Download as PDF, PPTX



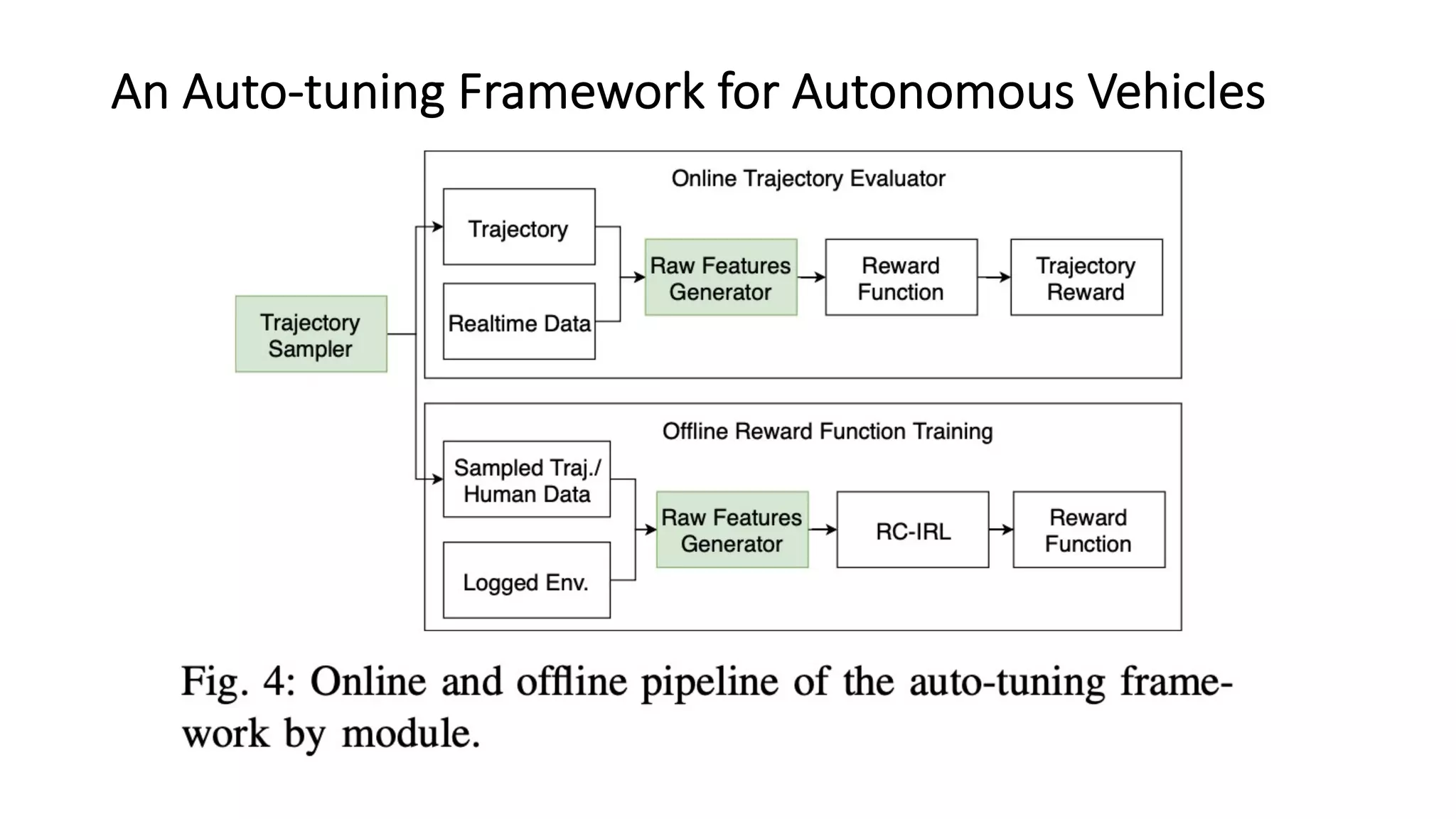

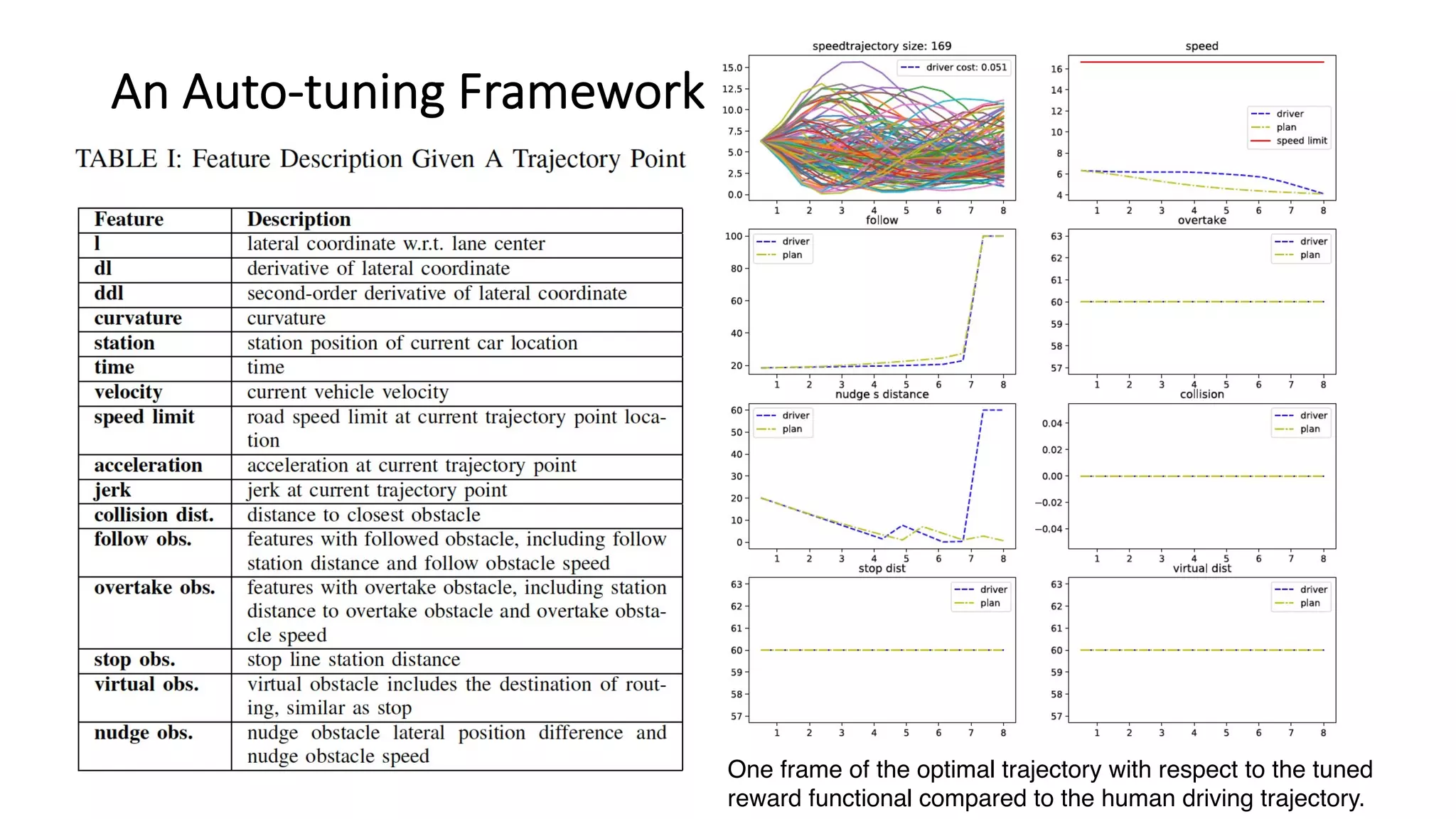

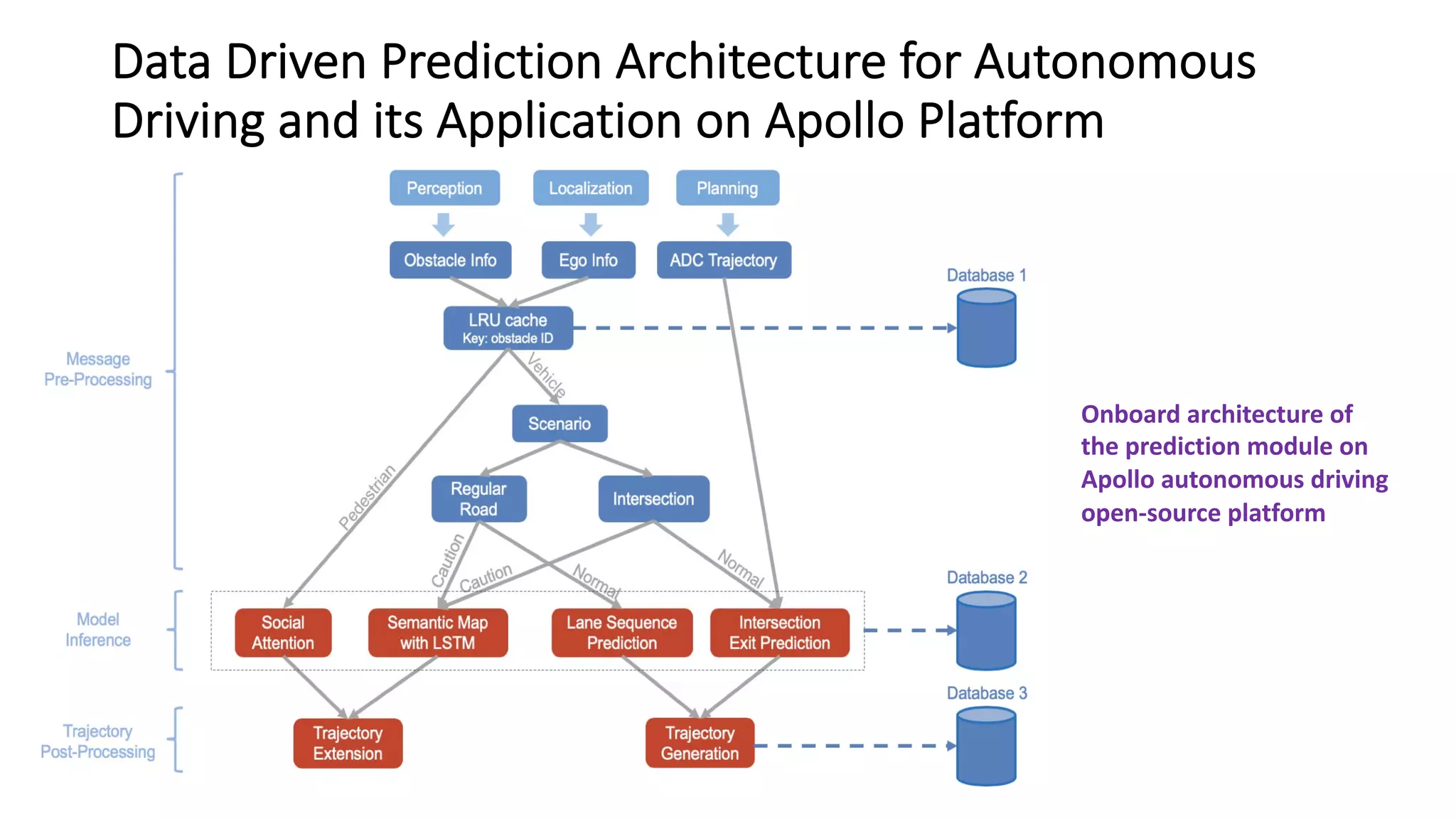

