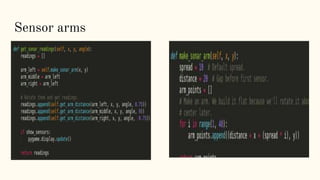
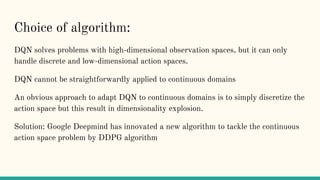
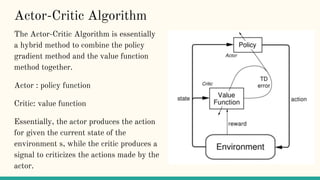
This document discusses using reinforcement learning for components of self-driving cars, including obstacle detection and controlling acceleration and braking. It describes implementing deep deterministic policy gradient (DDPG) to control a car in a TORCS environment. The key components discussed are sensors to detect obstacles, a neural network model, and using DDPG with an actor-critic algorithm to train the network and optimize acceleration and braking control. Future work mentioned includes building additional modules for tasks like detecting the car's position on the road.


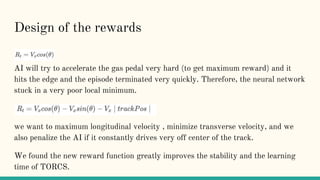
![Neural Network
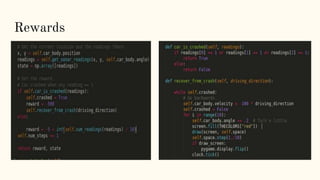
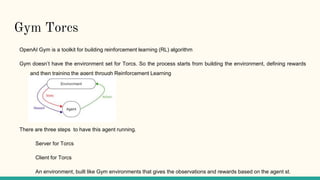
● Input data for the neural network is the input from the three sensors.
● An input layer of 3 units (because there are 3 different sensors).
● 2 hidden layers of 164 and 150 units, each hidden layer is followed by a dropout layer with dropout rate 0.2 to avoid
overfitting
● Output layer of 3, one for each of our possible actions (left, right, do nothing) [in that order].](https://image.slidesharecdn.com/rlforself-drivingcars1-170523004915/85/Reinforcement-Learning-for-Self-Driving-Cars-8-320.jpg)


![Policy
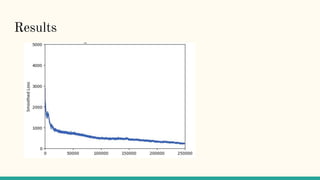
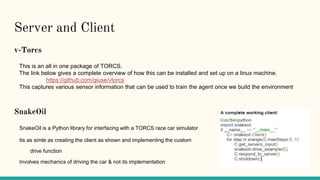
Now we can use the inputs above to feed into the neural network.
for j in range(max_steps):
a_t = actor.model.predict(s_t.reshape(1, s_t.shape[0]))
ob, r_t, done, info = env.step(a_t[0])](https://image.slidesharecdn.com/rlforself-drivingcars1-170523004915/85/Reinforcement-Learning-for-Self-Driving-Cars-33-320.jpg)

























![[PR12] You Only Look Once (YOLO): Unified Real-Time Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/yolo-170616085751-thumbnail.jpg?width=640&height=640&fit=bounds)




























![Hacking-Uncovered-How-People-Get-Hacked-and-How-to-Stay-Safe[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/hacking-uncovered-how-people-get-hacked-and-how-to-stay-safe1-260130170011-4883a9c7-thumbnail.jpg?width=640&height=640&fit=bounds)










