) 1] ( )
f a j
small a j A j
)
a
0 A
1
1
(
1
1
a
( ) 0
0
0
0
a f
a f f
f
](https://image.slidesharecdn.com/presentationbjt1-141015193221-conversion-gate02/85/Presentation-bjt1-123-320.jpg)

![:Pole-Splitting •محاسبات
S C C SC
c c i
0
S C C
( )
1
( )
1
v
: 1
2
2
2
1
1
s
v
c c o m
R
g SC
R
s C C i
m c
c s
v
KCL
S C C SC
c c
o
( )
1
( )
1
0
( )
1
2
2
2
1
1
2
1
1
m c c
s
S C C
R
g SC
R
g SC
R
i
( )
g SC R R
m c
2 1 2
1 [( ) ( ) ] ( )
c c m c 1 2 1 2 2 c 1
c
2
1 1 2 2 2 1 2
o
s
s C C R C C R g R R C S R R C C C C C C
v
i
](https://image.slidesharecdn.com/presentationbjt1-141015193221-conversion-gate02/85/Presentation-bjt1-132-320.jpg)
![
( )
g SC R R
m c
2 1 2
1 [( ) ( ) ] ( )
c c m c 1 2 1 2 2 c 1
c
2
1 1 2 2 2 1 2
o
s
s C C R C C R g R R C S R R C C C C C C
v
i
2
1
D S )
' '
2 ' '
1 1 2
1 1
( ) 1 ( S
P P
S
P P
مخرج
1 1
'
2
P P
1 2 '
1
'
P P
1
C Cc R C Cc R gm R R Cc gm R R Cc
P
1 1 2 2 2 1 2 2 1 2
1
1
( ) ( )
c
g C
m 2
c
2
C C C C C
P
( ) 1 2 1 2
](https://image.slidesharecdn.com/presentationbjt1-141015193221-conversion-gate02/85/Presentation-bjt1-133-320.jpg)
![C C
P
2 1 2 0
c
[ ( ) ] C P
P
1
Cc
1
m c g R R C
P
R C
P
2 1 2
1
1 1
1
1
, '
c
g C
m 2
c
1
2
C C C C C
P
R C
P
( )
, '
1
1 2 1 2
2
2 2
2
2
1 2 1 2
C P
C C C C C
C
c
c c
P
1
P
2
Poles Splitting
P
2
P1
`
P2`](https://image.slidesharecdn.com/presentationbjt1-141015193221-conversion-gate02/85/Presentation-bjt1-134-320.jpg)




























































![Omidaminzadeh gamification [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/omidaminzadeh-gamificationautosaved-141015193143-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)