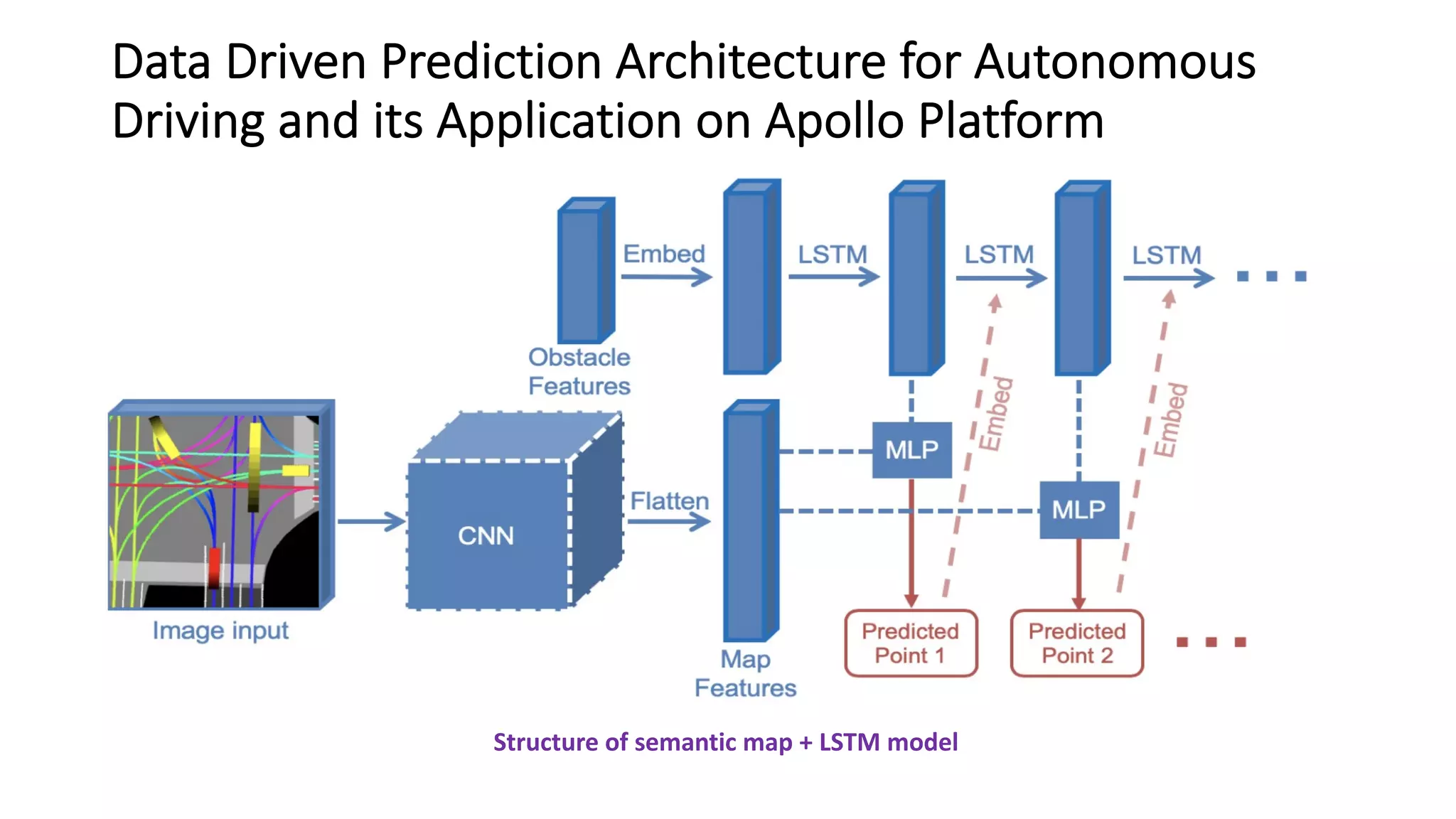

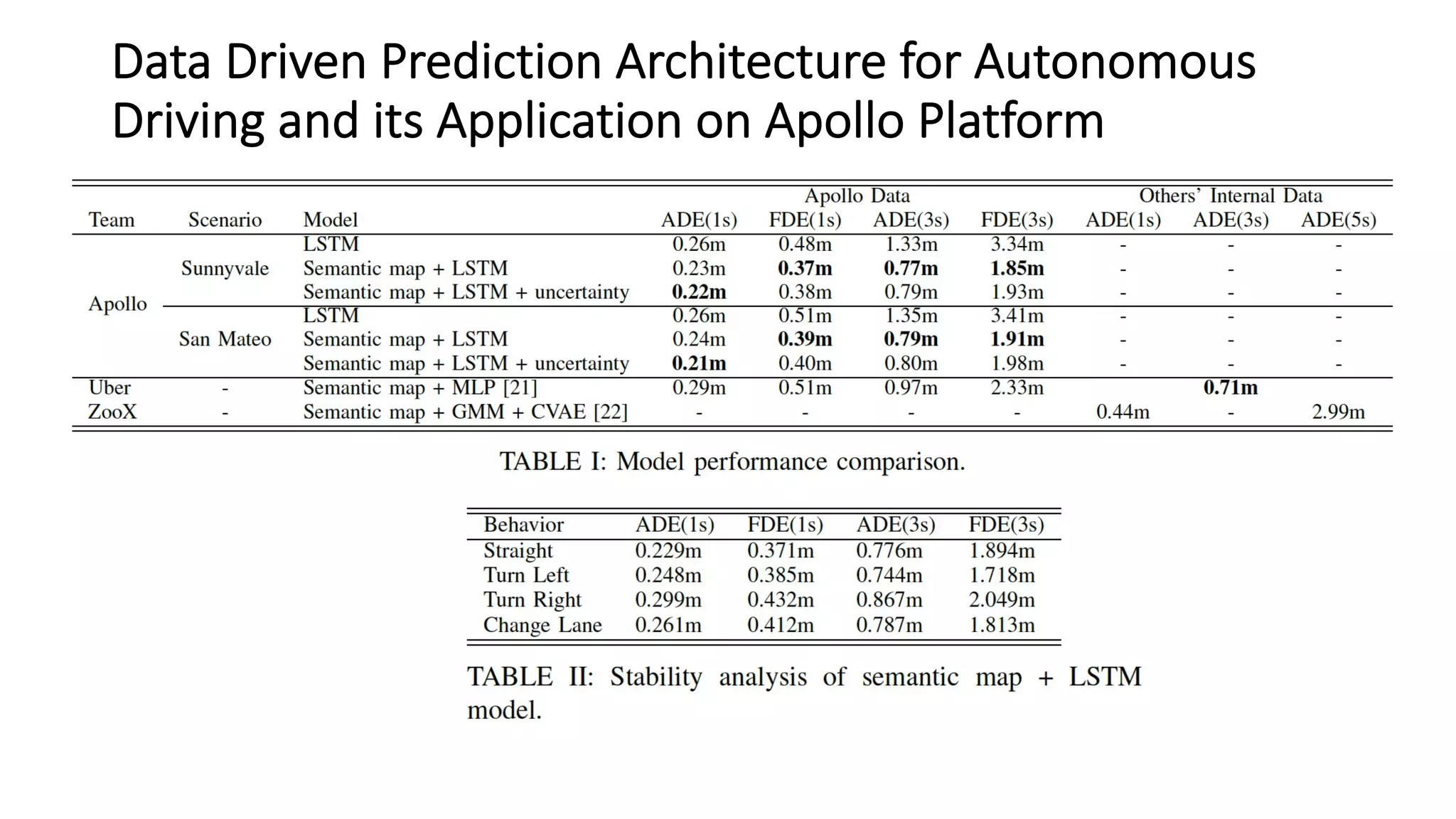

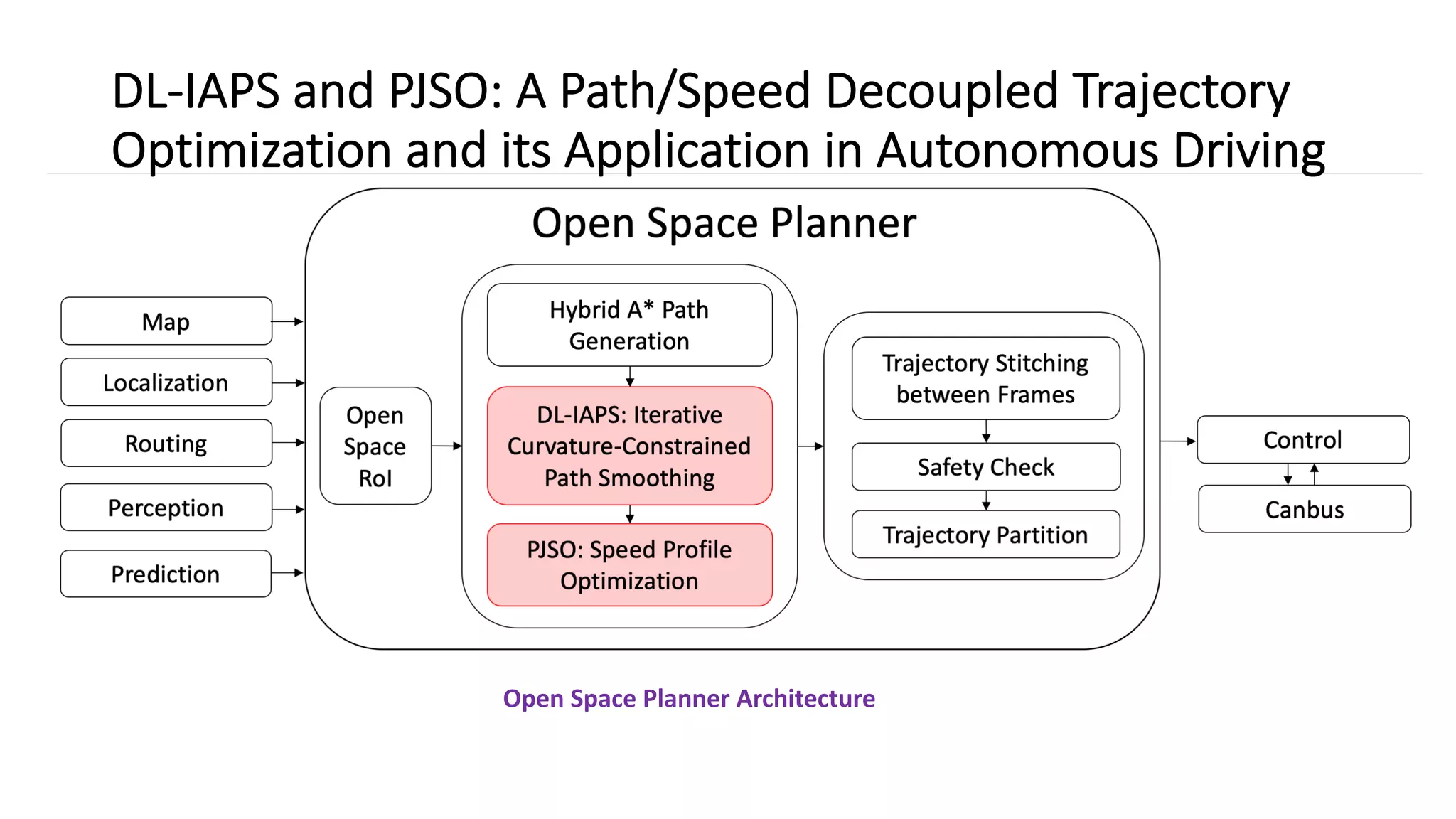











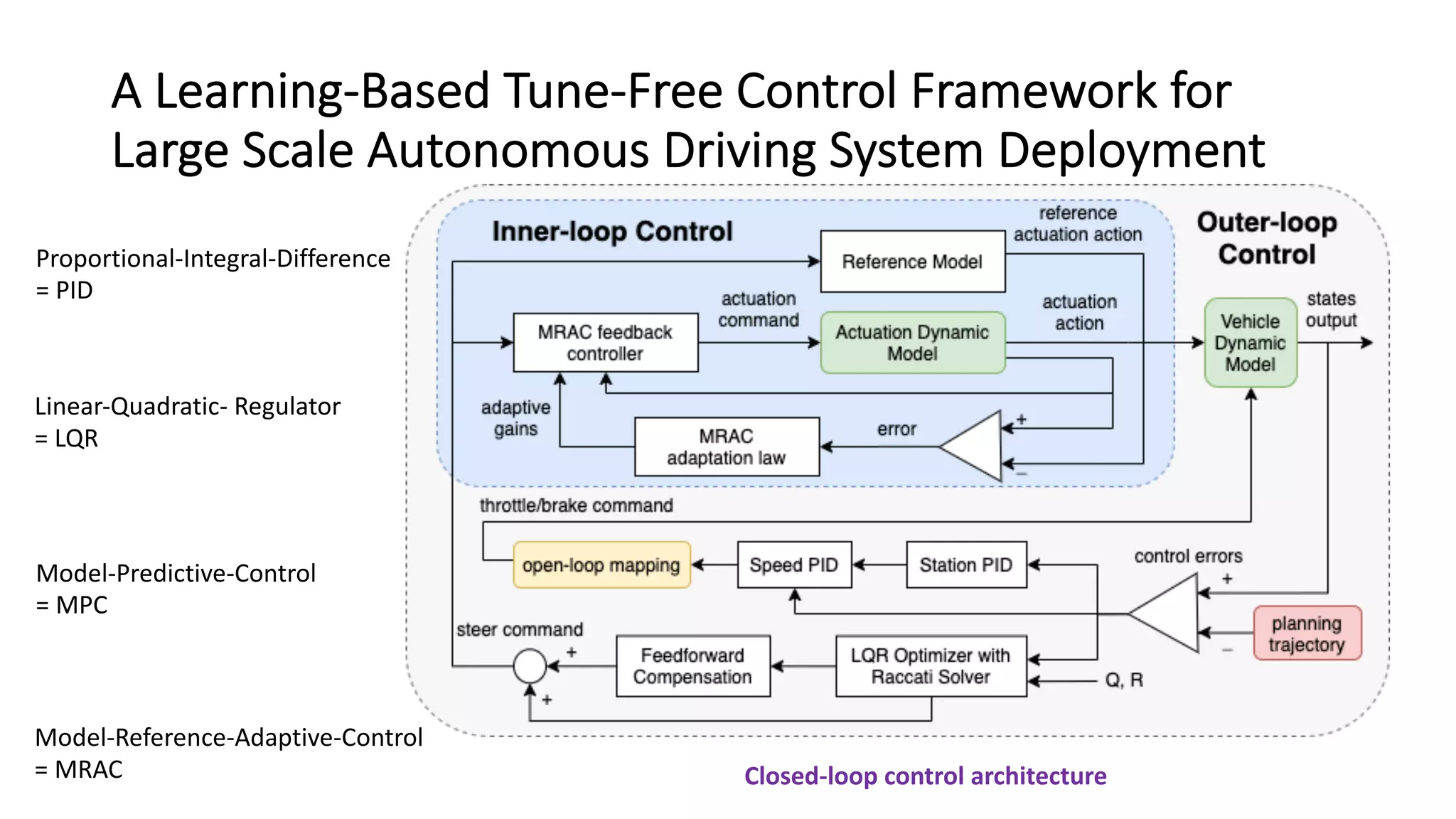


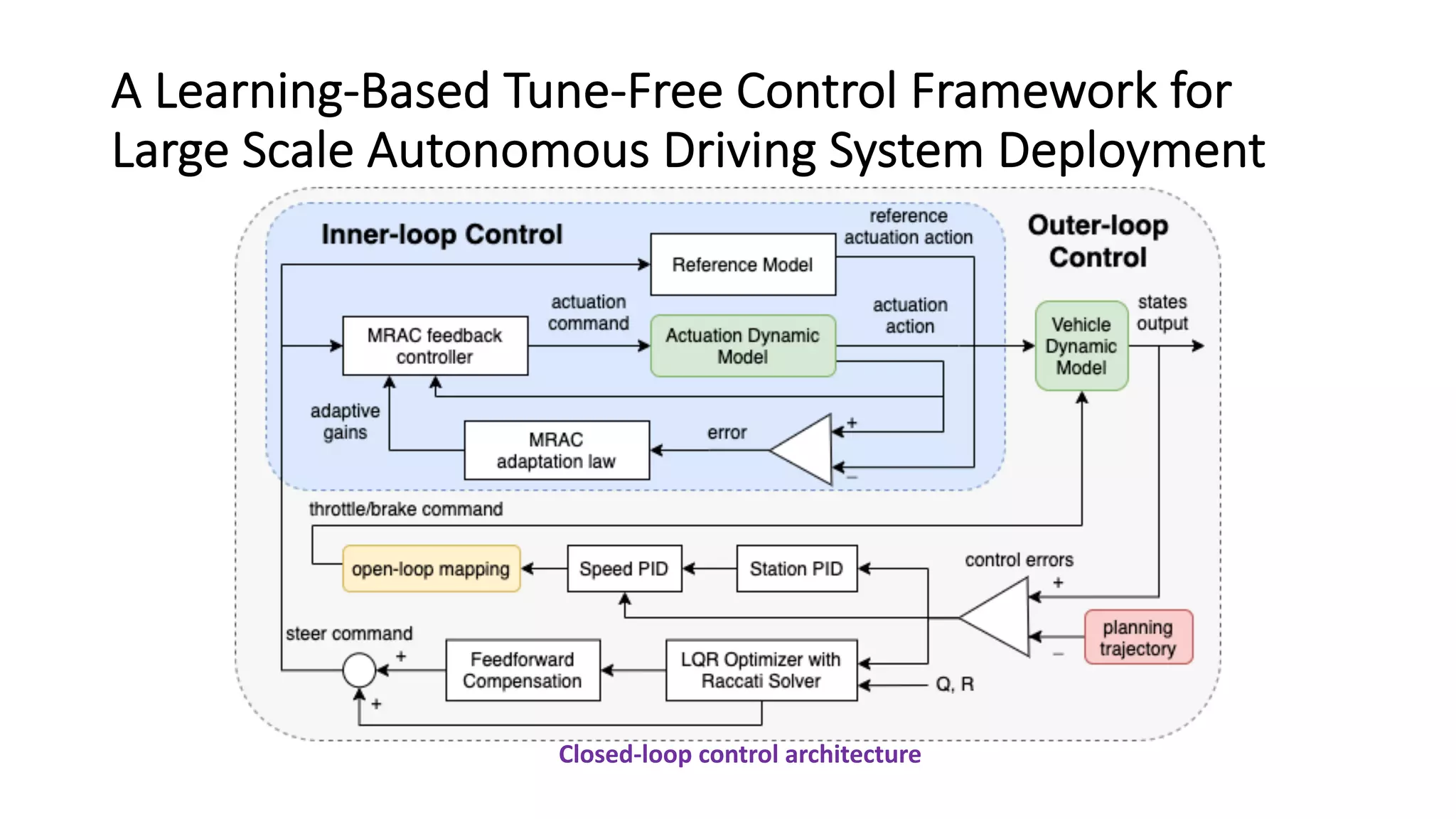
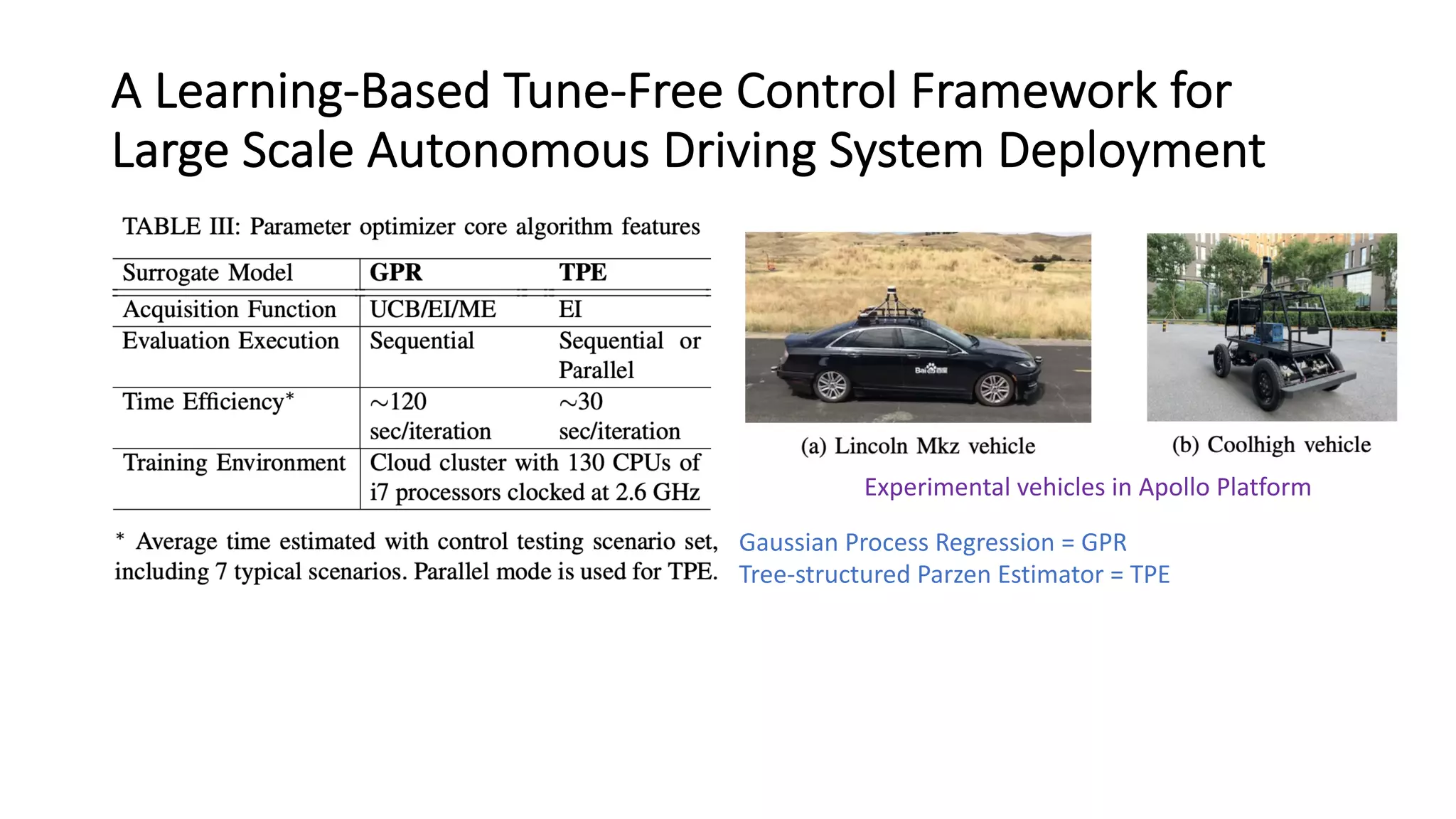



This document summarizes several papers related to data-driven methods for prediction and planning in autonomous driving systems at Baidu Apollo. The papers propose and evaluate various machine learning approaches for tasks like motion planning, trajectory optimization, vehicle modeling and control parameter tuning. Frameworks presented include an auto-tuning approach for reward functions, a prediction architecture for scaling models across regions, and a tune-free control framework using learning-based dynamic modeling and Bayesian optimization. The goal is to develop self-supervised methods to improve performance and safely deploy autonomous systems at large scale.